泡沫比例混合装置的制作方法
1.本技术涉及消防安全技术领域,尤其涉及一种泡沫比例混合装置。
背景技术:
2.泡沫灭火系统是保障消防安全的重要设施,广泛应用于隧道、仓库、油库等建筑中,对于a类、b类、f类火灾的防范有针对性的作用。泡沫比例混合装置是泡沫灭火系统的核心构成部件。现有的压力式泡沫比例混合装置以文丘里管作为核心部件。当水泵正常抽水工作时,比例混合器通过文丘里管将泡沫液吸入消防管道与消防水进行混合。泡沫液和消防水经混合后通过喷射炮喷射出去进行消防作业。
技术实现要素:
3.本技术提供一种泡沫比例混合装置,其通过罗茨泵作为核心部件,通过简单、紧凑的结构即可实现泡沫和水比例混合的功能,同时使用方便,能够满足多种场合下的消防工作。
4.本技术一方面提供了一种泡沫比例混合装置,所述泡沫比例混合装置包括罗茨泵以及齿轮泵。所述罗茨泵包括罗茨泵壳体、罗茨泵入口和罗茨泵出口、一对转子和流体引导件。所述罗茨泵壳体内形成罗茨泵容腔。所述罗茨泵入口和所述罗茨泵出口分别设置在所述罗茨泵壳体上相对的两侧,且所述罗茨泵入口和所述罗茨泵出口分别与所述罗茨泵容腔相连通。所述一对转子位于所述罗茨泵容腔中。所述流体引导件设置在所述罗茨泵入口中,所述流体引导件被配置为引导流体流向所述一对转子并向所述一对转子提供彼此反向转动的驱动力。所述齿轮泵包括齿轮泵壳体和一对齿轮。所述齿轮泵壳体内形成齿轮泵容腔,所述齿轮泵壳体上相对的两侧分别设有齿轮泵入口和齿轮泵出口,所述齿轮泵出口与所述罗茨泵容腔流体连通。所述一对齿轮位于所述齿轮泵容腔中。其中,所述泡沫比例混合装置被配置为:所述罗茨泵的一对转子中的一个转子的转子轴与所述齿轮泵的一对齿轮中的一个齿轮的齿轮轴相连接,以通过所述一个转子带动所述一个齿轮转动。
5.如前文所述的泡沫比例混合装置,所述罗茨泵入口由所述罗茨泵壳体上的入口通道和连接在所述罗茨泵壳体外侧的罗茨泵入口管形成。
6.如前文所述的泡沫比例混合装置,所述罗茨泵还包括泡沫接收端口,所述泡沫接收端口设置在所述罗茨泵入口管上,所述泡沫接收端口与所述齿轮泵出口相连通,以将所述齿轮泵出口与所述罗茨泵容腔流体连通。
7.如前文所述的泡沫比例混合装置,所述泡沫比例混合装置还包括联轴器,所述联轴器连接在所述一个转子的转子轴与所述一个齿轮的齿轮轴之间,所述联轴器、所述转子轴和所述齿轮轴三者同轴设置,从而所述一个转子能够通过所述联轴器带动所述一个齿轮转动。
8.如前文所述的泡沫比例混合装置,所述罗茨泵壳体具有高度方向,所述一对罗茨泵转子的转子轴均沿所述高度方向延伸,所述流体引导件沿着所述罗茨泵壳体的高度方向
延伸。
9.如前文所述的泡沫比例混合装置,所述流体引导件包括一对流体引导面,所述一对流体引导面被配置为:当流体从所述罗茨泵入口流向所述罗茨泵容腔时,所述一对流体引导面引导所述流体形成两股支流,所述两股支流背离彼此流动,以分别驱使所述一对转子彼此反向转动。
10.如前文所述的泡沫比例混合装置,所述流体引导件大致呈三棱柱状,三棱柱状的所述引导件包括顶面、底面、在顶面和底面之间延伸的分流棱,以及连接在所述分流棱的相对两侧的一对侧面,所述一对侧面形成所述一对流体引导面;其中,所述的顶面和底面分别与所述罗茨泵入口的内壁相连接,所述分流棱背离所述罗茨泵容腔设置。
11.如前文所述的泡沫比例混合装置,三棱柱状的所述引导件还包括与所述分流棱相对的一个侧面,与分流棱相对的所述侧面与所述罗茨泵壳体在所述罗茨泵入口位置处的内壁相齐平;与所述分流棱相对的所述侧面的面积为a,所述罗茨泵入口在所述罗茨泵壳体的内壁位置处的开口面积为s,所述侧面面积a与所述开口面积s之间满足:1/4≤a:s≤3/4。
