一种无人机投射灭火弹瞄准系统及其方法
1.本发明涉及无人机灭火技术领域,尤其涉及一种无人机投射灭火弹瞄准系统及其方法。
背景技术:
2.负责易燃易爆或其他危险物品的军事库区 储存设施,大都占地面积大、人员数量少、值勤点位少、消防措施简单、安全管控难,且大都地处山区或边远地区、植被茂密,平时受技术安全管理、自然环境、人为因素的影响,时刻面临发生火灾、偷盗、燃爆、泄露等重大隐患风险,一旦发生这些事故,损失特别巨大,影响特别严重。目前此类库区安防手段主要是定点监控和人员巡逻,随着定点监控的现代化功能越来越多,在一定程度上减少了人员巡逻的压力,但对于较大库区,仍然存在一些问题:1)定点监控位置相对较为固定,监控会存在一定死角,监控距离的调整和采集图像的清晰度受到一定的限制。
3.2)大部分监控仅仅停留于监视,将图像传输给值班人员,很少或者基本没有现场处置险情和出现可疑人员的情形,随着监控数量的增多,值班人员的工作量也会成倍增长,犯错误的概率也就大大增加。
4.3)人员巡逻最显著的一个缺点是容易出现较长空档期,在这个空档期内很容易出现问题并不能及时处置,尤其是区域面积较大的库区。
5.当前我国很多军事仓库的共性问题是,由于人员大幅压缩,正常的昼夜人工巡检很难得到保证;而高效的安全防护措施更是薄弱,亟需在技术防范、智能防控上寻求突破,实现由静态固定设置、只具备图像摄取功能的安防系统向动态定期自动巡检、险情发现与处置一体智能安全防控方向转变。本课题就是针对当前仓库这种迫切需求,适应国家智能化、无人化装备发展趋势,研制一种集库区巡检、险情监测、实时报警、高效处置等功能于一体的仓库无人智能安全防控系统,大幅提高仓库自主防控能力。该系统能沿固定路径或自主规划,实现不间断的巡检,能够自动避障;能及时发现可疑人物,并根据储存图像进行自动识别与报警;能及时发现微弱火源,在自主判别为意外火源基础上发送信号至监控室或进行自主灭火处理。
6.无人机投射灭火弹的信号处理装置中有多种传感器和控制器,承担了目标识别,图像处理,数据分析等功能。火源隐患的位置可能随着现实环境的变化而发生改变,灭火弹的抛洒特性使其在运动至火源隐患上方时存在一个最佳的爆炸点实现灭火效率的最大化,由于灭火弹上无自动识别功能,所以需要通过无人机投射灭火弹来完成瞄准和发射。
技术实现要素:
7.本发明是针对现有技术所存在的不足,而提供了一种设备简单,在仅有位置数据的条件下,实现理想瞄准点的跟踪控制,消除实时瞄准点与理想瞄准点相对位置偏差、速度估计偏差、加速度估计偏差,满足冷发射传感器的控制需求。
8.为了实现上述目的,本发明提供了一种无人机投射灭火弹瞄准系统及其方法,所述无人机投射灭火弹瞄准系统包括飞行平台,所述飞行平台设置有火源目标跟踪控制器、灭火弹冷发射装置、火源目标识别器和无线信号收发装置,所述火源目标跟踪控制器信号连接所述灭火弹冷发射装置;所述火源目标识别器提供火源位置数据,所述火源目标识别器信号连接所述火源目标跟踪控制器;所述无线信号收发装置无线信号连接有地面指挥终端;所述火源目标识别器信号连接所述无线信号收发装置;所述灭火弹冷发射装置设置有观测器,所述观测器信号连接所述无线信号收发装置。
9.所述一种无人机投射灭火弹瞄准方法,设火源隐患点为a点,所述灭火弹冷发射装置的灭火弹理想瞄准点也即最佳抛洒点为b点,所述灭火弹实时瞄准点为c点;所述无人机投射灭火弹瞄准方法即是将c点与b点重合,具体步骤为:步骤1:使所述飞行平台静止于a点斜上方的上空,且所述飞行平台距离a点的垂直高度为第一设定数值范围内,所述飞行平台距离a点的水平距离在第二设定数值范围内,并保持水平姿态;步骤2:根据所述飞行平台与a点垂直距离及水平距离,得出真实b点位置,由于a点会发生变化,因而b点也在发生变化,但应保证b点位置在步骤1的允许范围内;步骤3:所述火源目标跟踪控制器模拟b点位置;步骤4:所述火源目标跟踪控制器控制所述灭火弹冷发射装置,使c点与模拟b点重合,以配合灭火弹投射。
