一种全角度全自动镜片载物盘信息喷涂装置的制作方法
1.本实用新型涉及光学镜头技术领域,尤其涉及一种全角度全自动镜片载物盘信息喷涂装置。
背景技术:
2.手机镜头通常批量生产且存放在镜片物料盘上,由于种类批次多样化及可追溯性,需要进行人工标识。传统人工贴标签效率低,时间长,还会降低产品的外观良率。
技术实现要素:
3.鉴于现有技术的上述缺点、不足,本实用新型提供一种全角度全自动镜片载物盘信息喷涂装置,其解决了现有技术中人工贴标签效率低,产品的外观良率低等技术问题。
4.为了达到上述目的,本实用新型采用的主要技术方案包括:
5.本实用新型实施例提供一种全角度全自动镜片载物盘信息喷涂装置,包括架体,定位工装机构,旋转机构,第一驱动机构和第二驱动机构;定位工装机构设置在架体的上部,用于固定镜片载物盘;定位工装机构的下部与旋转机构连接,以使定位工装机构在水平方向旋转;旋转机构的下部与第一驱动机构连接,通过第一驱动机构驱动旋转机构以及旋转机构上部的定位工装机构沿水平方向移动;第二驱动机构固定在架体上,第二驱动机构的上部与喷码机头连接,以驱动喷码机头沿竖直方向移动,对镜片载物盘上的镜片进行喷涂。
6.进一步地,定位工装机构包括限位板、推进板、推进气缸和下法兰板;限位板设置在下法兰板的一端上部,推进气缸设置在下法兰板的另一端上部,推进气缸与推进板连接,用于驱动推进板在下法兰板上移动,使推进板与限位板配合以固定镜片载物盘;下法兰板的下部与旋转机构连接,通过旋转机构旋转,带动下法兰板和下法兰板上部的镜片载物盘旋转。
7.进一步地,旋转机构包括旋转气缸、螺纹杆、连接板、升降调控板和调控螺母;旋转气缸的下部设置连接板,连接板通过螺纹杆与下方的升降调控板连接,螺纹杆上设有调控螺母,通过调控螺母调节连接板上方的旋转气缸的角度;升降调控板的下部与第一驱动机构连接,通过第一驱动机构驱动升降调控板以及升降调控板上方的旋转气缸沿水平方向移动。
8.进一步地,连接板的底部四个角分别与四根螺纹杆的一端连接,四根螺纹杆的另一端分别穿过升降调控板的四个角;螺纹杆上的调控螺母设置在升降调控板的上部,与升降调控板配合以调节连接板上方的旋转气缸的角度。
9.进一步地,第一驱动机构包括第一伺服电机、悬挂部件、连接横板、第一滚动丝杆副和滑动部件;连接横板的一侧与悬挂部件连接,悬挂部件固定在架体上;连接横板的上部设置有第一伺服电机和第一滚动丝杆副,第一伺服电机的动力输出端与第一滚动丝杆副连接,第一滚动丝杆副上设置有滑动部件;滑动部件的上部与旋转机构连接,以带动旋转机构
沿水平方向移动。
10.进一步地,滑动部件包括滑块和与滑块配合的滑轨,滑块设置在第一滚动丝杆副的丝杆上,滑轨设置在连接横板上;通过第一滚动丝杆副的丝杆旋转带动滑块在滑轨上沿水平方向移动。
11.进一步地,第二驱动机构包括第二伺服电机、连接竖板、第二滚动丝杆副、滑杆、顶升部件和机头固定块;连接竖板的第一侧面固定在架体上,连接竖板的第二侧面下部与第二伺服电机连接,连接竖板的第二侧面上部与滑杆连接;滑杆上滑动设置有顶升部件;第二伺服电机的动力输出端与第二滚动丝杆副连接,第二滚动丝杆副的上部与顶升部件连接,以带动顶升部件在滑杆上沿竖直方向移动;顶升部件的上部设置机头固定块,用于固定喷码机头。
12.本实用新型的有益效果是:本实用新型的一种全角度全自动镜片载物盘信息喷涂装置,由于采用第一驱动机构和旋转机构驱动定位工装机构在水平方向移动以及360
°
旋转,采用第二驱动机构驱动喷码机头沿竖直方向移动,相对于现有技术而言,其可以实现镜片自动化喷码标识,达到了高速、高效精准定位喷码标识的效果。
13.本实用新型可以提升产品的外观良率,通过统计将提升产品的外观良率20%,减少30%的贴标时间,提高贴标的工作效率。
