一种消防用无人机对接结构及使用方法与流程
[0001]
本发明属于无人机技术领域,具体一种消防用无人机对接结构及使用方法。
背景技术:
[0002]
随着城镇化的推进,高楼建设速度加快,人员密集、结构复杂的高层建筑越来越多,一旦发生火灾,给消防工作带来极大的考验,无人机在森林消防方面的应用,解决了森林消防无法顾及到偏远地区的缺点,还能够对火势、火灾范围以及火灾现场的各种信息进行及时的掌控,进行火灾救援、火情分析、火源确定、火势蔓延趋势预测、救援方案制定等,还可以对火灾后续情况进行检测,及时的发现隐藏火源,实现火灾的彻底扑灭,但是现有消防用无人机采用固定式起落架,缓冲效果较差,不利于无人机在水泥等硬质地面上平稳降落,急需研制一种消防用无人机,便于市场推广与应用。
[0003]
申请号为cn201810972385.6的中国专利公开了一种消防用无人机,包括机头,所述机头四周外表面设置有若干升降机构,该发明结构简单,构造清晰易懂,操作容易,通过升降装置带动整体设备的飞行升降,支撑装置具有伸缩缓冲作用,结构稳定,通过重力作用来实现灭火弹的释放,通过收纳管进行灭火弹的收纳,容量大,一次性灭火的范围大,此外,报警灯和红外温感探头电连接,当红外温感探头探测到设备附近温度过高时,报警灯会报警,从而避免在火场内过于深入,机头后端面中间设置有安装槽,安装槽内安装有摄像头,安装槽开口处设置有耐高温透明玻璃,用于火场情况的反馈和准确投放灭火弹。
[0004]
申请号为cn201810060055.x的中国专利公开了一种消防用无人机,包括固定在无人机底部的投弹箱,投弹箱内设置有隔板,隔板的左侧的投弹箱内设置有发射装置,其包括弹簧、发射板、支撑板、齿轮、导向块、导向块固定件、齿条、直线驱动装置、钢绳和用于绕设钢绳的卷筒,弹簧一端固定在投弹箱上,弹簧的另一端与发射板连接,导向块固定件固定投弹箱上,导向块固定件与导向块固定连接,导向块上方设置有支撑板,支撑板上开有圆孔,齿轮一侧固定连接有连接杆,连接杆穿过圆孔并与卷筒的一侧固定连接,直线驱动装置的驱动轴前端固定连接有齿条,齿条与所述齿轮相啮合,该发明可靠性高、能适应不同的灭火环境。
[0005]
然而,以上现有技术中的无人机并不能实现真正的连续消防作业,例如无人机携带的供灭火用的水耗尽的时候,就需要停机,进行加水,然后再重新起飞进行消防作业,尤其是该作火区域无水源,给消防实施作业时带来麻烦,给人们的生命财产带来相当大的危害,由此需要有针对该情况,发明一种具有连续供水,从而不间断的开展消防工作显得尤为重要。
技术实现要素:
[0006]
针对现有技术中存在的上述不足之处,本发明提供了一种消防用无人机对接结构,用以解决现有无人机不能实现真正的连续消防作业,耗费加水时间,对开展消防工作产生不利影响的问题。
[0007]
为了解决上述技术问题,本发明采用了如下技术方案:
[0008]
本发明的一种消防用无人机对接结构,包括消防无人机本体、混合部、配料部、呈空腔的蓄水部和辅助无人机本体,所述混合部和蓄水部均与所述消防无人机本体的上端连接,所述混合部与蓄水部右侧连接,所述配料部置于消防无人机本体的上端,且所述配料部与混合部的上部连接,所述消防无人机本体的下端设有多个喷头,所述混合部的外侧和底部分别设有进水口和出水口,所述出水口通过管道与喷头相连通,所述蓄水部的上端设有加水口,所述蓄水部的右侧设有出水连接口,所述出水连接口与进水口相连通,所述辅助无人机本体置于消防无人机本体的上部,且所述辅助无人机本体与蓄水部上端连接,所述辅助无人机本体的下部设有供给水箱,所述供给水箱与蓄水部的上端活动连接,且所述供给水箱与蓄水部相连通。
[0009]
本发明是一种具有连续供水,不间断的开展消防工作显得尤为重要,无人机可以进行喷水消防工作的同时,还可以同时进行加水,免去了停机加水的时间,给消防工作带来了保障。
[0010]
进一步,所述消防无人机本体的蓄水部前端设有导锁座,所述辅助无人机本体的供给水箱底部设有导锁件,所述导锁座的前端分别设有两个侧导柱孔和中导柱,两个所述侧导柱孔位于中导柱的两侧,所述导锁件分别设有两个侧导柱和中导柱孔,两个所述侧导柱孔与两个侧导柱滑动连接,所述中导柱与中导柱孔滑动连接。
