一种自动驾驶车辆感知端传感器教学台架的制作方法
1.本发明属于自动驾驶领域,设计发明了一种自动驾驶车辆感知端传感器教学台架。
背景技术:
2.随着计算机与通信技术的高速发展与广泛应用,在道路交通领域中自动驾驶技术得以孕育出来。随着技术的发展与应用,自动驾驶出租车、自动驾驶巴士、自动驾驶卡车等一系列智能车辆成功研制并开启量产之路。在出租车、客运传统汽车运营行业中,人工成本占据运营成本的很大一部分,而自动驾驶技术的发展与成熟可逐渐取代人工,降低运行成本、提高运营安全。
3.一般而言,自动驾驶系统架构由三个模块组成:感知模块、决策模块、执行模块。其中感知模块是车辆获取实时外界信息的核心手段,是自动驾驶系统架构中的最重要的一环。一般自动驾驶车辆感知模块中的传感器包括:激光雷达、摄像头、毫米波雷达、超声波雷达、组合导航系统等。这些传感器不断对车辆外界信息进行读取和处理,并输送至决策模块进行进一步处理和决策。通过多传感器对实时环境进行采集和互相验证,最终才能保证自动车辆在行驶中的安全性和可靠性。作为自动驾驶中最开始的一环,感知模块的重要性无与伦比,因此,在面向学校的自动驾驶知识的教学中应该引起重视,采用十分直观的方式对感知模块中各传感器的工作原理进行讲解。
技术实现要素:
4.针对于以上教学需求,本发明设计了一种自动驾驶车辆感知端传感器教学台架,直接对各个传感器通信方式、所采集数据类型、原始数据内容、环境数据采集效果等,进行最直观的展示与教学。
5.一种自动驾驶车辆感知端传感器教学台架,包括台架底座,所述台架底座由传感器集成台和位于传感器集成台两侧的底座支架连接而成,所述底座支架顶部分别安装有滑动导轨,所述滑动导轨上分别滑动设置有标定板,所述传感器集成台前端面设置有面板,所述面板上安装有智能摄像头、超声波雷达、超声波雷达控制器、毫米波雷达、惯导控制器;所述传感器集成台顶部安装有惯导从天线、16线360
°
激光雷达、惯导主天线。
6.作为优选,所述标定板相对于传感器集成台一侧表面分别印刷有亚光黑白标定格,所述标定板与所述面板上的毫米波雷达水平相对应,所述标定板与所述面板上的智能摄像头和超声波雷达水平相对应;作为优选,所述传感器集成台为柜体结构,内部设有电气安装支架,电气安装支架上集成有can卡、供电模块、通讯线束和接口,所述供电模块包括dc
‑
dc转换器扩展插板与交流转直流电源,所述交流转直流电源对的输出端与dc
‑
dc转换器扩展插板输入端电连接;作为优选,所述传感器集成台两侧的底座支架平行设置;作为优选,所述滑动导轨通过螺丝平行并水平固定在底座支架顶部面,所述滑动
导轨上滑动连接有滑块,所述滑块分别与标定板垂直固定连接;作为优选,所述滑动导轨与底座支架长度相同;作为优选,台架底座下面安装有6个可锁死滚轮,便于教学台架的移动;作为优选,所述面板上中部还设置有led显示屏;所述惯导从天线与电气安装支架上串口线接口连接,所述超声波雷达通讯线与毫米波雷达通讯线分别接入can卡中can0、can1接口,can卡另一头接口与电气安装支架上第一usb接口连接,16线激光雷达与电气安装支架上网口转换线接口连接,智能摄像头通过av视频线与电气安装支架上第二usb接口连接,所述led显示屏与电气安装支架上视频接口连接。
