一种竹林灭火系统和隔离带制作机器人的制作方法
[0001]
本实用新型属于智能灭火技术领域,尤其涉及一种竹林灭火系统和隔离带制作机器人。
背景技术:
[0002]
竹林林间的火灾防治对于林间火灾智能化防治具有十分重要的意义。目前竹子通常是成片的大面积种植,一旦发生火灾,不仅经济损失巨大,而且灭火也十分困难,容易给灭火人员带来伤亡。
[0003]
随着我国农林业现代化智能程度的不断加快,如何安全高效的防治竹林火灾对实现林间智能化管理有着重要意义,一方面有助于对竹林火灾可以做到及时反应,降低经济损失,另一方面有助于减少人员伤亡。因此,如何安全高效的防治竹林火灾对实现林间智能化管理有着重要意义,对于推进现代信息技术与农林业的深度跨界融合也具有实际理论意义。
[0004]
现有的灭火机器人大多采用独立工作的方式,仅仅能实现简单地对着火焰喷洒水或者其它灭火剂的作用,没有考虑到机器人灭火时所处的特殊环境,可靠性差。
技术实现要素:
[0005]
本实用新型实施例的目的在于提供一种竹林灭火系统,旨在解决现有的灭火机器人大多采用独立工作的方式,仅仅能实现简单地对着火焰喷洒水或者其它灭火剂的作用,没有考虑到机器人灭火时所处的特殊环境,可靠性差的问题。
[0006]
本实用新型实施例是这样实现的,一种竹林灭火系统,所述竹林灭火智能机器人系统包括隔离带制作机器人和灭火机器人;
[0007]
所述隔离带制作机器人用于竹子的定向砍伐以制作防火隔离带,包括定向伐竹模块、小型履带智能移动平台、第一测距模块、相机除尘装置、第一温度监控模块、第一电池模块以及第一控制模块;
[0008]
所述定向伐竹模块设置于所述小型履带智能移动平台上,用于砍伐竹子并使竹子倒向指定方向;
[0009]
所述小型履带智能移动平台用于驱动所述隔离带制作机器人在竹林中移动;
[0010]
所述第一测距模块用于测量周边火焰到所述隔离带制作机器人的距离,所述第一测距模块包括火焰测距装置和前方测距装置;所述火焰测距装置和前方测距装置均包括microsoft kinect v2深度相机以及所述相机除尘装置;所述前方测距装置安装于所述小型履带智能移动平台底部;
[0011]
所述相机除尘装置设置于所述第一测距模块上,用于对深度相机镜头进行清洁;
[0012]
所述第一温度监控模块用于监测所述第一测距模块、第一电池模块的温度并将温度信息反馈至所述第一控制模块;
[0013]
所述第一电池模块用于为所述隔离带制作机器人中的各个模块供电;
[0014]
所述第一控制模块分别与所述定向伐竹模块、所述小型履带智能移动平台、所述第一测距模块、所述相机除尘装置以及所述第一温度监控模块电气连接,用于接收并处理所述测距模块传输的图像数据,以控制所述小型履带智能移动平台移动,并控制所述定向伐竹模块砍伐竹子;
[0015]
所述灭火机器人包括大型履带智能移动平台、灭火模块、相机防尘及除尘复合装置、第二温度监控模块、第二测距模块、第二控制模块、第二电池模块;
[0016]
所述大型履带智能移动平台用于驱动所述灭火机器人在竹林中移动,平台内设置有运输腔,用于放置所述隔离带制作机器人以将其运抵火灾现场;
[0017]
所述灭火模块用于扑灭竹林中的火灾;
[0018]
所述相机防尘及除尘复合装置用于对深度相机镜头进行清洁;
[0019]
所述第二温度监控模块用于监控灭火机器人各个模块的温度并反馈至所述第二控制模块;
[0020]
所述第二测距模块用于测量灭火机器人到火焰的距离并测量灭火机构到火焰的距离以及测量所述隔离带制作机器人的方位;
[0021]
所述第二电池模块用于为所述灭火机器人的各个模块供电。
[0022]
优选地,所述定向伐竹模块还包括机械臂、竹子固定装置、伐竹装置、竹子测距装置;
[0023]
所述机械臂设置于所述小型履带智能移动平台前端,所述机械臂包括底座固定座、第一机械臂、第二机械臂、第三机械臂、第四机械臂以及机械臂伺服电机;
[0024]
所述竹子固定装置设置于所述机械臂末端,所述竹子固定装置包括伐竹系统第一伺服电机、竹子固定爪,所述竹子固定爪与固定轴转动连接,所述竹子固定装置包括上下两个伐竹系统第一伺服电机,两个伐竹系统第一伺服电机转子分别套有两个齿轮,所述齿轮与所述竹子固定爪内侧啮合,从而通过两个伐竹系统第一伺服电机不同方向旋转来控制所述竹子固定爪固定竹子;
[0025]
所述伐竹装置设置于所述竹子固定装置下方,所述伐竹装置还包括伐竹系统第二伺服电机、伐竹刀片伺服电机、刀片承载架、伐竹刀片,两个所述伐竹刀片承载架分别朝相反方向呈15
ꢀ°
倾斜,且所述伐竹刀片与所述刀片承载架保持180
°
,所述伐竹刀片伺服电机设置在所述刀片承载架中,一个所述刀片承载架上置有两个所述伐竹刀片伺服电机,靠近外端的所述伐竹刀片伺服电机连接有一个大尺寸以及一个小尺寸伐竹刀片,大尺寸的伐竹刀片置于小尺寸的伐竹刀片的上端,靠近内侧的所述伐竹刀片伺服电机连接有一个所述伐竹刀片,所述伐竹刀片的数量为6;
[0026]
