一种海洋平台自动泡沫灭火车的快速精准灭火方法与流程
1.本发明涉及快速精准灭火方法,尤其涉及海洋平台内自动泡沫灭火车的快速精准灭火方法。
背景技术:
2.fpso海洋平台内所开采的属于易燃易爆的天然气,在海洋平台上对火灾的防范等级要求较高,一旦失火后,起火区域较为危险,因此精确的找到着火点位置,并快速的进行灭火至关重要。现阶段对于海洋平台的灭火方法所采用的是联动灭火的方式,存在一个着火点后,整个海洋平台的消防系统便会启动,但现有系统不能快速精准的发现着火点并迅速进行灭火。
技术实现要素:
3.本发明的目的在于克服已有技术的不足,提供一种海洋平台自动泡沫灭火车的快速精准灭火方法。该方法通过对起火点的精确定位,自动泡沫灭火车轨迹的最短路径和泡沫枪喷射角度的计算,实现精准定位,快速灭火,满足不同起火点的灭火要求。
4.为实现上述目的,本发明采用的技术方案是:
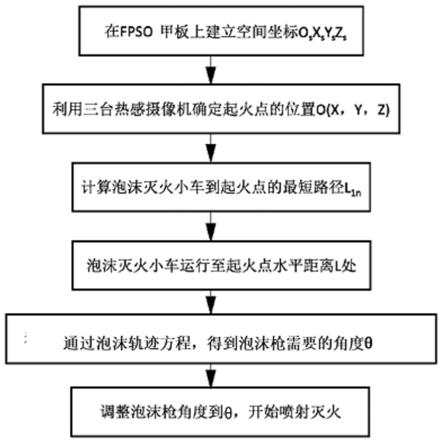
5.本发明的一种海洋平台自动泡沫灭火车的快速精准灭火方法,包括以下步骤:
6.步骤一、在fpso甲板上任选一点os建立空间坐标系osx
syszs
,在甲板水平面上选择任意方向作为xs轴正方向,在同一平面上选择一个与xs轴垂直的方向作为ys轴正方向,zs轴与 xs轴、ys轴垂直且垂直于甲板水平面向上为正方向;
7.步骤二、在fpso甲板上安装三台热感摄像机,并得到三台热感摄像机镜头中心点的空间位置点坐标,将三个空间位置点坐标通过无线网输入到fpso总控制室的计算机中,在所述的计算机中安装有采用c++设计的路径规划模块;
8.步骤三、三台热感摄像机对fpso甲板进行扫描,扫描到起火位置后将起火位置定位在视野中心并生成图像,然后将图像传送至计算机,计算机采用路径规划模块对图像处理后得到每台热感摄像机的镜头中心点到起火点o的距离,经过计算得到起火点的位置坐标;
9.步骤四、将泡沫灭火车p的泡沫枪的喷射中心点初始位置处的坐标q0(x0,y0,z0)输入到计算机中,计算机通过路径规划模块规划出从q0点能够到达o点的所有拐点和拐点间的直接通行路段。设所有拐点加上q0、o点共n个点,从q0至o的各点记为s1、s2、
……
、 sn,各点间水平距离设为l
ij
,其中,i取1,2,3
……
n,j取1,2,3
……
n,若i点与j点可直接通行,则将l
ij
的值设定为i点到j点的水平距离,若i点与j点不可以直接通行,则将l
ij
的值设定为∞;建立u、v两个集合,初始时u集合里只有s1,v集合里有s2到sn;
10.步骤五、路径规划模块计算l
1j
,然后将所有l
1j
按从小到大排序,j∈v,将最小l
1j
的j 赋值到k,若有多个最小l
1j
,任选一个j赋值到k,并将sk从集合v中移到集合u中;
11.步骤六、比较l
1k
+l
kj
与l
1j
的大小,j∈v,若l
1k
+l
kj
《l
1j
,则令l
1j
=l
1k
+l
kj
,否则,l
1j
的
值不变,将所有l
1j
按从小到大排序,j∈v,将最小的l
ij
的j赋值到k,若有多个最小l
1j
,任选一个j赋值到k,并将sk从集合v中移到集合u中;
12.步骤七、重复步骤六,直至集合v中不再有点,结束计算,此时l
1n
为最短路径;
13.步骤八、计算机采用路径规划模块计算出最短路径后,将最短路径通过无线网输出到泡沫灭火车的控制装置中,控制泡沫灭火车沿最短路径l
1n
运行至距离起火点水平距离l处控制泡沫灭火车停止;
14.步骤九、过泡沫灭火车的泡沫枪在停止状态下的喷射中心点q以及起火点o建一个平面直角坐标系qxz且平面直角坐标系qxz为垂直于甲板水平面的平面,其中q为坐标原点, x轴平行于甲板水平面,且由q向o为正方向,z轴垂直于x轴,且垂直于甲板向上为正方向。
15.步骤十、由牛顿第二定律,在平面直角坐标系qxz中建立单位质量的泡沫从泡沫枪在停止状态下的喷射中心点q喷出至起火点o的运动轨迹方程并求得泡沫枪的喷射角度θ值;
