消防灭火机器人的制作方法
本技术涉及消防设备领域,尤其是涉及消防灭火机器人。
背景技术:
1、森林火灾,是指失去人为控制,在林地内自由蔓延和扩展,对森林、森林生态系统和人类带来一定危害和损失的林火行为。森林火灾是一种突发性强、破坏性大、处置救助较为困难的自然灾害。森林火灾是森林最危险的敌人,也是林业最可怕的灾害,它会给森林带来最有害,最具有毁灭性的后果。森林火灾不但烧毁成片的森林,伤害林内的动物,而且还降低森林的繁殖能力,引起土壤的贫瘠并破坏森林涵养水源,甚至会导致生态环境失去平衡。
2、消防机器人是特种机器人的一种,在消防灭火、抢险救援中愈加发挥举足轻重的作用。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场,进行探测、反馈、处置作业,为及时有效的救援处置大大提高了效率,降低了人员伤亡风险。
3、在发生森林火灾时,需要消防人员快速的进入火灾区域进行灭火作业,但是往往森林火灾形式复杂,对于消防人员来说也是非常的危险,因此,需要设计一种消防灭火机器人,代替消防人员进入森林火灾区域进行灭火、救援等作业,可以有效的提高消防人员的安全性,并且快速的进行灭火作业,提高灭火效率,降低火灾造成的破坏。
技术实现思路
1、为解决森林消防的问题,代替消防人员进行灭火、救援等作业,提高消防人员的安全性,提高灭火效率,降低火灾造成的破坏,所以本技术提供消防灭火机器人。
2、本技术提供的消防灭火机器人采用如下的技术方案。
3、消防灭火机器人,包括:行走装置、灭火装置;
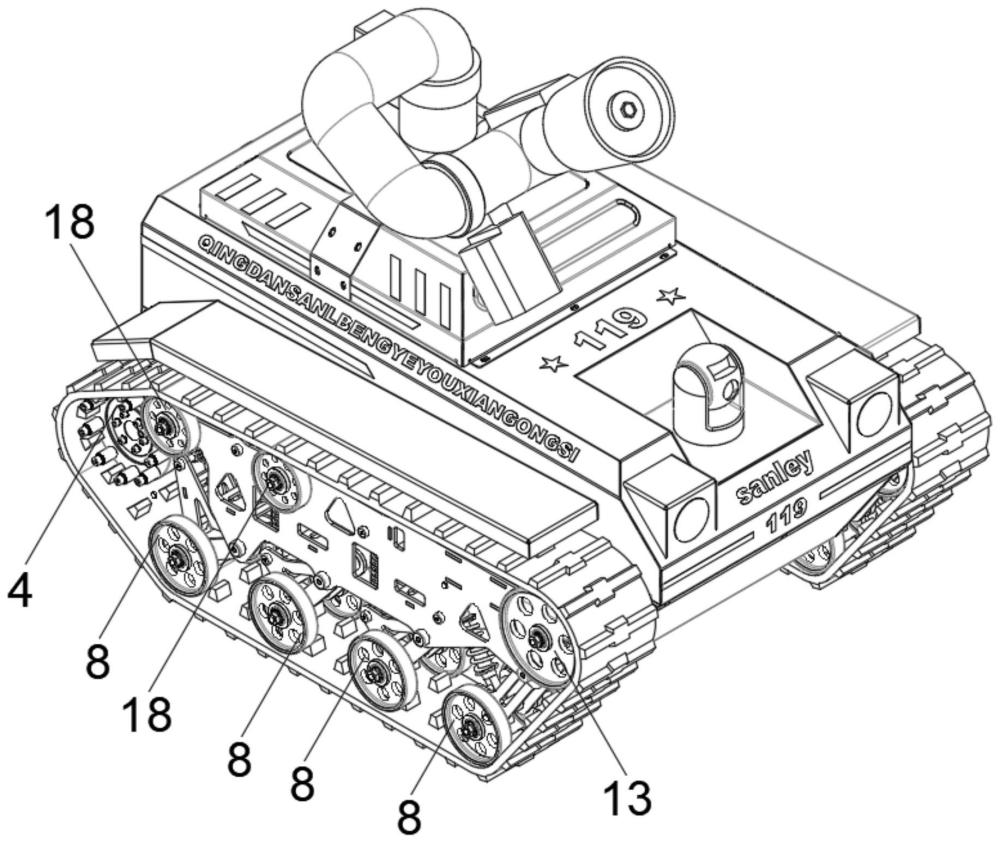
4、所述行走装置包括行走壳体,所述行走壳体的两侧设置有带轮组件,所述带轮组件包括主动带轮和从动带轮组,所述主动带轮通过主动带轮轮轴转动设置在行走壳体上,且通过设置在行走壳体内的动力件a带动旋转,所述从动带轮组包括从动带轮架,所述从动带轮架设置在行走壳体的侧部,在从动带轮架上转动设置有若干从动带轮,所述主动带轮和若干从动带轮上配合设置有履带;
5、所述灭火装置包括消防炮、炮座,所述炮座固定设置在行走壳体上,所述消防炮转动设置在炮座上,所述炮座内设置有带动消防炮的底部旋转的动力件b,所述行走壳体的后端开设有接水管,所述接水管外接供水管为消防炮供水;
6、该消防灭火机器人还设置有远程控制系统,所述远程控制系统包括plc控制器和无线传输模块,通过远程遥控器控制该消防灭火机器人的运行。
7、通过采用上述技术方案,将行走装置和灭火装置结合,通过行走装置带动灭火装置移动,代替了消防人员的手持操作,并且通过远程控制系统,消防人员可以实现远程操作控制,使得消防人员不需要近距离靠近火源,有利于保障消防人员安全性。并且行走装置采用履带式结构,履带行驶更加稳定可靠,森林往往地形复杂,而履带对地面要求低,行驶能力更强,能更好的适用于复杂地形。
8、可选的,所述主动带轮包括主动带轮轮轴、轮毂,所述轮毂固定设置在主动带轮轮轴的端部,靠近轮毂外缘的两侧,沿轮毂圆周方向均匀间隔设置有若干齿杆,若干齿杆与履带啮合传动设置。
9、通过采用上述技术方案,齿杆的结构简单可靠,能够在复杂地形保证于履带的啮合,保证消防灭火机器人的行驶能力。
10、可选的,若干所述从动带轮包括若干支撑带轮,所述支撑带轮通过支承带轮轮轴转动设置在支撑架上,所述支撑架的一端与从动带轮架铰接,支撑架的另一端与从动带轮架通过悬架连接,所述悬架包括导向筒、导向柱、螺旋弹簧,所述导向柱的一端插入导向筒内与导向筒伸缩配合,所述导向柱的一端与从动带轮架铰接,所述导向筒的底端与支撑架铰接,所述螺旋弹簧套设在导向筒和导向柱上,且螺旋弹簧的两端分别与导向筒和导向柱相抵。