10.进一步的,所述步骤3的模拟b点方法为,建立数学模型,并利用线性化方法将非线性模型线性化,具体为:步骤3-1:由于火源隐患的位置可能发生变化,因而b点位置也随着发生变化,由此b点能够在三维空间x-y-z内做任意运动,其在某个时刻k的位置、速度和加速度可以表示为: (1)b点可以在三维空间内做任意运动,其在x,y,z轴三个运动方向上具有系统噪声为,笛卡尔坐标系下b点的运动方程为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);步骤3-2:将方程(2)线性表示,可以得到
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中: (4);步骤3-3:令为传感器采样时间间隔,高斯白噪声序列为:
ꢀ
(5)且,;步骤3-4:假设安装在灭火弹冷发射装置上的观测传感器对b点进行观测,观测方式采用方位角,观测量为俯仰角和偏航角,相对位置可用x-y-z表示,设测量噪声为,在笛卡尔坐标系下,观测方程为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)式中:
ꢀꢀꢀꢀ
(7)为高斯型白色随机向量序列,有:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中又有: (9)在笛卡尔坐标系下,该运动模型观测方程是非线性的,对于系统状态方程和观测方程,有定义:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
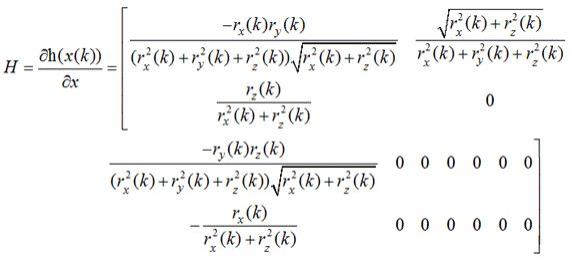
(10)步骤3-5:系统状态方程为线性,所以,观测方程线性,对求偏导数,有:
ꢀꢀꢀꢀ
(11)进一步的,所述步骤3基于扩展卡尔曼滤波进行滤波。
11.进一步的,灭火弹冷发射装置调节能力足够灵敏,能够忽略延迟响应时间。
12.进一步的,使所述飞行平台距离a点高度设定,b点与a点能够视为相对位置不变。
13.本方案的有益效果可根据对上述方案的叙述得知,针对目标点位跟踪问题设计了基于扩展卡尔曼滤波的跟踪控制器,在仅有位置数据的条件下,实现理想瞄准点的跟踪控制,消除实时瞄准点与理想瞄准点相对位置偏差、速度估计偏差、加速度估计偏差,满足冷发射传感器的控制需求。
附图说明
14.图1为本发明火源目标识别器接受到的原始图像;图2为本发明处理后的图像;图3为仿真程序流程图;图4为程序仿真初始参数设置说明示意图;图5为程序矩阵参数初始化说明示意图;图6为程序加速度和噪声的模拟和迭代说明示意图;图7为程序调用扩展卡尔曼滤波函数说明示意图;图8为调用的扩展卡尔曼滤波算法说明示意图;图9为真实值与ekf滤波值对比示意图;图10为相对位置估计偏差示意图;图11为速度估计偏差示意图;图12为加速度估计偏差示意图。
具体实施方式
15.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
16.本实施例是一种无人机投射灭火弹瞄准系统及其方法,所述无人机投射灭火弹瞄准系统包括飞行平台,所述飞行平台设置有火源目标跟踪控制器、灭火弹冷发射装置、火源目标识别器和无线信号收发装置,所述火源目标跟踪控制器信号连接所述灭火弹冷发射装置;所述火源目标识别器提供火源位置数据,所述火源目标识别器信号连接所述火源目标跟踪控制器;所述无线信号收发装置无线信号连接有地面指挥终端;所述火源目标识别器信号连接所述无线信号收发装置;所述灭火弹冷发射装置设置有观测器,所述观测器信号
连接所述无线信号收发装置。
17.所述一种无人机投射灭火弹瞄准方法,设火源隐患点为a点,所述灭火弹冷发射装置的灭火弹理想瞄准点也即最佳抛洒点为b点,所述灭火弹实时瞄准点为c点;所述无人机投射灭火弹瞄准方法即是将c点与b点重合,具体步骤为:步骤1:使所述飞行平台静止于a点斜上方的上空,且所述飞行平台距离a点的垂直高度为第一设定数值范围内,所述飞行平台距离a点的水平距离在第二设定数值范围内,并保持水平姿态;步骤2:根据所述飞行平台与a点垂直距离及水平距离,得出真实b点位置,由于a点会发生变化,因而b点也在发生变化,但应保证b点位置在步骤1的允许范围内;步骤3:所述火源目标跟踪控制器模拟b点位置;步骤4:所述火源目标跟踪控制器控制所述灭火弹冷发射装置,使c点与模拟b点重合,以配合灭火弹投射。
