一种拨号键四轴机器人柔性印刷设备的制作方法
1.本实用新型涉及柔性印刷设备技术领域,特别是一种拨号键四轴机器人柔性印刷设备。
背景技术:
2.目前,常规的生产方式为作业员从注塑机流水线上取出产品,然后再人工放入印刷机,再手动启动,印刷完成后再人工取出来,效率低下,还容易出错,划伤产品表面,产能低下,多个工位增加生产人力,增加生产成本,为了降低不同产品开发不同的设备,需要开发一通用性的设备满足产品自动化生产。
3.为此我们研发了一种拨号键四轴机器人柔性印刷设备,用以解决以上问题。
技术实现要素:
4.本实用新型目的是为了克服现有技术的不足而提供一种拨号键四轴机器人柔性印刷设备,具有提高工作效率,降低外观不良,提高良率,快速换型,提高通用性,提高经济效益等优点。
5.为达到上述目的,本实用新型采用的技术方案是:一种拨号键四轴机器人柔性印刷设备,包括一四轴机械手、一送料流水线、一印刷机与一ccd定位系统,所述四轴机械手的一端通过连接轴固定连接一柔性吸料夹具,所述柔性吸料夹具的底端通过连接板连接有多个吸盘,并且下侧设有所述送料流水线,所述送料流水线的一侧设有所述四轴机械手,并且另一侧设有所述印刷机,所述ccd定位系统通过支架架设在所述送料流水线的顶端,所述送料流水线靠近所述四轴机械手的一侧设有一控制器;
6.所述送料流水线的顶端处设有一电机驱动的皮带,所述皮带的一侧设有一挡罩,并且另一侧设有至少一导向轮,所述导向轮的一侧架设有一光电传感器,所述皮带的顶端放置有拨号键;
7.所述ccd定位系统包括一ccd相机,所述ccd相机底端处设有一镜头,所述镜头的下侧架设有一光源,所述控制器分别与所述四轴机械手、所述光电传感器、所述印刷机、所述ccd定位系统电性连接。
8.优选的,所述柔性吸料夹具包括一夹具本体与一连接接头,所述夹具本体的一端处设有圆周均布的第一连接孔,所述连接接头的底端处设有圆周均布的第二连接孔,所述第一连接孔与所述第二连接孔固定连接。
9.优选的,所述夹具本体的另一端处设有一中空的沉槽,所述沉槽长度方向的两端处分别设有一沉孔,所述沉孔的两侧各设有一第三连接孔。
10.优选的,所述连接接头的中心位置处设有一第四连接孔,所述第四连接孔位于所述夹具本体的长度方向上设有一竖向第一缺口,所述连接接头的外壁设有一水平的第二缺口,所述第一缺口与所述第二缺口垂直设置。
11.优选的,所述第一缺口设有多个贯穿孔,所述连接轴与所述第四连接孔插接,所述
贯穿孔固定连接有螺钉。
12.优选的,所述夹具本体的中间位置处设有多排条形孔,所述条形孔固定有气管。
13.优选的,所述连接板的两端处设有第五连接孔,并且中心位置处设有一通孔,所述第五连接孔与所述沉孔、第三连接孔固定连接。
14.优选的,所述通孔的四周设有多个第六连接孔,所述第六连接孔通过气接头连接有气管,所述气管的底端处设有所述吸盘。
15.优选的,所述控制器设有一蜂鸣器。
16.优选的,所述印刷机设有一拨号键工装,所述拨号键工装的顶端处设有一置物槽。
17.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
18.1.通过四轴机械手来吸取运送注塑件,减少了送料时间和工作强度,提高了工作效率。
19.2.通过吸盘的真空压力吸取,达到吸住或放开注塑件,减少在传送过程中对注塑件表面的伤害,避免了粘片、划伤现象,保证了打印后注塑件字体的清晰度,减少了人工放料打印的误差。
20.3.通过柔性吸料夹具,可以快速更换连接板换型,适应不同的注塑件种类,提高了设备的利用率和经济效益。
附图说明
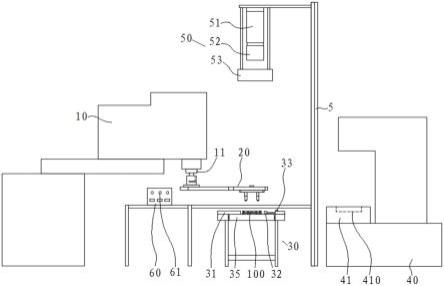
21.附图1为本实用新型所述拨号键四轴机器人柔性印刷设备的结构示意图。
22.附图2为本实用新型所述柔性吸料夹具的俯视图。
23.附图3为本实用新型所述柔性吸料夹具的主视图。
具体实施方式
24.下面结合附图及具体实施例对本实用新型作进一步的详细说明。
25.附图1至附图3中,一种拨号键四轴机器人柔性印刷设备,包括一四轴机械手10、一送料流水线30、一印刷机40与一ccd定位系统50。印刷机40和四轴机械手10设置在隔离网内。送料流水线30靠近四轴机械手10的一侧设有一控制器60。控制器60设有一蜂鸣器61,拨号键100异常时,蜂鸣器61报警。
