立体物印刷方法以及立体物印刷装置与流程
1.本公开涉及一种立体物印刷方法以及立体物印刷装置。
背景技术:
2.已知一种通过喷墨方式而在立体工件的表面上实施印刷的立体物印刷装置。例如,专利文献1所记载的装置具有机械臂、和被固定在机械臂的顶端处的打印头以及紫外线放射装置,并将由来自打印头的油墨形成的图像印刷在对象物上。在此,紫外线放射装置放射出使对象物上的油墨硬化的紫外线。
3.在专利文献1中,并未对紫外线对于对象物上的油墨的放射进行具体的记载,但是期望使油墨适当地硬化。
4.专利文献1:日本特开2014-050832号公报
技术实现要素:
5.为了解决以上的课题,本公开所涉及的立体物印刷方法的一个方式使用了如下部件,即:头,其具有设置有喷出液体的喷嘴的喷出面;能量出射部,其具有出射使从所述头被喷出的液体硬化或固化的能量的出射面;移动机构,其使所述头以及所述能量出射部相对于立体工件的相对位置发生变化,在所述立体物印刷方法中,包括第一动作和第二动作,其中,所述第一动作为,同时地执行由所述头实施的液体向所述工件的喷出、由所述能量出射部实施的能量向所述工件的出射、和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动的动作,所述第二动作为,后续于所述第一动作而同时地执行由所述能量出射部实施的能量向所述工件的出射和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动、且不执行由所述头实施的液体向所述工件的喷出的动作,并且,第一照射距离与第二照射距离户部互不相同,所述第一照射距离为所述第一动作的执行过程中的沿着所述出射面的法线方向的所述工件与所述出射面之间的距离,所述第二照射距离为所述第二动作的执行过程中的沿着所述出射面的法线方向的所述工件与所述出射面之间的距离。
6.本公开所涉及的立体物印刷方法的另一个方式使用了如下部件,即:头,其具有设置有喷出液体的喷嘴的喷出面;能量出射部,其具有出射使从所述头被喷出的液体硬化或固化的能量的出射面;移动机构,其使所述头以及所述能量出射部相对于立体工件的相对位置发生变化,在所述立体物印刷方法中,包括第一动作和第二动作,其中,所述第一动作为,同时地执行由所述头实施的液体向所述工件的喷出、由所述能量出射部实施的能量向所述工件的出射、和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动的动作,所述第二动作为,后续于所述第一动作而同时地执行由所述能量出射部实施的能量向所述工件的出射和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动、且不执行由所述头实施的液体向所述工件的喷出的动作,并且,第一角度与第二角度互不相同,所述第一角度为所述第一动作的执行过程中的所述喷出面与
所述工件的和所述喷出面对置的面所成的角度,所述第二角度为所述第二动作的执行过程中的所述喷出面与所述工件的和所述喷出面对置的面所成的角度。
7.本公开所涉及的立体物印刷装置的一个方式具备:头,其具有设置有喷出液体的喷嘴的喷出面;能量出射部,其具有出射使从所述头被喷出的液体硬化或固化的能量的出射面;移动机构,其使所述头以及所述能量出射部相对于立体工件的相对位置发生变化,所述立体物印刷装置执行第一动作和第二动作,其中,所述第一动作为,同时地执行由所述头实施的液体向所述工件的喷出、由所述能量出射部实施的能量向所述工件的出射、和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动的动作,所述第二动作为,后续于所述第一动作而同时地执行由所述能量出射部实施的能量向所述工件的出射和由所述移动机构实现的所述头以及所述能量出射部相对于所述工件的相对移动、且不执行由所述头实施的液体向所述工件的喷出的动作,并且,第一照射距离与第二照射距离互不相同,所述第一照射距离为所述第一动作的执行过程中的沿着所述出射面的法线方向的所述工件与所述出射面之间的距离,所述第二照射距离为所述第二动作的执行过程中的沿着所述出射面的法线方向的所述工件与所述出射面之间的距离。
附图说明
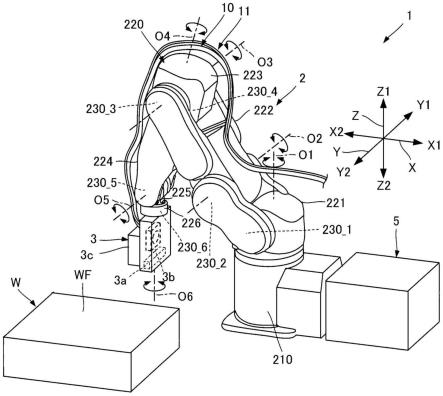
8.图1为表示第一实施方式所涉及的立体物印刷装置的概要的立体图。
9.图2为表示第一实施方式所涉及的立体物印刷装置的电气结构的框图。
10.图3为表示头单元的概要结构的立体图。
11.图4为表示第一实施方式所涉及的立体物印刷方法的流程图。
12.图5为用于对机械臂的示教进行说明的图。
13.图6为用于对喷出距离以及照射距离进行说明的图。
14.图7为用于对第一实施方式中的第一动作进行说明的图。
15.图8为用于对第一实施方式中的第二动作进行说明的图。
16.图9为用于对第二实施方式中的第二动作进行说明的图。
17.图10为用于对第三实施方式中的第二动作进行说明的图。
18.图11为用于对第四实施方式中的第二动作进行说明的图。
具体实施方式
19.以下,在参照附图的同时,对本公开所涉及的优选的实施方式进行说明。另外,在各附图中,各部分的尺寸以及比例尺与实际情况适当地有所不同,并且还具有为了易于理解而示意性地示出的部分。此外,在以下的说明中,只要没有特别对本公开进行限定的记载,则本公开的范围并不限于这些方式。
20.为了便于说明,以下的说明适当地使用相互交叉的x轴、y轴以及z轴来进行。此外,在以下的说明中,沿着x轴的一个方向为x1方向,且与x1方向相反的方向为x2方向。同样地,沿着y轴而彼此相反的方向为y1方向以及y2方向。此外,沿着z轴而彼此相反的方向为z1方向以及z2方向。
21.在此,x轴、y轴以及z轴相当于在设置有后文叙述的机械臂2的空间内所设定的通用坐标系的坐标轴。典型而言,z轴为铅直的轴,且z2方向相当于铅直方向上的下方向。以机
械臂2的后文叙述的基部210的位置为基准的基准坐标系通过校准而与该通用坐标系建立对应关系。在下文中,为了便于说明,对将通用坐标系作为机械臂坐标系来使用以对机械臂2的动作进行控制的情况进行例示。
22.另外,z轴也可以不为铅直的轴。此外,虽然x轴、y轴以及z轴典型而言为相互正交,但是并不限定于此,也存在不正交的情况。例如,x轴、y轴以及z轴只需以80
°
以上且100
°
以下的范围内的角度而相互交叉即可。
23.1.第一实施方式
24.1-1.立体物印刷装置的概要
25.图1为表示第一实施方式所涉及的立体物印刷装置1的概要的立体图。立体物印刷装置1为通过喷墨方式而在立体工件w的表面上实施印刷的装置。
26.工件w具有成为印刷对象的面wf。在图1所示的示例中,工件w为长方体,且面wf为平面。印刷时的工件w根据需要而例如通过预定的设置台、机械臂抓手或传送带等结构体来被支承。另外,工件w或面wf的形状或大小等方式并不限定于图1所示的示例,而是为任意的方式。例如,面wf也可以具有弯曲或屈曲而成的部分。此外,工件w或面wf在印刷时的位置或姿态只要能够进行印刷即可,并不限定于图1所示的示例,而是为任意的位置或姿态。