12.如前文所述的泡沫比例混合装置,三棱柱状的所述引导件的横截面为等腰三角形,所述一对流体引导面对应于所述等腰三角形的两腰,所述等腰三角形的底边的长度为b,所述等腰三角形的高为h,所述底边b与所述高h之间的比值h:b满足:1/3≤h:b≤1/2。
13.如前文所述的泡沫比例混合装置,所述齿轮泵入口被配置为接收泡沫液,所述齿轮泵被配置为将所述泡沫液从所述齿轮泵入口吸入并从所述齿轮泵出口排出;所述罗茨泵入口被配置为接收压力流体和来自所述齿轮泵出口的泡沫液,所述罗茨泵被配置为将从所述罗茨泵入口流入的所述压力流体和所述泡沫液在所述罗茨泵容腔内混合并从所述罗茨泵出口排出。
14.本技术将罗茨泵应用至泡沫比例混合装置中,利用罗茨泵体积小的特点使得泡沫比例混合装置具有紧凑的结构,以方便泡沫比例混合装置应用于各种不同的消防场合。同时,本技术在罗茨泵中增设流体引导件,利用流体引导件的导流作用使得罗茨泵仅在压力流体的动能作用下即可实现转子的正常转动,无需额外的附加动力。
附图说明
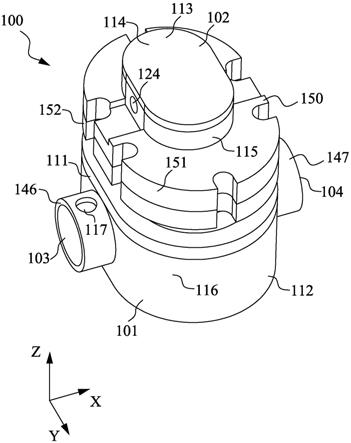
15.图1示出了本技术实施例的泡沫比例混合装置的结构。
16.图2a和图2b分别示出了图1中的泡沫比例混合装置在不同角度下的内部结构;
17.图3为图1中的齿轮泵在齿轮泵入口和齿轮泵出口位置处的横向剖视图;
18.图4为图1中的罗茨泵在罗茨泵入口和罗茨泵出口位置处的横向剖视图;
19.图5a和图5b分别示出了图1中的罗茨泵下壳体在不同角度下的内部结构;
20.图6a至图6e分别示出了图4中一对转子在一个运行周期下的工作状态;
21.图7a和图7b分别为图1中的泡沫比例混合装置在不同角度下的纵向剖视图。
具体实施方式
22.下面将参考构成本说明书一部分的附图对本技术的各种具体实施方式进行描述。应该理解的是,虽然在本技术中使用表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”等描述本技术的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明
的目的,基于附图中显示的示例方位而确定的。由于本技术所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制。
23.图1示出了本技术实施例的泡沫比例混合装置100的结构。如图1所示,泡沫比例混合装置100包括罗茨泵101和齿轮泵102。按照图1中所示出的x轴、y轴和z轴方向进行定位,齿轮泵102沿z轴方向位于罗茨泵101的上方。齿轮泵102能够从外部的泡沫液罐(图中未示出)中抽取泡沫液,并且能够将抽取到的泡沫液输送至罗茨泵。罗茨泵101能够同时接收来自外部的消防水以及来自齿轮泵102的泡沫液,并且将消防水与泡沫液相混合形成泡沫混合液。
24.齿轮泵102包括齿轮泵壳体113和一对齿轮207(参见图2a),其中一对齿轮207容纳在齿轮泵壳体113内。齿轮泵壳体113包括齿轮泵上盖114和齿轮泵下壳体115。齿轮泵壳体113在x轴方向上相对的两侧分别设有齿轮泵入口124和齿轮泵出口205(参见图2b)。在本技术实施例中,齿轮泵入口124和齿轮泵出口205均位于齿轮泵下壳体115上。其中,齿轮泵入口124用于与外部的泡沫液罐相连,以接收来自泡沫液罐中的泡沫液,齿轮泵出口205 用于排出泡沫液。
25.罗茨泵101包括同步齿轮外罩150、一对同步齿轮201(参见图2a和图2b)、罗茨泵壳体116、一对转子203(参见图2a和图2b)、罗茨泵入口管146和罗茨泵出口管147。其中一对转子203容纳在罗茨泵壳体116中。如图1所示,同步齿轮外罩150设置在齿轮泵壳体 113与罗茨泵壳体116之间,用于容纳一对同步齿轮201。同步齿轮外罩150包括同步齿轮上罩151和同步齿轮下罩152,其中同步齿轮上罩151与齿轮泵下壳体115相接触。同步齿轮上罩151和同步齿轮下罩152共同限定出一对同步齿轮201的容纳空间。