26.全自动化生产线,适应性强,无需人工干预,送料流水线30上过来的注塑机打出来的成品,到流水线顶端自动停止,流水线上端的视觉检测用的ccd相机51自动拍照,并检查ok与ng,然后将xyr的三个方向的偏差值给四轴机械手10,机械手按照坐标取走成品,然后放到印刷机40上面,印刷机自动印刷,然后机械手再取走印刷好的成品并放到uv流水线的皮带35上面。
27.四轴机械手10的一端通过连接轴11固定连接一柔性吸料夹具20,柔性吸料夹具20包括一夹具本体22与一连接接头21,连接轴11与连接接头21固定连接,柔性吸料夹具20的底端通过连接板23连接有多个吸盘241,并且下侧设有送料流水线30。
28.夹具本体22的一端处设有圆周均布的第一连接孔226,夹具本体22的另一端处设有一中空的沉槽222,夹具本体22的中间位置处设有多排条形孔221。连接接头21的底端处设有圆周均布的第二连接孔210,第一连接孔226与第二连接孔210固定连接。沉槽222长度
方向的两端处分别设有一沉孔224,沉孔224的两侧各设有一第三连接孔223,条形孔221固定有气管。
29.连接接头21的中心位置处设有一第四连接孔216,第四连接孔216位于夹具本体22的长度方向上设有一竖向第一缺口215,第一缺口215设有多个贯穿孔213,连接接头21的外壁设有一水平的第二缺口211,第一缺口215与第二缺口211垂直设置,连接轴11与第四连接孔216插接,贯穿孔213固定连接有螺钉213,螺钉213将第一缺口215锁紧。第一缺口215便于连接轴11的锁紧。第二缺口211提高夹具本体22的柔性。
30.针对公司不同的印刷产品,连接板23可以更换,第六连接孔231根据实际产品结构打孔,连接板23的两端处设有第五连接孔232,并且中心位置处设有一通孔230,通孔230的四周设有多个第六连接孔231,第五连接孔232与沉孔224、第三连接孔223固定连接。第六连接孔231通过气接头240连接有气管24,气管24的底端处设有吸盘241。
31.送料流水线30的一侧设有四轴机械手10,并且另一侧设有印刷机40,送料流水线30的顶端处设有一电机驱动的皮带35,皮带35的一侧设有一挡罩31,并且另一侧设有至少一导向轮32,导向轮32的一侧架设有一光电传感器33,皮带35的顶端放置有拨号键100。挡罩31和导向轮32对注塑的拨号键100进行两端限位。拨号键100在皮带35上输送到光电传感器33前,皮带35在电机控制下停止输送。
32.印刷机40设有一拨号键工装41,拨号键工装41的顶端处设有一置物槽410,四轴机械手10将拨号键100吸取至置物槽410。
33.ccd定位系统50通过支架5架设在送料流水线30的顶端,ccd定位系统50包括一ccd相机51,ccd相机51底端处设有一镜头52,镜头52的下侧架设有一光源53,控制器60分别与四轴机械手10、光电传感器33、印刷机40、ccd定位系统50电性连接。支架5下侧的网格设有一开口,开口内放置送料流水线30,送料流水线30将注塑机注塑的产品进行自动输送。
34.工作时,系统启动,送料流水线30上的注塑件碰到光电传感器33,停止运行,发出到位信号给ccd相机51,ccd定位系统对位置进行确认,如果异常,蜂鸣器61报警提示,如果检查ok,将xy方向和旋转角度的信号发给四轴机械手10,四轴机械手10自动在流水线上通过柔性吸料夹具20上的吸盘来吸取注塑的拨号键100,同时真空检查有没有吸好,随时检测。
35.四轴机械手10吸取好注塑件,然后通过控制器控制印刷机40,印刷机40允许四轴机械手10放料,放料完成后,四轴机械手10退出到安全位置,印刷机40开始工作,工作完成后通过控制器发出取料信号给机器人,四轴机械手10进来吸取印刷好的注塑件,同时检查真空,然后四轴机械手10把印刷好的注塑件放到uv送料流水线30上,完成工作流程,继续下一个循环。
36.以上仅是本实用新型的具体应用范例,对本实用新型的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本实用新型权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1