所述竹子测距装置设置于所述伐竹装置下方,所述竹子测距装置包括一个realsense d435i深度相机和镜头防尘装置,所述realsense d435i深度相机设置于所述镜头防尘装置内,防尘装置外壳两侧对称固定有防尘板升降机构;所述防尘板升降机构包括防尘伺服电机、齿轮杆、伺服电机“p型”固定卡座、清洁履带固定架、清洁履带、防尘板,所述防尘板的两侧固定于所述清洁履带的内侧,所述清洁履带下方与所述齿轮杆相连,所述齿轮杆外嵌套于所述防尘伺服电机的转子,所述防尘伺服电机与所述伺服电机“p型”固定卡座连接,所述伺服电机“p型”固定卡座设置于所述防尘装置外壳两侧,所述清洁履带上方与所述清洁履带固定架连接,所述清洁履带固定架固定于所述防尘装置外壳两侧。
[0027]
优选地,所述第一温度监控模块包括第一lora通信模块、第一温度传感器;
[0028]
所述第一lora通信模块安装于所述火焰测距装置后方;
[0029]
所述第一温度传感器分别安装于锂电池、工控机以及所述第一测距模块中的microsoft kinect v2深度相机底部。
[0030]
优选地,所述第二温度监控模块包括第二lora通信模块、第二温度传感器以及风冷装置;
[0031]
所述第二lora通信模块固定于所述大型履带智能移动平台上方;
[0032]
所述第二温度传感器分别安装于锂电池、所述第二测距模块内以及所述第二控制模块内;
[0033]
所述风冷装置设置于大型履带智能移动装置前方。
[0034]
优选地,所述灭火模块包括大口径高压水枪、小口径高压水枪、侧面水箱以及主水箱;
[0035]
所述大口径高压水枪数量为1,设置于大型智能履带移动平台前端中央,所述小口径高压水枪数量为2,分别设置于所述大型智能履带移动平台两侧;
[0036]
所述主水箱位于大型智能履带移动平台顶端,其内置水泵,前后端接有软管,前端软管与大口径高压水枪相连,由内置水泵为所述大口径高压水枪供水;
[0037]
所述小口径水枪分别设置于大型智能履带移动平台两侧。
[0038]
优选地,所述相机防尘及除尘复合装置包括除尘装置和防尘装置;
[0039]
所述除尘装置,包括realsense d435i深度相机、相机第一清理外壳、相机第二清理外壳、玻璃罩、“f型”电机固定架、除尘板伺服电机、长齿轮杆、清洁履带、清洁海绵;
[0040]
所述realsense d435i深度相机外部设置有所述相机第一清理外壳,所述玻璃罩设置于所述相机第二清理外壳前方,所述相机第一清理外壳上方设置有两个“f型”电机固定架,两个除尘伺服电机分别设置于两个“f型”电机固定架,所述除尘伺服电机转子套有所述长齿轮杆,所述长齿轮杆的两端分别套有两个所述清洁履带,所述清洁海绵设置于所述清洁履带的一端,所述清洁海绵与所述玻璃罩接触,通过所述清洁履带运动带动所述清洁海绵在所述玻璃罩上左右移动,用于清理所述玻璃罩;
[0041]
所述防尘装置,包括防尘装置外壳、防尘板升降机构,所述防尘装置外壳设置于所述相机清理外壳,所述相机第一清理外壳设置于相机第二清理外壳外围,所述防尘装置外壳两侧设置有所述防尘板升降机构。
[0042]
优选地,所述防尘板升降机构包括除尘板伺服电机、相机清理外壳、短齿轮杆、“p型”电机固定架、防尘履带固定架、防尘履带、防尘板;
[0043]
所述防尘板两侧固定于所述防尘履带的内侧;
[0044]
所述短齿轮杆设置于所述防尘履带下方;
[0045]
所述短齿轮杆外嵌套于所述除尘板伺服电机;
[0046]
所述除尘板伺服电机设置于所述“p型”电机固定架,所述“p型”电机固定架设置于所述防尘装置外壳两侧;
[0047]
所述防尘履带上方与所述防尘履带固定架可转动相连,所述防尘履带固定架设置于所述防尘装置外壳两侧。
[0048]
优选地,所述第二测距模块包括前方引路装置、灭火测距装置、两侧火焰测距装
置;
[0049]
所述前方引路装置,包括一个realsense d435i深度相机和所述相机防尘装置,设置于所述大型履带智能移动平台前方;
[0050]
所述灭火测距装置,包括一个microsoft kinect v2深度相机和所述相机防尘及除尘复合装置,设置于大口径高压水枪上方;
[0051]
所述两侧火焰测距装置,包括左侧火焰测距装置和右侧火焰测距装置,分别包括一个microsoft kinect v2深度相机和所述相机防尘及除尘复合装置。
[0052]
本实用新型实施例的另一目的在于提供一种隔离带制作机器人,所述隔离带制作机器人用于竹子的定向砍伐以制作防火隔离带,包括定向伐竹模块、小型履带智能移动平台、第一测距模块、相机除尘装置、第一温度监控模块、第一电池模块以及第一控制模块;
[0053]
所述定向伐竹模块设置于所述小型履带智能移动平台上,用于砍伐竹子并使竹子倒向指定方向;
[0054]
所述小型履带智能移动平台用于驱动所述隔离带制作机器人在竹林中移动;
[0055]
所述第一测距模块用于测量周边火焰到所述隔离带制作机器人的距离,所述第一测距模块包括火焰测距装置和前方测距装置;所述火焰测距装置和前方测距装置均包括microsoft kinect v2深度相机以及所述相机除尘装置;所述前方测距装置安装于所述小型履带智能移动平台底部;