27.如图1所示,立体物印刷装置1具有作为“移动机构”的一个示例的机械臂2、头单元3、控制器5、配管部10和配线部11。以下,首先对它们依次进行简单说明。
28.机械臂2为使通用坐标系中的头单元3的位置以及姿态发生变化的机械臂。在图1所示的示例中,机械臂2为所谓的六轴垂直多关节机械臂。
29.如图1所示,机械臂2具有基部210和臂部220。
30.基部210为对臂部220进行支承的台。在图1所示的示例中,基部210通过螺钉固定等而被固定在朝向z1方向的地板面或基台等的设置面上。另外,固定有基部210的设置面可以为朝向任意方向的面,并不限定于图1所示的示例,并且也可以为例如墙壁、顶棚、可移动的平板车等所具有的面。
31.臂部220为,具有被安装在基部210上的基端和相对于该基端而使位置以及姿态三维地发生变化的顶端的六轴的机械臂。具体而言,臂部220具有也被称为联杆的臂221、222、223、224、225以及226,且它们按照此顺序而被连结。
32.臂221以能够围绕转动轴o1进行转动的方式经由关节部230_1而与基部210连结。臂222以能够围绕转动轴o2进行转动的方式经由关节部230_2而与臂221连结。臂223以能够围绕转动轴o3进行转动的方式经由关节部230_3而与臂222连结。臂224以能够围绕转动轴o4进行转动的方式经由关节部230_4而与臂223连结。臂225以能够围绕转动轴o5进行转动的方式经由关节部230_5而与臂224连结。臂226以能够围绕转动轴o6进行转动的方式经由关节部230_6而与臂225连结。
33.关节部230_1至230_6中的每一个为“转动部”的一个示例,且为将基部210以及臂221至226中的彼此相邻的两个部件中的一方以能够转动的方式而连结于另一方的机构。另外,在下文中,有时会将关节部230_1至230_6中的每一个称为“关节部230”。
34.虽然在图1中并未图示,但是在关节部230_1至230_6中的每一个上设置有驱动机构,所述驱动机构使所对应的该彼此相邻的两个部件中的一方相对于另一方而进行转动。该驱动机构例如具有产生用于进行该转动的驱动力的电机、对该驱动力进行减速并输出的
减速器、和对该转动的角度等的动作量进行检测的旋转式编码器等编码器。另外,关节部230_1至230_6的该驱动机构的集合体相当于后文叙述的图2所示的臂驱动机构2a。
35.转动轴o1为相对于固定有基部210的未图示的设置面而垂直的轴。转动轴o2为相对于转动轴o1而垂直的轴。转动轴o3为相对于转动轴o2而平行的轴。转动轴o4为相对于转动轴o3而垂直的轴。转动轴o5为相对于转动轴o4而垂直的轴。转动轴o6为相对于转动轴o5而垂直的轴。
36.另外,对于这些转动轴而言,“垂直”除了包括两个转动轴所成的角度严格为90
°
的情况之外,也包括两个转动轴所成的角度从90
°
而在
±5°
左右的范围内发生偏移的情况。同样地,“平行”除了包括两个转动轴严格地平行的情况之外,也包括两个转动轴中的一方相对于另一方而在
±5°
左右的范围内倾斜的情况。
37.在以上的机械臂2的臂部220的位于最顶端的臂226上,作为末端执行器而以通过螺纹固定等被固定的状态安装有头单元3。
38.头单元3为具有朝向工件w喷出作为“液体”的一个示例的油墨的头3a的组件。在本实施方式中,头单元3除了具有头3a之外,还具有压力调节阀3b和能量出射部3c。另外,关于头单元3的详细内容,将基于后文叙述的图3来进行说明。
39.作为该油墨并未被特别限定,例如可列举出使染料或颜料等颜色材料溶解在水系溶剂中的水系油墨、紫外线硬化型等的使用了硬化性树脂的硬化性油墨、以及使染料或颜料等颜色材料溶解在有机溶剂中的溶剂类油墨等。其中,优选地使用硬化性油墨。虽然硬化性油墨并未被特别限定,其例如也可以为热硬化型、光硬化型、放射线硬化型以及电子束硬化型中的任意一种,但是优选为紫外线硬化型等光硬化型。另外,该油墨并不限定于溶液,也可以为使颜色材料等作为分散质而分散在分散剂中的油墨。此外,该油墨并不限定于包含颜色材料的油墨,例如既可以为作为分散质而包含用于形成配线等的金属粒子等导电性粒子的油墨,也可以为透明油墨,还可以为用于工件w的表面处理的处理液。
40.在头单元3上分别连接有配管部10以及配线部11。配管部10为将来自未图示的油墨罐的油墨供给至头单元3的配管或配管组。配线部11为供给对头3a进行驱动的电信号的配线或配线组。
41.控制器5为对机械臂2的驱动进行控制的机械臂控制器。以下,基于图2,以使控制器5的详细说明包括在内的方式来对立体物印刷装置1的电气结构进行说明。
42.1-2.立体物印刷装置的电气结构
43.图2为表示第一实施方式所涉及的立体物印刷装置1的电气结构的框图。在图2中,示出了立体物印刷装置1的结构要素中的电气结构要素。如图2所示,立体物印刷装置1除了具有前文所述的图1所示的结构要素之外,还具有与控制器5以能够通信的方式而连接的控制模块6、和与控制器5以及控制模块6以能够通信的方式而连接的计算机7。
44.另外,图2所示的各电气结构要素既可以适当地被分割,也可以使其一部分被包含在其他结构要素中,还可以与其他结构要素被一体构成。例如,控制器5或控制模块6的功能的一部分或全部既可以通过计算机7来实现,也可以通过经由lan(local area network:局域网)或互联网等网络而与控制器5连接的pc(personal computer:个人计算机)等其他外部装置来实现。
45.控制器5具有对机械臂2的驱动进行控制的功能、和生成用于使头单元3中的油墨
的喷出动作与机械臂2的动作同步的信号d3的功能。
46.控制器5具有存储电路5a和处理电路5b。
47.存储电路5a对处理电路5b所执行的各种程序、和处理电路5b所处理的各种数据进行存储。存储电路5a例如包括ram(random access memory:随机存取存储器)等易失性的存储器和rom(read only memory:只读存储器)、eeprom(electrically erasable programmable read-only memory:电可擦可编程只读存储器)或prom(programmable rom:可编程只读存储器)等非易失性存储器中的一方或双方的半导体存储器。另外,存储电路5a的一部分或全部也可以被包括在处理电路5b中。
48.在存储电路5a中存储有示教点信息da以及路径信息db。示教点信息da为表示头单元3应当移动的路径上的多个位置和该多个位置中的每个位置处的头单元3的姿态的信息。示教点信息da例如基于通过直接示教或离线示教等所取得的信息而被生成。示教点信息da例如使用基准坐标系或通用坐标系的坐标值来表示。路径信息db为表示头单元3应当移动的路径和该路径上的头单元3的姿态的信息。路径信息db使用示教点信息da而被生成。更具体而言,路径信息db除了使用示教点信息da之外,还使用工件w的形状等而被生成。路径信息db例如使用基准坐标系或通用坐标系的坐标值来表示。工件w的形状例如通过表示工件w的三维形状的cad(computer-aided design:计算机辅助设计)数据而获得。以上的路径信息db从计算机7被输入至存储电路5a。
