换流站阀厅智能消防灭火机器人系统的制作方法
1.本发明属于消防技术领域,尤其涉及一种换流站阀厅智能消防灭火机器人系统。
背景技术:
2.现有阀厅内均配置有火灾自动监测系统,有的阀厅还配置有阀厅轨道式智能检测机器人,可实时监测阀厅内各设备当前状况,具有巡检、预警、监控等一系列功能。但是目前国内轨道式巡检机器人不具有消防灭火功能,不能进行设备火灾初期的干预控制,浪费了扑灭初期火灾的黄金时期。
技术实现要素:
3.本发明的目的在于提供一种换流站阀厅智能消防灭火机器人系统,解决现有阀厅消防干预不及时的问题。
4.为实现上述目的,本发明提供一种换流站阀厅智能消防灭火机器人系统,包括站内火灾自动监测系统、与所述站内火灾自动监测系统相联接的机器人后台控制系统以及与所述机器人后台控制系统相联接的消防机器人。
5.根据本发明的一个方面,所述机器人后台控制系统包括平台层、数据层、功能层、业务处理层和表示层。
6.根据本发明的一个方面,所述平台层包括计算机平台、网络基础、综合布线、操作系统平台和tcp/ip协议;
7.所述数据层采用mysql数据库,用于数据存储;
8.所述功能层实现对于数据的访问,屏蔽数据访问的技术细节;
9.所述业务处理层用于处理有关业务数据和控制请求;
10.所述表示层用于数据展示以及用户之间的交互。
11.根据本发明的一个方面,所述消防机器人包括履带式运动平台以及设置在所述履带式运动平台上的消防水炮、uwb定位系统、云台系统以及车载陀螺仪。
12.根据本发明的一个方面,所述云台系统包括可见光相机和红外热像仪,所述消防水炮具有连接管路,所述连接管路与高压接水管相连接。
13.根据本发明的一个方面,所述消防机器人还包括供电系统。
14.根据本发明的一个方面,当站内火灾自动监测系统监测到阀厅内部烟雾或电弧火焰后,发出信息通知运维人员并在运维室显示现场设备的报警点、故障点,并根据提前设置的逻辑将报警点、故障点发送给消防机器人,消防机器人接收到灭火指令及位置信息后,自动规划路径动作至指定位置附近,进行灭火工作。
15.本发明的换流站阀厅智能消防灭火机器人系统,当站内火灾自动监测系统监测到阀厅内部烟雾或电弧火焰后,火灾控制主机通知运维人员并在运维室显示现场设备的报警点、故障点,并根据提前设置的逻辑将报警点、故障点发送给消防机器人,消防机器人接收到灭火指令及位置信息后,自动规划路径动作至指定位置附近,并根据机器人上搭载的热
成像仪和可见光来调整水炮位置进行灭火工作。
附图说明
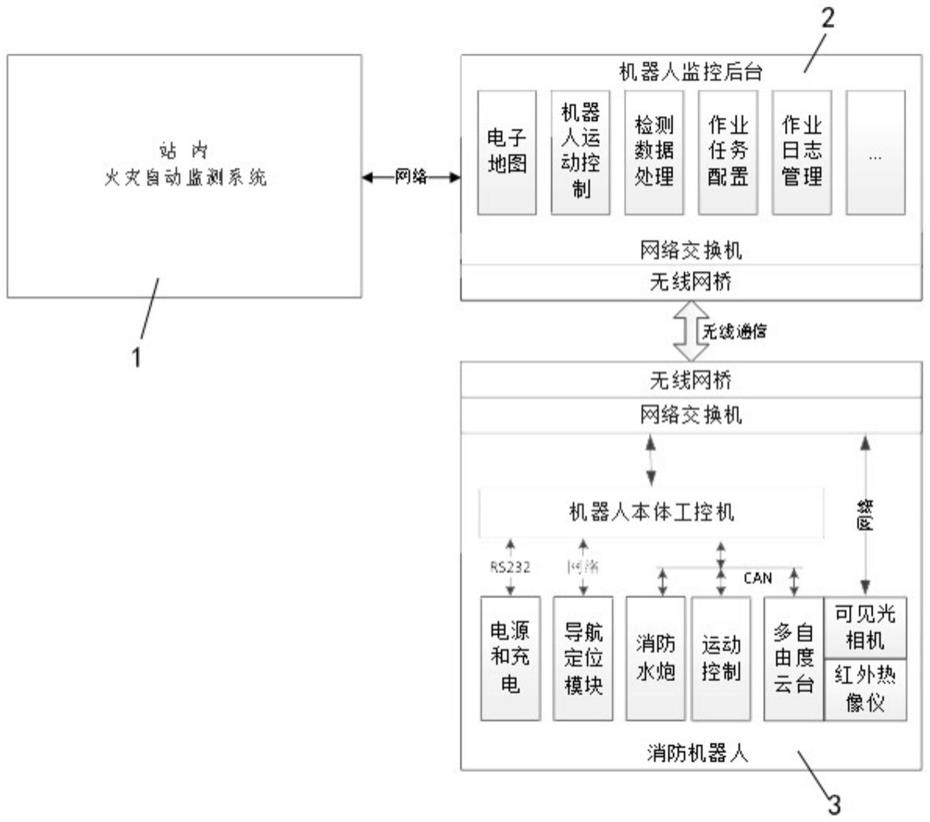
16.图1示意性表示本发明一种实施方式的换流站阀厅智能消防灭火机器人系统的组成示图;
17.图2示意性表示根据本发明的换流站阀厅智能消防灭火机器人系统的火情处理示图;
18.图3示意性表示根据本发明一种实施方式的机器人后台控制系统的组成示图;
19.图4示意性表示根据本发明一种实施方式的消防机器人的结构示图;
20.图5示意性表示根据本发明一种实施方式的履带式运动平台的结构示图;
21.图6示意性表示根据本发明一种实施方式的消防机器人控制系统的结构示图;
22.图7示意性表示根据本发明的消防机器人的充电原理示图;
23.图8示意性表示根据本发明的消防机器人的导向定位系统的结构示图;
24.图9示意性表示消防机器人部分结构安装示图;
25.图10示意性表示高端厅现场布置图。
具体实施方式
26.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
28.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
29.如图1所示,本发明提供一种换流站阀厅智能消防灭火机器人系统,包括站内火灾自动监测系统1、与所述站内火灾自动监测系统1相联接的机器人后台控制系统2以及与所述机器人后台控制系统2相联接的消防机器人3。