[0056]
所述相机除尘装置设置于所述第一测距模块上,用于对深度相机镜头进行清洁;
[0057]
所述第一温度监控模块用于监测所述第一测距模块、第一电池模块的温度并将信息反馈至所述第一控制模块;
[0058]
所述第一电池模块用于为所述隔离带制作机器人中的各个模块供电;
[0059]
所述第一控制模块分别与所述定向伐竹模块、所述小型履带智能移动平台、所述第一测距模块、所述相机除尘装置以及所述第一温度监控模块电气连接,用于接收并处理所述测距模块传输的图像数据,以控制所述小型履带智能移动平台移动,并控制所述定向伐竹模块砍伐竹子。
[0060]
本实用新型实施例的另一目的在于提供一种灭火机器人,所述灭火机器人包括大型履带智能移动平台、灭火模块、相机防尘及除尘复合装置、第二温度监控模块、第二测距模块、第二控制模块、第二电池模块;
[0061]
所述大型履带智能移动平台用于驱动所述灭火机器人在竹林中移动,平台内设置有运输腔,用于放置所述隔离带制作机器人以将其运抵火灾现场;
[0062]
所述灭火模块用于扑灭竹林中的火灾;
[0063]
所述相机防尘及除尘复合装置用于对深度相机镜头进行清洁;
[0064]
所述第二温度监控模块用于监控灭火机器人各个模块的温度并反馈至所述第二控制模块;
[0065]
所述第二测距模块用于测量灭火机器人到火焰的距离、测量所述灭火机构到火焰的距离以及测量所述隔离带制作机器人的方位;
[0066]
所述第二电池模块用于为所述灭火机器人的各个模块供电。
[0067]
本实用新型实施例提供的竹林灭火系统通过隔离带制作机器人的伐竹可以避免灭火机器人在前进过程中受到竹子的干扰,通过灭火机器人的灭火可以避免火焰对隔离带
8、清洁履带;1-3-9、第一温度传感器一;1-3-10、相机清洁伺服电机;1-3-11、相机外壳; 1-4、第一lora通信模块;1-5、第一电池模块;1-5-1、风冷降温风扇;1-5-2、电池降温风扇外壳;1-5-3、第一锂电池;1-5-4、第一温度传感器二;1-6、前方测距装置;1-7、小车行走履带;1-7-1、前主动轮;1-7-2、后主动轮;1-7-3、从动轮; 1-7-4、履带;1-7-5、小型履带伺服电机;1-7-6、轴承;1-8、小型履带智能移动平台;1-9、定向伐竹模块;1-9-1、伐竹系统第一伺服电机;1-9-2、伐竹系统第一伺服电机转子轴套;1-9-3、竹子固定爪;1-9-4、固定轴;1-9-5、第二固定轴;1-9-6、伐竹系统第二伺服电机;1-9-7、伐竹系统第二伺服电机转子轴套;1-9-8、第三固定轴;1-9-9、大尺寸伐竹刀片;1-9-10、小尺寸伐竹刀片;1-9-11、伐竹刀片伺服电机;1-9-12、刀片承载架;1-10、竹子测距装置;1-10-1、防尘装置外壳;1-10-2、realsense d435i深度相机;1-10-3、防尘板;1-10-4、防尘伺服电机;1-10-5、清洁履带固定架;1-10-6、“p型”固定卡座;1-10-7、齿轮杆;1-10-8、清洁履带;1-11、第一控制模块;2、灭火机器人;2-1、主水箱;2-2、侧面水箱;2-3、大型履带智能移动平台;2-3-1、转向轮;2-3-2、转向电机;2-4、大口径高压水枪;2-4-1、灭火测距装置;2-4-2、高压水枪;2-4-3、大口径高压水枪伺服电机;2-4-4、水枪底座;2-4-5、底座伺服电机;2-4-6、接水口;2-4-1-1、相机第一清理外壳;2-4-1-2、相机第二清理外壳;2-4-1-3、玻璃罩;2-4-1-4、realsense d435i深度相机;2-4-1-5、防尘板固定板;2-4-1-6、清洁海绵;2-4-1-7、“f型”电机固定架;2-4-1-8、除尘伺服电机;2-4-1-9、长齿轮杆;2-4-1-10、防尘履带固定架;2-4-1-11、“p型”电机固定架;2-4-1-12、除尘板伺服电机;2-4-1-13、防尘板;2-4-1-14、清洁履带;2-4-1-15、防尘履带;2-4-1-16、短齿轮杆; 2-5、小口径高压水枪;2-5-1、左侧小口径高压水枪;2-5-2、右侧小口径高压水枪;2-5-3、右侧火焰测距装置;2-5-4、左侧火焰测距装置;2-6、第二控制模块;2-6-1、风冷模块;2-6-2、第二温度传感器一;2-6-3、工控机; 2-7、前方引路装置;2-8、第二电池模块;2-8-1、水冷模块;2-8-2、第二锂电池;2-8-3、第二温度传感器二;2-8-4、通水水管;2-9、第二lora通信模块。
具体实施方式
[0092]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0093]
以下结合具体实施例对本实用新型的具体实现进行详细描述。
[0094]
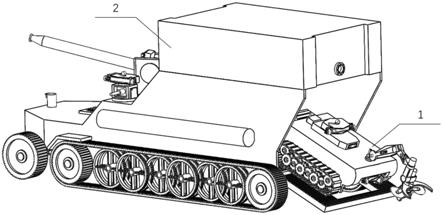