附图说明
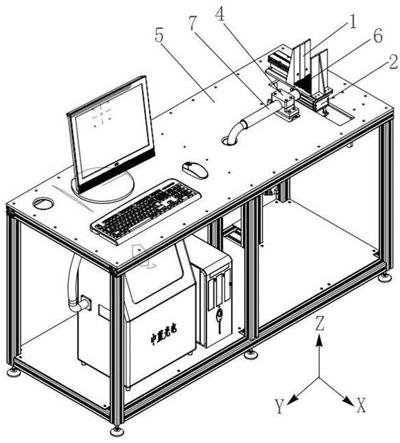
14.图1为本实用新型的一种全角度全自动镜片载物盘信息喷涂装置的整体结构示意图;
15.图2为图1中的局部结构示意图;
16.图3为本实用新型的定位工装机构结构示意图;
17.图4为本实用新型的旋转机构结构示意图;
18.图5为本实用新型的第一驱动机构结构示意图;
19.图6为本实用新型的第二驱动机构结构示意图。
20.图中:
21.1:定位工装机构;11:限位板;12:推进板;13:推进气缸;14:下法兰板;
22.2:旋转机构;21:旋转气缸;22:螺纹杆;23:连接板;24:升降调控板;25:调控螺母;
23.3:第一驱动机构;31:第一伺服电机;32:悬挂部件;33:连接横板;34:第一滚动丝杆副;35:滑轨;36:滑块;
24.4:第二驱动机构;41:第二伺服电机;42:连接竖板;43:第二滚动丝杆副;44:滑杆;45:顶升部件;46:机头固定块;
25.5:架体;
26.6:镜片载物盘;
27.7:喷码机头。
具体实施方式
28.为了更好的解释本实用新型,以便于理解,下面结合附图,通过具体实施方式,对本实用新型作详细描述。其中,本文所提及的“上”、“下”等方位名词以图1的定向为参照。
29.实施例1:
30.参照图1和图2,本实用新型提供一种全角度全自动镜片载物盘信息喷涂装置,该喷涂装置包括架体5,定位工装机构1,旋转机构2,第一驱动机构3和第二驱动机构4。架体5的上部为工作台,在工作台上沿x轴方向开设有一个矩形孔,旋转机构2置于矩形孔内,其可以在矩形孔内沿x轴方向移动,旋转机构2上的旋转轴可以在x轴方向旋转。其中,定位工装机构1设置在架体5的工作台上部,用于固定镜片载物盘6。定位工装机构1的下部与置于矩形孔内的旋转机构2固定连接,以使定位工装机构1在x轴方向旋转。旋转机构2的下部与第一驱动机构3固定连接,通过第一驱动机构3驱动旋转机构2以及旋转机构2上部的定位工装机构1沿x轴方向移动。第二驱动机构4固定在架体5上,第二驱动机构4的上部与喷码机头7固定连接,以驱动喷码机头7沿z轴方向移动,对镜片载物盘6上的镜片进行喷涂。本实施例中的x轴方向和z轴方向具体参照图1所示,其只是示例性的,并不对本实用新型做限制。
31.具体地,参照图3,定位工装机构1包括限位板11、推进板12、推进气缸13和下法兰板14。其中,限位板11固定设置在下法兰板14的一端上部,推进气缸13固定设置在下法兰板14的另一端上部,推进气缸13与推进板12连接,用于驱动推进板12在下法兰板14上移动,使推进板12与限位板11配合以固定镜片载物盘6。下法兰板14的下部与旋转机构2的旋转气缸21上的旋转轴连接,通过旋转机构2旋转,带动下法兰板14和下法兰板14上部的镜片载物盘6在x轴方向旋转。推进板12在推进气缸13的驱动下可在下法兰板14上移动,以对镜片载物盘6进行限位控制。
32.具体地,参照图4,旋转机构2包括旋转气缸21、螺纹杆22、连接板23、升降调控板24和调控螺母25。气压通过旋转气缸21,进而控制上部的旋转轴在x轴上实现镜片载物盘6任意面的旋转。旋转气缸21的下部固定设置连接板23,连接板23通过螺纹杆22与下方的升降调控板24连接,螺纹杆22上设有调控螺母25,通过调控螺母25调节连接板23上方的旋转气缸21的角度。具体地,连接板23的底部四个角分别与四根螺纹杆22的一端固定连接,四根螺纹杆22的另一端分别穿过升降调控板24的四个角,通过螺纹杆22上的调控螺母25调节螺纹杆22的有效高度。螺纹杆22上的调控螺母25设置在升降调控板24的上部,与升降调控板24配合以调节连接板23上方的旋转气缸21的角度。本实用新型可通过调控螺母25对旋转气缸21的角度进行微调,进而调节上方的镜片载物盘6的角度,以方便喷涂。升降调控板24的下部与第一驱动机构3的滑块36连接,通过第一驱动机构3驱动升降调控板24以及升降调控板24上方的旋转气缸21沿x轴方向移动。