49.处理电路5b基于路径信息db来对机械臂2的臂驱动机构2a的动作进行控制,并且生成信号d3。处理电路5b例如包括一个以上的cpu(central processing unit:中央处理器)等处理器。另外,处理电路5b也可以代替cpu或除cpu以外还包括fpga(field-programmable gate array:现场可编程逻辑门阵列)等可编程逻辑器件。
50.在此,臂驱动机构2a为前文所述的关节部230_1至230_6的驱动机构的集合体,并且针对每个关节部而具有用于对机械臂2的关节部进行驱动的电机、和对机械臂2的关节部的旋转角度进行检测的编码器。
51.处理电路5b实施将路径信息db转换为机械臂2的各关节的旋转角度以及旋转速度等的动作量的运算、即逆运动学计算。而且,处理电路5b基于来自臂驱动机构2a的各编码器的输出d1而输出控制信号sk1,以使该各关节的实际的旋转角度以及旋转速度等动作量成为基于路径信息db而得到的前文所述的运算结果。控制信号sk1为用于对臂驱动机构2a的电机的驱动进行控制的信号。在此,控制信号sk1根据需要且基于来自未图示的距离传感器的输出而由处理电路5b进行补正。
52.此外,处理电路5b基于来自臂驱动机构2a的多个编码器中的至少一个的输出d1而生成信号d3。例如,处理电路5b作为信号d3而生成触发信号,所述触发信号包含来自该多个编码器中的一个的输出d1成为预定值的定时的脉冲。
53.控制模块6为基于从控制器5输出的信号d3和来自计算机7的印刷数据而对头单元3中的油墨的喷出动作进行控制的电路。控制模块6具有定时信号生成电路6a、电源电路6b、控制电路6c和驱动信号生成电路6d。
54.定时信号生成电路6a基于信号d3而生成定时信号pts。定时信号生成电路6a例如由计时器构成,所述计时器以信号d3的检测出为契机而开始进行定时信号pts的生成。
55.电源电路6b从未图示的商用电源接受电力的供给,并生成预定的各种电位。所生
成的各种电位适当地被供给至控制模块6以及头单元3的各部分。例如,电源电路6b生成电源电位vhv和偏移电位vbs。偏移电位vbs被供给至头单元3。此外,电源电位vhv被供给至驱动信号生成电路6d。
56.控制电路6c基于定时信号pts而生成控制信号si、波形指定信号dcom、锁存信号lat、时钟信号clk和交换信号cng。这些信号与定时信号pts同步。这些信号中的波形指定信号dcom被输入至驱动信号生成电路6d中,除此以外的信号被输入至头单元3的开关电路3e中。
57.控制信号si为用于对头单元3的头3a所具有的驱动元件的工作状态进行指定的数字的信号。具体而言,控制信号si基于印刷数据而对是否向该驱动元件供给后文叙述的驱动信号com进行指定。通过该指定,从而例如对是否从与该驱动元件相对应的喷嘴喷出油墨进行指定,或者对从该喷嘴被喷出的油墨的量进行指定。波形指定信号dcom为用于对驱动信号com的波形进行规定的数字信号。锁存信号lat以及交换信号cng通过以与控制信号si并用的方式来对该驱动元件的驱动定时进行规定,从而对来自该喷嘴的油墨的喷出定时进行规定。时钟信号clk为成为与定时信号pts同步的基准的时钟信号。
58.以上的控制电路6c例如包括一个以上的cpu(central processing unit)等处理器。另外,控制电路6c也可以代替cpu或除cpu以外还包括fpga(field-programmable gate array)等可编程逻辑器件。
59.驱动信号生成电路6d为生成用于对头单元3的头3a所具有的各驱动元件进行驱动的驱动信号com的电路。具体而言,驱动信号生成电路6d例如具有da转换电路和放大电路。在驱动信号生成电路6d中,通过该da转换电路将来自控制电路6c的波形指定信号dcom从数字信号转换为模拟信号、并由该放大电路使用来自电源电路6b的电源电位vhv而将该模拟信号放大,从而生成驱动信号com。在此,驱动信号com中所包含的波形中的、实际被供给至该驱动元件的波形的信号为驱动脉冲pd。驱动脉冲pd经由头单元3的开关电路3e而从驱动信号生成电路6d被供给至该驱动元件。
60.在此,开关电路3e为,包括基于控制信号si而对是否将驱动信号com中所包含的波形中的至少一部分作为驱动脉冲pd来供给进行切换的开关元件在内的电路。
61.计算机7具有向控制器5供给示教点信息da以及路径信息db等信息的功能、和向控制模块6供给印刷数据等信息的功能。本实施方式的计算机7除了这些功能之外,还具有对能量出射部3c的驱动进行控制的功能、和生成示教点信息da以及路径信息db的功能。计算机7例如为安装了实现这些功能的程序的台式或笔记本式等的计算机。
62.1-3.头单元的结构
63.图3为表示头单元3的概要结构的立体图。在以下的说明中,为了便于说明而适当地使用相互交叉的a轴、b轴以及c轴来进行。此外,在以下的说明中,沿着a轴的一个方向为a1方向,与a1方向相反的方向为a2方向。同样地,沿着b轴而彼此相反的方向为b1方向以及b2方向。此外,沿着c轴而彼此相反的方向为c1方向以及c2方向。
64.在此,a轴、b轴以及c轴相当于被设定于头单元3中的工具坐标系的坐标轴,且与前文所述的通用坐标系或机械臂坐标系的相对位置以及姿态的关系通过前文所述的机械臂2的动作而发生变化。在图3所示的示例中,c轴为与前文所述的转动轴o6平行的轴。另外,虽然a轴、b轴以及c轴典型而言为相互正交,但是并不限定于此,例如其只需以80
°
以上且100
°
以下的范围内的角度而交叉即可。另外,工具坐标系与基准坐标系或机械臂坐标系通过校准而被建立对应关系。此外,工具坐标系例如以后文叙述的喷出面fn的中心成为基准(tcp:工具中心点)的方式而被设定。
65.如前文所述,头单元3具有头3a、压力调节阀3b和能量出射部3c。它们被图3中的由双点划线所示的支承体3f所支承。另外,虽然在图3所示的示例中头单元3所具有的头3a以及压力调节阀3b中的各自的数量为一个,但是该数量并不限定于图3所示的示例,也可以为两个以上。此外,压力调节阀3b的设置位置并不限定于臂226,例如既可以为其他臂等,也可以为相对于基部210而固定的位置。
66.支承体3f例如由金属材料等而构成,且为实质上的刚体。另外,虽然在图3中支承体3f呈扁平的箱状,但是支承体3f的形状并未被特别限定,而是为任意的形状。
67.以上的支承体3f被安装在前文所述的臂226上。因此,头3a、压力调节阀3b以及能量出射部3c通过支承体3f而被一并地支承在臂226上。因此,头3a、压力调节阀3b以及能量出射部3c的各自相对于臂226的相对位置被固定。在图3所示的示例中,在相对于头3a而靠c1方向的位置处配置有压力调节阀3b。在相对于头3a而靠a2方向的位置处配置有能量出射部3c。
