一种具有语音和报警功能的消防救生机器人的制作方法
1.本实用新型属于机器人领域,具体涉及一种具有语音和报警功能的消防救生机器人。
背景技术:
2.面对当前城市地铁、隧道、公共建筑以及各种大型石油化工的快速增长,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患不断增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。而且火灾之后,由于断电缘故,加之搜救环境比较嘈杂,很难听到被困人员呼救,搜救难度加大。通常的消防设备往往存在体积过大、移动不便等不利因素,依靠消防员的人工模式又极大地增加了消防人员人身危险性。
技术实现要素:
3.为了解决现有技术中存在的上述问题,本实用新型提供了一种具有语音和报警功能的消防救生机器人。本实用新型要解决的技术问题通过以下技术方案实现:
4.本实用新型提供了一种具有语音和报警功能的消防救生机器人,包括:中央服务器单元,与远程控制单元连接,设置于消防机器人内部,用于消防机器人的行走控制、消防灭火控制、传感器信号分析判断、控制模式管理及电源管理;远程控制单元,连接中央服务器单元,并利用中央服务器单元给各单元发布命令;连接单元,用以连接外部远程控制单元。驱动与行走单元,设置在消防机器人底部,用于驱动所述消防机器人的行走与转向;消防灭火单元,设置在消防机器人机壳顶部,可上下左右摆动,使消防水对准火灾现场火源实施灭火作业;障碍物检测传感器,设置在消防机器人外壳周围,测量障碍物距消防机器人的距离,由所述的中央服务器单元与处理器进行路径规划与壁障;火源点距离检测传感器,设置在所述消防机器人顶部,测量消防机器人与火源点的距离,并判断是否在可实施灭火作业的有效作业半径范围内;气体成分检测与显示单元,检测火灾现场环境的空气成分,并进行显示;人体热成像仪,设置在所述消防机器人顶部,测量是否有被困人员;高清摄像头,设置在所述消防机器人顶部,用以观察火灾情况,便于外部营救人员寻找最佳逃生位置;语音单元,用以营救人员指导被困人员逃生;报警单元,用以提醒尚不知情的被困人员注意火灾;充电单元,用于为消防机器人提供电源。
5.在本实用新型的一个实施例中,所述报警单元为一蜂鸣器。
6.在本实用新型的一个实施例中,所述消防灭火单元包括消防炮底座壳体,连接在所述底座壳体的消防水管接入口,连接在所述底座壳体的消防水喷射出口,以及设置在所述底座壳体内部的运动装置。
7.在本实用新型的一个实施例中,所述障碍物检测传感器为超声检测距离传感器。
8.在本实用新型的一个实施例中,所述火源点距离检测传感器为红外热成像传感
器。
9.在本实用新型的一个实施例中,所述人体热成像仪为红外热成像传感器。
10.在本实用新型的一个实施例中,所述连接单元通过gprs网络或gsm网络与所述远程控制单元进行数据通信。
11.在本实用新型的一个实施例中,所述语音单元为扬声器。
12.与现有技术相比,本实用新型的有益效果在于:
13.在火灾中利用人体热成像仪可以及时准确的发现被困人员,并指导被困人员以最快的方式,最短的时间脱离危险;可以减少营救人员不必要的牺牲;在面对一些小的火灾时,可以直接利用消防灭火单元自带的灭火设备扑灭,及时有效的控制火源;当出现不知情的被困人员时,可以提醒被困人员及时逃生,还可以用以指导被困人员。
14.以下将结合附图及实施例对本实用新型做进一步详细说明。
附图说明
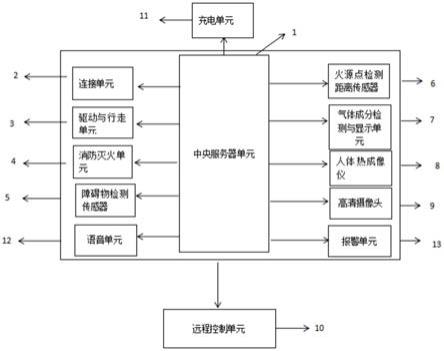
15.图1是本实用新型实施例提供的一种具有语音和报警功能的消防救生机器人。
具体实施方式