16.步骤十一、计算机输出控制信号到泡沫灭火车,将泡沫枪角度调整至θ,泡沫枪开始喷射,对着火点进行灭火。
17.与现有技术相比较,采用本发明的优点在于:本发明实现了海洋平台内自动泡沫灭火车的快速精准灭火,实现了精准定位起火点,快速到达灭火位置,精准喷射泡沫至起火点,满足不同起火点的灭火要求。
附图说明
18.图1为本发明自动泡沫灭火车的快速精准灭火方法的流程图;
19.图2为本发明确定起火点位置信息示意图;
20.图3为本发明自动泡沫灭火车地图信息最短轨迹计算(n=9)示意图;
21.图4为本发明泡沫喷射轨迹示意图。
具体实施方式
22.本发明一种海洋平台自动泡沫灭火车的快速精准灭火方法,包括以下步骤:
23.步骤一、在fpso甲板上任选一点os建立空间坐标系osx
syszs
,在甲板水平面上选择任意方向作为xs轴正方向,在同一平面上选择一个与xs轴垂直的方向作为ys轴正方向,zs轴与 xs轴、ys轴垂直且垂直于甲板水平面向上为正方向;
24.步骤二、在fpso甲板上安装三台热感摄像机(该热感摄像机市场有售),并得到三台热感摄像机镜头中心点的空间位置点坐标,分别记为a(x1,y1,z1),b(x2,y2,z2),c(x3, y3,z3),并将三个空间位置点坐标通过无线网输入到fpso总控制室的计算机中,在所述的计算机中安装有采用c++设计的路径规划模块;
25.步骤三、三台热感摄像机对fpso甲板进行扫描,扫描到起火位置后将起火位置定位在视野中心并生成图像,然后将图像传送至计算机,计算机采用路径规划模块对图像处理后得到每台热感摄像机的镜头中心点到起火点o的距离
△
l1、
△
l2、
△
l3,经过计算得到起火点的位置坐标o(x,y,z),可以采用解方程组得到起火点的位置o(x,y,z);
[0026][0027]
式中:x1、y1、z1分别指a点的xs轴、ys轴、zs轴的坐标;x2、y2、z2分别指b点的xs轴、ys轴、zs轴的坐标;x3、y3、z3分别指c点的xs轴、ys轴、zs轴的坐标;x、y、 z分别指起火点o的xs轴、ys轴、zs轴的坐标;
△
l1指a点到起火点o的距离;
△
l2指b 点到起火点o的距离;
△
l3指c点到起火点o的距离。
[0028]
步骤四、将泡沫灭火车p(可以采用现有的avg智能小车)的泡沫枪的喷射中心点初始位置处的坐标q0(x0,y0,z0)输入到计算机中,计算机通过路径规划模块(该软件采用c++ 编写)规划出从q0点能够到达o点的所有拐点和拐点间的直接通行路段。设所有拐点加上 q0、o点共n个点,从q0至o的各点记为s1、s2、
……
、sn,各点间水平距离设为l
ij
,其中,i取1,2,3
……
n,j取1,2,3
……
n,若i点与j点可直接通行,则将l
ij
的值设定为i 点到j点的水平距离,若i点与j点不可以直接通行,则将l
ij
的值设定为∞;建立u、v两个集合,初始时u集合里只有s1,v集合里有s2到sn;
[0029]
步骤五、路径规划模块计算l
1j
,然后将所有l
1j
按从小到大排序,j∈v,将最小l
1j
的j 赋值到k,若有多个最小l
1j
,任选一个j赋值到k,并将sk从集合v中移到集合u中;
[0030]
步骤六、比较l
1k
+l
kj
与l
1j
的大小,j∈v,若l
1k
+l
kj
《l
1j
,则令l
1j
=l
1k
+l
kj
,否则,l
1j
的值不变,将所有l
1j
按从小到大排序,j∈v,将最小的l
ij
的j赋值到k,若有多个最小l
1j
,任选一个j赋值到k,并将sk从集合v中移到集合u中;
[0031]
步骤七、重复步骤六,直至集合v中不再有点,结束计算,此时l
1n
为最短路径;
[0032]
下面举例说明从步骤四至步骤七的过程:
[0033]
步骤四、测量泡沫灭火车p的泡沫枪的喷射中心点位于初始位置处的坐标为q0(x0,y0, z0),已知步骤三得到的起火点的位置o(x,y,z)后,根据泡沫灭火车计算机上已经存储的地图信息(举例如图),选择出从q0点能够到达o点的所有拐点和拐点间的直接通行路段。设所有拐点加上q0、o点共n个点(如图,9个点,n=9),将o0看作1点(小车所在q0作为1点),o点看作n点(起火点o点是作为9点),各拐点看作2、3、4