68.头3a具有喷出面fn、和在喷出面fn上开口的多个喷嘴n。喷出面fn为供喷嘴n开口的喷嘴面,其例如由喷嘴板的面而构成,在所述喷嘴板中,喷嘴n作为贯穿孔而被设置在由硅(si)或金属等材料所构成的板状部件上。在图3所示的示例中,喷出面fn的法线方向为c2方向,且该多个喷嘴n被划分为在沿着a轴的方向上以相互隔开间隔的方式而排列的喷嘴列l1和喷嘴列l2。喷嘴列l1以及喷嘴列l2中的每一个为在沿着b轴的方向上排列成直线状的多个喷嘴n的集合。在此,头3a中的与喷嘴列l1的各喷嘴n相关联的要素和与喷嘴列l2的各喷嘴n相关联的要素为在沿着a轴的方向上相互大致对称的结构。此外,后文叙述的排列方向dn与b轴平行。
69.但是,喷嘴列l1中的多个喷嘴n和喷嘴列l2中的多个喷嘴n的沿着b轴的方向上的位置既可以相互一致也可以互不相同。此外,也可以省略与喷嘴列l1以及喷嘴列l2中的一方的各喷嘴n相关联的要素。在下文中,对喷嘴列l1中的多个喷嘴n和喷嘴列l2中的多个喷嘴n的沿着b轴的方向上的位置相互一致的结构进行例示。
70.虽然并未图示,但是头3a针对每个喷嘴n而具有作为驱动元件的压电元件、和对油墨进行收纳的空腔。在此,该压电元件通过使与该压电元件相对应的空腔的压力发生变化,从而使油墨从与该空腔相对应的喷嘴喷出。这样的头3a通过利用粘合剂等来将由蚀刻等方式适当地进行了加工的硅基板等多个基板贴合在一起而获得。另外,作为用于使油墨从喷嘴喷出的驱动元件,也可以代替该压电元件而使用对空腔内的油墨进行加热的加热器。
71.如前文所述,在以上的头3a中,经由供给管10a而从未图示的油墨罐供给有油墨。在此,在供给管10a与头3a之间设置有压力调节阀3b。
72.压力调节阀3b为根据头3a内的油墨的压力而进行开闭的阀机构。通过该开闭,从而即使头3a与前文所述的未图示的油墨罐的位置关系发生变化,头3a内的油墨的压力也会被维持为预定范围内的负压。因此,实现了头3a的喷嘴n中所形成的油墨的弯液面的稳定化。其结果为,防止了气泡进入喷嘴n内、或者油墨从喷嘴n溢出的情况。此外,来自压力调节阀3b的油墨经由未图示的分支流道而被适当地分配至头3a的多个部位。在此,来自未图示
的油墨罐的油墨通过泵等而以预定的压力被运送至供给管10a内。
73.能量出射部3c出射用于使工件w上的油墨硬化或固化的光、热、电子束或放射线等能量。例如,在油墨具有紫外线硬化性的情况下,能量出射部3c由出射紫外线的led(light emitting diode,发光二极管)等发光元件等而构成。此外,能量出射部3c也可以适当地具有用于对能量的出射方向或出射范围等进行调节的透镜等光学部件等。
74.另外,能量出射部3c也可以不使工件w上的油墨完全硬化或完全固化。在这种情况下,例如只需通过来自被另外设置在机械臂2的基部210的设置面上的硬化用的光源的能量而使来自能量出射部3c的能量照射后的油墨完全硬化或完全固化即可。
75.1-4.立体物印刷方法
76.图4为表示第一实施方式所涉及的立体物印刷方法的流程图。以下,针对该立体物印刷方法,而以使用了前文所述的立体物印刷装置1的情况为例来进行说明。
77.图4所示的立体物印刷方法包括取得示教点信息da的步骤s10、使用示教点信息da来生成路径信息db的步骤s20、和使用路径信息db来实施印刷动作的步骤s30。在此,步骤s30包括第一动作s31和第二动作s32。第一动作s31在通过机械臂2而使头3a以及能量出射部3c的位置发生变化的同时,对于工件w而实施来自头3a的油墨的喷出和来自能量出射部3c的能量的照射。第二动作s32在通过机械臂2而使头3a以及能量出射部3c的位置发生变化的同时,对于工件w而在不实施来自头3a的油墨的喷出的条件下实施来自能量出射部3c的能量的照射。以下,对各步骤进行说明。
78.图5为用于对机械臂2的示教进行说明的图。在图5中,例示了作为示教点而使用第一示教点pt1_1至pt_3以及第二示教点pt2的情况。在下文中,存在不对第一示教点pt1_1至pt1_3进行区分而将它们中的每一个称为第一示教点pt1的情况。另外,在下文中,例示了以喷出面fn的中心为tcp来对头单元3的移动路径ru进行示教的情况。
79.首先,对在步骤s10中应当向机械臂2示教的头3a的移动路径ru进行说明。在图5中,例示了工件w的面wf为与z轴正交的平面、且工件w被载置在与机械臂2相比靠x2方向的位置处的情况。
80.在后文叙述的步骤s30的印刷动作中,机械臂2使六个关节部230中的三个关节部230进行动作。在图5所示的示例中,机械臂2在印刷动作的执行过程中使关节部230_2、关节部230_3和关节部230_5的各自的转动轴成为与y轴平行的状态,并使这些关节部进行动作。如此,能够通过三个关节部230的动作来使头3a沿着移动路径ru而稳定地进行移动。
81.移动路径ru为从位置p1起至位置p3为止的路径。移动路径ru呈在z2方向上进行观察时沿着x轴而延伸的直线状。此外,移动路径ru通过位置p2而被划分为从位置p1起至位置p2为止的路径、和从位置p2起至位置p3为止的路径。从位置p1起至位置p2为止的路径为第一动作s31中的头3a的移动路径。从位置p2起至位置p3为止的路径为第二动作s32中的头3a的移动路径。在此,第二动作s32中的头3a的移动路径的长度与第一动作s31中的头3a的移动路径的长度相比而较短。另外,第一动作s31以及第二动作s32基于包括控制器5、控制模块6、计算机7在内的控制单元的指令而被执行。
82.此外,从位置p1起至位置p2为止的路径与面wf之间的距离被设定为固定。因此,从位置p1起至位置p2为止的路径为沿着面wf的路径。相对于此,从位置p2起至位置p3为止的沿着面wf的路径与面wf之间的距离会随着从位置p2趋向于位置p3而发生变化。因此,从位
置p2起至位置p3为止的路径为不沿着面wf的路径。在本实施方式中,从位置p2起至位置p3为止的沿着面wf的路径与面wf之间的距离会随着从位置p2趋向于位置p3而变大。
83.在步骤s10中,通过在线示教或离线示教等而获得与使喷出面fn的中心分别位于第一示教点pt1以及第二示教点pt2时的机械臂2的臂部220的姿态相关的信息。使用该信息而生成示教点信息da。
84.第一示教点pt1为用于进行第一动作s31的示教点,其位于从位置p1起至位置p2为止的沿着面wf的路径上。在图5所示的示例中,第一示教点pt1_1为位置p1,第一示教点pt1_2为位置p1与位置p2之间的位置,第一示教点pt1_3为位置p2。另外,第一示教点pt1的数量并不限定于三个,也可以为两个或四个以上。此外,也可以使第一示教点pt1_1的位置为与位置p1不同的位置,也可以使第一示教点pt1_3的位置为与位置p2不同的位置。
85.第二示教点pt2为用于进行第二动作s32的示教点,其位于从位置p2起至位置p3为止的路径上。在图5所示的示例中,第二示教点pt2为位置p3。另外,第二示教点pt2的数量并不限定于一个,也可以为两个以上。此外,也可以使第二示教点pt2的位置为与位置p3不同的位置。但是,由于在第二动作s32中不实施油墨从头3a的喷出,因此从示教作业的简化的观点出发,优先为,使第二示教点pt2的数量与第一示教点pt1的数量相比而较少。