如图1、23所示,为本实用新型实施例提供的一种竹林灭火系统的结构图,包括隔离带制作机器人1和灭火机器人2;
[0095]
所述隔离带制作机器人1用于竹子的定向砍伐以制作防火隔离带,包括定向伐竹模块1-9、小型履带智能移动平台1-8、第一测距模块、相机除尘装置、第一温度监控模块、第一电池模块1.5以及第一控制模块1-11;
[0096]
所述定向伐竹模块1-9设置于所述小型履带智能移动平台1-8上,用于砍伐竹子并使竹子倒向指定方向;
[0097]
所述小型履带智能移动平台1-8用于驱动所述隔离带制作机器人1在竹林中移动;
[0098]
所述第一测距模块用于测量周边火焰到所述隔离带制作机器人1的距离,所述第一测距模块包括火焰测距装置1-3和前方测距装置1-6;所述火焰测距装置1-3和前方测距
装置1-6均包括microsoft kinect v2深度相机1-3-1以及所述相机除尘装置;所述前方测距装置1-6安装于所述小型履带智能移动平台1-8底部;
[0099]
所述相机除尘装置设置于所述第一测距模块上,用于对深度相机镜头进行清洁;
[0100]
所述第一温度监控模块用于监测所述第一测距模块、第一电池模块1-5的温度并将信息反馈至所述第一控制模块1-11;
[0101]
所述第一电池模块1-5用于为所述隔离带制作机器人1中的各个模块供电;
[0102]
所述第一控制模块1-11分别与所述定向伐竹模块1-9、所述小型履带智能移动平台1-8、所述第一测距模块、所述相机除尘装置以及所述第一温度监控模块电气连接,用于接收并处理所述测距模块传输的图像数据,以控制所述小型履带智能移动平台1-8移动,并控制所述定向伐竹模块1-9砍伐竹子;
[0103]
所述灭火机器人2包括大型履带智能移动平台2-3、灭火模块、相机防尘及除尘复合装置、第二温度监控模块、第二测距模块、第二控制模块2-6、第二电池模块2-8;
[0104]
所述大型履带智能移动平台2-3用于驱动所述灭火机器人2在竹林中移动,平台内设置有运输腔,用于放置所述隔离带制作机器人1以将其运抵火灾现场;
[0105]
所述灭火模块用于扑灭竹林中的火灾;
[0106]
所述相机防尘及除尘复合装置用于对深度相机镜头进行清洁;
[0107]
所述第二温度监控模块用于监控灭火机器人2各个模块的温度并反馈至所述第二控制模块;
[0108]
所述第二测距模块用于测量灭火机器人2到火焰的距离、测量所述灭火机构到火焰的距离以及测量所述隔离带制作机器人1的方位;
[0109]
所述第二电池模块2-8用于为所述灭火机器人2的各个模块供电。
[0110]
在本实用新型实施列中,隔离带的作用包括隔离火场以及作为灭火机器人2的前进路线。制作隔离带的方式是砍伐竹子并使竹子倒向隔离带的侧面,以免倒下的竹子阻碍隔离带制作机器人1以及灭火机器人2的前进。在本实用新型实施例中,隔离带制作机器人1可以是通过人工操作控制,也可以采用自动化的程序控制,例如采集前进路线的图像并对图像进行分析处理,从而得出前进控制路线。以上两种为可选的具体实现方式,本实用新型实施例对于具体的控制方式不作限定,本实用新型的保护要点在于隔离带制作机器人1与灭火机器人2组成的系统本身。在本实用新型实施例中,隔离带制作机器人1上还可以设置补光模块1-2,用于照明。
[0111]
在本实用新型实施例中,小型履带智能移动平台1-8的具体结构可以是:小车行走履带1-7以伺服电机为转动轴转动连接,所述小车行走履带1-7包括前主动轮1-7-1和后主动轮1-7-2,小型履带伺服电机1-7-5由第一控制模块1-11、火焰测距装置1-3以及前方测距装置1-6综合控制,带动主动轮旋转,主动轮1-7-1和1-7-2同方向旋转带动履带1-7-4旋转,履带1-7-4传递动能给从动轮1-7-3,带动从动轮1-7-3旋转,从动轮1-7-3通过轴承1-7-6与小型履带智能移动平台1-8连接。
[0112]
在本实用新型实施例中,所述火焰测距装置1-3以及前方测距装置1-6都包括microsoft kinect v2深度相机以及相机除尘机构,二者不同之处在于火焰测距装置1-3设置于小型履带智能移动平台1-8上端,而前方测距装置1-6设置于小型履带智能移动平台1-8底端;相机除尘机构包括玻璃板1-3-2、电机固定架1-3-3、鼓风机1-3-4、吸尘器1-3-5、吸
尘器出风口1-3-6、齿轮杆1-3-7、清洁履带1-3-8、第一温度传感器1-3-9、相机清洁伺服电机1-3-10、相机外壳1-3-11;相机外壳1-3-11设置于microsoft kinect v2深度相机1-3-1外侧,玻璃板1-3-2设置于microsoft kinect v2深度相机1-3-1前端,同时玻璃板1-3-2嵌于相机外壳1-3-11前端,鼓风机1-3-4设置于相机外壳1-3-11两端,吸尘器1-3-5接触于玻璃板1-3-2,吸尘器出风口1-3-6设置于相机外壳1-3-11上端,并且吸尘器1-3-5与吸尘器出风口1-3-6之间由软管连接,电机固定架1-3-3设置于相机外壳1-3-11上端的两侧,相机清洁伺服电机1-3-10设置于电机固定架1-3-3之下,其中相机清洁伺服电机1-3-10的转子部分由齿轮杆1-3-7包裹,两个齿轮杆1-3-7分别与清洁履带1-3-8的两端转动连接,清洁履带1-3-8包括上下两个履带,两个履带分别与吸尘器1-3-5上下两端相连,第一温度传感器一1-3-9置于相机外壳1-3-11内侧的底端。