[0011]
本发明的无人机在加水的准备过程中,利用辅助无人机本体的导锁件和消防无人机本体中的导锁座让其中的两个所述侧导柱孔与两个侧导柱滑动连接,所述中导柱与中导柱孔滑动连接,完成对接过程,实现了两组无人机的精准对接。
[0012]
进一步,所述给水箱的下端还设有固定座,所述固定座与导锁件的上端连接,所述固定座的尾部设有锁定部,所述锁定部与导锁件连接。
[0013]
供水对接阶段,消防无人机本体缺水需要供水时,辅助无人机本体飞行到消防无人机本体上方,辅助无人机本体的导锁件和消防无人机本体中的导锁座让其中的两个所述侧导柱孔与两个侧导柱滑动连接,所述中导柱与中导柱孔滑动连接,完成对接过程。
[0014]
进一步,所述锁定部分为上层联动单元层、下层驱动层和转动电机,所述下层驱动层置于上层联动单元层的下部,所述转动电机与下层驱动层活动连接。
[0015]
进一步,所述上层联动单元层包括锁定勾块、滑动腔室、弹簧,所述滑动腔室置于弹簧的上部,所述弹簧的一端与锁定部的内壁连接,所述弹簧的另一端与锁定勾块连接,且所述弹簧驱动所述锁定勾块在滑动腔室移动。
[0016]
本发明采用锁定部结构,进行加水对接过种结束后,对消防无人机本体和辅助无人机本体锁定,避免了飞行时产生的晃动,对加水过程产生影响。
[0017]
进一步,所述锁定勾块、滑动腔室和弹簧均两个,每个所述锁定勾块、滑动腔室和弹簧关于中导柱的中心轴线呈对称分布。
[0018]
锁定阶段,中导柱插入上层联动单元层中的两个锁定勾块之前,两个所述锁定勾块迫使两侧的弹簧在滑动腔室向上层联动单元层内壁移动,当中导柱插入到底时,两侧的弹簧回弹,使两个锁定勾块朝中导柱径向移动,中导柱的头部与两个锁定勾块配合,对消防无人机本体和辅助无人机本体的限位移动,完成锁定。
[0019]
进一步,所述下层驱动层包括第一连杆、第二连杆和转动杆,所述第一连杆和第二
连杆的一端分别与所述转动杆的两端转动连接,所述第一连杆和第二连杆的另一端分别与两个锁定勾块的下端连接,且所述第一连杆、第二连杆和弹簧位于同一水平线上,所述转动杆与转动电机连接。
[0020]
解锁阶段,所述下层驱动层中,所述转动电机转动,带动所述第一连杆、第二连杆转动,同时所述第一连杆和第二连杆的另一端分别带动两个锁定勾块向所述下层驱动层内壁移动,中导柱的头部与两个锁定勾块相分离,对消防无人机本体和辅助无人机本体的限位解除,完成解锁。
[0021]
进一步,所述供给水箱的下部还设有电量收集装置,所述电量收集装置包括两条带齿的滑轨和两个电量转换部,两条带齿的所述滑轨与固定座的两侧连接,两个所述电量转换部对称分布于蓄水部的两侧,且两个所述电量转换部与蓄水部的上端连接,两个所述电量转换部分别可在两条滑轨上滑动。
[0022]
进一步,所述电量转换部包括底板、底齿轮、第一顶齿轮、第二顶齿轮、大齿轮和电路板,所述底齿轮与第一顶齿轮分别连接与底板的底部和上部,且所述底齿轮与第一顶齿轮的中心轴线重合,所述大齿轮与底板的顶部中心处转动连接,所述第一顶齿轮与第二顶齿轮均与大齿轮啮合,第二顶齿轮的底部与发电件连接,所述发电件与电路板均与辅助无人机本体内部的电池电性连接。
[0023]
本发明在进行对接的过程中,把对接过程中的动能转换成可利用的电量,采用电量转换部分别可在两条滑轨上滑动,动能经电量转换部的作用,把本会在对接过程过产生的撞击力巧妙的利用,转换成电量储存起来,环保节能。
[0024]
上述的一种消防用无人机对接结构的使用方法,包括以下步骤:
[0025]
s1:组装阶段,所述混合部和蓄水部均与所述消防无人机本体的上端连接,所述混合部与蓄水部右侧连接,所述配料部置于消防无人机本体的上端,且所述配料部与混合部的上部连接,所述消防无人机本体的下端设有多个喷头,所述混合部的外侧和底部分别设有进水口和出水口,所述出水口通过管道与喷头相连通,所述蓄水部的上端设有加水口,所述蓄水部的右侧设有出水连接口,所述出水连接口与进水口相连通,所述辅助无人机本体置于消防无人机本体的上部,且所述辅助无人机本体与蓄水部上端连接,所述辅助无人机本体的下部设有供给水箱,所述供给水箱与蓄水部的上端活动连接,且所述供给水箱与蓄水部相连通;