30.如图2所示,站内火灾自动监测系统对阀厅内的检测点进行监测和定位,一旦发生火灾或火灾隐患,该系统通过网络通信将火灾位置信息发送到消防机器人控制后台。消防机器人控制后台实现对消防机器人作业任务的管理和记录,当接收到火灾位置信息后,立即启动机器人执行灭火任务,同时自动规划最优的导航路径,确保机器人在最短的时间内到达火灾现场进行灭火作业。
31.如图3所示,本发明的机器人后台控制系统2包括平台层、数据层、功能层、业务处理层和表示层。平台层包括计算机平台、网络基础、综合布线、操作系统平台和tcp/ip协议;所述数据层采用mysql数据库,用于数据存储;所述功能层实现对于数据的访问,屏蔽数据
访问的技术细节;所述业务处理层用于处理有关业务数据和控制请求;所述表示层用于数据展示以及用户之间的交互。
32.结合图4和图5所示,根据本发明的一种实施方式,消防机器人3包括履带式运动平台31以及设置在所述履带式运动平台31上的消防水炮32、uwb定位系统、云台系统以及车载陀螺仪。云台系统包括可见光相机和红外热像仪,消防水炮32具有连接管路33,连接管路33与高压接水管相连接。
33.在本实施方式中,消防机器人搭载40消防炮,以及可见光相机、红外热像仪等检测设备,实现对火灾状态的自动识别。机器人采用履带式运动平台,由锂电池提供整个机器人需要的动力,采用大功率直流伺服驱动技术,最大限度发挥机器人本身的拖拽能力,实现满水单水带拖拽100m,充分满足整个阀厅内需求。采用uwb导航定位技术,可在发生火灾后自主精确快速地运动到火源附近实施自主灭火,并通过无线通讯进行机器人与高压接水管的交互,实现加压设备的快速启动。消防机器人3还包括供电系统。机器人可进行自主充电,实现机器人的自维护。
34.考虑到机器人需具有一定的拖拽能力和灵活的转向性能,采用履带式运动平台。由锂电池提供整个机器人所需的动力。该运动平台如下图所示。该运动平台采用由双履带驱动,由于双履带式机器人,具有驱动力大、与路面粘着力较强、着地压强小和良好的越障能力等优点。采用伺服电机差速驱动,实现对运动平台的精确控制和运动的平稳性,同时,该运动平台可实现转向半径为零的原地转向,提高其在狭小空间内的灵活性。通过加设超声波检测,实时对周围障碍物进行检测,提高设备和机器人的安全裕度。
35.该履带底盘采用先进的克里斯蒂悬挂,整机质量为260kg左右,长度为1.1m,宽度为0.8m,载重160kg,设计时速5km,爬坡角度30度,越障能力为18cm,并可实现原地转向,完全适应阀厅内的行走。
36.该履带底盘的驱动力大功率直流伺服驱动电机提供,满足大拖拽能力的同时,具有很好的伺服控制性能;
37.机载总控系统包括控制系统、通讯系统和锂电池等组成,控制整个机器人系统的动作,该部分进行局部防护,防护等级可达ip67,避免在灭火作业时水进入。
38.如图6所示,机器人本体包括运动控制模块,安全防护模块,无线通讯模块、电源管理模块、定位导航模块以及检测模块等,由下位机管理模块进行调度和控制。机器人本体与后台计算机通过双频wifi技术实现无线通讯,机器人下位机位于与后台计算机和机器人本体模块之间,完成本体数据汇集和后台计算机控制命令转发功能,并实现部分业务逻辑。其中,运动控制模块主要实现对机器人行走的控制,由运动控制器、左右履带驱动电机及其驱动器组成。运动控制器通过can总线与下位机连接,接收下位机下发的指令,并上报机器人当前的运动状态信息,通过分别控制左、右侧履带电机,控制机器人完成前进、后退、转弯等动作。电机驱动器通过数据总线接收电机控制器下发的pwm信号,经过放大转换为3相pwm脉冲,直接驱动电机运动。同时,电机驱动器接收电机的霍尔换向信号和编码器信号,在驱动器内部实现电流闭环和速度闭环。为了确保机器人以及阀厅内设备的安全,避免机器人与设备发生碰撞造成损失,控制系统需要设置安全防护模块。该模块主要包括由超声波传感器组成的障碍物检测系统以及安全触边碰撞防护系统组成,通过多级防护保证机器人的运行安全。