[0113]
本实用新型实施例中,microsoft kinect v2深度相机1-3-1用于判断火焰的距离,玻璃板1-3-2用于挡灰,而鼓风机1-3-4用于向玻璃板1-3-2前端吹风实现空气对流,从而达到挡住扬灰的目的,吸尘器1-3-5以及吸尘器出风口1-3-6用于清除玻璃板1-3-2上的附着扬灰,相机清洁伺服电机1-3-10、齿轮杆1-3-7以及清洁履带1-3-8用于控制吸尘器1-3-5的移动,温度传感器1-3-9用于测量microsoft kinect v2深度相机1-3-1的温度。
[0114]
在本实用新型实施例中,定向伐竹模块1-9用于砍伐竹子并使竹子倒向指定方向,这里的指定方向具体是指隔离带的两侧的任意一侧,当然,也可以具体指定某一侧;小型履带智能移动平台1-8是采用履带驱动的移动平台,需要理解的是,在本实用新型实施例中,大小是相对的,这里的小是相对于灭火机器人2的大型履带智能移动平台2-3而言的,在本实用新型实施例中,由于灭火机器人2需要运载水箱,其体积和载重较伐竹机器人要大,此仅仅用于区别隔离带制作机器人1与灭火机器人2中相同功能的组件,并不用于具体限定隔离带制作机器人1与灭火机器人2的不同。第一测距模块用于测量火焰的距离,测量的方式采用深度相机识别。隔离带制作机器人1通过第一控制模块进行综合控制,优选地,第一控制模块1-11中还可以包括第一lora通信模块1-4,用于接受操作人员的远程无线控制,此为可选的具体实现方式。可选地,第一lora通信模块1-4安装于所述火焰测距装置1-3后方。在本实用新型实施例中,第一lora通信模块1-4还可以用于与灭火机器人2进行通信,以实现灭火机器人2与隔离带制作机器人1的跟随以及使灭火机器人2为隔离带制作机器人1进行灭火。
[0115]
在本实用新型实施例中,火焰测距装置1-3用于测量火焰的距离,前方测距装置1-6用于判断与前进路线上竹子以及障碍物的距离。在本实用新型实施例中,火焰测距装置1-3和前方测距装置1-6主要由深度相机以及相机除尘装置组成,通过深度相机采集图像并对图像进行处理以输出相应的距离信息。
[0116]
在本实用新型实施例中,灭火机器人2通过跟随隔离带制作机器人1的方式前进,此外,还可以将隔离带制作机器人1运抵火场,其上设置有运输腔,可以容纳隔离带制作机器人1。与隔离带制作机器人1相似,灭火机器人2可以通过操作人员的运程操作进行控制,也可以通过预设的程序实现完全自动或者半自动化控制,此为可选的具体实现方式,本实用新型的要点于隔离带制作机器人1与灭火机器人2组成的系统,对于其控制方法不作具体限定。
[0117]
在本实用新型实施例中,灭火模块用于对火焰进行扑灭,在本实用新型实施例中,
9-11连接有一个大尺寸伐竹刀片1-9-9以及一个小尺寸伐竹刀片1-9-10,大尺寸的伐竹刀片1-9-9置于小尺寸的伐竹刀片1-9-10的上端,内侧的所述伐竹刀片伺服电机1-9-11连接有一个所述伐竹刀片,所述伐竹刀片的数量为6;
[0126]
所述竹子测距装置1-10设置于所述伐竹装置下方,所述竹子测距装置1-10包括一个realsense d435i深度相机1-10-2和镜头防尘装置,所述realsense d435i深度相机1-10-2设置于所述镜头防尘装置内,防尘装置外壳1-10-1两侧对称固定有防尘板升降机构;所述防尘板升降机构包括防尘伺服电机1-10-4、齿轮杆1-10-7、“p型”固定卡座1-10-6、清洁履带固定架1-10-5、清洁履带1-10-8、防尘板1-10-3,所述防尘板1-10-3的两侧固定于所述清洁履带1-10-8的内侧,所述清洁履带1-10-8下方与所述齿轮杆1-10-7相连,所述齿轮杆1-10-7外嵌套于所述防尘伺服电机1-10-4的转子,所述防尘伺服电机1-10-4与所述“p型”固定卡座1-10-6连接,所述“p型”固定卡座1-10-6设置于所述防尘装置外壳1-10-1两侧,所述清洁履带1-10-8上方与所述清洁履带固定架1-10-5连接,所述清洁履带固定架1-10-5固定于所述防尘装置外壳1-10-1两侧。
[0127]