7.与现有技术相比,本发明的有益效果是:本发明根据自动驾驶相关基础人才面临短缺的市场需求,设计了一种面向本、专科、高职院校的自动驾驶感知端传感器教学台架。本发明通过对当前主流感知传感器进行软硬件集成开发,依据实际传感器型号与工作原理设计了台架底座、滑动导轨标定板、面板。可在面板上直观展示各传感器通讯线路走向,可通过移动标定板距离观察传感器工作效果。教学台架以台架为核心,实现了与各传感器硬件通讯网络,并通过所集成的上位机软件,实现对各传感器上位机软件的统一管理,可实时展示各传感器的工作效果与实际数据等参数。所发明的教学台架,可通过实际操作可完成学习者对自动驾驶感知端传感器工作效果、通讯方式、所起作用等基础知识的学习,具备深刻的教学作用。
附图说明
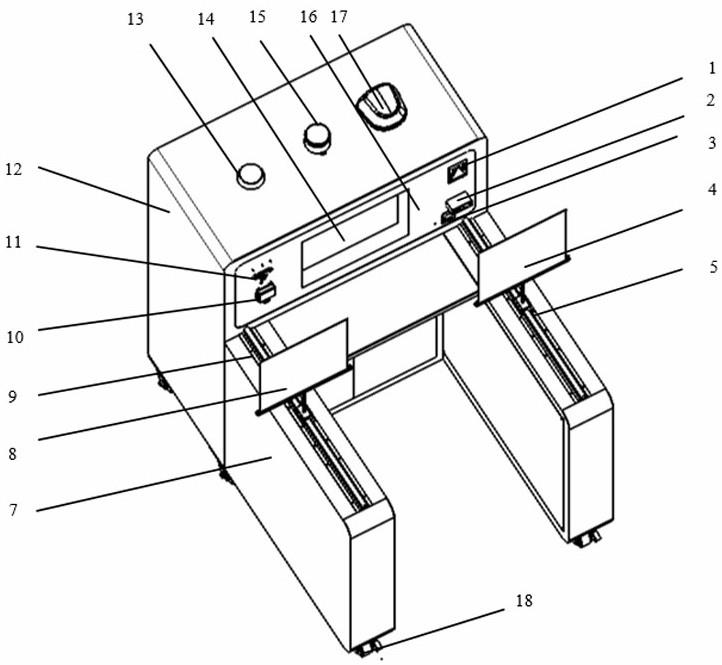
8.图1为本发明自动驾驶感知端传感器教学台架结构图;图2为本发明自动驾驶感知端传感器教学台架通讯网络架构;图3为本发明自动驾驶感知端传感器面板设计图案;图4为本发明自动驾驶感知端传感器教学台架侧视图。
具体实施方式
9.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
10.一种自动驾驶车辆感知端传感器教学台架,包括台架底座7,所述台架底座7由传感器集成台12和位于传感器集成台12两侧的底座支架6连接而成,所述底座支架6顶部分别安装有滑动导轨(5、9),所述滑动导轨(5、9)上分别滑动设置有标定板(4、8),所述传感器集成台12前端面设置有面板16,所述面板16上安装有智能摄像头1、超声波雷达2、超声波雷达控制器3、毫米波雷达10、惯导控制器11;所述传感器集成台12顶部安装有惯导从天线13、16线360
°
激光雷达15、惯导主天线17。
11.所述传感器集成台12两侧的底座支架6平行设置;所述滑动导轨(5、9)通过螺丝平行并水平固定在底座支架6顶部面,所述滑动导轨(5、9)上滑动连接有滑块,所述滑块分别与标定板(4、8)垂直固定连接,所述滑动导轨5、9与底座支架6长度相同。
12.所述传感器集成台12为柜体结构,内部设有电气安装支架,电气安装支架上集成有can卡、供电模块、通讯线束和接口,所述供电模块包括dc
‑
dc转换器扩展插板与交流转直流电源,所述交流转直流电源对的输出端与dc
‑
dc转换器扩展插板输入端电连接,台架底座7下面安装有6个可锁死滚轮18,便于教学台架的移动。
13.所述面板16上中部还设置有led显示屏14。
14.所述惯导从天线13与电气安装支架上串口线接口连接,所述超声波雷达2通讯线与毫米波雷达10通讯线分别接入can卡中can0、can1接口,can卡另一头接口与电气安装支架上第一usb接口连接,16线激光雷达15与电气安装支架上网口转换线接口连接,智能摄像头1通过av视频线与电气安装支架上第二usb接口连接,所述led显示屏14与电气安装支架上视频接口连接。
15.所述标定板4和标定板8都采用亚克力板设计,相对于传感器集成台一侧表面分别印刷有亚光黑白标定格,所述标定板4与所述面板16上的毫米波雷达10水平相对应,所述标定板8与所述面板16上的智能摄像头1和超声波雷达2水平相对应,标定板4用于演示毫米波雷达工作效果,标定板8用于演示超声波和智能摄像头的工作效果。通过导轨移动标定板距传感器的距离,实现传感器所接受外界信号的变化,演示传感器工作效果。
16.感知端传感器模块包括:4g模块、毫米波雷达10、超声波雷达2、360
°