…
n-1点,各点间水平距离设为l
ij
,表示i点到j点间的水平距离,其中,i取1,2,3
……
n,j取1,2,3
……ꢀ
n,若i点与j点可直接通行,则将l
ij
的值设定为i点到j点的水平距离,若i点与j点不可以直接通行,则将l
ij
的值设定为∞(像1,2点可以直接通行就是那个距离,如果不能直接通行,比如1,5点、2,8点,就把值设定为无穷,下表1为1点到其他点的值),引入u、v两个集合,初始时u集合里只有1点,v集合里有2点到n点的所有点;
[0034]
表1
[0035]
l
12
l
13
l
14
l
15
l
16
l
17
l
18
l
19
40100∞∞∞∞∞∞
[0036]
步骤五、所有l
1j
按从小到大排序,j∈v,(因为j取集合v里的数,所以将 l
12
.l
13
,l
14
,l
15
,l
16
,l
17
,l
18
,l
19
排列大小,即将表1中的值排列大小,最小的是l
12
),将最小l
1j
的j赋值到k,若有多个最小l
1j
,任选一个j赋值到k(最小的是l
12
,也就是j=2,赋值到k,即现在k=2),并将k点从集合v中移到集合u中(将k点移到u,即将2点移到u);
[0037]
步骤六、比较l
1k
+l
kj
与l
1j
的大小,j∈v,(之前k取2,比较l
12
+l
2j
与l
1j
如下表2),若
l
1k
+l
kj
《l
1j
,则令l
1j
=l
1k
+l
kj
,否则,l
1j
的值不变(如表2最后一行的结果),将所有l
1j
按从小到大排序,j∈v,将最小的l
ij
的j赋值到k(排序之后,最小的是l
15
,即现在k=5),若有多个最小l
1j
,任选一个j赋值到k,并将k点从集合v中移到集合u中(将5移入u);
[0038]
表2
[0039][0040][0041]
步骤七、重复步骤六,直至集合v中不再有点(直到所有点都移入u),结束计算,此时 l
1n
为最短路径;
[0042]
步骤八、计算机采用路径规划模块计算出最短路径后,将最短路径通过无线网输出到泡沫灭火车的控制装置中,控制泡沫灭火车沿最短路径l
1n
运行至距离起火点水平距离l处(自行设定)控制泡沫灭火车停止;
[0043]
步骤九、过泡沫灭火车的泡沫枪在停止状态下的喷射中心点q以及起火点o建一个平面直角坐标系qxz且平面直角坐标系qxz为垂直于甲板水平面的平面,其中q为坐标原点, x轴平行于甲板水平面,且由q向o为正方向,z轴垂直于x轴,且垂直于甲板向上为正方向。
[0044]
步骤十、由牛顿第二定律,在平面直角坐标系qxz中建立单位质量的泡沫从泡沫枪在停止状态下的喷射中心点q喷出至起火点o的运动轨迹方程,由下式计算:
[0045][0046]
将上式消去单位时间t,得到喷射泡沫在平面直角坐标系qxz中的轨迹方程z,然后将着火点o的x,z的值代入得到的轨迹方程中求得泡沫枪的喷射角度θ值:
[0047][0048]
式中,x,z分别代表着火点o点在平面坐标系qxz中的x轴,z轴坐标;v0代表泡沫枪喷头处的喷射速度(根据泡沫枪的型号设定);g取当地重力加速度;m代表单位时间的泡沫质量,由m=ρ
×qv
得到,ρ为所使用的泡沫密度,qv为单位时间喷射的泡沫的体积流量(根据泡沫枪的型号可以已知),θ为泡沫枪的喷射角度;k指空气阻力系数等于摩阻系数c
xf
和涡阻
系数c
xb
之和,即k=c
xf
+c
xb
,摩阻系数和涡阻系数与雷诺数re有关,由下式计算:
[0049][0050]
步骤十一、计算机输出控制信号到泡沫灭火车,将泡沫枪角度调整至θ,泡沫枪开始喷射,对着火点进行灭火。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1