在本实用新型实施例中,定向伐竹模块1-9通过机械臂1-1可以多角度多方向运动,从而将竹子固定装置与伐竹装置伸到竹子的切断位置。竹子固定装置用于在伐竹过程中对竹子进行固定,防止竹子在伐断后立即倒下,通过竹子固定装置还可以使伐断后的竹子倒向指定的方向,以形成隔离带,便于隔离带制作机器人1和灭火机器人2的行进。在本实用新型实施例中,竹子测距装置1-10用于测量竹子的距离,这里的距离既包括隔离带制作机器人1与竹子的距离,又包括竹子与竹子之间的距离,通过竹子测距装置1-10可以确定伐竹时机械臂1-1的运动路线以及伐竹的先后顺序,当然,伐竹过程的控制也可以由操作都远程进行操作,本实用新型实施例对此不作具体限定。在本实用新型实施例中,用于驱动机械臂1-1的机械臂伺服电机包括第一伺服电机1-1-2、第二伺服电机1-1-3、第三伺服电机1-1-4、第四伺服电机1-1-5、第五伺服电机1-1-6,分别用于驱动第一机械臂1-1-7、第二机械臂1-1-8、第三机械臂1-1-9以及第四机械臂1-1-10。
[0128]
本实用新型实施例提供的竹林灭火系统中隔离带制作机器人1通过定向伐竹模块可以对竹子进行定向砍伐,从而制作出隔离带,使隔离带制作机器人1以及灭火机器人2都能处在一个相对远离火焰的位置,且可以有效的防止火势的蔓延。
[0129]
在本实用新型的一个实施例中,所述第一温度监控模块包括第一温度传感器,第一温度传感器分别安装于第一锂电池1-5-3、第一控制模块1-11以及所述第一测距模块中的microsoft kinect v2深度相机1-3-1底部。
[0130]
所述第一电池模块1-5设置于所述小型履带智能移动平台1-8后方,电池降温风扇外壳1-5-2设置于小型履带智能移动平台1-8后方,锂电池1-5-3设置于电池降温风扇外壳1-5-2内侧,风冷降温风扇1-5-1设置于电池降温风扇外壳1-5-2外侧,第一温度传感器二1-5-4设置于锂电池1-5-3底端。
[0131]
本实用新型实施例中,风冷降温风扇1-5-1用于使锂电池1-5-3降温,锂电池1-5-3用于给所述隔离带制作机器人机构1中的所有模块供电,第一温度传感器二1-5-4用于测量锂电池1-5-3的温度。在本实用新型实施例中,第一温度传感器一1-3-9设置于第一测距模块中的microsoft kinect v2深度相机1-3-1底部。
[0132]
本实用新型实施例中,锂电池1-5-3本实用新型设计为2个,第一温度传感器本实
用新型设计为6个。
[0133]
本实用新型实施例通过安装第一温度传感器可以监控各部件的运行过程中的温度变化。需要理解的是,在本实用新型实施例中,各部件的温度既可能是由于设备运行本身产生的温度变化,也可能是由于身处火场受到火焰的辐射产生的温度变化,总之通过第一温度传感器可以监测各部件的温度,以及时进行冷却,保证各部件的正常运行。
[0134]
本实用新型实施例提供的竹林灭火系统中隔离带制作机器人1通过设置第一温度监控模块可以对各部件的温度进行监测,以保证各部件的正常运行。
[0135]
在本实用新型的一个实施例中,所述第二温度监控模块包括第二温度传感器、风冷装置2-6-1以及水冷装置2-8-1;
[0136]
所述第二温度传感器分别安装于第二锂电池2-8-2、所述第二测距模块内以及所述第二控制模块2-6内;
[0137]
所述风冷装置2-6-1设置于大型履带智能移动平台2-3前方,用于对所述设置于大型履带智能移动平台2-3内部的第二控制装置2-6进行冷却;
[0138]
所述水冷装置2-8-1用于对所述锂电池2-8-2进行冷却。
[0139]
本实用新型实施例通过安装第二温度传感器可以监控各部件的运行过程中的温度变化。需要理解的是,在本实用新型实施例中,各部件的温度既可能是由于设备运行本身产生的温度变化,也可能是由于身处火场受到火焰的辐射产生的温度变化,总之通过第二温度传感器可以监测各部件的温度,以及时进行冷却,保证各部件的正常运行。需要理解的是,风冷装置2-6-1设置于大型履带智能移动平台2-6-1前方,通过向灭火机器人2内部的安装腔内吹入空气实现对第二控制模块2-6的冷却。在本实用新型中,第二温度传感器包括用于监测第二控制模块2-6的第二温度传感器一2-6-2以及用于监测第二电池模块2-8的第二温度传感器二2-8-3。
[0140]
在本实用新型实施例中,所述第二电池模块2-8设置于大型履带智能移动平台2-3内侧,所述第二电池模块2-8包括水冷模块2-8-1、锂电池2-8-2、第二温度传感器二2-8-3和通水水管2-8-4,锂电池2-8-2设置于大型履带智能移动平台2-3内侧,第二温度传感器二2-8-3设置于大型履带智能移动平台2-3外侧并且其测量部分与锂电池2-8-2接触,水冷模块2-8-1设置于大型履带智能移动平台2-3外侧并与锂电池2-8-2接触,通水水管2-8-4设置于水冷模块2-8-1两端并与侧面水箱2-2连通。
[0141]
本实用新型实施例提供的竹林灭火系统中灭火机器人2通过设置第二温度监控模块可以对各部件的温度进行监测,以保证各部件的正常运行。
[0142]
在本实用新型的一个实施例中,所述灭火模块包括大口径高压水枪2-4、小口径高压水枪2-5、侧面水箱2-2以及主水箱2-1;
[0143]
所述大口径高压水枪2-4数量为1,设置于大型智能履带移动平台2-3前端中央,所述小口径高压水枪数量为2,分别设置于所述大型智能履带移动平台2-3两侧;
[0144]
