一种智能越障水帘降温式消防救援机器人的制作方法
1.本发明涉及消防救援机器人技术领域,尤其涉及一种智能越障水帘降温式消防救援机器人。
背景技术:
2.随着高楼大厦等建筑拔地而起,火灾隐患与消防问题正日益突出。消防救援主要包括火灾现场的人员救援,重要设施设备、文物的抢救,重要财产的安全保卫与抢救,扑灭火灾等,目的是降低火灾造成的破坏程度,减少人员伤亡和财产损失。
3.在浓烟中,被困人员很容易迷失方向,无法找到逃生出口。火场温度过高,被困人员即使知道逃生出口,也有可能无法被火苗或高温困住,无法前往。另外,建筑结构与家具受到火势燃烧影响,空间结构与建筑正常结构相比已经发生变化,此时消防员如果根据过时的建筑设计图进入火场,极有可能遇到地图错误的情况。
4.申请号为202011579376.4的中国专利中公开了一种带有应急避障结构的智慧消防机器人及消防系统,该方案具有应急壁障、清理火场和自主灭火功能,但是无法直接救援被困人员,也没有局部降温装置。申请号为202011309863.9的中国专利中公开了一种消防救援机器人,可以将被困人员保护在车内带出火场,但是没有地图重构功能以及爬楼梯能力。
5.因此,需要一种新型消防救援机器人,具备包括但不限于爬楼梯的越障功能,具备地图重构功能,具备局部降温功能,才能更好的完成救援任务,减少人员和财产的损失。
技术实现要素:
6.针对上述背景技术中提出的技术的问题,本发明的目的在于提供一种智能越障水帘降温式消防救援机器人,包括内壳体、外壳体、壳体底板、多根伸缩杆,还包括由所述内壳体、外壳体、壳体底板合围而成的蓄水腔,以及安装于外壳体的激光点云传感器,控制器;
7.所述内壳体和所述外壳体通过连接柱固定连接,所述内壳体底部设置有多根支撑杆外杆和嵌套于所述支撑杆外杆内的支撑杆内杆,所述支撑杆内杆可升降,所述支撑杆内杆的一端设置有滚轮;
8.所述伸缩杆设置于所述蓄水腔内,一端连接于所述外壳体内表面,另一端连接于所述壳体底板,所述伸缩杆的伸缩可带动所述壳体底板的下降和上升;
9.所述激光点云传感器分布在外壳体四周,消防救援机器人前进时,四周的激光点云会将采集的信息传递至所述控制器;
10.所述控制器根据接收到的信息绘制火场内地图,完成地图重构并实时传到火场外,并根据重构地图信息发出控制指令;
11.所述控制器控制所述伸缩杆的伸缩、支撑杆内杆的升降、滚轮的移动和转动。
12.进一步地,所述伸缩杆为两根,对称设置;所述支撑杆内杆和所述支撑杆外杆分别有六根,两根为一组等分设置于所述内壳体底部。
13.进一步地,所述外壳体的上表面靠近壳体边缘环向设置有水帘喷头。
14.进一步地,所述支撑杆内杆可沿轴向360
°
旋转,从而带动与之相连的滚轮360
°
旋转。
15.进一步地,还包括灭火喷头,所述灭火喷头设置于所述外壳体的一侧。
16.进一步地,所述伸缩杆内还设置有涡轮蜗杆减速器。
17.进一步地,还包括电池,所述电池给所述控制器、激光点云传感器、伸缩杆、支撑杆内杆、滚轮提供电能,所述控制器和电池设置于所述内壳体底部。
18.本发明相对于现有技术的优点:
19.1、具有智能越障能力,机动性强,对于火场内的台阶、裂缝、斜面等破坏场景均具有良好的通过性;
20.2、水帘喷头喷水既可对局部降温,又可以尽可能保障被救人员不受烟雾与高温影响,提高了救援能力;
21.3、大部分工作部件设置在内壳体底部,且蓄水腔中的水对其有隔热和降温作用,降低了工作部件的故障率;
22.4、激光点云传感器可进行实时地图重构,可以重建复杂的火场地图,帮助消防人员突进与撤离,激光点云可以不受烟雾与火焰的干扰,可靠性高,同时可以根据自己重构的地图智能规划路径,寻找逃生出口。
附图说明
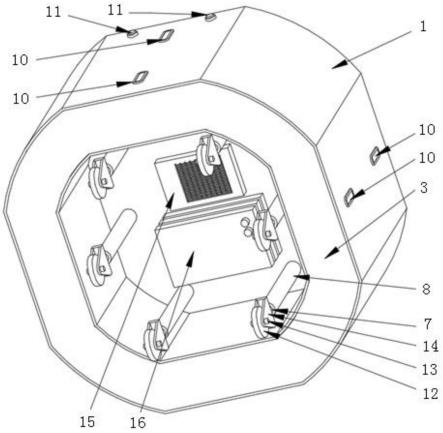
23.图1为本发明提供的智能越障水帘降温式消防救援机器人结构示意图;
24.图2为本发明提供的智能越障水帘降温式消防救援机器人的半剖视图;
25.图3为本发明提供的智能越障水帘降温式消防救援机器人底部结构示意图;
26.图4为本发明提供的智能越障水帘降温式消防救援机器人的仰视图;
27.图5为本发明跨越楼梯障碍时,支撑杆内杆全部伸出准备跨越台阶的示意图;
28.图6为本发明跨越楼梯障碍时,前轮收缩跨越示意图;
29.图7为本发明跨越楼梯障碍时,前轮、中轮收缩跨越示意图;
30.图8为本发明完成跨越楼梯障碍后,恢复正常前进时的示意图。