[0026]
s2:供水对接阶段,消防无人机本体缺水需要供水时,辅助无人机本体飞行到消防无人机本体上方,辅助无人机本体的导锁件和消防无人机本体中的导锁座让其中的两个所述侧导柱孔与两个侧导柱滑动连接,所述中导柱与中导柱孔滑动连接,完成对接过程;
[0027]
s3:能量收集阶段,两个所述电量转换部分别可在两条滑轨上滑动,所述底齿轮与第一顶齿轮分别连接与底板的底部和上部,所述大齿轮与底板的顶部中心处转动连接,所述第一顶齿轮与第二顶齿轮均与大齿轮啮合,第二顶齿轮的底部与发电件连接,所述发电件与电路板均与辅助无人机本体内部的电池电性连接;
[0028]
s4:锁定阶段,中导柱插入上层联动单元层中的两个锁定勾块之前,两个所述锁定勾块迫使两侧的弹簧在滑动腔室向上层联动单元层内壁移动,当中导柱插入到底时,两侧的弹簧回弹,使两个锁定勾块朝中导柱径向移动,中导柱的头部与两个锁定勾块配合,对消防无人机本体和辅助无人机本体的限位移动,完成锁定;
[0029]
s5:解锁阶段,所述下层驱动层中,所述转动电机转动,带动所述第一连杆、第二连杆转动,同时所述第一连杆和第二连杆的另一端分别带动两个锁定勾块向所述下层驱动层内壁移动,中导柱的头部与两个锁定勾块相分离,对消防无人机本体和辅助无人机本体的限位解除,完成解锁。
[0030]
本发明与现有技术相比,具有如下有益效果:
[0031]
1.无人机可以进行喷水消防工作的同时,还可以同时进行加水,免去了停机加水的时间,给消防工作带来了保障;
[0032]
2.本发明的无人机在加水的准备过程中,利用辅助无人机本体的导锁件和消防无人机本体中的导锁座让其中的两个所述侧导柱孔与两个侧导柱滑动连接,所述中导柱与中导柱孔滑动连接,完成对接过程,实现了两组无人机的精准对接;
[0033]
3.本发明在进行对接的过程中,把对接过程中的动能转换成可利用的电量,采用电量转换部分别可在两条滑轨上滑动,动能经电量转换部的作用,把本会在对接过程过产生的撞击力巧妙的利用,转换成电量储存起来,环保节能;
[0034]
4.本发明采用锁定部结构,进行加水对接过种结束后,对消防无人机本体和辅助无人机本体锁定,避免了飞行时产生的晃动,对加水过程产生影响。
附图说明
[0035]
图1为本发明一种消防用无人机对接结构实施例的立体结构示意图(视角一);
[0036]
图2为本发明一种消防用无人机对接结构实施例的立体结构示意图(视角二);
[0037]
图3为本发明一种消防用无人机对接结构实施例的立体结构示意图(视角三);
[0038]
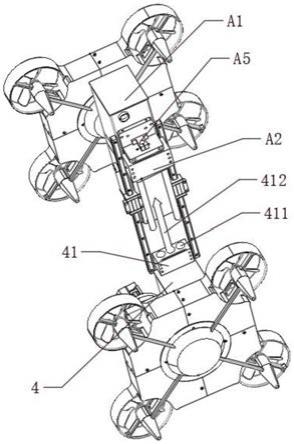
图4为本发明一种消防用无人机对接结构实施例的左视结构示意图;
[0039]
图5为本发明一种消防用无人机对接结构实施例中上层联动单元层的剖视结构示意图;
[0040]
图6为本发明一种消防用无人机对接结构实施例中下层驱动层的剖视结构示意图;
[0041]
图7为本发明一种消防用无人机对接结构实施例中滑轨和电量转换部的分解结构示意图。
[0042]
说明书附图中的附图标记包括:
[0043]
消防无人机本体1、管道11、喷头12、混合部2、配料部3、呈空腔的蓄水部4、导锁座41、侧导柱孔411、中导柱412、辅助无人机本体a、给水箱a1、导锁件a2、侧导柱a21、中导柱孔a22、固定座a3、锁定部a4、上层联动单元层a40、锁定勾块a400、滑动腔室a401、弹簧a402、下层驱动层a41、第一连杆a411、第二连杆a412、转动杆a413、转动电机a5、电量收集装置a6、滑轨a61、电量转换部a62、底板a621、底齿轮a622、第一顶齿轮a623、第二顶齿轮a624、大齿轮a625、电路板a626。
具体实施方式
[0044]
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
