一种用于建筑消防给水系统的可视化监管方法与流程
1.本发明涉及消防安全技术领域,尤其是一种用于建筑消防给水系统的可视化监管方法。
背景技术:
2.建筑消防给水系统是消防系统中的一个子系统,建筑消防给水系统由消防水源、给水管网、消防栓、消防水泵、喷淋装置、消防供水装置(泵房、水箱、稳压装置等)以及管路附件等组成,各组件正常运行是整个建筑消防给水系统正常工作关键。
3.目前,市面上对于建筑消防给水系统的监控,只是针对建筑消防给水系统的各个组件本身的运行状态进行实时监控,仅针对各个组件本身的运行状态做简单的列表展示,忽略了各组件间的拓扑关系,无法基于拓扑关系进行异常的分析,也不能对目标组件实现的快速的实地定位。
技术实现要素:
4.为了克服上述现有技术中的缺陷,本发明提供一种用于建筑消防给水系统的可视化监管方法,基于建筑消防给水系统的拓扑图,能够实现设备的异常判断和异常分析,以及能够实现建筑消防给水系统的可视化监管。
5.为实现上述目的,本发明采用以下技术方案,包括:
6.一种用于建筑消防给水系统的可视化监管方法,包括以下步骤:
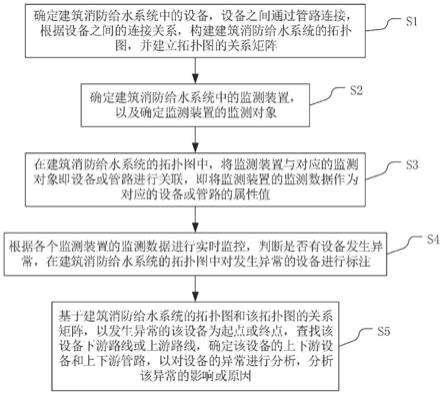
7.s1,确定建筑消防给水系统中的设备,设备之间通过管路连接,根据设备之间的连接关系,构建建筑消防给水系统的拓扑图;
8.s2,确定建筑消防给水系统中的监测装置,以及确定监测装置的监测对象;监测对象即为建筑消防给水系统中的设备或管路;
9.s3,在建筑消防给水系统的拓扑图中,将监测装置与对应的监测对象即设备或管路进行关联,即将监测装置的监测数据作为对应的设备或管路的属性值;
10.s4,根据各个监测装置的监测数据进行实时监控,判断是否有设备发生异常,在建筑消防给水系统的拓扑图中对发生异常的设备进行标注;
11.s5,基于建筑消防给水系统的拓扑图,对设备的异常进行分析,分析该异常的影响或原因。
12.进一步地,步骤s1中,用图标表示设备,设备之间通过管路连接,用有向线段表示管路,有向线段的方向即表示管路内的水流方向,构建建筑消防给水系统的拓扑图。
13.进一步地,步骤s1中,基于建筑消防给水系统的拓扑图,建立拓扑图的关系矩阵z:
14.z=[z
i,j
],i=1,2,3
…
,j=1,2,3
…
;
[0015]
其中,i表示拓扑图中的第i个图标,j表示拓扑图中的第j个图标;
[0016]zi,j
表示以图标i为起点,图标j为终点,图标i与图标j之间的连接关系;
[0017]zi,j
的取值为0或1;其中,z
i,j
=1表示以图标i为起点,图标j为终点,图标i与图标j
之间相连接;z
i,j
=0表示以图标i为起点,图标j为终点,图标i与图标j之间不相连接。
[0018]
进一步地,步骤s5中,从建筑消防给水系统的拓扑图中,确定发生异常的设备所对应的图标;在拓扑图的关系矩阵中,以该图标为起点和终点,查找以该图标为起点的下游路线以及以该图标为终点的上游路线,确定该设备的上下游设备和上下游管路;
[0019]
查找以该图标为起点的下游路线,具体过程如下所示:
[0020]
在拓扑图的关系矩阵中,寻找以该图标为起点且连接关系为1的图标,即第一终点图标;以第一终点图标为起点,寻找以第一终点图标为起点且连接关系为1的图标,即第二终点图标;按照该方式继续查找,直至以第n终点图标为起点时没有连接关系为1的图标,则表示该第n终点图标即为该图标的下游路线的总终点,得到该图标的下游设备即为第一终点图标、第二终点图标、
…
第n终点图标所对应的设备;下游管路即为第一终点图标、第二终点图标、
…
第n终点图标所对应设备之间的连接管路;
[0021]
查找以该图标为终点的上游路线,具体过程如下所示:
[0022]
在拓扑图的关系矩阵中,寻找以该图标为终点且连接关系为1的图标,即第一起点图标;以第一起点图标为终点,寻找以第一起点图标为终点且连接关系为1的图标,即第二起点图标;按照该方式继续查找,直至以第n起点图标为起点时没有连接关系为1的图标,则表示该第m起点图标即为该图标的上游路线的总起点,得到该图标的上游设备即为第m起点图标、第二起点图标、
…
第一起点图标所对应的设备;下游管路即为第m起点图标、第二起点图标、
…
第一起点图标所对应设备之间的连接管路。
[0023]
进一步地,步骤s5中,若建筑消防给水系统中的水流指示器发生异常,则基于建筑消防给水系统的拓扑图和该拓扑图的关系矩阵,以水流指示器为起点向下溯源,依次查看水流指示器的下游设备是否异常,直至发现正常的下游设备,则停止向下溯源,该正常的下游设备即为下游异常结点;以水流指示器为终点向上溯源,依次查看水流指示器的上游设备是否异常,直至发现正常的上游设备,则停止向上溯源,该正常的上游设备即为上游异常结点;
