一种基于化工园区应急事件的无人机控制方法与流程
本发明涉及无人机,尤其涉及一种基于化工园区应急事件的无人机控制方法。
背景技术:
1、化工产业园区中的化工工艺流程复杂、反应单元多、原料种类杂,工艺控制严,技术密集度高。化工产业园区中化工装置火灾事故为防范重点,同时由于精细化工园区为代表的产业形成内部供给闭环,上下游产业易形成事故连锁反应。一旦发生火灾,火势将迅速沿容器管线向各个方向蔓延,形成大面积的燃烧。毒害性较大,化工火灾中常见的有毒气体和烟雾对人体健康构成严重威胁,可能导致中毒、窒息甚至死亡。并且,有毒气体和烟雾的释放也会对周围环境造成污染,影响生态平衡和人类健康。
2、因此,化工园区优选采用消防无人机进行远程灭火以避免有毒气体和烟雾对人体健康构成威胁。
3、在化工园区灭火的过程中,通常采用“三叠加、三梯次”的灭火剂泡沫梯次叠加投放的战法,其是通过低、中、高倍数泡沫及灭火剂梯次释放推进泡沫覆盖层,形成“低倍主灭火、中倍推低倍、高倍强补位”的泡沫和灭火剂叠加覆盖,形成立体“全泡沫”灭火力量,可提高灭火效率且适应不同类型的化工园区火灾场景。
4、然而,如何使消防无人机可根据火灾情况,自动执行灭火剂泡沫梯次叠加投放,以适应化工园区的灭火方式,是目前有待解决的技术问题。
技术实现思路
1、为此,本发明提供一种基于化工园区应急事件的无人机控制方法,通过三维温度场图像确定消防无人机执行灭火剂泡沫梯次叠加投放策略的过程,实现了消防无人机可根据准确的火灾情况自动执行灭火剂泡沫梯次叠加投放,保证了消防无人机可迅速降低化工园区的火场温度,防止火灾扩大和复燃。
2、为实现上述目的,本发明提出一种基于化工园区应急事件的无人机控制方法,包括:
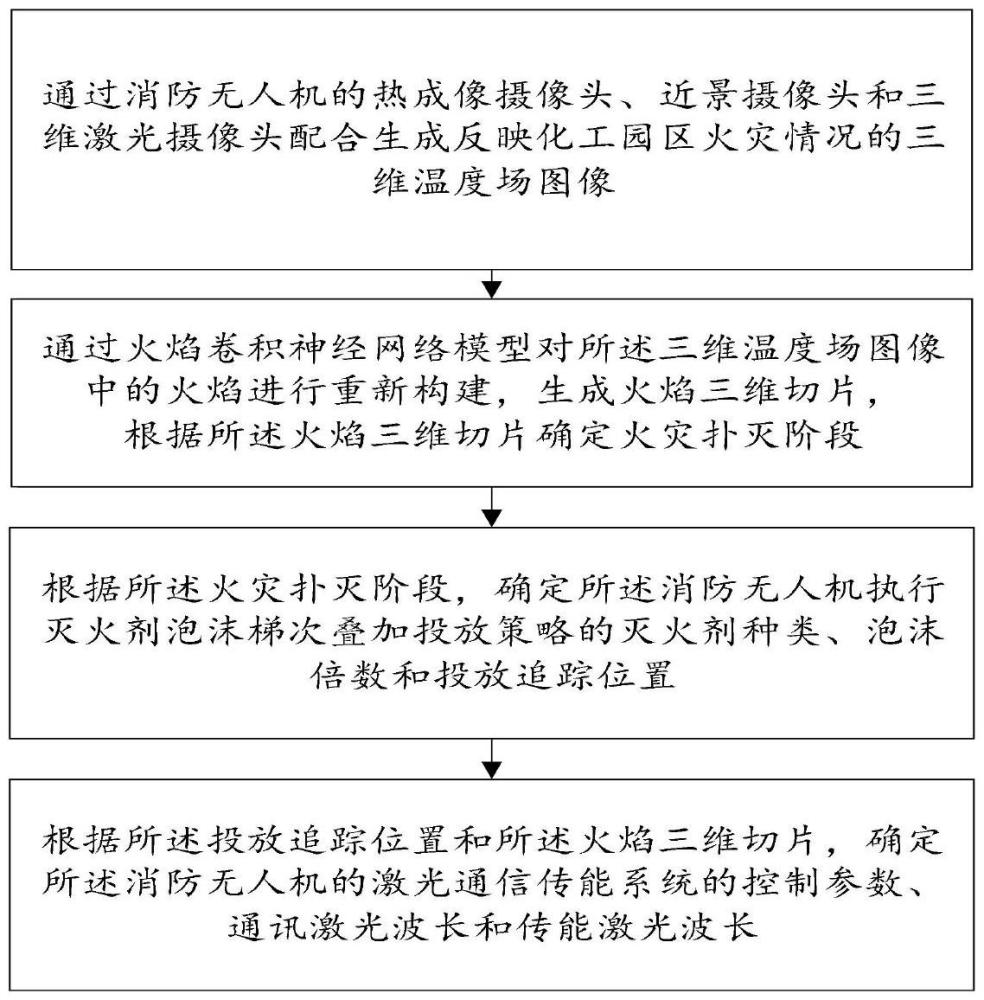
3、通过消防无人机的热成像摄像头、近景摄像头和三维激光摄像头配合生成反映化工园区火灾情况的三维温度场图像;
4、通过火焰卷积神经网络模型对所述三维温度场图像中的火焰进行重新构建,生成火焰三维切片;
5、根据所述火焰三维切片确定火灾扑灭阶段;
6、根据所述火灾扑灭阶段,确定所述消防无人机执行灭火剂泡沫梯次叠加投放策略的灭火剂种类、泡沫倍数和投放追踪位置;
7、根据所述投放追踪位置和所述火焰三维切片,确定所述消防无人机的激光通信传能系统的控制参数、通讯激光波长和传能激光波长。
8、进一步地,通过消防无人机的热成像摄像头、近景摄像头和三维激光摄像头配合生成反映化工园区火灾情况的三维温度场图像的步骤包括:
9、将所述热成像摄像头的采集点位和所述近景摄像头的采集点位进行匹配,生成温度场;
10、控制所述三维激光摄像头在所述采集点位处生成化工园区的三维图像;
11、将所述温度场的特征点位和所述三维图像的特征点位进行匹配,生成所述三维温度场图像。
12、进一步地,所述的将温度场的采集点位和三维图像的特征点位进行匹配生成温度场图像的步骤包括:
13、通过卷积神经网络模型,提取所述温度场的温度建筑实体边界和所述三维图像中的化工园区的图像建筑实体边界;
14、根据所述温度建筑实体边界和所述图像建筑实体边界,将所述温度场和所述三维图像进行匹配,生成所述三维温度场图像。
15、进一步地,将热成像摄像头的采集点位和近景摄像头的采集点位进行匹配生成温度场的步骤包括:
16、通过图像配准融合模型,将所述热成像摄像头的采集点位和所述近景摄像头的采集点位进行匹配,生成所述温度场。
17、上述方案中,将热成像摄像头、近景摄像头和三维激光摄像头的采集图像通过卷积神经网络模型和图像配准融合模型,进行融合,生成了可反映火灾高度、火灾温度的精准、可视化的三维温度场图像。
18、进一步地,根据火焰三维切片确定火灾扑灭阶段的步骤包括:
19、根据所述火焰三维切片中的火焰核心温度数值和多个所述火焰三维切片中的火焰蔓延速度,确定所述火灾燃烧阶段;
20、根据当前的所述火焰三维切片中的火焰形态,确定火焰是否处于钝化状态;根据所述火灾燃烧阶段和火焰是否处于钝化状态确定所述火灾扑灭阶段。
21、上述方案中,实现了根据三维温度场图像中反映的多种火焰/火灾信息,实现了对火灾扑灭阶段的精准识别。
22、进一步地,所述消防无人机上设置用于输送灭火剂的管道,所述管道通过无线控制阀门输送不同种类和不同泡沫倍数的灭火剂,所述无线控制阀门与所述消防无人机通讯;
23、根据火灾扑灭阶段确定消防无人机执行灭火剂泡沫梯次叠加投放策略的灭火剂种类、泡沫倍数的步骤包括:
24、若所述火灾扑灭阶段为初期,则所述消防无人机控制所述无线控制阀门进行低倍数泡沫灭火剂和/或气体灭火剂的投放;
25、若所述火灾扑灭阶段为中期,则所述消防无人机控制所述无线控制阀门进行中倍数泡沫灭火剂和/或特殊灭火剂的投放;
26、若所述火灾扑灭阶段为后期,则所述消防无人机控制所述无线控制阀门进行高倍数泡沫灭火剂的投放。
27、进一步地,执行所述灭火剂泡沫梯次叠加投放策略的消防无人机至少为两架;
28、根据火灾扑灭阶段确定消防无人机执行灭火剂泡沫梯次叠加投放策略的投放追踪位置的步骤包括:
29、若所述火灾扑灭阶段为初期,则控制多架所述消防无人机的投放追踪位置均位于火焰上方受灾范围内;
30、若所述火灾扑灭阶段为中期,则控制多架所述消防无人机的投放追踪位置分别位于火焰上方受灾范围内和火焰周围设定范围的建筑物上方;
31、若所述火灾扑灭阶段为后期,则控制多架所述消防无人机的投放追踪位置均位于火焰正上方。
32、进一步地,所述受灾范围和所述设定范围根据所述火焰三维切片中的火焰高度和面积计算确定。
33、进一步地,多架所述消防无人机的投放追踪位置位于所述受灾范围内时,其位于火焰上方的不同方位对火焰形成围合;
34、多架所述消防无人机的投放追踪位置位于所述设定范围内时,其位于建筑物上方的多个点位对建筑物形成阵列覆盖。
35、上述方案中,实现了消防无人机在火灾初期对火焰进行迅速地冷却和隔绝,消防无人机在火灾中期扩大灭火范围,消防无人机在火灾后期扩大灭火范围加强灭火效果、有效防止复燃。
36、进一步地,根据投放追踪位置和三维温度场图像确定消防无人机的激光通信传能系统的控制参数和激光参数的步骤包括:
37、所述消防无人机根据所述投放追踪位置和光斑位置的差值通过设定所述激光通信传能系统的pid控制算法的比例参数、积分参数和微分参数进行粗跟踪,其中,所述比例参数、所述积分参数和所述微分参数根据所述三维温度场图像中的火焰高度和面积确定;
38、所述消防无人机根据所述投放追踪位置和激光发射端的距离设定所述激光通信传能系统的激光波长。
39、上述方案中,实现了根据三维温度场图像反映的火灾情况,保证火灾产生的大气干扰对激光通信传能系统的影响较小,消防无人机以不同的灵敏度进行动态pid调节以适应火灾情况。
40、与现有技术相比,本发明的有益效果在于,
41、1、将热成像摄像头、近景摄像头和三维激光摄像头的采集图像通过卷积神经网络模型和图像配准融合模型,进行融合,生成了可反映火灾高度、火灾温度的精准、可视化的三维温度场图像。
42、2、实现了根据三维温度场图像中反映的多种火焰/火灾信息,实现了对火灾扑灭阶段的精准识别。
43、3、实现了消防无人机在火灾初期对火焰进行迅速地冷却和隔绝,消防无人机在火灾中期扩大灭火范围,消防无人机在火灾后期扩大灭火范围加强灭火效果、有效防止复燃。
44、4、保证火灾产生的大气干扰对激光通信传能系统的影响较小,消防无人机以不同的灵敏度进行动态pid调节以适应火灾情况。
- 还没有人留言评论。精彩留言会获得点赞!