18.进一步的,步骤3的模拟b点方法为,建立数学模型,并利用线性化方法将非线性模型线性化,具体为:步骤3-1:由于火源隐患的位置可能发生变化,因而b点位置也随着发生变化,由此b点能够在三维空间x-y-z内做任意运动,其在某个时刻k的位置、速度和加速度可以表示为: (1)b点可以在三维空间内做任意运动,其在x,y,z轴三个运动方向上具有系统噪声为,笛卡尔坐标系下b点的运动方程为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);步骤3-2:将方程(2)线性表示,可以得到
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中: (4);步骤3-3:令为传感器采样时间间隔,高斯白噪声序列为: (5)且,;步骤3-4:假设安装在灭火弹冷发射装置上的观测传感器对b点进行观测,观测方
式采用方位角,观测量为俯仰角和偏航角,相对位置可用x-y-z表示,设测量噪声为,在笛卡尔坐标系下,观测方程为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)式中:
ꢀꢀꢀꢀ
(7)为高斯型白色随机向量序列,有:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中又有: (9)在笛卡尔坐标系下,该运动模型观测方程是非线性的,对于系统状态方程和观测方程,有定义:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)步骤3-5:系统状态方程为线性,所以,观测方程线性,对求偏导数,有:
ꢀꢀꢀꢀ
(11)进一步的,步骤3基于扩展卡尔曼滤波进行滤波。
19.进一步的,灭火弹冷发射装置调节能力足够灵敏,能够忽略延迟响应时间。
20.进一步的,使飞行平台距离a点高度设定,b点与a点能够视为相对位置不变。
21.为了对本方案进行检验,设计了仿真试验,在试验中:基于数学模型设置初始仿真参数:(1)传感器采样时间=0.1s,仿真时间t=3.7s。
22.(2)设置c点初始状态。
23.(3)设定b点初始状态。
24.(4)过程噪声方差,。
25.(5)估计状态协方差矩阵。
26.仿真基于matlab的m脚本文件,程序的设计流程如图3所示:如图4所示为初始仿真参数设置有关代码,其中作为整个仿真的采样次数,状态转移矩阵为矩阵,控制量驱动矩阵为矩阵。
27.如图5所示为c点,b点系统状态矩阵初始化,定义过程噪声矩阵和观测噪声矩阵。
28.如图6所示为在一定的仿真次数内,对c点三个方向的加速度进行迭代;在此处可近似看作观测器在x-y-z坐标系中沿着各个坐标轴的加速度,各个方向的速度迭代单独计算且互相独立,目标状态方程由式(1)推导得出。
29.如图7所示为根据观测值滤波得到灭火弹冷发射装置(c点)三个方向加速度,并调用扩展卡尔曼滤波函数,图8为调用的扩展卡尔曼滤波算法。
30.如图9所示为b点轨迹(真实值)与c点轨迹(ekf滤波值)的位移对比图,可以看出,b点在空间内进行三维随机运动时,对应的每一个采样点,c点取值与b点接近。
31.如图10所示为c点与b点的相对位置估计偏差,可以看出,等到曲线稳定时相对位置估计偏差约为2m。
32.如图11所示为c、b两点的速度估计偏差,最终稳定值附近的速度估计偏差约为3m/
s。
33.如图12所示为加速度估计偏差,在响应时间t=0.2s时进入稳定区间,随后在0.15m/s2ꢀ‑
0.2 m/s2间波动。
34.可见,针对目标点位跟踪问题设计了基于扩展卡尔曼滤波的跟踪控制器,在仅有位置数据的条件下,实现理想瞄准点的跟踪控制,消除实时瞄准点与理想瞄准点相对位置偏差、速度估计偏差、加速度估计偏差,满足冷发射传感器的控制需求。
35.本发明未经描述的技术特征能够通过或采用现有技术实现,在此不再赘述,当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1