[0024]
该下游异常结点和上游异常节点之间的所有管路和设备均受该水流指示器的异常影响,在建筑消防给水系统的拓扑图中,对该下游异常结点和上游异常节点之间的所有管路和设备均进行标注。
[0025]
进一步地,步骤s5中,若建筑消防给水系统中的末端试水装置发生异常,则基于建筑消防给水系统的拓扑图和该拓扑图的关系矩阵,以末端试水装置为终点向上溯源,依次查看末端试水装置的上游设备是否异常,直至发现正常的上游设备,则停止向上溯源;
[0026]
该正常的上游设备与末端试水装置之间的所有管路和设备均可能为该末端试水装置的异常原因,在建筑消防给水系统的拓扑图中,对该正常的上游设备与末端试水装置之间的所有管路和设备均进行标注。
[0027]
进一步地,步骤s5中,
[0028]
若建筑消防给水系统中的报警阀发生异常,则基于建筑消防给水系统的拓扑图和该拓扑图的关系矩阵,以报警阀为起点向下溯源,找出报警阀的所有下游管路和下游设备,报警阀的所有下游管路和下游设备均受该报警阀的异常影响,在建筑消防给水系统的拓扑图中,对报警阀的所有下游管路和下游设备均进行标注;
[0029]
若建筑消防给水系统中的消防泵发生异常,则基于建筑消防给水系统的拓扑图和
该拓扑图的关系矩阵,以消防泵为起点向下溯源,找出消防泵的所有下游管路和下游设备,消防泵的所有下游管路和下游设备均受该消防泵的异常影响,在建筑消防给水系统的拓扑图中,对消防泵的所有下游管路和下游设备均进行标注。
[0030]
进一步地,在建筑消防给水系统的拓扑图中,将设备的地理位置、运行信息、设备基本信息也作为对应设备的属性值;
[0031]
若接收到设备的运行信号后,则在建筑消防给水系统的拓扑图中,自动展示消防供水路径;若设备发生异常后,则在建筑消防给水系统的拓扑图中,对发生异常的设备的属性值进行展示。
[0032]
进一步地,在建筑消防给水系统的拓扑图中,将设备与建筑的gis地图进行关联,确定设备在建筑的gis地图中的位置,根据用户的当前位置并结合gis平面地图,自动规划用户到达设备的线路并进行导航。
[0033]
进一步地,建筑消防给水系统中的设备包括:消防水池、消防水箱、消防泵、报警阀、水流指示器、阀门、末端试水装置;建筑消防给水系统中的监测装置包括:液位传感器、振动传感器、阀门监测仪、压力传感器、流量传感器;
[0034]
步骤s4中,根据各个监测装置的监测数据进行实时监控,判断是否有设备发生异常,其中,
[0035]
判断消防泵是否发生异常,包括以下步骤:
[0036]
s11,通过设置于消防泵上的振动传感器,获取消防泵的实际振动数据v;振动数据是指消防泵在某频率下振动的振幅数据;
[0037]
s12,预先存储有消防泵在该频率下正常运行时的样本振动数据v
′
;将消防泵的实际振动数据v与样本振动数据v
′
进行比较,若v
′‑
δv≤v≤v
′
+δv,则表示消防泵的振动状态为正常;否则表示消防泵的振动状态为异常,即消防泵为异常;其中,δv为设定的波动范围;
[0038]
判断支管路末端的末端试水装置是否发生异常,包括以下步骤:
[0039]
s41,通过设置于消防水箱上的液位传感器,获取消防水箱的液位值b1;消防水箱的箱底相对地面的高度为h
b1
;
[0040]
s42,依次开启每层支管路上的末端试水装置,每层支管路进行末端放水;
[0041]
其中,建筑共有m层,建筑的第m层支管路即为建筑的最高层支管路;
[0042]
s43,在消防泵未启动时,通过设置于最高层支管路即第m层支管路上的流量传感器,获取消防泵未启动时最高层即第m层支管路中水流的流速值f
′m;
[0043]
根据消防水箱的液位值b1、消防水箱的箱底相对地面的高度h
b1
、第m层支管路相对地面的高度hm,以及根据消防泵未启动时第m层支管路中水流的流速值f
′m,计算支管路末端放水时的单位压力流速的阈值ts:
[0044]
ts=(b1+h
b1-hm)
×
9.8/f
′m;
[0045]
s44,消防泵启动后,通过阀门监测仪,分别获取每层支管路上的信号阀的开关状态,建立阀门状态集c,c=[cm|m=1,2,
…
m],cm表示第m个信号阀的开关状态,cm的取值为0或1,cm=0表示第m个信号阀为关闭状态;cm=1表示第m个信号阀为打开状态;
[0046]
s45,通过设置于每层支管路上的压力传感器,分别获取每层支管路末端的动水压值,建立管网动水压集e,e=[em|m=1,2,
…
m],em为建筑的第m层支管路的动水压值;
[0047]
s46,通过设置于每层支管路上的流量传感器,分别获取每层支管路中水流的流速值,建立管网流速集f,f=[fm|m=1,2,