[0045]
实施例一:
[0046]
如图1-7所示,本发明的一种消防用无人机对接结构,包括消防无人机本体1、混合部2、配料部3、呈空腔的蓄水部4和辅助无人机本体a,混合部2和蓄水部4均与消防无人机本体1的上端连接,混合部2与蓄水部4右侧连接,配料部3置于消防无人机本体1的上端,且配料部3与混合部2的上部连接,消防无人机本体1的下端设有多个喷头12,混合部2的外侧和底部分别设有进水口和出水口,出水口通过管道11与喷头12相连通,蓄水部4的上端设有加水口,蓄水部4的右侧设有出水连接口,出水连接口与进水口相连通,辅助无人机本体a置于消防无人机本体1的上部,且辅助无人机本体a与蓄水部4上端连接,辅助无人机本体a的下部设有供给水箱a1,供给水箱a1与蓄水部4的上端活动连接,且供给水箱a1与蓄水部4相连通。
[0047]
现有技术中的无人机并不能实现真正的连续消防作业,例如无人机携带的供灭火用的水耗尽的时候,就需要停机,进行加水,然后再重新起飞进行消防作业,尤其是该作火区域无水源,给消防实施作业时带来麻烦,对给人们的生命财产带来相当大的危害,由此需要有针对该情况,发明一种具有连续供水,从而不间断的开展消防工作显得尤为重要,无人机可以进行喷水消防工作的同时,还可以同时进行加水,免去了停机加水的时间,给消防工作带来了保障。
[0048]
作为优选方案,消防无人机本体1的蓄水部4前端设有导锁座41,辅助无人机本体a的供给水箱a1底部设有导锁件a2,导锁座41的前端分别设有两个侧导柱孔411和中导柱412,两个侧导柱孔411位于中导柱412的两侧,导锁件a2分别设有两个侧导柱a21和中导柱孔a22,两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接。
[0049]
本发明的无人机在加水的准备过程中,利用辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程,实现了两组无人机的精准对接。
[0050]
作为优选方案,给水箱a1的下端还设有固定座a3,固定座a3与导锁件a2的上端连接,固定座a3的尾部设有锁定部a4,锁定部a4与导锁件a2连接。
[0051]
供水对接阶段,消防无人机本体1缺水需要供水时,辅助无人机本体a飞行到消防无人机本体1上方,辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程。
[0052]
作为优选方案,锁定部a4分为上层联动单元层a40、下层驱动层a41和转动电机a5,下层驱动层a41置于上层联动单元层a40的下部,转动电机a5与下层驱动层a41活动连接。
[0053]
作为优选方案,上层联动单元层a40包括锁定勾块a400、滑动腔室a401、弹簧a402,滑动腔室a401置于弹簧a402的上部,弹簧a402的一端与锁定部a4的内壁连接,弹簧a402的另一端与锁定勾块a400连接,且弹簧a402驱动锁定勾块a400在滑动腔室a401移动。
[0054]
本发明采用锁定部a4结构,进行加水对接过种结束后,对消防无人机本体1和辅助无人机本体a锁定,避免了飞行时产生的晃动,对加水过程产生影响。
[0055]
作为优选方案,锁定勾块a400、滑动腔室a401和弹簧a402均两个,每个锁定勾块a400、滑动腔室a401和弹簧a402关于中导柱412的中心轴线呈对称分布。
[0056]
锁定阶段,中导柱412插入上层联动单元层a40中的两个锁定勾块a400之前,两个锁定勾块a400迫使两侧的弹簧a402在滑动腔室a401向上层联动单元层a40内壁移动,当中
导柱412插入到底时,两侧的弹簧a402回弹,使两个锁定勾块a400朝中导柱412径向移动,中导柱412的头部与两个锁定勾块a400配合,对消防无人机本体1和辅助无人机本体a的限位移动,完成锁定。
[0057]