激光雷达15、惯导从天线13,完全根据自动驾驶车辆实际感知模块确定,包含了当前所有主流自动驾驶感知传感器,能够进行完善的自动驾驶相关传感器的教学工作。各传感器根据实际定位孔,直接或通过支架固定于台架底座后端12、面板16上。
17.面板16采用钢板设计,根据实际需求进行板材切割和打孔,所加工出的空间主要具备以下三种用途:(1)固定孔,用于直接固定传感器本身或传感器支撑架;(2)穿透孔,用于实现传感器供电、通讯线束的穿梭;(3)扩展孔,用于实现传感器扩展通讯接口的延伸,与供电线束保险丝的展示,并实现led显示屏的外延。
18.同时,面板16上贴有自设计海报,对各传感器名称、扩展通讯接口名称、通讯线路走向、教学台架名称进行直观展示。
19.台架及相关通讯设备,主要通过安装各感知传感器对应的上位机软件与其他数据接收工具,用于接收、处理、展示、保存相关感知数据,可直观的向学生展示感知传感器实际运行效果、所采集数据内容、原始通讯数据等参数,实现教学目的。台架与各传感器主要通讯方式包括:使用串口线,分别连接惯导从天线13的rs232串口与台架usb口实现串口通讯;使用can卡,将超声波雷达2通讯线与毫米波雷达10通讯线接入can卡中can0、can1口,在将另一头接入台架usb口,实现can通讯;直接将16线激光雷达15通过网口转换线接入台架网口,实现以太网通讯;智能摄像头1通过av视频线转usb,连接至台架实现通讯。以上,实现台架对各感知传感器的硬件通讯网络的搭建。
20.供电模块包括扩展插板与一台交流转直流电源,实现对台架内各传感器与台架的供电需求。
21.教学台架软件架构包括:上位机管理软件、16线激光雷达上位机软件、惯导定位上位机软件、毫米波雷达上位机软件、超声波雷达上位机软件、智能摄像头上位机软件、can工
具上位机软件。
22.上位机管理软件具备调用第三方上位机软件功能,可根据用户在软件中实际点击的按钮信号,启动对应传感器上位机软件,同时,点击对应菜单可启动can工具上位机,方便学生读取、保存传感器实际can数据。
23.360
°
激光雷达15上位机软件,通过输入ip地址、端口号,使台架通过网口连接至激光雷达15。连接成功后,可屏幕中显示激光雷达15实时采集教学台架周围环境的点云数据,并可进行进一步控制。
24.惯导从天线13上位机软件,通过选定并打开对应端口号,实时接收惯导从天线13传感器所采集数据,包括经纬度、航向角、加速度等导航信息,并可进行实时数据保存与回放。
25.毫米波雷达10上位机软件,启动后可将毫米波雷达10实时传输的can报文进行可视化解析,根据毫米波雷达10实际采集外界环境,进行数据滚动变化与可视化界面效果展示。
26.超声波雷达2上位机软件,通过选定并启动can通讯设备与应用can口,实现can报文的实时读取与解析,根据标定板距离超声波雷达2的距离实时显示解析出的距离数据,并绘制曲线图。
27.智能摄像头1上位机软件,启动后可显示摄像头1实时采集视频数据,并用矩形框住图像中的人、车等对象。
28.can工具上位机软件,可实时读取、保存、回放can卡所采集can报文,并可通过导入dbc文件实现can报文解析,对can通讯相关知识能进行实际学习和锻炼。
29.在本实施例中,一种自动驾驶感知端传感器教学台架,在外接220v ac电源后,通过启动台架底座后端内集成的电源转换器与台架,即可完成台架整体正常上电。后续,可通过台架面板中所集成的按钮开关,控制所有感知端传感器的启停,此时,可根据面板上绘制的线路走向,了解各感知传感器的供电、信号等线路的连接方式。