…
m],fm为建筑的第m层支管路中水流的流速值;
[0048]
s47,根据消防泵的振动状态,阀门状态集c、管网动水压集e、管网流速集f,计算每层支管路末端放水时的单位压力流速;
[0049]
其中,建筑的第m层支管路末端放水时的单位压力流速sm为:
[0050][0051]vz
表示消防泵的振动状态,vz=1表示消防泵的振动状态为正常,vz=0表示消防泵的振动状态为正常;
[0052]
若第m层支管路末端放水时的单位压力流速sm大于支管路末端放水时的单位压力流速的阈值ts,则表示该第m层支管路末端放水正常,即该第m层支管路末端的末端试水装置为正常;否则,表示该第m层支管路末端放水异常,即该第m层支管路末端的末端试水装置为异常。
[0053]
本发明的优点在于:
[0054]
(1)本发明的可视化监管方法通过构建建筑消防给水系统的拓扑图,能够直观展示建筑消防给水系统中设备的连接关系,在拓扑图中进行监测数据的关联,基于监测装置的监测数据判断设备异常,判断结果更加准确合理,基于拓扑图中设备的连接关系进行设备的异常分析,分析异常的原因影响。
[0055]
(2)本发明的可视化监管方法通过构建建筑消防给水系统的拓扑图,基于建筑消防给水系统的拓扑图,建立拓扑图的关系矩阵,利用关系矩阵表示各个图标之间的连接关系,将各个设备之间的连接关系,以及设备连接管路中的水流方向用数据表示出来,能够方便快捷的查找出设备的上下游路线以及上下游设备和上下游管路,有利于后续对设备进行异常分析,为准确分析出异常的原因影响提供保障。
[0056]
(3)本发明通过将建筑的每层室内gis平面地图与该层的设备地理位置进行关联,确定设备在建筑的gis地图中的位置,在用户端设置gps定位模块获取用户的当前位置,根据用户的当前位置并结合gis平面地图,自动规划用户到达指定设备的可达线路并进行导航。
[0057]
(4)本发明通过设置于消防水箱上的液位传感器,设置于消防泵上的振动传感器,阀门监测仪,分别设置于建筑的每层支管路和总管路上的压力传感器,以及分别设置于建筑的每层支管路上的流量传感器,从而获取建筑消防给水系统中的各个设备和管路的监测数据,从而实现对建筑消防给水系统的设备异常的准确判断。
[0058]
(5)本发明根据消防水箱的液位值、消防水箱的箱底相对地面的高度、建筑的最高层支管路相对地面的高度,以及消防泵未启动时建筑的最高层支管路中水流的流速值,计算支管路末端放水时的单位压力流速的阈值,利用该阈值对支管路末端放水时的单位压力流速进行判断,从而实现对末端试水装置是否异常的判断。并且,本发明在计算支管路末端放水时的单位压力流速,判断支管路末端放水是否正常时,综合考虑了消防泵的振动状态、支管路上信号阀的开关状态、支管路中水流的流速,判断的准确度更高。
[0059]
(6)本发明基于建筑消防给水系统的拓扑图,对设备的异常进行分析,分析异常的原因或影响,并建筑消防给水系统的拓扑图中,将异常设备的影响范围或设备异常的可能
原因进行标注,作直观呈现,便于用户进行定位排查,同时,由于关联了室内gis平面地图,还可自动规划用户到达指定设备的可达线路并进行导航。
附图说明
[0060]
图1为现有技术中的建筑消防给水系统的示意图。
[0061]
图2为本发明的一种用于建筑消防给水系统的可视化监管系统的示意图。
[0062]
图3为本发明的一种用于建筑消防给水系统的可视化监管方法的流程图。
[0063]
图4为本发明的一种用于建筑消防给水系统的可视化监管系统的网络架构图。
[0064]
图5为本实施例的建筑消防给水系统的部分拓扑图。
具体实施方式
[0065]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0066]
由图1所示,现有技术中的建筑消防给水系统,包括以下系统设备:消防水池、消防水箱、消防泵、报警阀、水流指示器、阀门、末端试水装置;
[0067]
消防水箱位于建筑顶部,通过消防水箱输出管路与建筑的总管路连接,建筑的总管路分别与建筑的每层支管路连接,消防水箱通过总管路向每层支管路输送水源;
[0068]
消防水池位于地面或地底,通过消防水池输出管路与建筑的总管路连接,建筑的总管路分别与建筑的每层支管路连接,消防水池通过总管路向每层支管路输送水源;消防水池输出管路上设有消防泵,消防泵用于提供消防水池向每层支管路输送水源的动力;
[0069]
阀门包括:设置于建筑的每层支管路上的信号阀,设置于建筑的总管路上的信号阀,以及设置于消防水池输出管路上的闸阀;
[0070]
水流指示器设置于建筑的每层支管路上,用于指示每层支管路中水流的流速;