11、通过采用上述技术方案,支撑带轮通过支撑架摆动设置在从动带轮架上,并通过悬架的设置,缓冲由不平路面传给消防灭火机器人的冲击力,并减少由此引起的震动,以保证消防灭火机器人能平顺地行驶,提高消防灭火机器人的行驶通过能力。
12、可选的,若干所述从动带轮还包括诱导张紧带轮,所述诱导张紧带轮转动设置在从动带轮架的一端,且与从动带轮架之间可移动调节设置。
13、通过采用上述技术方案,通过诱导张紧带轮的设置,可以用来诱导和支撑履带,并通过可移动调节设置,调整履带的松紧程度。
14、可选的,所述诱导张紧带轮通过轴承转动设置在诱导张紧带轮轮轴上,诱导张紧带轮轮轴设置在调节杆上,所述调节杆滑动设置在从动带轮架上,在调节杆上沿调节杆滑动方向设置有螺纹杆,所述从动带轮架上设置有开设通孔的调节板,所述螺纹杆穿过通孔,位于调节板两侧的螺纹杆上螺纹配合设置有螺母。
15、通过采用上述技术方案,通过螺纹杆、调节板和螺母的配合设置,通过旋转调节板两侧的螺母即可调节螺纹杆在调节板两侧的长度,进而带动调节杆移动,实现带动诱导张紧带轮移动,达到调整履带松紧的目的。
16、可选的,所述带轮组件还包括若干托带轮,若干所述托带轮转动设置在从动带轮架顶部,用于承托履带。
17、通过采用上述技术方案,托带轮主要用来托着上履带,防止履带发生撞击。
18、可选的,所述行走壳体内设置有电池模块,所述行走壳体上设置有为电池模块充电的充电接口,所述行走壳体上设置有显示电池模块电量的电量显示口。
19、通过采用上述技术方案,通过电池模块的设置,该消防灭火机器人不再需要外接电源,没有了拉扯电源线的问题,提高了使用便捷性,并且实现可以通过充电接口充电,实现循环使用,电量显示口可以观察电量,可以发现电量低及时的充电补充电量,防止在灭火使用中供电不足失去控制。
20、可选的,所述履带的外圈设置有凸条纹和凸块。
21、通过采用上述技术方案,通过凸条纹和凸块的设置,提高履带的防滑能力,有利于提高该消防灭火机器人的行驶通过能力。
22、可选的,所述行走壳体为防爆壳体设置。
23、通过采用上述技术方案,通过防爆壳体的设置,可以防止在消防灭火作业中的意外发生,防止内部零部件的损坏。
24、可选的,所述履带为橡胶材质。
25、通过采用上述技术方案,该消防灭火机器人体积较小,重量较轻,使用橡胶履带完全可以满足使用需求,橡胶履带重量轻,有利于实现轻量化设计,对地面的损坏程度较小,减小了对森林植物的损害。而且降低能耗,提高消防灭火机器人的单次作业使用时间。
26、综上所述,本技术至少包括以下有益效果:
27、1、本技术将行走装置和灭火装置结合,通过行走装置带动灭火装置移动,代替了消防人员的手持操作,并且通过远程控制系统,消防人员可以实现远程操作控制,使得消防人员不需要近距离靠近火源,有利于保障消防人员安全性。并且行走装置采用履带式结构,履带行驶更加稳定可靠,森林往往地形复杂,而履带对地面要求低,行驶能力更强,能更好的适用于复杂地形。
28、2、本技术的行走壳体内设置有电池模块,行走壳体上设置有为电池模块充电的充电接口,行走壳体上设置有显示电池模块电量的电量显示口。通过电池模块的设置,该消防灭火机器人不再需要外接电源,没有了拉扯电源线的问题,提高了使用便捷性,并且实现可以通过充电接口充电,实现循环使用,电量显示口可以观察电量,可以发现电量低及时的充电补充电量,防止在灭火使用中供电不足失去控制
29、3、本技术的行走壳体为防爆壳体设置,可以防止在消防灭火作业中的意外发生,防止内部零部件的损坏,尤其是电池模块,防止发生爆炸。
30、4、本技术的履带为橡胶材质,该消防灭火机器人体积较小,重量较轻,使用橡胶履带完全可以满足使用需求,橡胶履带重量轻,有利于实现轻量化设计,对地面的损坏程度较小,减小了对森林植物的损害。而且降低能耗,提高消防灭火机器人的单次作业使用时间。
- 还没有人留言评论。精彩留言会获得点赞!