16.为了进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及具体实施方式,对依据本实用新型提出的具有语音和报警作用报警功能的消防救生机器人进行详细说明。
17.有关本实用新型的前述及其他技术内容、特点及功效,在以下配合附图的具体实施方式详细说明中即可清楚地呈现。通过具体实施方式的说明,可对本实用新型为达成预定目的所采取的技术手段及功效进行更加深入且具体地了解,然而所附附图仅是提供参考与说明之用,并非用来对本实用新型的技术方案加以限制。
18.应当说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的物品或者设备中还存在另外的相同要素。
19.实施例一
20.请参见图1,图1是本实用新型实施例提供的一种具有语音和报警作用报警功能的消防救生机器人。该消防救生机器人,包括:中央服务器单元1,与远程控制单元10连接,设置于消防机器人内部,用于消防机器人的行走控制、消防灭火控制、传感器信号分析判断、控制模式管理及电源管理;远程控制单元,连接中央服务器单元,并利用中央服务器单元给各单元发布命令;连接单元2,用以连接外部远程控制单元。驱动与行走单元3,设置在消防机器人底部,用于驱动所述消防机器人的行走与转向;消防灭火单元4,设置在消防机器人机壳顶部,可上下左右摆动,使消防水对准火灾现场火源实施灭火作业;障碍物检测传感器5,设置在消防机器人外壳周围,测量障碍物距消防机器人的距离,由所述的中央服务器单元单元进行路径规划与壁障;火源点距离检测传感器6,设置在所述消防机器人顶部,测量
消防机器人与火源点的距离,并判断是否在可实施灭火作业的有效作业半径范围内;气体成分检测与显示单元7,检测火灾现场环境的空气成分,并进行显示;人体热成像仪8,设置在所述消防机器人顶部,测量是否有被困人员;高清摄像头9,设置在所述消防机器人顶部,用以观察火灾情况,便于外部营救人员寻找最佳逃生位置;语音单元12,用以营救人员指导被困人员逃生;报警单元13,用以提醒尚不知情的被困人员注意火灾。充电单元11,用于为消防机器人提供电源。
21.首先,中央服务器单元1是整个机器人的控制中心,所有的指令由其发布,而中央服务器单元连接于远程控制器单元10,也就是说,消防救生机器人的所有动作都是由远程控制的救援人员完成的。
22.进一步的,所述消防灭火单元4包括消防炮底座壳体,连接在所述底座壳体的消防水管接入口,连接在所述底座壳体的消防水喷射出口,以及设置在所述底座壳体内部的运动装置。
23.进一步的,所述报警单元13为一蜂鸣器。所述障碍物检测传感器5为超声检测距离传感器。所述火源点距离检测传感器6为红外热成像传感器。所述人体热成像仪8为红外热成像传感器,利用人体热成像仪可以准确地找到有生命体征的被困人员。
24.进一步的,所述连接单元2通过gprs网络或gsm网络与所述远程控制单元进行数据通信,救援人员可以通过这个网络准确的操纵机器人营救。
25.进一步的,所述语音单元12为扬声器。
26.在火灾中利用人体热成像仪可以及时准确的发现被困人员,并指导被困人员以最快的方式,最短的时间脱离危险;可以减少营救人员不必要的牺牲;在面对一些小的火灾时,可以直接利用消防灭火单元自带的灭火设备扑灭,及时有效的控制火源;当出现不知情的被困人员时,可以提醒被困人员及时逃生,还可以用以指导被困人员,利用搭载了这些高科技所产品的消防救生机器人,在火灾发生的时候可以准确,及时的营救被困人员,从而降低火灾的损失。
27.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1