[0071]
报警阀设置于建筑的总管路上,用于接通和切断总管路中的水源;
[0072]
末端试水装置设置于建筑的每层支管路的末端。
[0073]
由图2所示,本发明的一种用于建筑消防给水系统的可视化监管系统,包括:
[0074]
远程控制终端;
[0075]
分别设置于消防水池和消防水箱上的液位传感器,分别用于采集消防水池的液位以及采集消防水箱的液位;
[0076]
设置于消防泵上的振动传感器,用于采集消防泵的振动数据;
[0077]
阀门监测仪,所述阀门检测仪4用于监测建筑消防给水系统中各个阀门的开关状态,包括:建筑的每层支管路上的信号阀的开关状态,建筑的总管路上的信号阀的开关状态,以及设置于消防水池输出管路上的闸阀的开关状态;
[0078]
分别设置于建筑的每层支管路和总管路上的压力传感器,分别用于采集每层支管路中的水压以及采集总管路中的水压;
[0079]
分别设置于建筑的每层支管路上的流量传感器,分别用于采集建筑的每层支管路中水流的流速;
[0080]
其中,液位传感器、振动传感器、阀门监测仪、压力传感器、流量传感器均带有无线通讯功能,分别与远程控制终端进行无线通讯连接;
[0081]
远程控制终端分别接收液位传感器、振动传感器、阀门监测仪、压力传感器、流量传感器所采集的数据,并根据所接收的数据,对该建筑消防给水系统进行可视化监管。
[0082]
远程控制终端还与建筑消防给水系统中的消防泵、报警阀、水流指示器、阀门、末端试水装置进行无线通讯连接,建筑消防给水系统中的消防泵、报警阀、水流指示器、阀门、末端试水装置也均带有无线通讯功能,远程控制终端分别接收消防泵、报警阀、水流指示器、阀门的运行信息,以及用于对末端试水装置的开启和关闭进行控制。
[0083]
由图3所示,基于本发明的可视化监管系统,提供一种用于建筑消防给水系统的可视化监管方法,包括以下步骤:
[0084]
s1,确定建筑消防给水系统中的设备,设备之间通过管路连接,根据设备的连接关系,构建建筑消防给水系统的拓扑图以及该拓扑图的关系矩阵;其中,用图标表示设备,用有向线段表示管路,有向线段的方向即表示管路内的水流方向,并将设备的地理位置、运行信息、设备基本信息作为对应的设备的属性值。
[0085]
建筑消防给水系统中包括系统设备和管路连接设备,系统设备包括:消防水池、消防水箱、消防泵、报警阀、水流指示器、阀门、末端试水装置。管路连接设备如弯头、三通等。在建筑消防给水系统的拓扑图中,用矩形图标表示系统设备,用圆形图标表示管路连接设备。建筑消防给水系统的拓扑图中,矩形图标的位置用四至坐标即{left,top,right,bottom}表示,圆形图标的位置用该圆形图标的最小外接矩形的四至坐标表示;有向线段的位置用顶点和终点的坐标表示。
[0086]
本实施例中,以建筑消防给水系统某一支管路为例,建筑消防给水系统的部分拓扑图由图5所示,其中,矩形图标1表示消防水箱,矩形图标2表示消防泵,矩形图标3表示消防水池,矩形图标4表示报警阀,矩形图标5表示信号阀,矩形图标6表示水流指示器,矩形图标7表示末端试水装置,圆形图标8表示弯头,圆形图标9表示三通,圆形图标10表示弯头。
[0087]
以矩形图标1、圆形图标8、有向线段line(1,8)为例:
[0088]
矩形图标1对应的系统设备为消防水箱,矩形图标1的位置表示为:
[0089]
1={l1,t1,r1,b1};其中,l1为矩形图标1的左边界与y轴之间的距离,t1为矩形图标1的上边界与与x轴之间的距离,r1为矩形图标1的右边界与y轴之间的距离,b1为矩形图标1的下边界与与x轴之间的距离。
[0090]
圆形图标8对应的管路连接设备为弯头,圆形图标8的位置表示为:
[0091]
8={l8,t8,r8,b8};其中,l8为圆形图标8的最小外接矩形的左边界与y轴之间的距离,t8为圆形图标8的最小外接矩形的上边界与与x轴之间的距离,r8为圆形图标8的最小外接矩形的右边界与y轴之间的距离,b8为圆形图标8的最小外接矩形的下边界与与x轴之间的距离。
[0092]
有向线段line(1,8)对应为消防水箱与弯头之间的连接管路,有向线段line(1,8)的起点为矩形图标1即消防水箱,终点为圆形图标8即弯头,即管路内的水流方向为从消防水箱流至弯头,有向线段line(1,8)的位置表示为:
[0093]
line(1,8)={(x1,y1),(x8,y8)};其中,(x1,y1)为起点的坐标,即矩形图标1的中心位置坐标;(x8,y8)为终点的坐标,即圆形图标8的中心位置坐标。
[0094]
根据建筑消防给水系统的拓扑图中有向线段与图标的位置关系,确定各个图标即各个设备之间的连接关系,建立拓扑图的关系矩阵z,