所述主水箱2-1位于大型智能履带移动平台2-3顶端,其内置水泵,前后端接有软管,前端软管与大口径高压水枪2-4相连,由内置水泵为所述大口径高压水枪2-4供水;
[0145]
所述小口径高压水枪2-5分别设置于大型智能履带移动平台2-3两侧。
[0146]
在本实用新型实施例中,大口径高压水枪2-4用于对竹林进行灭火,而小口径高压水枪2-5用于防止火蔓延到灭火机器人2周边。在本实用新型实施例中,大口径高压水枪2-4
以及小口径高压水枪2-5均包括两个自由度,可以在水平方向转动,还可以沿竖直方向转动,以实现对不同位置的火焰的喷灭。小口径高压水枪2-5包括左侧小口径高压水枪2-5-1以及右侧小口径高压水枪2-5-2。
[0147]
在本实用新型实施例中,大口径高压水枪2-4设置于大型履带智能移动平台2-3中间,所述大口径高压水枪2-4包括灭火测距装置2-4-1、高压水枪2-4-2、大口径高压水枪伺服电机2-4-3、水枪底座2-4-4;水枪底座2-4-4设置于大型履带智能移动平台2-3中间,高压水枪2-4-2与水枪底座2-4-4通过大口径高压水枪伺服电机2-4-3转动连接,灭火测距装置2-4-1设置于高压水枪2-4-2上方,底座伺服电机2-4-5设置于水枪底座2-4-4,接水口2-4-6与水箱出水口2-12之间用软管连接。
[0148]
在本实用新型实施例中,大口径高压水枪2-4以及小口径高压水枪2-5均通过水管与水泵相连,水泵设置于水箱内,包括侧面水箱2-2以及设置于顶部的主水箱2-1。
[0149]
本实用新型实施例提供的竹林灭火系统中灭火机器人2通过设置大口径高压水枪2-3以及小口径高压水枪2-4,既可以对较远处的火焰进行喷灭,又可以防止火焰蔓延到灭火机器人2周边,从而可保证系统的安全,提高系统的可靠性。
[0150]
在本实用新型的一个实施例中,所述相机防尘及除尘复合装置包括除尘装置和防尘装置;
[0151]
所述除尘装置,包括realsense d435i深度相机2-4-1-4、相机第一清理外壳2-4-1-1、相机第二清理外壳2-4-1-2、玻璃罩2-4-1-3、“f型”电机固定架2-4-1-7、除尘伺服电机2-4-1-8、长齿轮杆2-4-1-9、清洁履带2-4-1-14、清洁海绵2-4-1-6;
[0152]
所述realsense d435i深度相机2-4-1-4外部设置有所述相机第一清理外壳2-4-1-1,所述玻璃罩2-4-1-3设置于所述相机第二清理外壳2-4-1-2前方,所述相机第一清理外壳2-4-1-1上方设置有两个“f型”电机固定架2-4-1-7,两个除尘伺服电机2-4-1-8分别设置于两个“f型”电机固定架2-4-1-7,所述除尘伺服电机2-4-1-8转子套有所述长齿轮杆2-4-1-9,所述长齿轮杆2-4-1-9的两端分别套有两个所述清洁履带2-4-1-14,所述清洁海绵2-4-1-6设置于所述清洁履带2-4-1-14的一端,所述清洁海绵2-4-1-6与所述玻璃罩2-4-1-3接触,通过所述清洁履带2-4-1-14运动带动所述清洁海绵2-4-1-6在所述玻璃罩2-4-1-3上左右移动,用于清理所述玻璃罩2-4-1-3;
[0153]
所述防尘装置,包括防尘装置外壳、防尘板升降机构,所述防尘装置外壳设置于所述相机第一清理外壳2-4-1-1上,所述相机第一清理外壳2-4-1-1设置于相机第二清理外壳2-4-1-2外围,所述防尘装置外壳两侧设置有所述防尘板升降机构。
[0154]
在本实用新型实施例中,除尘装置可以对落到玻璃罩上的灰尘进行清理,以保持相机视野的清晰。此外,还设置有防尘装置,防尘装置通过防尘板的打开和关闭使玻璃罩在不使用时受免灰尘的影响,其作用是在相机不使用时保护玻璃罩。
[0155]
在本实用新型实施例中,防尘板固定板2-4-1-5设置于相机清理外壳2-4-1-1前端,防尘板2-4-1-13设置于防尘板固定板2-4-1-5内侧,“p型”电机固定架2-4-1-11设置于相机清理外壳2-4-1-1两侧底端,履带固定架2-4-1-10设置于相机清理外壳2-4-1-1两侧,除尘板伺服电机2-4-1-12设置于“p型”电机固定架2-4-1-11,短齿轮杆2-4-1-16设置于除尘板伺服电机2-4-1-12转子部分并保持转动连接,防尘履带2-4-1-15两端分别与短齿轮杆2-4-1-16与履带固定架2-4-1-10转动连接,防尘履带2-4-1-15内侧与防尘板2-4-1-13连
接。
[0156]
本实用新型实施例提供的竹林灭火系统中的灭火机器人2通过设置相机防尘及除尘复合装置可以保持相机视野的清晰,提高采集到的图像的质量,便于对图像进行分析处理,以获取准确的位置信息。
[0157]
在本实用新型的一个实施例中,所述防尘板升降机构包括防尘伺服电机、相机清理外壳、短齿轮杆2-4-1-16、伺服电机“p型”固定卡座、防尘履带固定架2-4-1-10、防尘履带2-4-1-15、防尘板2-4-1-13;
[0158]
所述防尘板2-4-1-13两侧固定于所述防尘履带2-4-1-15的内侧;
[0159]