86.使用以上这种第一示教点pt1以及第二示教点pt2而获得示教点信息da。所获得的示教点信息da在步骤s20中被用于路径信息db的生成。即,如前文所述,在步骤s20中,除了生成示教点信息da之外,例如使用表示工件w的三维形状的cad(computer-aided design)数据等而生成路径信息db。
87.以下,在进行第一动作s31以及第二动作s32的说明之前,基于图6而对喷出距离la以及照射距离lb进行说明。
88.图6为用于对喷出距离la以及照射距离lb进行说明的图。在图6中,为了便于说明,示出了以喷出面fn以及出射面fl各自相对于工件w的面wf而不平行的方式来使头单元3的姿态倾斜的状态。在图6所示的示例中,喷出面fn以及出射面fl相互平行,面wf与喷出面fn所成的角度θa和面wf与出射面fl所成的角度θb相等。另外,喷出面fn以及出射面fl也可以不相互平行。在这种情况下,角度θa以及角度θb互不相同。
89.喷出距离la为沿着喷出面fn的法线方向的工件w与喷出面fn之间的距离。换而言之,在从喷出面fn的中心pa1起延伸的法线与工件w的面wf于交点pa2处相交的情况下,喷出距离la为从中心pa1起至交点pa2为止的距离。此外,如图6中的由双点划线所示的那样,在从喷出面fn的中心pa1起延伸的法线与工件w的表面不相交的情况下,从喷出面fn的中心pa1起延伸的法线与将工件w的面wf延长而得到的假想平面fv的交点为交点pa2。另外,如从喷出面fn的中心pa1起延伸的法线相对于该假想平面fv而平行等的情况那样,在从喷出面fn的中心pa1起延伸的法线与该假想平面fv也不相交的情况下,喷出距离la为无限远。在此,油墨从喷嘴n喷出的喷出方向在理想条件下与喷出面fn的法线方向并行。
90.照射距离lb为,沿着出射面fl的法线方向的工件w与出射面fl之间的距离。换而言之,在从出射面fl的中心pb1起延伸的法线与工件w的面wf于交点pb2处相交的情况下,照射距离lb为从中心pb1起至交点pb2为止的距离。此外,如图6中由双点划线所示的那样,在从出射面fl的中心pb1起延伸的法线与工件w的表面不相交的情况下,从出射面fl的中心pb1起延伸的法线与将工件w的面wf延长而得到的假想平面fv的交点为交点pb2。另外,如从出
射面fl的中心pb1起延伸的法线相对于该假想平面fv而平行等的情况那样,在从出射面fl的中心pb1起延伸的法线与该假想平面fv也不相交的情况下,照射距离lb为无限远。
91.在图5所示的示例中,由于工件w的面wf为平面,因此角度θa被规定为喷出面fn与工件w的和喷出面fn对置的面所成的角度。另一方面,在工件w的表面为曲面的情况下,当在从喷出面fn的中心pa1起延伸的法线与工件w的表面的交点pa2处设定了假想切平面时,角度θa被规定为该切平面与喷出面fn所成的角度。在此,也可以说该假想切平面为和工件w的表面中的与喷出面fn对置的部分近似为平面的假想面。但是,在从喷出面fn的中心pa1起延伸的法线与工件w的表面不相交的情况下,角度θa为将工件w的表面延长而得到的假想平面fv与喷出面fn所成的角度。
92.图7为用于对第一实施方式中的第一动作s31进行说明的图。在第一动作s31中,如图7所示,机械臂2使头3a的位置从位置p1起移动至位置p2为止。此时,头3a基于图像数据而向工件w喷出油墨,并且能量出射部3c向工件w出射能量ll。此时,头3a以位于与能量出射部3c相比靠前方处的状态而从位置p1向位置p2进行移动。因此,对于从头3a被施加至工件w上的油墨而照射来自能量出射部3c的能量ll。
93.但是,在第一动作s31的执行过程中,作为对工件w照射能量ll的最大范围的照射范围rl1与作为对工件w给予油墨的最大范围的印刷范围rp并不一致。在此,在第一动作s31的执行之后的工件w上,存在可能残留未被照射能量ll的油墨的区域rn。区域rn为可能残留在第一动作s31的执行过程中的最后从头3a被喷出的油墨的区域。
94.从实现画质的提升的观点出发,优选为,作为第一动作s31的执行过程中的喷出距离la的第一喷出距离la1跨及第一动作s31的执行期间内而为固定。另外,在此,第一喷出距离la1为固定是指,容许被形成于面wf上的凹凸或由机械臂2的动作造成的误差的概念。此外,从同样的观点出发,优选为,作为第一动作s31的执行过程中的角度θa的第一角度θa1跨及第一动作s31的执行期间内而为固定。另外,在此,第一角度θa1为固定是指,容许被形成于面wf上的凹凸或由机械臂2的动作造成的误差的概念。在第一喷出距离la1以及第一角度θa1分别跨及第一动作s31的执行期间内而为固定的情况下,作为第一动作s31的执行过程中的照射距离lb的第一照射距离lb1跨及第一动作s31的执行期间内而为固定。
95.在图7所示的示例中,喷出面fn相对于面wf而平行,且第一角度θa1为0
°
。另外,虽然第一角度θa1也可以大于或小于0
°
,但是从实现画质的提升的观点出发,优选为
±
45
°
以下。
96.在本实施方式的第一动作s31中,通过机械臂2的关节部230_2、230_3、230_5的动作,从而在跨及第一动作s31的执行期间内而将第一喷出距离la1以及第一角度θa1维持在固定的同时,使头3a从位置p1向位置p2进行移动。另外,在第一动作s31中,虽然也可以使机械臂2的关节部230_2、230_3、230_5以外的关节部230进行动作,但是通过关节部230_2、230_3、230_5以外的关节部230不进行动作,从而能够高精度地实施头3a的移动。
97.图8为用于对第一实施方式中的第二动作s32进行说明的图。在第二动作s32中,如图8所示,机械臂2使头3a的位置从位置p2起移动至位置p3为止。此时,在头3a不向工件w喷出油墨的条件下,能量出射部3c向工件w出射能量ll。因此,对于残留在工件w的前文所述的区域rn中的油墨而照射来自能量出射部3c的能量ll。即,在第二动作s32的执行过程中,作为对工件w照射能量ll的最大范围的照射范围rl2包含区域rn。
98.在此,第二动作s32在与第一动作s31相同的印刷路径中后续于第一动作s31而被实施。“印刷路径”是指,不包含任何使头3a的移动路径在宽度方向上发生偏移的换行动作、和将头3a的移动方向切换为相反方向的返回动作,而执行由头3a实施的油墨的喷出和由能量出射部3c实施的能量的出射的一系列动作。
99.作为第二动作s32的执行过程中的照射距离lb的第二照射距离lb2与前文所述的第一照射距离lb1在至少一部分的期间内有所不同。在本实施方式中,第二照射距离lb2在第二动作s32的刚刚开始执行时与第一照射距离lb1相同,但是在第二动作s32的执行过程中与第一照射距离lb1相比而较大。在此,第二照射距离lb2随着头3a从位置p2趋向于位置p3而连续地变大。如此,第二照射距离lb2的变化量与第一照射距离lb1的变化量相比而较大。即,第一照射距离lb1的变化量与第二照射距离lb2的变化量相比而较小。另外,在本实施方式中,在第二动作s32的执行过程中头3a不喷出油墨,但是作为第二动作s32的执行过程中的喷出距离la的第二喷出距离la2伴随着第二照射距离lb2的变化而与前文所述的第一喷出距离la1有所不同。即,第二喷出距离la2随着头3a从位置p2趋向于位置p3而连续地变大。