作为优选方案,下层驱动层a41包括第一连杆a411、第二连杆a412和转动杆a413,第一连杆a411和第二连杆a412的一端分别与转动杆a413的两端转动连接,第一连杆a411和第二连杆a412的另一端分别与两个锁定勾块a400的下端连接,且第一连杆a411、第二连杆a412和弹簧a402位于同一水平线上,转动杆a413与转动电机a5连接。
[0058]
解锁阶段,下层驱动层a41中,转动电机a5转动,带动第一连杆a411、第二连杆a412转动,同时第一连杆a411和第二连杆a412的另一端分别带动两个锁定勾块a400向下层驱动层a41内壁移动,中导柱412的头部与两个锁定勾块a400相分离,对消防无人机本体1和辅助无人机本体a的限位解除,完成解锁。
[0059]
实施例二:
[0060]
本实施例作为上一实施例的进一步改进,如图1-7所示,本发明的一种消防用无人机对接结构,包括消防无人机本体1、混合部2、配料部3、呈空腔的蓄水部4和辅助无人机本体a,混合部2和蓄水部4均与消防无人机本体1的上端连接,混合部2与蓄水部4右侧连接,配料部3置于消防无人机本体1的上端,且配料部3与混合部2的上部连接,消防无人机本体1的下端设有多个喷头12,混合部2的外侧和底部分别设有进水口和出水口,出水口通过管道11与喷头12相连通,蓄水部4的上端设有加水口,蓄水部4的右侧设有出水连接口,出水连接口与进水口相连通,辅助无人机本体a置于消防无人机本体1的上部,且辅助无人机本体a与蓄水部4上端连接,辅助无人机本体a的下部设有供给水箱a1,供给水箱a1与蓄水部4的上端活动连接,且供给水箱a1与蓄水部4相连通。
[0061]
现有技术中的无人机并不能实现真正的连续消防作业,例如无人机携带的供灭火用的水耗尽的时候,就需要停机,进行加水,然后再重新起飞进行消防作业,尤其是该作火区域无水源,给消防实施作业时带来麻烦,对给人们的生命财产带来相当大的危害,由此需要有针对该情况,发明一种具有连续供水,从而不间断的开展消防工作显得尤为重要,无人机可以进行喷水消防工作的同时,还可以同时进行加水,免去了停机加水的时间,给消防工作带来了保障。
[0062]
作为优选方案,消防无人机本体1的蓄水部4前端设有导锁座41,辅助无人机本体a的供给水箱a1底部设有导锁件a2,导锁座41的前端分别设有两个侧导柱孔411和中导柱412,两个侧导柱孔411位于中导柱412的两侧,导锁件a2分别设有两个侧导柱a21和中导柱孔a22,两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接。
[0063]
本发明的无人机在加水的准备过程中,利用辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程,实现了两组无人机的精准对接。
[0064]
作为优选方案,给水箱a1的下端还设有固定座a3,固定座a3与导锁件a2的上端连接,固定座a3的尾部设有锁定部a4,锁定部a4与导锁件a2连接。
[0065]
供水对接阶段,消防无人机本体1缺水需要供水时,辅助无人机本体a飞行到消防无人机本体1上方,辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成
对接过程。
[0066]
作为优选方案,锁定部a4分为上层联动单元层a40、下层驱动层a41和转动电机a5,下层驱动层a41置于上层联动单元层a40的下部,转动电机a5与下层驱动层a41活动连接。
[0067]
作为优选方案,上层联动单元层a40包括锁定勾块a400、滑动腔室a401、弹簧a402,滑动腔室a401置于弹簧a402的上部,弹簧a402的一端与锁定部a4的内壁连接,弹簧a402的另一端与锁定勾块a400连接,且弹簧a402驱动锁定勾块a400在滑动腔室a401移动。
[0068]
本发明采用锁定部a4结构,进行加水对接过种结束后,对消防无人机本体1和辅助无人机本体a锁定,避免了飞行时产生的晃动,对加水过程产生影响。
[0069]
作为优选方案,锁定勾块a400、滑动腔室a401和弹簧a402均两个,每个锁定勾块a400、滑动腔室a401和弹簧a402关于中导柱412的中心轴线呈对称分布。
