一种消防机器人智能控制电路
1.本实用新型属于机器人控制技术领域,具体涉及一种消防机器人智能控制电路。
背景技术:
2.随着科技技术的飞快进步,机器人的发展也越来越快,近几年来,机器人不再是不可触及的科技产物,酒店会使用机器人对房客的入住做引导,餐厅会使用机器人帮助客人上菜,在家中人们也会选择扫地机器人进行垃圾清理,这都使得人们在生活中越来越方便,除了在生活中,机器人对于消防行业也有很大作用,消防机器人的出现大大减少因高温、有毒、缺氧环境下消防人员伤亡量,消防机器人还可根据现场实际情况,来进行数据采集、处理和传输反馈,消防人员可根据数据做好充分的准备工作,现有技术中消防机器人工作时,因消防现场局部供电质量不佳,电压不稳或者工作环境恶劣,如通风不良、周围环境温度过高,容易造成消防机器人电机负载电流增大,当电机负载电流增加到大于电机的额定负载电流时,消防机器人直接触发报警系统,导致电机停止工作,以此电机经常启闭状态切换,对电机造成损伤,导致消防机器人使用寿命较短。
3.因此本实用新型提供一种新的方案来解决此问题。
技术实现要素:
4.针对现有技术消防机器人检测系统单一导致电机寿命较短的问题,本实用新型提出了一种消防机器人智能控制电路,可提高消防机器人使用寿命的需求。为解决以上技术问题,本实用新型所采用的技术方案如下:
5.一种消防机器人智能控制电路,所述消防机器人智能控制电路包括电流检测电路、电流控制电路、温度检测控制电路、报警电路,所述电流检测电路用于检测消防机器人电机的负载电流,电流检测电路与电流控制电路的输入端连接,电流控制电路对温度检测控制电路的启闭进行控制,所述温度检测控制电路用于检测消防机器人电机所处环境温度,温度检测控制电路对报警电路的启闭进行控制,所述报警电路与电流检测电路连接,电流控制电路、温度检测控制电路与报警电路对电机控制系统启闭进行控制。
6.所述电流检测电路包括用于检测消防机器人电机的电流采样电路,电流采样电路的输出端与绝对值比较电路的输入端连接,绝对值比较电路的输出端与电流控制电路连接。
7.所述电流采样电路包括用于检测消防机器人电机负载电流的电流互感器ta,电流互感器ta的引脚1与电阻r1的一端、二极管d1的正极、电阻r2的一端、电容c1的一端、放大器ar1的反相输入端连接,放大器ar1的同相输入端与二极管d2的正极、电流互感器ta的引脚2、电阻r1的一端连接并接地,放大器ar1的输出端与电阻r2的另一端、电容c1的另一端、绝对值比较电路的输入端、报警电路的输入端连接,二极管d1的负极与二极管d2的负极连接。
8.所述绝对值比较电路包括电阻r3,电阻r3的一端与电流采样电路、电阻r27的一端连接,电阻r3的另一端与二极管d4的负极、电阻r4的一端、放大器ar2的反相输入端连接,放
大器ar2的输出端与二极管d3的负极、二极管d4的正极连接,二极管d3的正极与电阻r4的另一端、电阻r5的一端连接,电阻r5的另一端与电阻r6的一端、电阻r27的另一端、放大器ar3的反相输入端连接,放大器ar3的输出端与电阻r6的另一端、电阻r7的一端连接,电阻r7的另一端与比较器ar4的同相输入端连接,比较器ar4的反相输入端与电阻r8的一端、电阻r9的一端连接,比较器ar4的输出端与电流控制电路的输入端连接,电阻r8的另一端与电源vcc连接,电阻r9的另一端与放大器ar2的同相输入端、ar3的同相输入端均接地。