[0095]
z=[z
i,j
],i=1,2,3
…
,j=1,2,3
…
;
[0096]
其中,i表示拓扑图中的第i个图标,j表示拓扑图中的第j个图标;
[0097]zi,j
表示以图标i为起点,图标j为终点,图标i与图标j之间的连接关系;
[0098]zi,j
的取值为0或1;其中,z
i,j
=1表示以图标i为起点,图标j为终点,图标i与图标j之间相连接;z
i,j
=0表示以图标i为起点,图标j为终点,图标i与图标j之间不相连接。
[0099]
以有向线段line(1,8)、图标1、图标8为例:
[0100]
若x1》=l1且x1《=r1且y1》=b1且y1《=t1且x8》=l8且x8《=r8且y8》=b8且y8《=t8;则以图标1为起点,图标8为终点,图标1和图标8之间相连接,即图标1和图标8的连接关系为1,即z
1,8
=1;否则,以图标1为起点,图标8为终点,图标1和图标8之间不相连接,即图标1和图标8的连接关系为0,即z
1,8
=0。
[0101]
根据图5所示的建筑消防给水系统的拓扑图,得到该拓扑图的关系矩阵如下表1所示:
[0102][0103][0104]
表1
[0105]
表1中,列中的图标为起点,行中的图标为终点。
[0106]
以该关系矩阵即表1为基础,选取任意图标,即可得到以该图标为起点的下游路线,以及以该图标为终点的上游路线。
[0107]
以图标4为例,以该图标4为起点,寻找下游路线,具体方式如下所示:
[0108]
从表1中,寻找以图标4为起点且连接关系为1的终点图标,即图标10;以图标10为起点,寻找以图标10为起点且连接关系为1的终点图标,即图标5;以图标5为起点,寻找以图标5为起点且连接关系为1的终点图标,即图标6;以图标6为起点,寻找以图标6为起点且连接关系为1的终点图标,即图标7;以图标7为起点,寻找以图标7为起点且连接关系为1的终点图标,此时,以图标7为起点没有连接关系为1的终点图标,则图标7即为图标4的下游路线的总终点;最终,得到图标4的下游路线为:4
→
10
→5→6→
7。
[0109]
以图标4为例,以该图标4为终点,寻找上游路线,具体方式如下所示:
[0110]
从表1中,寻找以图标4为终点且连接关系为1的起点图标,即图标9;以图标9为终点,寻找以图标9为终点且连接关系为1的起点图标,包括图标2和图标8,即表示有两条上游路线。分别以图标2和图标8为终点:一方面,寻找以图标2为终点且连接关系为1的起点图标,即图标3;以图标3为终点,寻找以图标3为终点且连接关系为1的起点图标,此时,以图标3为终点没有连接关系为1的起点图标,则图标3即为图标4的该条上游路线的总终点;最终,得到图标4的该条上游路线为:3
→2→9→
4。另一方面,寻找以图标8为终点且连接关系为1的起点图标,即图标1;以图标1为终点,寻找以图标1为终点且连接关系为1的起点图标,此时,以图标1为终点没有连接关系为1的起点图标,则图标1即为图标4的该条上游路线的总终点;最终,得到图标4的该条上游路线为:1
→8→9→
4。
[0111]
s2,确定建筑消防给水系统中的监测装置,确定各个监测装置的监测对象,监测对象即为建筑消防给水系统中的设备或管路。
[0112]
由图2所示,建筑消防给水系统中的监测装置即为:液位传感器、振动传感器、阀门监测仪、压力传感器、流量传感器。
[0113]
本实施例中,
[0114]
分别设置于消防水池和消防水箱上的液位传感器,其监测对象即分别为消防水池和消防水箱,监测数据即分别为消防水池和消防水箱的液位;
[0115]
设置于消防泵上的振动传感器,其监测对象即为消防泵,监测数据即为消防泵的振动数据;
[0116]
阀门监测仪的监测对象即为建筑消防给水系统中各个阀门,监测数据即为建筑消防给水系统中各个阀门的开关状态;
[0117]
分别设置于建筑的每层支管路和总管路上的压力传感器,其监测对象即分别为建筑的每层支管路和总管路,监测数据即分别为每层支管路中的水压以及总管路中的水压;
[0118]
分别设置于建筑的每层支管路上的流量传感器,其监测对象即分别为建筑的每层支管路,监测数据即分别为建筑的每层支管路中水流的流速。
[0119]
s3,在建筑消防给水系统的拓扑图中,将监测装置与对应的监测对象即设备或管路进行关联,将监测装置的监测数据也作为对应的设备或管路的属性值。
[0120]
s4,远程控制终端分别获取各个监测装置的监测数据,根据各个监测装置的监测数据进行实时监控,判断是否有设备发生异常,在建筑消防给水系统的拓扑图中,对发生异常的设备进行标注,例如,对发生异常的设备标红,以及展示发生异常的设备的地理位置。