[0070]
锁定阶段,中导柱412插入上层联动单元层a40中的两个锁定勾块a400之前,两个锁定勾块a400迫使两侧的弹簧a402在滑动腔室a401向上层联动单元层a40内壁移动,当中导柱412插入到底时,两侧的弹簧a402回弹,使两个锁定勾块a400朝中导柱412径向移动,中导柱412的头部与两个锁定勾块a400配合,对消防无人机本体1和辅助无人机本体a的限位移动,完成锁定。
[0071]
作为优选方案,下层驱动层a41包括第一连杆a411、第二连杆a412和转动杆a413,第一连杆a411和第二连杆a412的一端分别与转动杆a413的两端转动连接,第一连杆a411和第二连杆a412的另一端分别与两个锁定勾块a400的下端连接,且第一连杆a411、第二连杆a412和弹簧a402位于同一水平线上,转动杆a413与转动电机a5连接。
[0072]
解锁阶段,下层驱动层a41中,转动电机a5转动,带动第一连杆a411、第二连杆a412转动,同时第一连杆a411和第二连杆a412的另一端分别带动两个锁定勾块a400向下层驱动层a41内壁移动,中导柱412的头部与两个锁定勾块a400相分离,对消防无人机本体1和辅助无人机本体a的限位解除,完成解锁。
[0073]
作为优选方案,供给水箱a1的下部还设有电量收集装置a6,电量收集装置a6包括两条带齿的滑轨a61和两个电量转换部a62,两条带齿的滑轨a61与固定座a3的两侧连接,两个电量转换部a62对称分布于蓄水部4的两侧,且两个电量转换部a62与蓄水部4的上端连接,两个电量转换部a62分别可在两条滑轨a61上滑动。
[0074]
实施例二相对于实施例一来说,实施例二中供给水箱a1的下部还设有电量收集装置a6,电量收集装置a6包括两条带齿的滑轨a61和两个电量转换部a62,两条带齿的滑轨a61与固定座a3的两侧连接,两个电量转换部a62对称分布于蓄水部4的两侧,且两个电量转换部a62与蓄水部4的上端连接,两个电量转换部a62分别可在两条滑轨a61上滑动。
[0075]
实施例三:
[0076]
本实施例作为上一实施例的进一步改进,如图1-7所示,本发明的一种消防用无人机对接结构,包括消防无人机本体1、混合部2、配料部3、呈空腔的蓄水部4和辅助无人机本体a,混合部2和蓄水部4均与消防无人机本体1的上端连接,混合部2与蓄水部4右侧连接,配料部3置于消防无人机本体1的上端,且配料部3与混合部2的上部连接,消防无人机本体1的下端设有多个喷头12,混合部2的外侧和底部分别设有进水口和出水口,出水口通过管道11与喷头12相连通,蓄水部4的上端设有加水口,蓄水部4的右侧设有出水连接口,出水连接口与进水口相连通,辅助无人机本体a置于消防无人机本体1的上部,且辅助无人机本体a与蓄
水部4上端连接,辅助无人机本体a的下部设有供给水箱a1,供给水箱a1与蓄水部4的上端活动连接,且供给水箱a1与蓄水部4相连通。
[0077]
现有技术中的无人机并不能实现真正的连续消防作业,例如无人机携带的供灭火用的水耗尽的时候,就需要停机,进行加水,然后再重新起飞进行消防作业,尤其是该作火区域无水源,给消防实施作业时带来麻烦,对给人们的生命财产带来相当大的危害,由此需要有针对该情况,发明一种具有连续供水,从而不间断的开展消防工作显得尤为重要,无人机可以进行喷水消防工作的同时,还可以同时进行加水,免去了停机加水的时间,给消防工作带来了保障。
[0078]
作为优选方案,消防无人机本体1的蓄水部4前端设有导锁座41,辅助无人机本体a的供给水箱a1底部设有导锁件a2,导锁座41的前端分别设有两个侧导柱孔411和中导柱412,两个侧导柱孔411位于中导柱412的两侧,导锁件a2分别设有两个侧导柱a21和中导柱孔a22,两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接。
[0079]