26.罗茨泵壳体116具有高度方向,如图1所示,罗茨泵壳体116的高度方向与z轴方向相一致。罗茨泵壳体116包括罗茨泵上盖111和罗茨泵下壳体112,罗茨泵上盖111与同步齿轮下罩152相接触。罗茨泵上盖111和罗茨泵下壳体112共同限定出一对同步齿轮201的容纳空间。罗茨泵入口管146和罗茨泵出口管147分别设置在罗茨泵壳体116上相对的两侧。在本技术实施例中,罗茨泵入口管146和罗茨泵出口管147均位于罗茨泵下壳体112上。罗茨泵入口管146和罗茨泵出口管147均为圆管,且均在x轴方向延伸。罗茨泵入口管146位于罗茨泵壳体116的左侧,其管口内形成有罗茨泵入口103,用于接收压力流体,以通过压力流体来驱动一对转子203的转动。在本技术的实施例中,压力流体为消防水。罗茨泵入口管 146能够通过外接的管道与外部的消防水供应端相连接(图中未示出),从而来自消防水供应端的消防水能够通过罗茨泵入口管146的管口进入罗茨泵入口103。罗茨泵入口管146上设有泡沫接收端口117。泡沫接收端口117位于罗茨泵入口管146的上表面,且贯穿罗茨泵入口管146的管壁,从而泡沫接收端口117与罗茨泵入口103相连通。泡沫接收端口117的横截面大致为圆形,能够通过外部的导管(图中未示出)与齿轮泵出口205相连通,从而泡沫接收端口117能够接收齿轮泵出口205排出的泡沫液。罗茨泵出口管147的管口内形成有罗茨泵出口104,罗茨泵出口104用于排放混合有泡沫液和消防水的泡沫混合水。由于罗茨泵入口管146和罗茨泵出口管147分别位于罗茨泵壳体116相对的两侧,因此,罗茨泵入口 103和罗茨泵出口104也分别位于罗茨泵壳体116相对的两侧。
27.图2a和图2b分别示出了图1中的泡沫比例混合装置100在不同角度下的内部结构。为了方便示出罗茨泵101和齿轮泵102的内部结构,图2a和图2b的泡沫比例混合装置100卸
除了其中的齿轮泵上盖114、同步齿轮外罩150以及罗茨泵上盖111。如图2a和2b所示,齿轮泵壳体113内形成齿轮泵容腔206,一对齿轮207互相啮合地设置在齿轮泵容腔206中。一对齿轮207的大小、形状相同,其中每个齿轮207的中心位置均设有一个齿轮轴217。两个齿轮轴217分别沿着z轴方向延伸,每个齿轮207均能绕其相应一个齿轮轴217转动。由于两个齿轮207互相啮合,因此,当其中一个齿轮207主动转动时,另一个齿轮207能够在其驱动下随之转动。齿轮泵容腔206的体积与一对齿轮207的大小相匹配,从而当一对齿轮 207在齿轮泵容腔206内啮合地转动时,齿轮泵102能够驱动泡沫液从齿轮泵入口124传输至齿轮泵出口205。
28.罗茨泵壳体116内形成罗茨泵容腔202,一对转子203设置在罗茨泵容腔202中。一对转子203的大小、形状相同,每个转子203的横截面大致呈“8”字形。每个转子203的中心位置均设有一个转子轴213。两个转子轴213分别沿着z轴方向延伸,分别构成相应一个转子203的旋转中心。罗茨泵容腔202的体积与一对转子203的大小相匹配,从而允许一对转子203能够分别绕其相应的转子轴213在罗茨泵容腔202中旋转。当具有一定流速的消防水从罗茨泵入口103流向一对转子203后,一对转子203能够在消防水的动能驱动下进行转动,以驱使罗茨泵101正常运行。在罗茨泵101正常运行的过程中,一对转子203具有相对固定的转动位置。然而,由于转子203的横截面大致呈“8”字形,一对转子203之间不设有互相啮合的齿或键,因此,一对转子203无法互相啮合定位,从而无法保证两个转子203在转动过程中的每个时刻都保持正确的相对位置。