9.所述电流控制电路包括电阻r10,电阻r10的一端与电流检测电路的输出端、电阻r11的一端连接,电阻r10的另一端与三极管q1的基极连接,三极管q1的集电极与继电器k1的一端、二极管d5的正极连接、三极管q1的发射极与电阻r13的一端连接,继电器k1的另一端与电阻r12的一端连接并与电源vcc连接,二极管d5的负极与电阻r12的另一端连接,电阻r13的另一端接地,电阻r11的另一端与三极管q2的基极连接,三极管q2的发射极与电阻r15的一端连接,电阻r15的另一端与电源vcc连接,三级管q2的集电极与电机控制系统、电阻r14的一端连接,电阻r14的另一端接地。
10.所述温度检测控制电路包括用于检测消防机器人电机所处环境温度的温度传感器p1,温度传感器p1的引脚1与电阻r16的一端连接,温度传感器p1的引脚2与电阻r17的一端连接,电阻r17的另一端与比较器ar5的同相输入端连接,比较器ar5的反相输入端与电阻r18的一端、电阻r19的一端连接,比较器ar5的输出端与电阻r21的一端、电阻r22的一端连接,电阻r21的另一端与电阻r20的一端、三极管q3的基极连接,三极管q3的集电极与继电器k3的一端、二极管d6的正极连接,三极管q3的发射极与电阻r25的一端连接,继电器k3的另一端与电阻r24的一端连接并与电源vcc连接,二极管d6的负极与电阻r24的另一端连接,电阻r22的另一端与电阻r23的一端、mos管q4的栅极连接,mos管q4的源极与电阻r26的一端连接,mos管q4的漏极与电机控制系统、电阻r23的另一端连接并接地,电阻r16的另一端与常开触点k1-1的一端连接,常开触点k1-1的另一端与电阻r18的另一端、电阻r20的另一端、电阻r26的另一端连接并与电源vcc连接,所述常开触点k1-1受电流控制电路控制,温度传感器p1的引脚3与电阻r19的另一端、电阻r25的另一端均接地。
11.所述报警电路包括峰值检测电路,峰值检测电路的输入端与电流检测电路连接,峰值检测电路的输出端与报警控制电路连接,报警控制电路与报警系统、电机控制系统连接。
12.所述峰值检测电路包括常开触点k3-1,常开触点k3-1受温度检测控制电路控制,常开触点k3-1的一端与电流检测电路连接,常开触点k3-1的另一端与电阻r36的一端连接,电阻r36的另一端与放大器ar6的同相输入端连接,放大器ar6的反向输入端与二极管d7的正极、电阻r28的一端连接,放大器ar6的输出端与二极管d7的负极、二极管d8的正极连接,二极管d8的负极与电容c2的一端、放大器ar7的同相输入端连接,放大器ar7的输出端与电阻r28的另一端、放大器ar7的反相输入端、比较器ar8的同相输入端连接,比较器ar8的反相输入端与电阻r29的一端连接,比较器ar8的输出端与报警控制电路的输入端连接,电阻r29的另一端与电源vcc连接,电容c2的另一端接地。
13.所述报警控制电路包括电阻r33,电阻r33的一端与电阻r30的一端、峰值检测电路的输出端连接,电阻r33的另一端与三极管q5的基极连接,三极管q5的集电极与二极管d9的正极、继电器k2的一端连接,三极管q5的发射极与电阻r35的一端连接,继电器k2的另一端
与电阻r34的一端、继电器k2的常开触点k2-1的一端连接并与电源vcc连接,继电器k2的常开触点k2-1的另一端与报警系统连接,二极管d9的负极与电阻r34的另一端连接,电阻r30的另一端与三极管q6的基极连接,三极管q6的发射极与电阻r31的一端连接,三极管q6的集电极与电机控制系统、电阻r32的一端连接,电阻r31的另一端与电源vcc连接,电阻r32的另一端与电阻r35的另一端均接地。
14.本实用新型的有益效果:
15.通过设置电流互感器ta对消防机器人电机负载电流进行采样,并利用绝对值比较电路中的放大器ar2与放大器ar3进行整流传输至比较器ar4,比较器ar4比较后将信号传输至电流控制电路,避免了当电机负载电流超过额定值后立即报警,当判断电机负载电流值大于额定电流后,温度检测控制电路导通,温度传感器p1将采集到的电机所处环境温度信号传输至比较器ar5进行比较,当电机所处环境温度未超过标准温度值时,允许电机正常工作,当电机所处环境超过标准值时,报警电路导通,重新采样电机负载电流并利用峰值检测电路的放大器ar6与放大器ar7进行电机负载电流的峰值检测并将检测后信号传输至比较器ar8,比较器ar8比较后将信号传输至报警控制电路,当判断电机负载电流值超过电机负载电流最大值,报警系统立即触发,当电机负载电流值未超过电机负载电流最大值时,电机正常工作,通过设置电机负载电流最大值使电机允许超出额定电流一定范围进行工作,避免消防机器人电机频繁启停切换,提高消防机器人的使用寿命。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
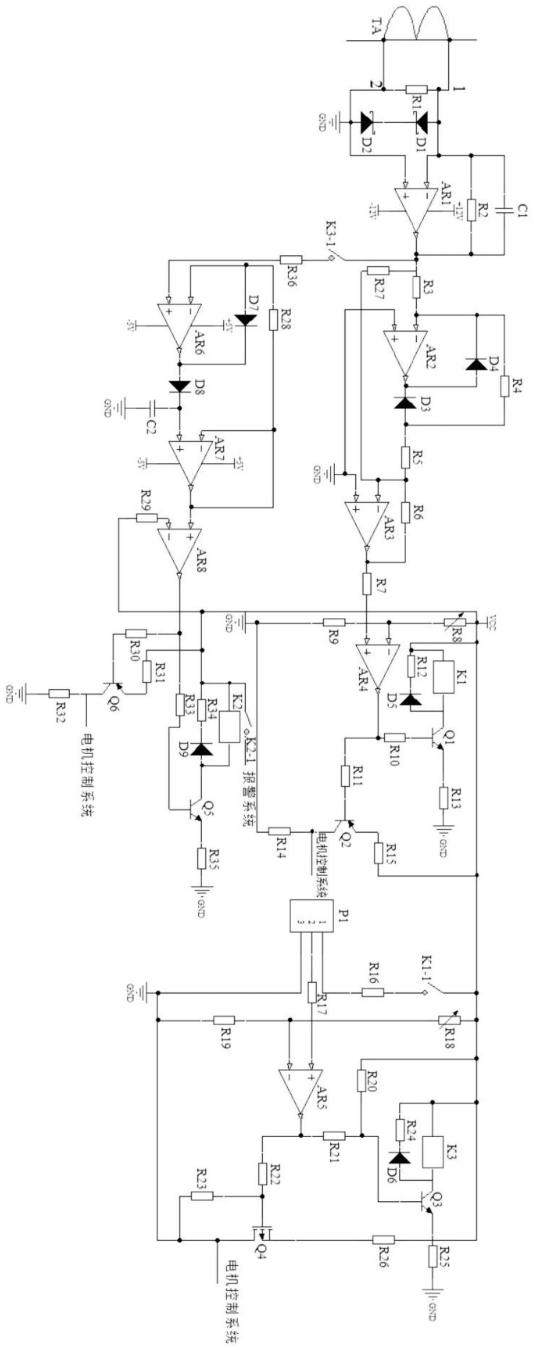
17.图1为本实用新型的结构示意图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.一种消防机器人智能控制电路,如图1所示,所述消防机器人智能控制电路包括电流检测电路、电流控制电路、温度检测控制电路、报警电路,电流检测电路用于检测消防机器人电机的负载电流,负载电流检测后传输至电流控制电路,当电机负载电流未超过额定电流时,消防机器人正常工作,当电机负载电流超过额定电流时,温度检测控制电路导通,温度检测控制电路受电流控制电路控制,温度检测控制电路用于检测消防机器人电机所处环境温度,当所处环境温度值小于标准值时,允许消防机器人电机超负荷运行,消防机器人正常工作,当所处环境温度值大于标准值时,报警电路导通,报警电路受温度检测控制电路控制,报警电路重新采集电机负载电流并进行电流峰值检测,当负载电流值低于电机允许超出负载电流最大值时,消防机器人正常工作,当负载电流值高于电机允许超出负载电流
最大值时,消防机器人触发报警系统,避免了负载电流超过额定电流后立即报警,导致电机经常启停,提高消防机器人的使用寿命。
20.所述检测电路包括用于检测消防机器人电机的电流采样电路,电流采样电路的输出端与绝对值比较电路的输入端连接,电流采样电路将采集到的消防机器人电机负载电流通过绝对值比较电路进行整流比较,绝对值比较电路的输出端与电流控制电路连接。
21.所述电流采样电路包括用于检测消防机器人电机负载的电流互感器ta,电流互感器ta的引脚1与电阻r1的一端、二极管d1的正极、电阻r2的一端、电容c1的一端、放大器ar1的反相输入端连接,电阻r1为采样电阻,放大器ar1的同相输入端与二极管d2的正极、电流互感器的引脚2、电阻r1的一端连接并接地,放大器ar1的输出端与电阻r2的另一端、电容c1的另一端、绝对值比较电路的输入端、报警电路的输入端连接,放大器ar1将所测消防机器人电机负载电流进行放大并传输至绝对值比较电路,二极管d1的负极与二极管d2的负极连接构成稳压二极管。
22.所述绝对值比较电路包括电阻r3,电阻r3的一端与电流采样电路、电阻r27的一端连接,电阻r3的另一端与二极管d4的负极、电阻r4的一端、放大器ar2的反相输入端连接,放大器ar2的输出端与二极管d3的负极、二极管d4的正极连接,二极管d3的正极与电阻r4的另一端、电阻r5的一端连接,电阻r5的另一端与电阻r6的一端、电阻r27的另一端、放大器ar3的反相输入端连接,放大器ar3的输出端与电阻r6的另一端、电阻r7的一端连接,电阻r7的另一端与比较器ar4的同相输入端连接,放大器ar2与放大器ar3对消防机器人电机负载电流整流,将整流后的负载电流通过电阻r7转换为电压信号传输至比较器ar4,比较器ar4的反相输入端与电阻r8的一端、电阻r9的一端连接,比较器ar4的输出端与电流控制电路的输出端连接,电阻r8的另一端与电源vcc连接,电阻r8与电阻r9对电源vcc进行分压,电阻r9的电压为基准电压,电阻r9的另一端与放大器ar2的同相输入端、ar3的同相输入端均接地。
