一种多功能仿生手语双向翻译装置的制作方法
1.本实用新型具体是一种多功能仿生手语双向翻译装置,涉及双向翻译装置相关领域。
背景技术:
2.现实生活中,正常人既可以获得视觉信息也可以获得听觉信息,聋哑人则只能利用视觉信息,正常人与聋哑人通常以手语作为媒介进行交流,但绝大多数正常人对手语知之甚少,根本无法与聋哑人进行会话,使得正常人与聋哑人之间存在难以克服的交流障碍,需要利用双向翻译装置对交流进行辅助。
3.当双向翻译装置在使用过程中其朝向较为固定,当交流的人位于不同的位置处时容易出现背对着翻译装置,这使得背对翻译装置的人难以对装置所展示的手语进行观察,从而降低了翻译装置的实用性。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种多功能仿生手语双向翻译装置。
5.本实用新型是这样实现的,构造一种多功能仿生手语双向翻译装置,该装置包括控制器、机体,所述控制器嵌入于机体前端面顶部,所述调节机构设置于机体底部,所述调节机构包括连接筒、底座、滚轮、红外感应器、安装孔、定位机构、电机、蜗杆、蜗轮和轴杆,所述连接筒紧固于底座顶端面中部,且连接筒贴合于机体底端面,所述滚轮安装于底座底端面边沿处,所述红外感应器通过定位机构相连接于安装孔内侧,所述安装孔开设于底座侧表面,所述电机锁合于底座内侧底端面,且电机后端输出轴相连接于蜗杆前端面,所述蜗杆与蜗轮相互啮合,所述蜗轮转动安装于底座内侧底端面中部,所述轴杆相连接于蜗轮内圈,且轴杆穿过底座内侧顶端面中部和连接筒内侧后相连接于机体底端面中部。
6.优选的,所述控制器底部设置有手语识别器和语音识别器,所述机体左右两端顶部安装有机械手,所述手语识别器和语音识别器安装于机体前端面底部,所述手语识别器位于语音识别器左侧。
7.优选的,所述定位机构包括固定环、u型板、l型压板、橡胶片、插槽和金属卡片,所述固定环内圈相连接于红外感应器外侧后端,所述u型板锁合于底座内侧端面,所述l型压板外侧右端与u型板内侧转动连接,且l型压板外侧左端活动伸入于插槽内侧,所述橡胶片粘贴于l型压板内侧后端面,且橡胶片紧贴于固定环后端面,所述插槽开设于底座内侧端面,且插槽位于安装孔左侧,所述金属卡片安装于l型压板左端面,且金属卡片紧贴于插槽内侧。
8.优选的,所述滚轮设置有四个于底座底端面,且四个滚轮分别位于底座底端面四端。
9.优选的,所述连接筒侧表面与连接筒顶端面和机体底端面相垂直,且连接筒内径
相对应于轴杆外径。
10.优选的,所述红外感应器和安装孔均为等间距环状分布有两个以上于底座上,且红外感应器外侧设置有相对应的定位机构。
11.优选的,所述固定环前端面为弧形结构,且固定环前端面与底座内侧端面相平行。
12.优选的,所述金属卡片为倾斜的l字外形,且插槽内侧为相配合的l型结构。
13.本实用新型具有如下优点:本实用新型通过改进在此提供一种多功能仿生手语双向翻译装置,与同类型设备相比,具有如下改进:
14.优点1:本实用新型所述一种多功能仿生手语双向翻译装置,通过设置了调节机构于机体底部,通过红外感应器不同人群的位置,然后可通过轴杆带动机体和机械手进行转动,从而使得机械手在进行手语比划的过程中正对翻译装置展示的手语进行观察,达到了将翻译装置进行快速转动对准使用的人群,提高了翻译装置实用性的有益效果。
15.优点2:本实用新型所述一种多功能仿生手语双向翻译装置,通过红外感应器和安装孔均为等间距环状分布有两个以上于底座上,且红外感应器外侧设置有相对应的定位机构,便于通过不同方位的红外感应器对不同方位的人群进行感应,从而不便对机体整体的朝向进行调节。
附图说明
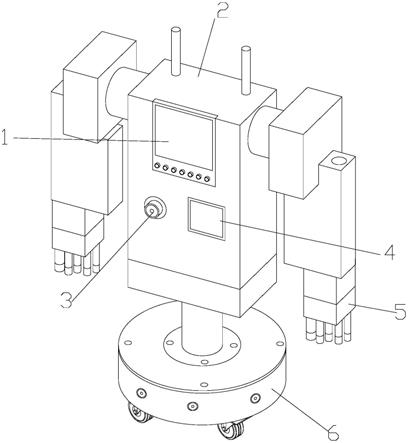
16.图1是本实用新型结构示意图;
17.图2是本实用新型的调节机构结构示意图;
18.图3是本实用新型的底座俯视剖面结构示意图;
19.图4是本实用新型的轴杆连接结构示意图;
20.图5是本实用新型的图3中a处结构放大示意图。
21.其中:控制器
‑
1、机体
‑
2、手语识别器
‑
3、语音识别器
‑
4、机械手
‑
5、调节机构
‑
6、连接筒
‑
61、底座
‑
62、滚轮
‑
63、红外感应器
‑
64、安装孔
‑
65、定位机构
‑
66、电机
‑
67、蜗杆
‑
68、蜗轮
‑