29.为了保证罗茨泵101的正常运行,一对同步齿轮201沿z轴方向同轴地设置在一对转子 203的上方。也就是说,每个转子203的转子轴213的上方均设置有一个同步齿轮201,从而相应的一个转子203和一个同步齿轮201能够同步地旋转。如图2a和2b所示,一对同步齿轮201大小、形状相同,且在同一高度上啮合地设置。上述设置使得每个转子203均能够通过其相应的转子轴213带动相应一个同步齿轮201同步地旋转,同时一对同步齿轮201的啮合转动也会影响一对转子203的转动位置,保证一对转子203在转动过程中始终保持在正确的转动位置。在本技术实施例中,每个同步齿轮201的外周均设有多个细密的轮齿,细密轮齿的设置能够保证一对同步齿轮201稳定地啮合转动,从而在罗茨泵101运行过程中为一对转子201提供有效的位置引导。
30.图3为图1中的齿轮泵102在齿轮泵入口124和齿轮泵出口205位置处的横向剖视图,示出了齿轮泵102在x轴和y轴所限定的平面上的结构。如图3所示,齿轮泵容腔206的横截面由两条互相平行的直线侧边和两条相对设置的半圆弧线侧边共同限定。其中,两条平行直线侧边和两条半圆弧线侧边分别对应于齿轮泵容腔206的侧壁。两条互相平行的直线侧边包括左侧边304和右侧边305,左侧边304和右侧边305分别沿着y轴方向延伸。两条半圆的弧线侧边分别位于y轴方向的上下两侧,包括上侧边306和下侧边307,其中上侧边306 和下侧边307分别向外凸起设置。如图3所示,齿轮泵入口124位于左侧边304的中间位置,齿轮泵出口205位于右侧边305的中间位置。其中,齿轮泵入口124贯穿与左侧边304对应的齿轮泵壳体113侧壁,齿轮泵出口205贯穿与右侧边305对应的齿轮泵壳体113侧壁,从而齿轮泵入口124和齿轮泵出口205分别与齿轮泵容腔206流体连通。
31.一对齿轮207大小、形状相同,在y轴方向上上下并排地设置。本技术将设置在y轴上方的齿轮207定义为上齿轮311,将设置在y轴下方的齿轮207定义为下齿轮312。本技术的
齿轮207为圆形齿轮,且齿轮207的形状与齿轮泵容腔206的形状相匹配。如图3所示,上侧边306和下侧边307的圆弧直径分别与齿轮207外齿尖端所围成的圆的直径大致相同,从而一对齿轮207能够容纳在齿轮泵容腔206中且能够分别绕各自的齿轮轴217啮合地旋转。当泡沫比例混合装置100处于工作状态时,齿轮泵102中的一对齿轮207按图3示出的箭头方向旋转。如图3所示,一对齿轮207相对于彼此反向转动。随着一对齿轮207的啮合转动,当上齿轮311的轮齿303旋转至上半部分时,其轮齿303尖端与上侧边306对应的侧壁相贴合;当下齿轮312的轮齿303旋转至下半部分时,其轮齿303尖端与下侧边307对应的侧壁相贴合。一对齿轮207与齿轮泵容腔206侧壁之间的结构设置使得:当齿轮泵102处于工作状态时,啮合齿轮207的左侧外周与左侧边304对应的侧壁形成左侧密封区301,啮合齿轮 207的右侧外周与齿轮泵容腔206的右侧壁形成右侧密封区302。
32.齿轮泵102处于工作状态时,在一对齿轮207互相啮合的位置处,位于齿轮泵102左侧的啮合轮齿303逐渐脱开啮合,且逐渐退出齿间,从而左侧密封区301的容积增大,形成局部真空。由于齿轮泵入口124与外部的泡沫液罐相连,因此,当齿轮泵102左侧密封区301 的压强减小时,泡沫液罐中的泡沫液会在压力的驱动下沿图3所示的箭头方向通过齿轮泵入口124进入左侧密封区301。此时,位于齿轮泵102右侧的啮合轮齿303逐渐进入啮合,从而右侧密封区302的容积减小。随着右侧密封区302的容积减小,右侧密封区302中的泡沫液被逐渐挤出,并且沿图3中的箭头方向从齿轮泵出口205向外排出。当齿轮泵102不断旋转时,左侧密封区301的齿轮207轮齿逐渐脱开啮合,使得左侧密封区301因密封容积变大、压强减小而不断从泡沫液罐中吸取泡沫液,同时右侧密封区302的齿轮207轮齿逐渐进入啮合,使得右侧密封区302因密封容积减小而不断将泡沫液从齿轮泵出口205排出。