[0121]
s5,从建筑消防给水系统的拓扑图中,确定发生异常的设备所对应的图标;在拓扑图的关系矩阵中,以该图标为起点和终点,查找以该图标为起点的下游路线以及以该图标为终点的上游路线,确定该设备的上下游设备和上下游管路,并分析该设备发生异常的影响和原因。
[0122]
查找以该图标为起点的下游路线,具体过程如下所示:
[0123]
在拓扑图的关系矩阵中,寻找以该图标为起点且连接关系为1的图标,即第一终点图标;以第一终点图标为起点,寻找以第一终点图标为起点且连接关系为1的图标,即第二终点图标;按照该方式继续查找,直至以第n终点图标为起点时没有连接关系为1的图标,则表示该第n终点图标即为该图标的下游路线的总终点,得到该图标的下游设备即为第一终点图标、第二终点图标、
…
第n终点图标所对应的设备;下游管路即为第一终点图标、第二终
点图标、
…
第n终点图标所对应设备之间的连接管路;
[0124]
查找以该图标为终点的上游路线,具体过程如下所示:
[0125]
在拓扑图的关系矩阵中,寻找以该图标为终点且连接关系为1的图标,即第一起点图标;以第一起点图标为终点,寻找以第一起点图标为终点且连接关系为1的图标,即第二起点图标;按照该方式继续查找,直至以第n起点图标为起点时没有连接关系为1的图标,则表示该第m起点图标即为该图标的上游路线的总起点,得到该图标的上游设备即为第m起点图标、第二起点图标、
…
第一起点图标所对应的设备;下游管路即为第m起点图标、第二起点图标、
…
第一起点图标所对应设备之间的连接管路。
[0126]
以水流指示器发生异常为例,水流指示器在建筑消防给水系统的拓扑图中对应图标6:
[0127]
以该图标6为起点,寻找下游路线,具体方式如下所示:
[0128]
从表1中,寻找以图标6为起点且连接关系为1的终点图标,即图标7;以图标7为起点,寻找以图标7为起点且连接关系为1的终点图标,此时,以图标7为起点没有连接关系为1的终点图标,则图标7即为图标6的下游路线的总终点;最终,得到图标6的下游路线为:6
→
7;即水流指示器的下游设备即为末端试水装置7,下游管路即为有向线段6
→
7;
[0129]
以该图标6为终点,寻找上游路线,具体方式如下所示:
[0130]
从表1中,寻找以图标6为终点且连接关系为1的起点图标,即图标5;以图标5为终点,寻找以图标5为终点且连接关系为1的起点图标,即图标10;寻找以图标10为终点且连接关系为1的起点图标,即图标4;以图标4为终点,寻找以图标4为终点且连接关系为1的起点图标,即图标9;以图标9为终点,寻找以图标9为终点且连接关系为1的起点图标,包括图标2和图标8,即表示有两条上游路线;分别以图标2和图标8为终点:
[0131]
一方面,寻找以图标2为终点且连接关系为1的起点图标,即图标3;以图标3为终点,寻找以图标3为终点且连接关系为1的起点图标,此时,以图标3为终点没有连接关系为1的起点图标,则图标3即为图标4的该条上游路线的总终点;最终,得到图标6的该条上游路线为:3
→2→9→4→
10
→5→
6;该条上游路线中,水流指示器的上游设备即包括:消防水池、消防泵、三通、报警阀、弯头、信号阀。
[0132]
另一方面,寻找以图标8为终点且连接关系为1的起点图标,即图标1;以图标1为终点,寻找以图标1为终点且连接关系为1的起点图标,此时,以图标1为终点没有连接关系为1的起点图标,则图标1即为图标4的该条上游路线的总终点;最终,得到图标6的该条上游路线为:1
→8→9→4→
10
→5→
6;该条上游路线中,水流指示器的上游设备即包括:消防水箱、弯头、三通、报警阀、弯头、信号阀。
[0133]
步骤s5中,对发生异常的设备分析异常的影响和原因,具体如下所示:
[0134]
报警阀是建筑消防给水系统中接通或切断水源,并启动报警器的设备,是自动喷水灭火系统中至关重要的组件,当喷淋等设备开始工作后,报警阀会接通水源并报警。因此,若报警阀不能正常工作,则会导致其负责的区域的自喷淋系统瘫痪。大多情况下,一个建筑消防给水系统由多个报警阀构成,一个报警阀负责一栋楼或一栋楼的部分楼层,如何,快速确定各报警阀的负责区域,定位影响范围及下游设备,在日常维保工作中也十分重要。
[0135]
当报警阀发生异常时,则基于建筑消防给水系统的拓扑图,按管路连接关系及水流流向,以报警阀为起点,以水流流出方向沿管路向下溯源,找出报警阀的所有下游管路和
下游设备,即可确定报警阀的负责区域,并直观的呈现出报警阀的负责区域,报警阀的所有下游管路和下游设备均受该报警阀的异常影响,将报警阀的所有下游管路和下游设备均进行标注。
[0136]
