一种全自动植胶机的控制方法与流程
1.本发明涉及植胶机领域,尤其是涉及一种全自动植胶机的控制方法。
背景技术:
2.植胶机(上胶机、丝印机)是植胶文字、图像和商标的机器。现代植胶机一般由制版、植胶和压印等机构组成。它的工作原理是:先将要植胶的文字和图像制成凹凸模版,然后由人工或植胶机将胶水植入凹凸模版带有文字和图像的地方,再直接或间接地转印到纺织品或其他承印物(如纺织品、金属板、塑胶、皮革、木板、玻璃和陶瓷)上,从而复制出与凸凹模版相同的植胶品。植胶机的发明和发展,对于人类文明和文化的传播具有重要作用,然而现有技术中植胶设备在进行使用时,容易出现待植胶品在运输过程中容易发生推积拥挤,从而影响到植胶品的植胶,为此提出一种全自动植胶机。
技术实现要素:
3.本发明为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。
4.一种全自动植胶机的控制方法,包括以下步骤:
5.s1、进料:将待植胶的模板及产品放置于进料台上,电子感应到模板及产品时,进料台通过推手,且进料台依次将待植胶及印刷的产品进行推近至工作台侧边;
6.s2、递料:将推近至工作台侧边的待植胶及印刷的产品吸附式推至工作台上的运料台,并等待植胶;
7.s3、传递:运料台于工作台上进行移动,并移动至刮刷机械手底端;
8.s4、植胶:刮刷机械手向下驱降与运料台上的物品进行接触,且刮刷机械手多方位移动,进而进行植胶及印刷;
9.s5、去边料:植胶完成的物品运输至刮料机械手底端并通过刮料机械手对植胶完成的物品表面残留的边料进行刮除;
10.s6、再传递:将边料处理完成的物品传递至出料台侧边并吸附式推至出料台上;
11.s7、出料:吸附式推至出料台上的物品通过出料台运输至外部,进而完成该物品的植胶及印刷工作。
12.优选地,所述进料台上的物品通过吸盘吸附至工作台上,且吸盘于工作台表面上进行移动。
13.优选地,所述刮刷机械手通过定位压板对运料台上的物品进行定位压固,且定位压板与工作台之间相互平行。
14.优选地,所述刮料机械手侧边设置有收集架,且收集架用于收集刮料机械手刮下的边料,并且收集架于工作台表面进行上下移动。
15.一种全自动植胶机,用于实施所述一种全自动植胶机的控制方法,包括工作架,所述工作架内部底端竖直设置有支撑架,且支撑架表面横向设置有工作台,所述工作台表面横向设置有导轨,且导轨表面移动设置有运料台,并且运料台于导轨上进行绕圈运动,所述
工作台表面的左右两侧分别活动设置有第一驱动齿轮和第二驱动齿轮,且第一驱动齿轮和第二驱动齿轮分别于导轨内部的左右两侧进行转动,所述第一驱动齿轮与第二驱动齿轮之间相互对齐,且第一驱动齿轮与第二驱动齿轮之间缠绕设置有齿链,并且齿链分别与第一驱动齿轮和第二驱动齿轮之间进行啮合,进而通过使得第二驱动齿轮进行转动时通过齿链带动第一驱动齿轮进行转动;所述运料台的侧边横向设置有连接块,且连接块与齿链之间进行配合。
16.优选地,所述支撑架内部顶端的右侧处设置有第二驱动电机,且第二驱动电机与第二驱动齿轮进行配合,并且通过第二驱动电机驱动第二驱动齿轮进行转动。
17.优选地,所述工作架的侧边分别设置有出料台和进料台,且出料台和进料台呈同一水平面并与工作台之间呈同一水平面。
18.优选地,所述工作架内部顶端横向设置有横梁,且横梁上移动设置有移动吸盘和移动台,并且通过移动吸盘将进料台上待植胶的物品吸附至工作台上,所述移动台顶端设置有第一驱动电机,且移动台底端活动设置有清洁转盘,所述第一驱动电机与清洁转盘之间进行连接,且第一驱动电机驱动清洁转盘进行转动,并且通过第一驱动电机与清洁转盘之间的配合。
19.优选地,所述工作架背部顶端的左侧处驱动设置有刮刷机械手,且刮刷机械手底端设置有定位压板,并且定位压板与工作台之间进行平行,通过定位压板对运料台上待植胶的物品进行压固定位,且定位压固后通过刮刷机械手对运料台上的物品进行左右刮刷。
20.优选地,所述工作台背部侧边设置有刮料机械手,且刮料机械手与工作台之间相互平行,并且刮料机械手与运料台之间相互平行。
21.与现有技术相比,本发明的有益效果是:连接块与齿链之间进行配合,进而使得齿连进行转动时带动,使得运料台于导轨上进行匀速运输,从而保证了待植胶品在运输过程中不会发生堆积拥挤,进而解决了现有技术中植胶设备在进行使用时,容易出现待植胶品在运输过程中容易发生推积拥挤,从而影响到植胶品的植胶。
22.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
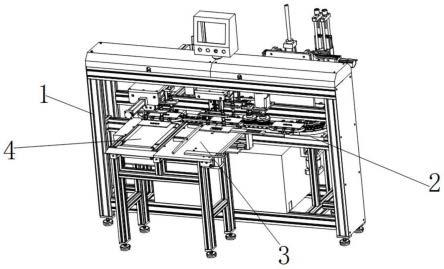
24.图1为一种全自动植胶机的结构示意图;
25.图2为一种全自动植胶机的另一结构示意图;