100.在本实施方式的第二动作s32中,通过机械臂2的关节部230_5的动作而使头3a从位置p2向位置p3移动,以使第二照射距离lb2变大。另外,在第二动作s32中,也可以使机械臂2的关节部230_5以外的关节部230进行动作。
101.在此,关节部230_5为多个关节部230中的、在第二动作s32的执行过程中转动量最大的关节部230。多个关节部230的与关节部230_5相比更靠近基部210的转动部中的、在第一动作s31的执行过程中转动量最大的关节部230为关节部230_3。当将第一动作s31的执行过程中的关节部230_5的转动量设为r11、将第一动作s31的执行过程中的关节部230_3的转动量设为r12、将第二动作s32的执行过程中的关节部230_5的转动量设为r21、并将第二动作s32的执行过程中的关节部230_3的转动量设为r22时,满足r21/r22>r11/r12的关系。如果概括性地进行叙述,则在第一动作s31的执行过程中使关节部230整体地进行转动,相对于此,在第二动作s32的执行过程中主要使靠近臂部220的顶端的关节部230进行转动。因此,即使在通过第一动作s31而使臂部220完全伸出的状态下,也能够利用第二动作s32而向可能残留未被照射能量ll的油墨的区域rn照射能量。此外,能够在高精度地对第一动作s31的执行过程中的头3a的位置以及姿态进行控制的同时,减少第二动作s32的执行过程中的机械臂2的无用的动作。
102.作为第二动作s32的执行过程中的喷出面fn与工件w的和喷出面fn对置的面所成的角度θa的第二角度θa2与前文所述的第一角度θa1有所不同。在本实施方式中,第二角度θa2与第一角度θa1相比而较大。在此,第二角度θa2随着头3a从位置p2趋向于位置p3而连续地变大。如此,第二角度θa2的变化量与第一角度θa1的变化量相比而较大。即,第一角度θa1的变化量与第二角度θa2的变化量相比而较小。
103.另外,“第一角度θa1的变化量”既可以为跨及第一动作s31的执行期间的第一角度θa1的平均变化量,也可以为第一动作s31的执行过程中的第一角度θa1的最大值与最小值的差分。同样地,“第二角度θa2的变化量”既可以为跨及第二动作s32的执行期间的第二角度θa2的平均变化量,也可以为第二动作s32的执行过程中的第二角度θa2的最大值与最小值的差分。
104.在本实施方式中,在第二动作s32中,头3a的姿态以使出射面fl朝向第一动作s31的执行过程中的头3a的移动方向的方式而发生变化。也就是说,虽然在位置p2处为出射面fl朝向z2方向的状态,但是与此相比,在位置p3处出射面fl的朝向方向中所包含的x2方向的成分较多。在此,x2方向为第一动作s31的执行过程中的头3a的移动方向。
105.优选为,第二动作s32的执行过程中的能量出射部3c相对于工件w的相对移动速度为,第一动作s31的执行过程中的能量出射部3c相对于工件w的相对移动速度以下。在这种情况下,即使不提高从能量出射部3c所出射的能量ll的强度,也能够利用第二动作s32来提高向工件w上的油墨所照射的能量ll的密度。另外,也可以使第二动作s32的执行过程中的从能量出射部3c所出射的能量ll的强度与第二动作s32的执行过程中相比而较高。
106.此外,第二动作s32的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离与第一动作s31的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离相比而较小。即,第一动作s31的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离与第二动作s32的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离相比而较大。
107.在此,当头3a从位置p2到达位置p3处时,立体物印刷装置1结束第二动作s32的执行。另外,优选为,在第二动作s32的结束后停止能量ll从能量出射部3c的照射。
108.如前文所述,以上的立体物印刷方法使用立体物印刷装置1而被实施。如前文所述,立体物印刷装置1具备头3a、能量出射部3c和作为“移动机构”的一个示例的机械臂2。头3a具有设置有喷出作为“液体”的一个示例的油墨的喷嘴n的喷出面fn。能量出射部3c具有出射使从头3a被喷出的油墨硬化或固化的能量的出射面fl。机械臂2使头3a以及能量出射部3c相对于立体工件w的相对位置发生变化。
109.立体物印刷装置1执行第一动作s31和第二动作s32。即,使用立体物印刷装置1的立体物印刷方法包括第一动作s31和第二动作s32。
110.第一动作s31同时地执行由头3a实施的油墨向工件w的喷出、由能量出射部3c实施的能量向工件w的出射、和由机械臂2实施的头3a以及能量出射部3c相对于工件w的相对移动。第二动作s32在与第一动作s31相同的印刷路径中后续于第一动作s31而同时地执行由能量出射部3c实施的能量向工件w的出射、和由机械臂2实施的头3a以及能量出射部3c相对于工件w的相对移动,且不执行由头3a实施的油墨向工件w的喷出。
111.此外,第一照射距离lb1与第二照射距离lb2互不相同,所述第一照射距离lb1为第一动作s31的执行过程中的沿着出射面fl的法线方向的工件w与出射面fl之间的距离,所述第二照射距离lb2为第二动作s32的执行过程中的沿着出射面fl的法线方向的工件w与出射面fl之间的距离。
112.在以上的立体物印刷方法或立体物印刷装置1中,通过使第一动作s31同时地执行由头3a实施的油墨向工件w的喷出和由机械臂2实施的头3a以及能量出射部3c相对于工件w的相对移动,从而能够跨及工件w的必要范围而给予油墨。在此,通过使第一动作s31还同时地执行由能量出射部3c实施的能量向工件w的出射,从而能够对于工件w上的油墨而以跨及必要范围的大部分的方式照射能量。
113.此外,第二动作s32在与第一动作s31相同的印刷路径中后续于第一动作s31而被实施。在此,通过使第二动作s32同时地执行由能量出射部3c实施的能量向工件w的出射和
由机械臂2实施的头3a以及能量出射部3c相对于工件w的相对移动,从而即使对于在第一动作s31中被给予至工件w上的油墨中的、在第一动作s31中并未接受到能量的照射的油墨,也能够照射能量。即,在第二动作s32中,即使对于在第一动作s31的执行过程中的最后从头3a被喷出的油墨也能够照射能量。此外,通过使第二动作s32不执行由头3a实施的油墨向工件w的喷出,从而防止未接受能量的照射的油墨在第二动作s32的执行之后残留在工件w上的情况。
114.并且,通过使第一照射距离lb1与第二照射距离lb2互不相同,从而即使在第二动作s32的执行过程中因机械臂2的可动范围或障碍物的存在等而导致机械臂2的动作被限制,也能够向在第一动作s31的执行之后并未接受能量的照射而残留在工件w上的油墨照射能量。如此,能够适当地使工件w上的油墨硬化或固化。