本发明的无人机在加水的准备过程中,利用辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程,实现了两组无人机的精准对接。
[0080]
作为优选方案,给水箱a1的下端还设有固定座a3,固定座a3与导锁件a2的上端连接,固定座a3的尾部设有锁定部a4,锁定部a4与导锁件a2连接。
[0081]
供水对接阶段,消防无人机本体1缺水需要供水时,辅助无人机本体a飞行到消防无人机本体1上方,辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程。
[0082]
作为优选方案,锁定部a4分为上层联动单元层a40、下层驱动层a41和转动电机a5,下层驱动层a41置于上层联动单元层a40的下部,转动电机a5与下层驱动层a41活动连接。
[0083]
作为优选方案,上层联动单元层a40包括锁定勾块a400、滑动腔室a401、弹簧a402,滑动腔室a401置于弹簧a402的上部,弹簧a402的一端与锁定部a4的内壁连接,弹簧a402的另一端与锁定勾块a400连接,且弹簧a402驱动锁定勾块a400在滑动腔室a401移动。
[0084]
本发明采用锁定部a4结构,进行加水对接过种结束后,对消防无人机本体1和辅助无人机本体a锁定,避免了飞行时产生的晃动,对加水过程产生影响。
[0085]
作为优选方案,锁定勾块a400、滑动腔室a401和弹簧a402均两个,每个锁定勾块a400、滑动腔室a401和弹簧a402关于中导柱412的中心轴线呈对称分布。
[0086]
锁定阶段,中导柱412插入上层联动单元层a40中的两个锁定勾块a400之前,两个锁定勾块a400迫使两侧的弹簧a402在滑动腔室a401向上层联动单元层a40内壁移动,当中导柱412插入到底时,两侧的弹簧a402回弹,使两个锁定勾块a400朝中导柱412径向移动,中导柱412的头部与两个锁定勾块a400配合,对消防无人机本体1和辅助无人机本体a的限位移动,完成锁定。
[0087]
作为优选方案,下层驱动层a41包括第一连杆a411、第二连杆a412和转动杆a413,第一连杆a411和第二连杆a412的一端分别与转动杆a413的两端转动连接,第一连杆a411和第二连杆a412的另一端分别与两个锁定勾块a400的下端连接,且第一连杆a411、第二连杆a412和弹簧a402位于同一水平线上,转动杆a413与转动电机a5连接。
[0088]
解锁阶段,下层驱动层a41中,转动电机a5转动,带动第一连杆a411、第二连杆a412转动,同时第一连杆a411和第二连杆a412的另一端分别带动两个锁定勾块a400向下层驱动层a41内壁移动,中导柱412的头部与两个锁定勾块a400相分离,对消防无人机本体1和辅助无人机本体a的限位解除,完成解锁。
[0089]
作为优选方案,供给水箱a1的下部还设有电量收集装置a6,电量收集装置a6包括两条带齿的滑轨a61和两个电量转换部a62,两条带齿的滑轨a61与固定座a3的两侧连接,两个电量转换部a62对称分布于蓄水部4的两侧,且两个电量转换部a62与蓄水部4的上端连接,两个电量转换部a62分别可在两条滑轨a61上滑动。
[0090]
作为优选方案,电量转换部a62包括底板a621、底齿轮a622、第一顶齿轮a623、第二顶齿轮a624、大齿轮a625和电路板a626,底齿轮a622与第一顶齿轮a623分别连接与底板a621的底部和上部,且底齿轮a622与第一顶齿轮a623的中心轴线重合,大齿轮与底板a621的顶部中心处转动连接,第一顶齿轮a623与第二顶齿轮a624均与大齿轮a625啮合,第二顶齿轮a624的底部与发电件连接,发电件与电路板a626均与辅助无人机本体a内部的电池电性连接。
[0091]
能量收集阶段,两个电量转换部a62分别可在两条滑轨a61上滑动,底齿轮a622与第一顶齿轮a623分别连接与底板a621的底部和上部,大齿轮与底板a621的顶部中心处转动连接,第一顶齿轮a623与第二顶齿轮a624均与大齿轮a625啮合,第二顶齿轮a624的底部与发电件连接,发电件与电路板a626均与辅助无人机本体a内部的电池电性连接,本发明在进行对接的过程中,把对接过程中的动能转换成可利用的电量,采用电量转换部a62分别可在两条滑轨a61上滑动,动能经电量转换部a62的作用,把本会在对接过程过产生的撞击力巧妙的利用,转换成电量储存起来,环保节能。