31.其中,1-外壳体、2-内壳体、3-壳体底板、4-蓄水腔、5-连接柱、6-伸缩杆、7-支撑杆内杆、8-支撑杆外杆、9-水帘喷头、10-激光点云传感器、11-灭火喷头、12-滚轮、13-轮轴、14-轮架、15-控制器、16-电池。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明保护的范围。
33.如图1、图2所示,本发明提供的一种智能越障水帘降温式消防救援机器人,包括内壳体、外壳体、壳体底板、多根伸缩杆,还包括由所述内壳体、外壳体、壳体底板合围而成的蓄水腔,以及安装于外壳体的激光点云传感器,控制器,为提高消防救援机器人的通过能
力,内壳体和外壳体均采用圆形结构,且均为耐高温材料制成,具有耐高压、坚固可靠的优点,在本发明中作为主体结构,起到支撑与保护的作用;
34.所述内壳体和所述外壳体通过连接柱固定连接,所述内壳体底部设置有多根支撑杆外杆和嵌套于所述支撑杆外杆内的支撑杆内杆,所述支撑杆内杆可升降,所述支撑杆内杆的一端设置有滚轮,滚轮上的轮轴通过轮架与支撑杆内杆连接;
35.所述伸缩杆设置于所述蓄水腔内,一端连接于所述外壳体内表面,另一端连接于所述壳体底板,所述伸缩杆的伸缩可带动所述壳体底板的下降和上升;
36.所述激光点云传感器分布在外壳体四周,消防救援机器人前进时,四周的激光点云会将采集的信息传递至所述控制器,为了保护激光点云传感器在高温下仍可正常工作,在激光点云传感器外部设置有耐高温保护壳;
37.所述控制器根据接收到的信息绘制火场内地图,完成地图重构并实时传到火场外,并根据重构地图信息发出控制指令;
38.所述控制器控制所述伸缩杆的伸缩、支撑杆内杆的升降、滚轮的移动和转动,伸缩杆、支撑杆内杆、滚轮均由内置的驱动机构来提供动力。
39.作为本发明的一种优选方案,所述伸缩杆为两根,对称设置;如图5-图8所示,所述支撑杆内杆和所述支撑杆外杆分别有六根,两根为一组等分设置于所述内壳体底部。当遇到台阶时,所有支撑杆内杆伸长,将消防救援机器人抬升;消防救援机器人继续前进,前方两根支撑杆内杆收缩,首先驶到台阶上;消防救援机器人继续前进,中部两根支撑杆内杆收缩,随着机器人前进方向行驶到台阶上;消防救援机器人继续前进,后方两根支撑杆内杆收缩,随着消防救援机器人前进方向行驶到台阶上,整个跨越台阶动作完成。
40.作为本发明的一种优选方案,所述外壳体的上表面靠近壳体边缘环向设置有水帘喷头,当伸缩杆缩回时,壳体底板被向上提升,从而压缩蓄水腔内的水,使水通过水帘喷头均匀喷出形成一圈水帘,可起到降温和吸附有毒烟雾的功能,对乘坐在外壳体上的人员起到了很好的保护作用。
41.如图4所示,作为本发明的一种优选方案,所述支撑杆内杆可沿轴向360
°
旋转,从而带动与之相连的滚轮360
°
旋转,当消防救援机器人需要做平移、原地转向等机动动作时,滚轮可以旋转到合适的角度,大大增强了消防救援机器人的通过能力。
42.作为本发明的一种优选方案,还包括灭火喷头,所述灭火喷头设置于所述外壳体的一侧,从喷头可以喷出蓄水腔中的水,起到扑灭前方火情的作用。
43.作为本发明的一种优选方案,所述伸缩杆内还设置有涡轮蜗杆减速器,与内置其中的驱动电机搭配使用,具备动力来源简单、减速比大、可随时自锁的特点。
44.如图3所示,还包括电池,所述电池给所述控制器、激光点云传感器、伸缩杆、支撑杆内杆、滚轮提供电能,所述控制器和电池设置于所述内壳体底部,远离火源,最大程度地保持生存力,不受火源干扰。
45.本发明实施例一种智能越障水帘降温式消防救援机器人的实施原理为:
46.消防救援机器人行驶到火场入口,原地旋转一周或多周,使用激光点云传感器建立初始坐标与初始地图信息,自动寻找到合适的入口,准备进入火场,通过调整滚轮方向来驱动消防救援机器人进入火场,激光点云传感器随着机器人行驶实时扫描周围地理环境,更新地图库并回传至火场外,自动规划最优路径并逐一房间检查是否有被困人员,当接到
被困人员后,水帘会持续喷出水雾用来降温,保障被困人员不受高温和烟雾影响,然后根据自主建立的地图信息规划出最短离开路径,准备离开火场,移动过程中若遇到台阶或斜面,机器人通过伸缩杆的伸缩动作越过障碍,并始终保持外壳体水平,便于被困人员安全平稳地坐在外壳体上表面。
47.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1