115.此外,如前文所述,第一照射距离lb1的变化量与第二照射距离lb2的变化量相比而较小。因此,能够使第一喷出距离la1的变化量与第二喷出距离la2的变化量相比而较小。其结果为,和第一照射距离lb1的变化量与第二照射距离lb2的变化量相比而较大的结构相比,能够提升画质。另外,如前文所述,第一喷出距离la1为第一动作s31的执行过程中的沿着喷出面fn的法线方向的工件w与喷出面fn之间的距离。第二喷出距离la2为第二动作s32的执行过程中的沿着喷出面fn的法线方向的工件w与喷出面fn之间的距离。
116.在此,如前文所述,优选为,第一动作s31的执行过程中的油墨从喷嘴n喷出的喷出方向上的喷出面fn的至少一部分与工件w之间的距离、即、第一喷出距离la1跨及第一动作s31的执行期间内而为固定。在这种情况下,能够很容易地实现画质的提升。另外,在工件w的表面发生弯曲或屈曲的情况下,有时无法在作为实质上的平面的喷出面fn的整体上将与工件w的距离保持为固定。
117.在本实施方式中,如前文所述,第二照射距离lb2与第一照射距离lb1相比而较大。因此,在第二动作s32的执行过程中障碍物等物体存在于工件w上或与其相比更靠头3a的移动方向上的前方处的情况下,能够在避免头3a等与该物体的碰撞的同时,向在第一动作s31的执行之后并未接受能量的照射而残留在工件w上的油墨照射能量。
118.如前文所述,优选为,第二动作s32的执行过程中的能量出射部3c相对于工件w的相对移动速度为,第一动作s31的执行过程中的能量出射部3c相对于工件w的相对移动速度以下。在这种情况下,即使在第二照射距离lb2与第一照射距离lb1相比而较大的情况下,也能够减小第一动作s31的执行时的能量对于工件w上的油墨的给予量与第二动作s32的执行时的能量对于工件w上的油墨的给予量之差。
119.在本实施方式中,如前文所述,第一角度θa1与第二角度θa2互不相同,所述第一角度θa1为第一动作s31的执行过程中的喷出面fn与工件w的和喷出面fn对置的面所成的角度,所述第二角度θa2为第二动作s32的执行过程中的喷出面fn与工件w的和喷出面fn对置的面所成的角度。因此,和第一角度θa1以及第二角度θa2彼此相等的情况相比,能够使头3a以及能量出射部3c的位置的变化较小,并且使第一照射距离lb1和第二照射距离lb2互不相同。
120.在此,如前文所述,在第一角度θa1的变化量与第二角度θa2的变化量相比而较小的情况下,和第一角度θa1的变化量大于第二角度θa2的变化量的情况相比,容易使第一喷出距离la1的变化量与第二喷出距离la2的变化量相比而较小。因此,和第一角度θa1的变化
量与第二角度θa2的变化量相比而较大的结构相比,具有易于提升画质这样的优点。
121.另外,“第一角度θa1的变化量”既可以为跨及第一动作s31的执行期间的第一角度θa1的平均变化量,也可以为第一动作s31的执行过程中的第一角度θa1的最大值与最小值的差分。同样地,“第二角度θa2的变化量”既可以为跨及第二动作s32的执行期间的第二角度θa2的平均变化量,也可以为第二动作s32的执行过程中的第二角度θa2的最大值与最小值的差分。
122.此外,如前文所述,在第一角度θa1跨及第一动作s31的执行期间内而为固定的情况下,和第一角度θa1在第一动作s31的执行过程中发生变化的结构相比,能够提升画质。
123.在本实施方式中,如前文所述,在第二动作s32中,头3a的姿态以使出射面fl朝向第一动作s31的执行过程中的头3a的移动方向的方式而发生变化。因此,能够在减少第二动作s32中的能量出射部3c的移动量的同时,对第二动作s32中的工件w上的较大范围照射能量。此外,在于印刷路径中使机械臂2的臂部220从弯曲的状态向伸直的状态变化的情况下,即使在臂部220完全伸出的状态下,也能够对第二动作s32中的工件w上的较大范围照射能量。
124.此外,如前文所述,第一动作s31的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离与第二动作s32的执行过程中的头3a或能量出射部3c相对于工件w的相对移动距离相比而较大。因此,能够在减少机械臂2的无用的动作的同时,对工件w的较大范围实施印刷。
125.如前文所述,该立体物印刷方法包括在第一动作s31之前取得示教点信息da的步骤。示教点信息da为与用于进行第一动作s31的第一示教点p1和用于进行第二动作s32的第二示教点p2相关的信息。在此,第二示教点p2的数量与第一示教点p1的数量相比而较少。因此,和第二示教点的数量多于第一示教点的数量的情况相比,与头3a或能量出射部3c的移动路径相关的路径信息db的生成较为简单。
126.此外,如前文所述,机械臂2具有基部210、和被支承在基部210上的臂部220。在臂部220的顶端处支承有头3a以及能量出射部3c。在基部210以及臂部220上,设置有作为“多个转动部”的一个示例的多个关节部230。多个关节部230使头3a以及能量出射部3c的位置以及姿态相对于基部210而发生变化。多个关节部230中的、在第二动作s32的执行过程中转动量最大的关节部230_5为“第一转动部”的一个示例。多个关节部230的与关节部230_5相比更靠近基部210的转动部中的、在第一动作s31的执行过程中转动量最大的关节部230_3为“第二转动部”的一个示例。在此,当将第一动作s31的执行过程中的关节部230_5的转动量设为r11、将第一动作s31的执行过程中的关节部230_3的转动量设为r12、将第二动作s32的执行过程中的关节部230_5的转动量设为r21、并将第二动作s32的执行过程中的关节部230_3的转动量设为r22时,满足r21/r22>r11/r12的关系。因此,即使在通过第一动作s31而使臂部220完全伸出的状态下,也能够利用第二动作s32来对可能残留未被照射能量ll的油墨的区域rn照射能量。此外,能够在高精度地对第一动作s31的执行过程中的头3a的位置以及姿态进行控制的同时,减少第二动作s32的执行过程中的机械臂2的无用的动作。
127.2.第二实施方式
128.以下,对本发明的第二实施方式进行说明。在以下所例示的方式中,对于作用以及功能与第一实施方式同样的要素而沿用在第一实施方式的说明中所使用的符号,并适当地
省略各自的详细说明。
129.图9为用于对第二实施方式中的第二动作进行说明的图。本实施方式除了第二动作有所不同以外,均与前文所述的第一实施方式相同。本实施方式的第二动作除了头单元3的姿态不发生变化以外,均与第一实施方式的第二动作s32相同。即,在本实施方式的第二动作中,以将头3a以及能量出射部3c的姿态保持为固定的状态而就此使头3a的位置从位置p2向位置p3进行变化。通过以上的第二实施方式,也能够适当地使工件w上的油墨硬化或固化。根据本实施方式的第二动作,例如在与工件w相比靠x2方向侧处具有未图示的障碍物的情况下,能够防止该障碍物与头单元3的碰撞。另外,本实施方式的位置p3也可以与第一实施方式的位置p3不同。
130.3.第三实施方式