水流指示器用于监控管路内的水流信号,报告火灾发生的位置。
[0137]
当水流指示器发生异常时,则基于建筑消防给水系统的拓扑图,按管路连接关系及水流流向,以水流指示器为起点,以水流流出方向沿管路向下溯源,依次查看水流指示器的下游设备是否异常,直至发现正常的下游设备,则停止向下溯源,该正常的下游设备即为下游异常结点;同时,还以水流指示器为终点,以水流流入方向沿管路向上溯源,依次查看水流指示器的上游设备是否异常,直至发现正常的上游设备,则停止向上溯源,该正常的上游设备即为上游异常结点;该下游异常结点和上游异常节点之间的所有管路和设备均受该水流指示器的异常影响,将该下游异常结点和上游异常节点之间的所有管路和设备均进行标注,便于定位排查。
[0138]
用户接到水流指示器发生异常的信号后,可通过建筑消防给水系统的拓扑图查看受该水流指示器的异常影响的管路和设备,基于受影响的管路和设备的地理位置属性,桥接室内gis平面图做到快速精确定位,到达现场确认火灾是否真的发生,并采取措施。
[0139]
当末端试水装置发生异常时,则基于建筑消防给水系统的拓扑图,按管路连接关系及水流流向,以末端试水装置为终点,以水流流入方向沿管路向上溯源,依次查看末端试水装置的上游设备是否异常,直至发现正常的上游设备,则停止向上溯源,该正常的上游设备与末端试水装置之间的所有管路和设备均为该末端试水装置异常的可能原因,将该正常的上游设备与末端试水装置之间的所有管路和设备均进行标注,便于定位排查。
[0140]
当消防泵发生异常时,则基于建筑消防给水系统的拓扑图,按管路连接关系及水流流向,以消防泵为起点,以水流流出方向沿管路向下溯源,找出消防泵的所有下游管路和下游设备,即可确定消防泵的负责区域,并直观的呈现出消防泵的负责区域,消防泵的所有下游管路和下游设备均受该消防泵的异常影响,将消防泵的所有下游管路和下游设备均进行标注。
[0141]
本发明中,当末端试水装置、水流指示器、报警阀、消防泵的运行时,远程控制终端收到末端试水装置、水流指示器、报警阀、消防泵的运行信号后,还可以在建筑消防给水系统的拓扑图中,自动展现消防供水路径,模拟水流信息,并监控相关设备。
[0142]
本发明中,还在建筑消防给水系统的拓扑图中,将建筑的每层室内gis平面地图与该层的设备和管路的地理位置进行关联。远程控制终端内设有gps定位模块,通过开启gps定位获取远程控制终端的当前位置,即相当于获取用户的当前位置,根据室内gis平面地图,远程控制终端可以自动规划合理的可达线路并导航。
[0143]
由图4所示,本发明的一种用于建筑消防给水系统的可视化监管系统的系统架构划分为:档案子系统、可视化引擎子系统。
[0144]
档案子系统用于存储设备的运行信息、设备基本信息、地理位置,以及监测装置的监测数据,以及建筑的室内gis平面地图。
[0145]
可视化引擎子系统与档案子系统之间进行数据传输。
[0146]
可视化引擎子系统用于构建建筑消防给水系统的拓扑图,判断设备是否发生异常并展示异常设备,分析异常的原因或影响并进行展示,以及用于规划设备可达线路并进行
导航。
[0147]
本发明中,步骤s4中,根据各个监测装置的监测数据进行实时监控,判断是否有设备发生异常,具体如下所示:
[0148]
远程控制终端判断消防泵是否发生异常,包括以下步骤:
[0149]
s11,远程控制终端通过设置于消防泵上的振动传感器,获取消防泵的实际振动数据v;振动数据是指消防泵在某频率下振动的振幅数据;
[0150]
s12,远程控制终端中预先存储有消防泵在该频率下正常运行时的样本振动数据v
′
;将消防泵的实际振动数据v与样本振动数据v
′
进行比较,若v
′‑
δv≤v≤v
′
+δv,则表示消防泵的振动状态为正常;否则表示消防泵的振动状态为异常,即消防泵为异常,并对该异常进行报警;
[0151]
δv为设定的波动范围。
[0152]
本实施例中,消防泵在10k8z频率下振动,因此,在实际振动数据v和样本振动数据v
′
比较时,可以分别将实际振动数据v和样本振动数据v
′
分成1万份,每1份即对应一个时间点,分别将实际振动数据v中每个时间点下的实际振幅与样本振动数据v
′
中的对应时间点下的样本振幅进行比较,若第t个时间点下,v
′
(t)-δv≤v(t)≤v
′
(t)+δv,则表示第t个时间点下的实际振幅v(t)在正常波动范围内,若每个时间点下的实际振幅均在正常范围内,则表示消防泵的振动状态正常;
[0153]
v(t)表示实际振动数据v中第t个时间点下的实际振幅,v
′
(t)表示样本振动数据v
′
中的第t个时间点下的样本振幅;δv为设定的波动阈值,δv取值为1mm。
[0154]