23.所述电流控制电路包括电阻r10,电阻r10的一端与电流检测电路的输出端、电阻r11的一端连接,电阻r10的另一端与三极管q1的基极连接用于保护三极管q1,三极管q1的集电极与继电器k1的一端、二极管d5的正极连接,三极管q1的发射极与电阻r13的一端连接,继电器k1的另一端与电阻r12的一端连接并与电源vcc连接,二极管d5的负极与电阻r12的另一端连接,电阻r13的另一端接地,当消防机器人电机负载电流超过额定电流值时,电流检测电路的比较器ar4输出高电平,三极管q1导通,使得继电器k1导通,此时温度检测控制电路导通,电阻r11的另一端与三极管q2的基极连接起保护作用,三极管q2的发射极与电阻r15的一端连接,电阻r15的另一端与电源vcc连接,三极管q2的集电极与电机控制系统、电阻r14的一端连接,电阻r14的另一端接地,当消防机器人电机负载电流未超过额定电流时,电流检测电路的比较器ar4输出低电平,三极管q2导通,消防机器人正常工作。
24.所述温度检测控制电路包括用于检测消防机器人电机所处环境温度的温度传感器p1,其型号为tmp236,温度传感器p1的引脚1与电阻r16的一端连接,电阻r16用于限流保护温度传感器p1,温度传感器p1的引脚2与电阻r17的一端连接,电阻r17的另一端与比较器ar5的同相输入端连接,比较器ar5的反相输入端与电阻r18的一端、电阻r19的一端连接,电阻r18与电阻r19对电源vcc分压,且电阻r19的电压为基准电压,比较器ar5的输出端与电阻r21的一端、电阻r22的一端连接,电阻r21的另一端与电阻r20的一端、三极管q3的基极连接,三极管q3的集电极与继电器k3的一端、二极管d6的正极连接,三极管q3的发射极与电阻
r25的一端连接,继电器k3的另一端与电阻r24的一端连接并与电源vcc连接,二极管d6的负极与电阻r24的另一端连接,二极管d6用于保护继电器k3不被感应电压击穿和损坏,当消防机器人电机所处环境温度超过温度标准值时,比较器ar5输出高电平,三极管q3导通,继电器k3导通,报警电路受温度检测控制电路控制导通,电阻r22的另一端与电阻r23的一端、mos管q4的栅极连接,mos管q4的漏极与电机控制系统、电阻r23的另一端连接并接地,mos管q4的源极与电阻r26的一端连接,当消防机器人电机所处环境温度未超过温度标准值时,比较器ar5输出低电平,mos管q4导通,消防机器人正常工作,电阻r16的另一端与常开触点k1-1的一端连接,常开触点k1-1的另一端与电阻r18的另一端、电阻r20的另一端、电阻r26的另一端连接并与电源vcc连接,所述常开触点k1-1受电流控制电路控制,温度传感器p1的引脚3与电阻r19的另一端、电阻r25的另一端、mos管q4的源极均接地。
25.所述报警电路包括峰值检测电路,峰值检测电路用于检测消防机器人电机的负载电流,峰值检测电路的输入端与电流检测电路连接,峰值检测电路的输出端与报警控制电路连接,报警控制电路与报警系统、电机控制系统连接。