33.具体地,参照图5,第一驱动机构3包括第一伺服电机31、悬挂部件32、连接横板33、第一滚动丝杆副34和滑动部件。其中,悬挂部件32为带有角板的l形板材,悬挂部件32的一个横板固定在架体5的工作台底面上,悬挂部件32的一个竖板与连接横板33的一侧固定连接。连接横板33的上部一端固定设置有第一伺服电机31,第一伺服电机31通过plc控制,第一伺服电机31的动力输出端与第一滚动丝杆副34连接,第一滚动丝杆副34上设置有滑动部件。具体地,滑动部件包括滑块36和与滑块36配合的滑轨35,滑块36设置在第一滚动丝杆副34的丝杆上,滑轨35设置在连接横板33上。通过第一滚动丝杆副34的丝杆旋转带动滑块36在滑轨35上沿x轴方向移动。滑动部件的滑块36上部与旋转机构2的升降调控板24的下部固定连接,以带动旋转机构2沿x轴方向移动。本实用新型通过plc控制第一伺服电机31实现定位工装机构1上的镜片载物盘6在x轴方向高速、高精准的移动定位。
34.当然,本实用新型的第一驱动机构3不限于上述结构,也可以包括电动伸缩杆,电动伸缩杆的端部设置有连接块,用于连接旋转机构2的升降调控板24,通过电动伸缩杆带动旋转机构2以及其上的定位工装机构1沿x轴方向移动。
35.具体地,参照图6,第二驱动机构4包括第二伺服电机41、连接竖板42、第二滚动丝杆副43、滑杆44、顶升部件45和机头固定块46。连接竖板42的第一侧面固定在架体5上,连接竖板42的第二侧面下部与第二伺服电机41连接,连接竖板42的第二侧面上部与滑杆44通过l形板材连接。具体地,滑杆44的两端分别固定在两个l形板材上,两个l形板材固定在连接竖板42上。滑杆44上滑动设置有顶升部件45;滑杆44穿过顶升部件45的一端,使顶升部件45可以在滑杆44上滑动。第二伺服电机41通过plc控制,第二伺服电机41的动力输出端与第二滚动丝杆副43连接,第二滚动丝杆副43的上部与顶升部件45连接,以带动顶升部件45在滑杆44上沿z轴方向移动。顶升部件45的上部设置机头固定块46,用于固定喷码机头7。具体地,顶升部件45为z形板材,z形板材的下部套接在滑杆44上,z形板材的上部固定有机头固定块46。机头固定块46包括上部固定块和下部固定块,上部固定块和下部固定块通过螺栓连接,上部固定块和下部固定块对接之后形成圆形通孔,用于固定喷码机头7。本实用新型通过plc控制第二伺服电机41实现喷码机头7在z轴方向高速、高精准的移动定位。
36.当然,本实用新型的第二驱动机构4不限于上述结构,也可以包括电动伸缩杆,电动伸缩杆的端部设置有机头固定块46,用于固定喷码机头7,通过电动伸缩杆带动固定喷码机头7沿z轴方向移动,以对镜片载物盘6上的镜片进行喷涂。
37.本实用新型的运动机理为:镜片载物盘6固定在定位工装机构1内,通过第一驱动机构3实现在x轴方向往复运动,每一次单向运动镜片载物盘6经过喷码机进行一次喷码;每喷码一次,同步旋转机构2旋转,可对镜片载物盘6任意面进行喷码;每喷码两次,同步第二运动机构4沿z轴方向移动镜片载物盘6相应厚度距离一次。
38.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行改动、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1