30.台架启动后,在led显示屏中双击打开台架中所安装的上位机管理软件,进入所有传感器上位机软件管理界面,此时通过点击界面中对应传感器名称的按钮,即可进入相应传感器上位机管理界面中,如点击“激光雷达”按钮,即可打开并进入激光雷达上位机管理软件中。
31.针对各感知传感器所感知数据类型与通讯方式的不同,对应上位机软件中显示效果与配置功能不同,360
°
激光雷达15可实时扫描雷达周围一周的环境变化,根据反射回的激光情况形成点云,此时激光雷达上位机中可实时显示数值变化与点云地图,可实时显示周围行人、物体大致点云形状并根据运行状态实时更新,可直观展示激光雷达运行效果。在实际教学中,老师可根据点云地图的变化情况,介绍激光雷达的基本工作原理、在自动驾驶车辆中所起作用、实时变化的数据意义等基本知识。
32.点击管理界面中的“毫米波雷达”按钮,启动毫米波雷达上位机软件。点击界面中“start”按钮后,上位机自动索引毫米波雷达所连接的can通道,并实时读取can报文并解析出具体参数对应数值进行滚动播放,同时也界面中将毫米波雷达工作效果进行可视化展示。毫米波雷达可对应滑动导轨2及其上标定板2,教学时通过滑动导轨2上的滑块,改变标定板与毫米波雷达的实际距离,可改变毫米波反射时长,即可改变其所采集外部环境参数,
软件界面中的实时数据、可视化图形也会相应进行改变。
33.点击“超声波”按钮打开超声波上位机,配置波特率、can通道后,点击打开设备,即可使超声波上位机实时接收并解析can报文,显示出障碍物距超声波雷达的距离参数并绘制为波形图。超声波雷达对应滑动导轨1及其上的标定板1,与毫米波雷达相同,教学中可通过调节标定板1的位置,测试超声波所采数据的变化。
34.同理打开组合惯导上位机,进入对应上位机界面,打开对应端口后会对经纬度、转向角、方向角、加速度等参数进行实时显示。在实际教学中,台架所在位置基本保持不变,可能存在gps信号弱等情况,各参数数据变化较小,此时因聚焦于介绍通讯原理、各个参数的含义及其起到的作用。
35.智能摄像头软件启动后,点击启动标志后可在界面中实时显示摄像头所采视频信息,并将视频图像中的人、车等图形用矩形框住,并可根据人物位置变化而实时改变。智能摄像头在当前实际自动驾驶中,主要与激光点云进行融合识别,进行静动态障碍物识别、车道线识别等作用,应在教学中主要介绍以上知识。
36.can工具软件可根据实际使用can卡型号,手动选择对应打开方式,并进行实时can数据的播报、记录、回放等操作。can通讯是汽车通讯方式中的重要一环,教学时可通过该工具实际演示、操练、讲解can报文读取方式,并让学生进行实际操作,熟悉基本can卡使用方式。
37.以上,通过实时点云、数值、图形、曲线、can报文等方式进行各感知端传感器的数据显示,可配合老师的讲解和操作直观的展示相关基础知识,为学习自动驾驶感知端传感器知识提供了极大的便利,是一种可靠、创新性的自动驾驶知识教学方法。
38.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
39.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
40.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1