[0092]
实施例三相对于实施例二来说,实施例三中电量转换部a62包括底板a621、底齿轮a622、第一顶齿轮a623、第二顶齿轮a624、大齿轮a625和电路板a626,底齿轮a622与第一顶齿轮a623分别连接与底板a621的底部和上部,且底齿轮a622与第一顶齿轮a623的中心轴线重合,大齿轮与底板a621的顶部中心处转动连接,第一顶齿轮a623与第二顶齿轮a624均与大齿轮a625啮合,第二顶齿轮a624的底部与发电件连接,发电件与电路板a626均与辅助无人机本体a内部的电池电性连接。能量收集阶段,两个电量转换部a62分别可在两条滑轨a61上滑动,底齿轮a622与第一顶齿轮a623分别连接与底板a621的底部和上部,大齿轮与底板a621的顶部中心处转动连接,第一顶齿轮a623与第二顶齿轮a624均与大齿轮a625啮合,第二顶齿轮a624的底部与发电件连接,发电件与电路板a626均与辅助无人机本体a内部的电池电性连接,本发明在进行对接的过程中,把对接过程中的动能转换成可利用的电量,采用电量转换部a62分别可在两条滑轨a61上滑动,动能经电量转换部a62的作用,把本会在对接过程过产生的撞击力巧妙的利用,转换成电量储存起来,环保节能。
[0093]
上述的一种消防用无人机对接结构的使用方法,包括以下步骤:
[0094]
s1:组装阶段,混合部2和蓄水部4均与消防无人机本体1的上端连接,混合部2与蓄水部4右侧连接,配料部3置于消防无人机本体1的上端,且配料部3与混合部2的上部连接,消防无人机本体1的下端设有多个喷头12,混合部2的外侧和底部分别设有进水口和出水口,出水口通过管道11与喷头12相连通,蓄水部4的上端设有加水口,蓄水部4的右侧设有出水连接口,出水连接口与进水口相连通,辅助无人机本体a置于消防无人机本体1的上部,且
辅助无人机本体a与蓄水部4上端连接,辅助无人机本体a的下部设有供给水箱a1,供给水箱a1与蓄水部4的上端活动连接,且供给水箱a1与蓄水部4相连通;
[0095]
s2:供水对接阶段,消防无人机本体1缺水需要供水时,辅助无人机本体a飞行到消防无人机本体1上方,辅助无人机本体a的导锁件a2和消防无人机本体1中的导锁座41让其中的两个侧导柱孔411与两个侧导柱a21滑动连接,中导柱412与中导柱孔a22滑动连接,完成对接过程;
[0096]
s3:能量收集阶段,两个电量转换部a62分别可在两条滑轨a61上滑动,底齿轮a622与第一顶齿轮a623分别连接与底板a621的底部和上部,大齿轮与底板a621的顶部中心处转动连接,第一顶齿轮a623与第二顶齿轮a624均与大齿轮a625啮合,第二顶齿轮a624的底部与发电件连接,发电件与电路板a626均与辅助无人机本体a内部的电池电性连接;
[0097]
s4:锁定阶段,中导柱412插入上层联动单元层a40中的两个锁定勾块a400之前,两个锁定勾块a400迫使两侧的弹簧a402在滑动腔室a401向上层联动单元层a40内壁移动,当中导柱412插入到底时,两侧的弹簧a402回弹,使两个锁定勾块a400朝中导柱412径向移动,中导柱412的头部与两个锁定勾块a400配合,对消防无人机本体1和辅助无人机本体a的限位移动,完成锁定;
[0098]
s5:解锁阶段,下层驱动层a41中,转动电机a5转动,带动第一连杆a411、第二连杆a412转动,同时第一连杆a411和第二连杆a412的另一端分别带动两个锁定勾块a400向下层驱动层a41内壁移动,中导柱412的头部与两个锁定勾块a400相分离,对消防无人机本体1和辅助无人机本体a的限位解除,完成解锁。
[0099]
以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1