33.图4为图1中的罗茨泵101在罗茨泵入口103和罗茨泵出口104位置处的横向剖视图,示出了罗茨泵101在x轴和y轴所限定的平面上的结构。如图4所示,罗茨泵容腔202的横截面也由两条互相平行的直线侧边和两条相对设置的半圆弧线侧边共同限定。其中,两条平行直线侧边和两条半圆弧线侧边分别对应于罗茨泵容腔202的侧壁。两条互相平行的直线侧边分别沿着y轴方向延伸,两条半圆的弧线分别向外凸起设置,位于y轴方向的上下两侧。罗茨泵入口管146内形成的罗茨泵入口103和罗茨泵出口管147内形成的罗茨泵出口104分别贯穿两条平行直线所对应的罗茨泵壳体116侧壁,从而罗茨泵入口103和罗茨泵出口104 分别与罗茨泵容腔202流体连通。如图4所示,罗茨泵入口103位于罗茨泵101的左侧,罗茨泵出口104位于罗茨泵101的右侧。罗茨泵入口103在与罗茨泵容腔202交界的位置处形成入口通道404,罗茨泵出口104在与罗茨泵容腔202交界的位置处形成出口通道405。其中,入口通道404属于罗茨泵入口103的一部分,出口通道405属于罗茨泵出口104的一部分,且入口通道404和出口通道405分别朝向罗茨泵容腔202的中间位置。
34.如图4所示,一对转子203在y轴方向上下相邻布置,其对应的两个转子轴213分别布置在罗茨泵容腔202沿y轴方向延伸的对称轴上。一对转子203包括上转子421和下转子422,其中上转子421位于y轴方向的上方,下转子422位于y轴方向的下方。定义横截面为“8”字形的转子203的顶端与底端之间的连线为最大贯穿线d。限定罗茨泵容腔202的两条半圆弧线的直径略大于最大贯穿线d的长度,从而一对转子203能够容纳在罗茨泵容腔202中,并且能够绕其各自的转子轴213旋转。在图4所示出的状态下,一对转子203的两个最大贯穿线d互相垂直,上转子421的最大贯穿线d沿y轴方向延伸,下转子422的最大贯穿线d 沿x轴方
向延伸,且下转子422的最大贯穿线d位置大致与下侧的半圆弧线的直径位置相重合。其中,在y轴方向上,上转子421的下端恰好容纳在下转子422向内凹陷的腰部位置。
35.当罗茨泵101处于工作状态时,具有一定流速的消防水从罗茨泵入口103进入罗茨泵容腔202,驱动一对转子203分别沿图4示出的箭头方向转动。如图4所示,正常运行状态下,一对转子203相对于彼此反向转动。本技术的发明人发现,当具有一定流速的消防水通过罗茨泵入口103径直进入罗茨泵容腔202中时,部分消防水能够流向罗茨泵容腔202内靠近侧壁的位置,以驱动一对转子203相对于彼此反向转动。然而此时,另一部分消防水会流向罗茨泵容腔202的中间位置,从而阻碍一对转子203如图4所示的箭头方向转动。也就是说,本技术的发明人发现,当不采用电机驱动,而仅通过消防水的动能驱动转子203转动时,消防水在罗茨泵容腔202中的流向对一对转子203的正常转动起重要的作用。为了保证一对转子203在罗茨泵容腔202内正常地转动,本技术的发明人在罗茨泵入口管146所形成的罗茨泵入口103内设置流体引导件401,通过流体引导件401引导消防水流向罗茨泵容腔202内壁的位置,以驱动一对转子203如图4所示的箭头方向正常转动。