远程控制终端判断支管路上的水流指示器是否发生异常,包括以下步骤:
[0155]
s21,远程控制终端通过设置于每层支管路上的流量传感器,分别获取每层支管路中水流的流速值,建立管网流速集f,f=[fm|m=1,2,
…
m],fm为建筑的第m层支管路中水流的流速值;
[0156]
s22,远程控制终端根据管网流速集f,将每层支管路中水流的流速值与每层支管路上水流指示器所需的开启流速进行比较,若第m层支管路中水流的流速值fm大于该第m层支管路上水流指示器所需的开启流速,则表示该第m层支管路上的水流指示器为正常;否则,表示该第m层支管路上的水流指示器为异常,并对该异常进行报警。
[0157]
远程控制终端判断报警阀是否发生异常,包括以下步骤:
[0158]
s31,远程控制终端通过设置于总管路上的压力传感器,获取总管路中的动水压值e;
[0159]
s32,远程控制终端将总管路中的动水压值e与报警阀的开启压力进行比较,若总管路中的动水压值e大于报警阀的开启压力,则表示报警阀为正常;否则,表示该报警阀为异常,并对该异常进行报警。
[0160]
远程控制终端判断支管路末端的末端试水装置是否发生异常,包括以下步骤:
[0161]
s41,远程控制终端通过设置于消防水箱上的液位传感器,获取消防水箱的液位值b1;其中,消防水箱设置于建筑顶部,消防水箱的箱底相对地方的高度为h
b1
;
[0162]
s42,远程控制终端7依次开启每层支管路上的末端试水装置,每层支管路进行末端放水;
[0163]
其中,建筑共有m层,建筑的第m层支管路即为建筑的最高层支管路;
[0164]
s43,在消防泵未启动时,即采用消防水箱中的水作为水源,远程控制终端通过设置于最高层支管路即第m层支管路上的流量传感器,获取消防泵未启动时最高层即第m层支管路中水流的流速值f
′m;
[0165]
远程控制终端根据消防水箱的液位值b1、消防水箱的箱底相对地面的高度h
b1
、第m层支管路相对地面的高度hm,以及根据消防泵未启动时第m层支管路中水流的流速值f
′m,计算支管路末端放水时的单位压力流速的阈值ts:
[0166]
ts=(b1+h
b1-hm)
×
9.8/f
′m;
[0167]
s44,消防泵启动后,即采用消防水池中的水作为水源,远程控制终端通过阀门监测仪,分别获取每层支管路上的信号阀的开关状态,建立阀门状态集c,c=[cm|m=1,2,
…
m],cm表示第m个信号阀的开关状态,cm的取值为0或1,cm=0表示第m个信号阀为关闭状态;cm=1表示第m个信号阀为打开状态;
[0168]
s45,远程控制终端4通过设置于每层支管路上的压力传感器,分别获取每层支管路末端的动水压值,建立管网动水压集e,e=[em|m=1,2,
…
m],em为建筑的第m层支管路的动水压值;
[0169]
s46,远程控制终端通过设置于每层支管路上的流量传感器,分别获取每层支管路中水流的流速值,建立管网流速集f,f=[fm|m=1,2,
…
m],fm为建筑的第m层支管路中水流的流速值;
[0170]
s47,远程控制终端根据消防泵的振动状态,阀门状态集c、管网动水压集e、管网流速集f,计算每层支管路末端放水时的单位压力流速;
[0171]
其中,建筑的第m层支管路末端放水时的单位压力流速sm为:
[0172][0173]vz
表示消防泵的振动状态,vz=1表示消防泵的振动状态为正常,vz=0表示消防泵的振动状态为正常;
[0174]
若第m层支管路末端放水时的单位压力流速sm大于支管路末端放水时的单位压力流速的阈值ts,则表示该第m层支管路末端放水正常,即该第m层支管路末端的末端试水装置为正常;否则,表示该第m层支管路末端放水异常,即该第m层支管路末端的末端试水装置为异常,并对该异常进行报警。
[0175]
远程控制终端判断消防水箱和消防水池是否发生异常,包括以下步骤:
[0176]
s51,远程控制终端通过设置于消防水池上的液位传感器和设置于消防水箱上的液位传感器,分别获取消防水箱的液位值b1和消防水池的液位值b2,建立液位集b,b=[b1,b2],b1为消防水箱的液位值,b2为消防水池的液位值;
[0177]
s52,远程控制终端分别判断消防水箱的液位值b1和消防水池的液位值b2是否低于设定的对应阈值,若消防水箱的液位值b1或消防水池的液位值b2不低于设定的对应阈值,则表示消防水箱或消防水池为正常;若消防水箱的液位值b1和消防水池的液位值b2低于设定的对应阈值,则表示消防水箱或消防水池为异常,并对该异常进行报警。
[0178]
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1