所述短齿轮杆2-4-1-16设置于所述防尘履带2-4-1-15下方;
[0160]
所述短齿轮杆2-4-1-16外嵌套于所述除尘板伺服电机;
[0161]
所述除尘板伺服电机设置于所述伺服电机“p型”固定卡座,所述伺服电机“p型”固定卡座设置于所述防尘装置外壳两侧;
[0162]
所述防尘履带2-4-1-15上方与所述防尘履带固定架2-4-1-10可转动相连,所述防尘履带固定架2-4-1-10设置于所述防尘装置外壳两侧。
[0163]
在本实用新型的一个实施例中,所述第二测距模块包括前方引路装置2-7、灭火测距装置、两侧火焰测距装置;
[0164]
所述前方引路装置2-7,包括一个realsense d435i深度相机2-4-1-4和所述相机防尘装置,设置于所述大型履带智能移动平台2-3前方;
[0165]
所述灭火测距装置,包括一个microsoft kinect v2深度相机和所述相机防尘及除尘复合装置,设置于大口径高压水枪2-4上方,;
[0166]
所述两侧火焰测距装置,包括左侧火焰测距装置2-5-3和右侧火焰测距装置2-5-4,分别包括一个microsoft kinect v2深度相机和所述相机防尘及除尘复合装置。
[0167]
在本实用新型实例中,前方引路装置2-7用于测量与前方障碍物的距离并引导大型履带智能移动平台2-3前进,同时锁定小型履带智能移动平台1-8,控制大型履带智能移动平台2-3跟随小型履带智能移动平台1-8,由于小型履带智能移动平台上设置了所述定向伐竹模块1-9,所以大型履带智能移动平台2-3跟随小型履带智能移动平台1-8可以更好的移动。
[0168]
如图4所示,本实用新型实施例还提供的一种隔离带制作机器人1,所述隔离带制作机器人1用于竹子的定向砍伐以制作防火隔离带,包括定向伐竹模块、小型履带智能移动平台、第一测距模块、相机除尘装置、第一温度监控模块、第一电池模块以及第一控制模块;
[0169]
所述定向伐竹模块设置于所述小型履带智能移动平台上,用于砍伐竹子并使竹子倒向指定方向;
[0170]
所述小型履带智能移动平台用于驱动所述隔离带制作机器人1在竹林中移动;
[0171]
所述第一测距模块用于测量周边火焰到所述隔离带制作机器人1的距离,所述第一测距模块包括火焰测距装置和前方测距装置;所述火焰测距装置和前方测距装置均包括microsoft kinect v2深度相机以及所述相机除尘装置;所述前方测距装置安装于所述小型履带智能移动平台底部;
[0172]
所述相机除尘装置设置于所述第一测距模块上,用于对深度相机镜头进行清洁;
[0173]
所述第一温度监控模块用于监测所述第一测距模块、第一电池模块的温度并将信
息反馈至所述第一控制模块;
[0174]
所述第一电池模块用于为所述隔离带制作机器人1中的各个模块供电;
[0175]
所述第一控制模块分别与所述定向伐竹模块、所述小型履带智能移动平台、所述第一测距模块、所述相机除尘装置以及所述第一温度监控模块电气连接,用于接收并处理所述测距模块传输的图像数据,以控制所述小型履带智能移动平台移动,并控制所述定向伐竹模块砍伐竹子。
[0176]
在本实用新型实施例中,隔离带制作机器人1的具体结构以及连接关系参考前述任意一个或者多个实施例的组合,对于其具体的结构以及连接关系本实施例不再赘述。
[0177]
本实用新型实施例提供的隔离带制作机器人1可以实现定向伐竹从而制作出隔离带,可以有效地对防止火焰对自身的影响,同时还可以防止火势的蔓延,与灭火机器人2配合,可以实现分工合作,提高系统的可靠性。
[0178]
如图5所示,本实用新型实施例还提供的一种灭火机器人2,所述灭火机器人2包括大型履带智能移动平台、灭火模块、相机防尘及除尘复合装置、第二温度监控模块、第二测距模块、第二控制模块、第二电池模块;
[0179]
所述大型履带智能移动平台用于驱动所述灭火机器人2在竹林中移动,平台内设置有运输腔,用于放置所述隔离带制作机器人1以将其运抵火灾现场;
[0180]
所述灭火模块用于扑灭竹林中的火灾;
[0181]
所述相机防尘及除尘复合装置用于对深度相机镜头进行清洁;
[0182]
所述第二温度监控模块用于监控灭火机器人2各个模块的温度并反馈至所述第二控制模块;
[0183]
所述第二测距模块用于测量灭火机器人2到火焰的距离以及测量所述灭火机构到火焰的距离以及测量所述隔离带制作机器人1的方位;
[0184]
所述第二电池模块用于为所述灭火机器人2的各个模块供电。
[0185]
在本实用新型实施例中,灭火机器人2的具体结构以及连接关系参考前述任意一个或者多个实施例的组合,对于其具体的结构以及连接关系本实施例不再赘述。
[0186]
本实用新型实施例提供的灭火机器人2可以实现近距离以及远距离的灭火,既有效地对防止火焰对自身的影响,又可以防止火势的蔓延,与隔离带制作机器人1配合,可以实现分工合作,提高系统的可靠性。
[0187]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1