131.以下,对本发明的第三实施方式进行说明。在以下所例示的方式中,对于作用以及功能与第一实施方式同样的要素而沿用在第一实施方式的说明中所使用的符号,并适当地省略各自的详细说明。
132.图10为用于对第三实施方式中的第二动作进行说明的图。本实施方式除了第二动作有所不同以外,均与前文所述的第一实施方式相同。本实施方式的第二动作除了头单元3的姿态向与第一实施方式相反的一侧发生变化以外,均与第一实施方式的第二动作s32相同。在本实施方式中,第二动作s32中的头3a的姿态以使出射面fl朝向第一动作s31的执行过程中的头3a的移动方向的相反方向的方式而发生变化。也就是说,虽然在位置p2处为出射面fl朝向z2方向的状态,但是与此相比,在位置p3处出射面fl所朝向的方向中所包含的x1方向的成分较多。在此,x1方向为第一动作s31的执行过程中的头3a的移动方向的相反方向。
133.通过以上的第三实施方式,也能够适当地使工件w上的油墨硬化或固化。在本实施方式中,在第二动作中,头3a的姿态以使出射面fl朝向第一动作的执行过程中的头3a的移动方向的相反方向的方式而发生变化。因此,能够在减少第二动作下的能量出射部3c的移动量的同时,对第二动作下的工件w上的较大范围照射能量ll。此外,能够减少向工件上的不存在油墨的区域的无用的能量的照射。另外,本实施方式的位置p3也可以与第一实施方式的位置p3不同。
134.4.第四实施方式
135.以下,对本发明的第四实施方式进行说明。在以下所例示的方式中,对于作用以及功能与第一实施方式同样的要素而沿用在第一实施方式的说明中所使用的符号,并适当地省略各自的详细说明。
136.图11为用于对第四实施方式中的第二动作进行说明的图。本实施方式除了第二动作有所不同以外,均与前文所述的第一实施方式相同。本实施方式的第二动作除了头单元3的姿态不发生变化、且第二照射距离lb2与第一照射距离lb1相比而较小以外,均与第一实施方式的第二动作s32相同。在图11所示的示例中,沿着z轴的方向上的位置p3位于与沿着z轴的方向上的位置p2相比而靠z2方向处。而且,在本实施方式的第二动作中,以将头3a以及能量出射部3c的姿态保持为固定的状态而就此使头3a的位置从位置p2向位置p3进行变化。
137.通过以上的第二实施方式,也能够适当地使工件w上的油墨硬化或固化。在本实施方式中,如前文所述,第二照射距离lb2与第一照射距离lb1相比而较小。因此,即使不提高
从能量出射部3c所出射的能量ll的强度,也能够利用第二动作来提高向工件w上的油墨所照射的能量ll的密度。其结果为,即使不减慢第二动作下的能量出射部3c的移动速度,也能够使第二动作下的工件w上的油墨充分地硬化或固化。另外,本实施方式的从位置p2起至位置p3为止的距离也可以与第一实施方式的从位置p2起至位置p3为止的距离不同。
138.5.变形例
139.以上的例示中的各方式可以进行多种多样的变形。在下文中,对可应用于前文所述的各方式中的具体的变形方式进行例示。另外,从以下的示例中被任意地选出的两种以上的方式可以在相互不矛盾的范围内适当地进行合并。
140.5-1.变形例1
141.虽然在前文所述的方式中作为移动机构而对使用六轴的垂直多轴机械臂的结构进行了例示,但是并不限定于该结构。移动机构例如既可以为六轴以外的垂直多轴机械臂,也可以为水平多轴机械臂。此外,机械臂的臂部也可以除具有由转动机构所构成的转动部之外还具有伸缩机构或直联机构等。但是,从印刷动作下的印刷品质与非印刷动作下的机械臂的动作的自由度之间的平衡的观点出发,优选为,机械臂为六轴以上的多轴机械臂。
142.5-2.变形例2
143.虽然在前文所述的方式中对使用螺丝紧固等以作为头相对于机械臂的固定方法的结构进行了例示,但是并不限定于该结构。例如,也可以通过利用作为机械臂的末端执行器而被安装的抓手等抓持机构来对头进行抓持,从而相对于机械臂来对头进行固定。
144.5-3.变形例3
145.虽然在前文所述的方式中对使用一种油墨来实施印刷的结构进行了例示,但是并不限定于该结构,也能够将本公开应用于使用两种以上的油墨来实施印刷的结构中。
146.5-4.变形例4
147.本公开的立体物印刷装置以及立体物印刷方法的用途并不限定于印刷。例如,喷出颜色材料的溶液的立体物印刷装置可作为形成液晶显示装置的滤色器的制造装置而被利用。此外,喷出导电材料的溶液的立体物印刷装置可作为形成配线基板的配线或电极的制造装置而被利用。此外,立体物印刷装置也能够作为将粘合剂等液体涂敷到介质上的喷射分配器来进行利用。
148.符号说明
[0149]1…
立体物印刷装置;2
…
机械臂(移动机构);2a
…
臂驱动机构;3
…
头单元;3a
…
头;3b
…
压力调节阀;3c
…
能量出射部;3e
…
开关电路;3f
…
支承体;5
…
控制器;5a
…
存储电路;5b
…
处理电路;6
…
控制模块;6a
…
定时信号生成电路;6b
…
电源电路;6c
…
控制电路;6d
…
驱动信号生成电路;7
…
计算机;10
…
配管部;10a
…
供给管;11
…
配线部;11a
…
驱动配线;210
…
基部;220
…
臂部;221
…
臂;222
…
臂;223
…
臂;224
…
臂;225
…
臂;226
…
臂;230
…
关节部(转动部);230_1
…
关节部(转动部);230_2
…
关节部(转动部);230_3
…
关节部(转动部、第二转动部);230_4
…
关节部(转动部);230_5
…
关节部(转动部、第一转动部);230_6
…
关节部(转动部);clk
…
时钟信号;cng
…
交换信号;com
…
驱动信号;d1
…
输出;d3
…
信号;dn
…
排列方向;da
…
示教点信息;db
…
路径信息;fl
…
出射面;fn
…
喷出面;fv
…
假想平面;l1
…
喷嘴列;l2
…
喷嘴列;lat
…
锁存信号;ll
…
能量;la
…
喷出距离;la1
…
第一喷出距离;la2
…
第二喷出距离;lb
…
照射距离;lb1
…
第一照射距离;lb2
…
第二照射距离;n
…
喷嘴;
o1
…
转动轴;o2
…
转动轴;o3
…
转动轴;o4
…
转动轴;o5
…
转动轴;o6
…
转动轴;p1
…
第一示教点;p2
…
第二示教点;pd
…
驱动脉冲;pt1
…
第一示教点;pt1_1
…
第一示教点;pt1_2
…
第一示教点;pt1_3
…
第一示教点;pt2
…
第二示教点;pts
…
定时信号;pa1
…
中心;pa2
…
交点;pb1
…
中心;pb2
…
交点;rl1
…
照射范围;rl2
…
照射范围;rn
…
区域;rp
…
印刷范围;ru
…
移动路径;s10
…
步骤;s20
…
步骤;s30
…
步骤;s31
…
第一动作;s32
…
第二动作;si
…
控制信号;sk1
…
控制信号;vbs
…
偏移电位;vhv
…
电源电位;w
…
工件;wf
…
面;dcom
…
波形指定信号;db
…
路径信息;θa
…
角度;θa1
…
第一角度;θa2
…
第二角度;θb
…
角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1