26.所述峰值检测电路包括常开触点k3-1,常开触点k3-1受温度检测控制电路控制,常开触点k3-1的一端与电流检测电路连接,常开触点k3-1的另一端与电阻r36的一端连接,电阻r36的另一端与放大器ar6的同相输入端连接,电阻r36具有限流保护作用,放大器ar6的反相输入端与二极管d7的正极、电阻r28的一端连接,放大器ar6的输出端与二极管d7的负极、二极管d8的正极连接,二极管d8的负极与电容c2的一端、放大器ar7的同相输入端连接,放大器ar7的输出端与电阻r28的另一端、放大器ar7的反相输入端、比较器ar8的同相输入端连接,比较器ar8的反相输入端与电阻r29的一端连接,比较器ar8的输出端与报警控制电路的输入端连接,放大器ar6和放大器ar7构成峰值检测器,二极管d7、二极管d8为单向导通开关,电容c2为峰值存储器,电阻r29的另一端与电源vcc连接,电容c2的另一端接地。
27.所述报警控制电路包括电阻r33,电阻r33用于对三极管q5限流保护,电阻r33的一端与电阻r30的一端、峰值检测电路的输出端连接,电阻r33的另一端与三极管q5的基极连接,三极管q5的集电极与二极管d9的正极、继电器k2的一端连接,三极管q5的发射极与电阻r35的一端连接,继电器k2的另一端与电阻r34的一端、继电器k2的常开触点k2-1的一端连接并与电源vcc连接,继电器k2的常开触点k2-1的另一端与报警系统连接,二级管d9的负极与电阻r34的另一端连接,二极管d9用于保护继电器k3不被感应电压击穿和损坏,当消防机器人电机负载电流超过电机允许超出负载电流最大值时,峰值检测电路的比较器ar8输出高电平,三极管q5导通,继电器k2导通,继电器k2的常开触点k2-1闭合,报警系统触发报警,电阻r30的另一端与三极管q6的基极连接,三极管q6的发射极与电阻r31的一端连接,三极管q6的集电极与电机控制系统、电阻r32的一端连接,当消防机器人电机负载电流未超过电机允许超出负载电流最大值时,峰值检测电路的比较器ar8输出低电平,三极管q6导通,消防机器人正常工作,电阻r31的另一端与电源vcc连接,电阻r32的另一端与电阻r35的另一端均接地。
28.本实用新型在使用中,所述电流检测电路利用电流互感器ta采集消防机器人电机负载电流,负载电流通过放大器ar2和放大器ar3整流并输出至比较器ar4,当消防机器人电机负载电流未超过负载额定电流时,比较器ar4输出低电平至电流控制电路,三极管q2导通,消防机器人正常工作,当消防机器人电机负载电流超过负载额定电流时,比较器ar4输
出高电平至电流控制电路,三极管q1导通,继电器k1导通,温度检测控制电路受电流控制电路控制导通,温度传感器p1将感应到的消防机器人电机所处环境温度信号输出至比较器ar5,当电机所处环境温度未超过温度标准值时,比较器ar5输出低电平,mos管q4导通,消防机器人正常工作,当电机所处环境温度超过温度标准值,比较器ar5输出高电平,三极管q3导通,继电器k3导通,报警电路受温度检测控制电路控制导通并重新采样消防机器人电机负载电流,采样负载电流通过放大器ar6和放大器ar7进行峰值检测并输出至比较器ar8,当消防机器人电机负载电流未超过电机允许负载电流最大值时,比较器ar8输出低电平,三极管q6导通,消防机器人正常工作,当消防机器人电机负载电流超过电机允许负载电流最大值时,比较器ar8输出高电平,三极管q5导通,消防机器人报警系统报警,消防机器人电机负载电流最大值大于电机负载额定电流值,以此增加消防机器人的报警条件,避免消防机器人电机负载电流超过额定电流时立即报警,防止电机经常启停,提高消防机器人的使用寿命。
29.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1