36.图5a和图5b分别示出了图1中的罗茨泵下壳体112在不同角度下的内部结构,用于示出流体引导件401的结构。如图5a和5b所示,流体引导件401在罗茨泵入口103内沿z轴方向延伸。在本实施例中,流体引导件401大致呈三棱柱状。三棱柱状的引导件401包括顶面501、底面502和三个侧面402。如图5b所示,顶面501与罗茨泵入口103的顶壁相连接,底面502与罗茨泵入口103的底壁相连接。三个侧面402中存在一个侧面402设置在罗茨泵入口103的入口通道404上。结合图4和图5b可以看到,入口通道404上的侧面402大致位于入口通道404的中间位置,且大致与罗茨泵容腔202的侧壁相齐平。另外两个侧面402 大致朝向消防水进入罗茨泵入口103的方向设置,形成一对流体引导面411,用于引导消防水的流向。一对流体引导面411在连接的位置处形成分流棱403,分流棱403沿z轴方向在顶面501和底面502之间延伸。如图5a所示,分流棱403面向消防水进入罗茨泵入口103 的方向,背离罗茨泵容腔202设置。流体引导件401的流体引导面411被配置为:当流体从罗茨泵入口103流向罗茨泵容腔202时,一对流体引导面411能够引导流体形成两股支流,两股支流背离彼此流动,以分别驱使所述一对转子203彼此反向转动。
37.如图5b所示,为了避开流体引导件401,泡沫接收端口117设置在罗茨泵入口管146的远端,大致处于分流棱403外侧的位置。上述设置使得:从泡沫接收端口117进入罗茨泵入口103的泡沫液能够随着消防水共同流向流体引导件401的一对流体引导面411,并且在一对流体引导面411的引导下共同流向罗茨泵容腔202内能够驱使一对转子203正常工作的方向。本技术的实施例将泡沫接收端口117设置在罗茨泵入口管146上而非设置在罗茨泵容腔 202的侧壁上,上述设置使得泡沫液能够随消防水一起流入罗茨泵容腔202中,因而不干扰罗茨泵容腔202中一对转子203的正常转动。如果将泡沫接收端口117设置在罗茨泵容腔202 的侧壁上,那么来自泡沫接收端口117的泡沫液会直接流入罗茨泵容腔202中,其中泡沫液的流动方向很可能与其邻近的转子203的转动方向不一致,从而干扰一对转子203的正常转动。
38.如图5a和5b所示,设置在入口通道404上的侧面402与分流棱403相对。定义与分流棱403相对的侧面402的面积为a,罗茨泵入口103在罗茨泵壳体116的内壁位置处的入口通道404的开口面积为s。为了提高流体引导件401的导流效果,既保证流体在罗茨泵入口 103
内顺利流动,又有效引导流体流入罗茨泵容腔202中的流动方向,侧面面积a与开口面积s之间可以满足:1/4≤a:s≤3/4。
39.结合图4、图5a和5b可以看到,流体引导件401的横截面为等腰三角形。其中,等腰三角形的两腰对应于一对流体引导面411,等腰三角形的顶点对应于分流棱403,等腰三角形的底边对应于与分流棱403相对的侧面402。如图4所示,等腰三角形的底边位于入口通道 404的中间位置。定义等腰三角形的底边的长度为b,等腰三角形的高为h。为了有效引导流体朝向罗茨泵容腔202侧壁方向流动,保证流体引导件401的导流效果,高h与底边b之间的比值h:b可以满足:1/4≤h:b≤1。在一些实施例中,高h与底边b之间的比值h:b还可以满足:1/3≤h:b≤1/2。在本技术的实施例中,流体引导件401为三棱柱状,在其他实施例中,也可以设置其他形状的流体引导件401,只要能够引导罗茨泵入口103中流体的流向,实现流体对罗茨泵101内一对转子203的有效驱动即可。