39.如图7所示,本发明的消防机器人自动充电系统采用无线充电技术实现,通过电源管理模块对机器人电池电量进行检测并自动实现充电控制。无线充电系统包括供电端和受电端两个部分。供电端首先通过原级电能变换装置将工频交流电转换为高频交流电,然后将该高频交流电注入到原级谐振网络,并在原级谐振网络的发射线圈周围的一定空间范围内产生高频交变磁场(耦合磁场);受电端的接收线圈会捕获到部分高频交变磁场,并产生高频感应电压,次级功率变换装置对该高频交流电压进行变换调节,使其最终满足负载的电源要求机器人无线充电系统由固定位置放置的无线电能发射装置及发射机构和安装了机载端无线充电接收、变换装置的机器人本体组成。机器人通过定位导航系统自动行驶至定点充电处,发射装置识别出负载的进入,开始由低功耗待机模式切换为正常工作模式,并在发射线圈中产生恒定的高频交变电流,机载变换装置将拾取线圈中的感应交变电压变换为机载电池组充电所需要的电能。当机器人切出之后,原级变换装置再次进入低功耗待机模式。
40.如图8所示,实现准确的自定位是移动机器人完成自主路径规划、避障等任务的要求,是多移动机器人实现较为复杂的协作任务的基础。机器人所采用的自定位技术与机器人自身配备的传感器密切相关,本系统采用了一种基于里程计、惯导系统、uwb的定位方法,提高机器人大范围导航过程中定位的精确度。具体来说,在机器人后台监控计算机中存储了整个阀厅的地图信息,当需要启动一次巡视任务时,后台监控计算机会将此次任务需要检测的设备的位置坐标、设备的类型、检测的项目等通过无线通讯方式下发到下位机,启动此次巡视任务。任务开始后,下位机根据里程计、惯导系统、uwb等传感器获取的机器人定位数据,通过滤波算法进行融合后,获取机器人在当前地图中的精确位置坐标和姿态。通过导航算法,计算出机器人两侧履带的运行速度,生成运动指令,下发至机器人运动控制器,从而控制机器人自主运动。机器人巡视过程中,下位机会将机器人当前的位置、运行速度、巡视结果等运行数据通过无线通讯反馈至后台监控计算机,存储在后台数据库中,以供查询和分析。
41.系统中采用的uwb定位技术有如下特点1:系统定位精度小于20厘米。2:抗干扰,uwb技术不受粉尘、雨雪条件影响定位精度,可以在高电压、强磁场条件下使用。3:远距离,单基站覆盖半径可以大于40米。4:实时性,位置刷新频率可以做到1-30hz。
42.参照图9所示,本发明中的无线充电装置通过4颗m16*120膨胀螺丝安装于地面,充电控制箱通过2颗m16*120膨胀螺丝安装于地面,uwb基站通过4颗m16*120膨胀螺丝安装于地面,电磁控制箱通过4颗m16*120膨胀螺丝安装于地面。
43.参照图10所示,高端阀厅内封堵侧绝缘支撑较多,不适合消防机器人拖拽水带大范围工作,机器人可拖拽水带在绝缘支撑呵墙壁之间的空间进行定位消防。而针对低端厅现场,绝缘支撑与封堵空间太小,对侧空间大,绝缘支撑少,适合机器人进行拖拽水带动作。
44.如图2所示,阀厅的主要保护对象为换流阀、封堵等部位,阀体的火灾工况是以异常电弧引起的电气火灾为主,已投运和在建的换流站阀厅,均配置火灾自动监测系统,机器人推荐搭载热成像仪和可见光来进行火焰位置识别和水炮对准消防机器人支持远程遥控和全自主灭火两种方式,当站内火灾自动监测系统监测到阀厅内部烟雾或电弧火焰后,火灾控制主机通知运维人员并在运维室显示现场设备的报警点、故障点,并根据提前设置的逻辑将报警点、故障点发送给消防机器人,消防机器人接收到灭火指令及位置信息后,自动
规划路径动作至指定位置附近,并根据机器人上搭载的热成像仪和可见光来调整水炮位置进行灭火工作。以上所述仅为本发明的一个方案而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1