26.图3为工作架的结构示意图;
27.图4为工作台的结构示意图;
28.图5为工作台的另一结构示意图;
29.图6为图5中a处的放大图;
30.图7为工作台的又一结构示意图。
31.图中所示:1、工作架,2、工作台,3、进料台,4、出料台,5、刮刷机械手,6、定位压板,7、刮料机械手,8、支撑架,9、横梁,10、移动吸盘,11、第一驱动电机,12、移动台,13、清洁转盘,14、第二驱动电机,15、导轨,16、第一驱动齿轮,17、运料台,18、齿链,19、第二驱动齿轮,20、连接块。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.一种全自动植胶机的控制方法,包括以下步骤:
34.s1、进料:将待植胶的模板及产品放置于进料台上,电子感应到模板及产品时,进料台通过推手,且进料台依次将待植胶及印刷的产品进行推近至工作台侧边;
35.s2、递料:将推近至工作台侧边的待植胶及印刷的产品吸附式推至工作台上的运料台,并等待植胶;
36.s3、传递:运料台于工作台上进行移动,并移动至刮刷机械手底端;
37.s4、植胶:刮刷机械手向下驱降与运料台上的物品进行接触,且刮刷机械手多方位移动,进而进行植胶及印刷;
38.s5、去边料:植胶完成的物品运输至刮料机械手底端并通过刮料机械手对植胶完成的物品表面残留的边料进行刮除;
39.s6、再传递:将边料处理完成的物品传递至出料台侧边并吸附式推至出料台上;
40.s7、出料:吸附式推至出料台上的物品通过出料台运输至外部,进而完成该物品的植胶及印刷工作。
41.所述进料台上的物品通过吸盘吸附至工作台上,且吸盘于工作台表面上进行移动。
42.所述刮刷机械手通过定位压板对运料台上的物品进行定位压固,且定位压板与工作台之间相互平行。
43.所述刮料机械手侧边设置有收集架,且收集架用于收集刮料机械手刮下的边料,并且收集架于工作台表面进行上下移动。
44.一种全自动植胶机,用于实施所述一种全自动植胶机的控制方法,包括工作架1,所述工作架1内部底端竖直设置有支撑架8,且支撑架8表面横向设置有工作台2,所述工作台2表面横向设置有导轨15,且导轨15表面移动设置有运料台17,并且运料台17于导轨15上进行绕圈运动,所述工作台2表面的左右两侧分别活动设置有第一驱动齿轮16和第二驱动齿轮19,且第一驱动齿轮16和第二驱动齿轮19分别于导轨15内部的左右两侧进行转动,所述第一驱动齿轮16与第二驱动齿轮19之间相互对齐,且第一驱动齿轮16与第二驱动齿轮17之间缠绕设置有齿链18,并且齿链18分别与第一驱动齿轮16和第二驱动齿轮17之间进行啮合,进而通过使得第二驱动齿轮17进行转动时通过齿链18带动第一驱动齿轮16进行转动;所述运料台17的侧边横向设置有连接块20,且连接块20与齿链18之间进行配合,进而使得齿连18进行转动时带动,使得运料台17于导轨15上进行匀速运输,从而保证了待植胶品在
运输过程中不会发生堆积拥挤,进而解决了现有技术中植胶设备在进行使用时,容易出现待植胶品在运输过程中容易发生推积拥挤,从而影响到植胶品的植胶。
45.所述支撑架8内部顶端的右侧处设置有第二驱动电机14,且第二驱动电机14与第二驱动齿轮19进行配合,并且通过第二驱动电机14驱动第二驱动齿轮19进行转动,进而带动运料台17进行运料。
46.所述工作架1的侧边分别设置有出料台3和进料台4,且出料台3和进料台4呈同一水平面并与工作台2之间呈同一水平面,进而通过进料台4对待植胶的物品运输至工作台以及通过出料台3对植胶完毕的物品运输至外部。
47.所述工作架1内部顶端横向设置有横梁9,且横梁9上移动设置有移动吸盘10和移动台12,并且通过移动吸盘10将进料台4上待植胶的物品吸附至工作台2上,所述移动台12顶端设置有第一驱动电机11,且移动台12底端活动设置有清洁转盘13,所述第一驱动电机11与清洁转盘13之间进行连接,且第一驱动电机11驱动清洁转盘13进行转动,并且通过第一驱动电机11与清洁转盘13之间的配合,从而将运输至工作台2上待植胶的物品进行表面清洁。
48.所述工作架1背部顶端的左侧处驱动设置有刮刷机械手5,且刮刷机械手5底端设置有定位压板6,并且定位压板6与工作台2之间进行平行,通过定位压板6对运料台17上待植胶的物品进行压固定位,且定位压固后通过刮刷机械手5对运料台17上的物品进行左右刮刷。
49.所述工作台2背部侧边设置有刮料机械手7,且刮料机械手7与工作台2之间相互平行,并且刮料机械手7与运料台17之间相互平行,进而通过刮料机械手7对运料台17上植胶完成的物品进行物料残留刮除。
50.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1