40.图6a至图6e分别示出了图4中的一对转子203在一个运行周期下的工作状态,分别从四个典型的阶段描述罗茨泵101的运行状态。本技术将图4中所示出的一对转子203的位置定义为初始位置,图6a中示出的一对转子203的位置与图4完全相同。如图6a所示,当压力流体沿箭头方向从左侧流入罗茨泵入口103时,流体流向一对转子203与罗茨泵容腔202 的侧壁共同封闭形成的左侧a区域。流体在进入罗茨泵容腔202之前,罗茨泵入口103中的流体引导件401能够引导流体分别形成向上和向下流动的两个支流,其中,向上流动的支流流向上转子421,向下流动的支流流向下转子422。向上和向下流动的支流分别朝向罗茨泵容腔202的侧壁流动,为一对转子203提供彼此反向转动的驱动力。
41.在压力流体的旋转驱动下,一对转子203分别如图6a所示的箭头方向进行旋转,以从图6a位置旋转至图6b位置。在一对转子203从图6a位置转至图6b位置的过程中,上转子421的最大贯穿线d从沿y轴方向延伸的位置绕其转子轴213顺时针旋转至向右倾斜的位置,下转子422从沿x轴方向延伸的位置逆时针旋转至向右倾斜的位置。在图6b所示的位置,上转子421的最大贯穿线d与下转子422的最大贯穿线d互相平行。上转子421的右下方与下转子422的左上方相接触,上转子421、下转子422与罗茨泵容腔202侧壁的左侧共同封闭形成左侧b区域。随着上转子421和下转子422的旋转,从罗茨泵入口103流入图6a 中左侧a区域的流体逐渐运动至图6b中的左侧b区域。
42.随着压力流体不断从罗茨泵入口103流入罗茨泵容腔202,一对转子203不断获得来自压力流体的旋转动能,继而逐次从图6b位置旋转至图6c位置、图6d位置和图6e位置。在从图6b位置转至图6c位置的过程中,上转子421从向右倾斜的位置顺时针旋转至沿x轴方向延伸的位置,下转子422从向右倾斜的位置逆时针旋转至沿y轴方向延伸的位置。在图 6c所示的位置,上转子421与罗茨泵容腔202的侧壁共同封闭形成上方c区域。随着上转子 421和下转子422的旋转,图6b中左侧b区域的流体逐渐运动至图6c中的上方c区域。
43.在图6d所示的位置,上转子421的最大贯穿线d与下转子422的最大贯穿线d互相平行,分别向左倾斜。上转子421的左下方与下转子422的右上方相接触,上转子421、下转子422与罗茨泵容腔202侧壁的右侧共同封闭形成右侧e区域。随着上转子421和下转子422 的旋转,图6c中上方c区域的流体逐渐运动至图6d中的右侧e区域。如图6d所示,右侧 e区域与罗茨泵出口104相连通。
44.在一对转子203从图6d位置转至图6e位置的过程中,上转子421的最大贯穿线d从
向外排出。在本技术的实施例中,罗茨泵出口104与外部的消防管道相连通。由于齿轮泵102 和罗茨泵101始终同步地转动,因此,本技术的泡沫比例混合装置100能够始终以稳定的比例混合消防水和泡沫液。
48.一方面,本技术将罗茨泵101应用于泡沫比例混合装置100中,利用罗茨泵101体积小的优点,其制备得到的泡沫比例混合装置100结构简便紧凑。另一方面,本技术在罗茨泵101 的罗茨泵入口103中设置特定结构的流体引导件401,通过流体引导件401控制流入罗茨泵容腔202中的流体流向,从而利用流体本身的压力驱动罗茨泵101内的一对转子203有效转动。本技术的泡沫比例混合装置100仅通过压力流体的作用即可实现消防水和泡沫液按照一定比例稳定地混合和输送,无需额外的附加动力,具有出口流量大、压力损失小、使用方便快捷的优点。另外由于体积小且紧凑,本技术的泡沫比例混合装置100能够安装在竖直和水平的管道中,以适用于多种场合下的消防工作。
49.尽管本文中仅对本技术的一些特征进行了图示和描述,但是对本领域技术人员来说可以进行多种改进和变化。因此应该理解,所附的权利要求旨在覆盖所有落入本技术实质精神范围内的上述改进和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1