69、轴杆
‑
610、固定环
‑
661、u型板
‑
662、l型压板
‑
663、橡胶片
‑
664、插槽
‑
665、金属卡片
‑
666。
具体实施方式
22.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1,本实用新型通过改进在此提供一种多功能仿生手语双向翻译装置,包括控制器1、机体2,控制器1嵌入于机体2前端面顶部,控制器1底部设置有手语识别器3和语音识别器4,机体2左右两端顶部安装有机械手5,手语识别器3和语音识别器4安装于机体2前端面底部,手语识别器3位于语音识别器4左侧。
24.请参阅图2至图4,本实用新型通过改进在此提供一种多功能仿生手语双向翻译装置,调节机构6设置于机体2底部,调节机构6包括连接筒61、底座62、滚轮63、红外感应器64、安装孔65、定位机构66、电机67、蜗杆68、蜗轮69和轴杆610,连接筒61紧固于底座62顶端面
中部,且连接筒61贴合于机体2底端面,连接筒61侧表面与连接筒61顶端面和机体2底端面相垂直,且连接筒61内径相对应于轴杆610外径,使得轴杆610更稳定的带动机体2进行转动,滚轮63安装于底座62底端面边沿处,滚轮63设置有四个于底座62底端面,且四个滚轮63分别位于底座62底端面四端,使得机体2在移动的过程中更加稳定,红外感应器64通过定位机构66相连接于安装孔65内侧,红外感应器64和安装孔65均为等间距环状分布有两个以上于底座62上,且红外感应器64外侧设置有相对应的定位机构66,便于通过不同方位的红外感应器64对不同方位的人群进行感应,从而不便对机体整体的朝向进行调节,安装孔65开设于底座62侧表面,电机67锁合于底座62内侧底端面,且电机67后端输出轴相连接于蜗杆68前端面,蜗杆68与蜗轮69相互啮合,蜗轮69转动安装于底座62内侧底端面中部,轴杆610相连接于蜗轮69内圈,且轴杆610穿过底座62内侧顶端面中部和连接筒61内侧后相连接于机体2底端面中部。
25.请参阅图5,本实用新型通过改进在此提供一种多功能仿生手语双向翻译装置,定位机构66包括固定环661、u型板662、l型压板663、橡胶片664、插槽665和金属卡片666,固定环661内圈相连接于红外感应器64外侧后端,固定环661前端面为弧形结构,且固定环661前端面与底座62内侧端面相平行,使得固定环661更稳定的贴合在底座62的内侧端面,u型板662锁合于底座62内侧端面,l型压板663外侧右端与u型板662内侧转动连接,且l型压板663外侧左端活动伸入于插槽665内侧,橡胶片664粘贴于l型压板663内侧后端面,且橡胶片664紧贴于固定环661后端面,插槽665开设于底座62内侧端面,且插槽665位于安装孔65左侧,金属卡片666安装于l型压板663左端面,且金属卡片666紧贴于插槽665内侧,金属卡片666为倾斜的l字外形,且插槽665内侧为相配合的l型结构,便于金属卡片666进入到插槽665内侧进行固定放置。
26.本实用新型通过改进提供一种多功能仿生手语双向翻译装置,工作原理如下;
27.第一,首先推动机体2带动滚轮63转动而将该装置整体移动至恰当的位置上后,然后可通过控制器1对该装置进行开启;
28.第二,在该装置开启之后可通过控制器1对机体2、机械手5和红外感应器64的使用进行设置,通过红外感应器64先检测一方的人的位置,通过启动电机67带动蜗杆68进行转动,而蜗杆68在转动之后带动相啮合的蜗轮69进行转动,以及蜗轮69通过轴杆610带动相连接于机体2进行转动,从而实现机体2带动手语识别器3和语音识别器4进行转动对准于红外感应器64所感应到人的对面,此时机体2正对的人可进行手语或者语音的输入,当人在进行手语或者语音输入完毕后可进行停顿一段时间;
29.第三,当手语识别器3和语音识别器4检测到输入的人动作停止后可反向启动电机67,此时电机67带动机体2进行反向转动复位而对准于另一个待交流的人,而控制器1则对前一个人所输入的语音通过通过语音识别器4识别后由机械手5进行手语的比划,而如果前一个人输入的是手语则可通过手语识别器3进行识别,并且将识别的内容通过控制器1上的语音进行播报。
30.本实用新型通过改进提供一种多功能仿生手语双向翻译装置,通过红外感应器64不同人群的位置,然后可通过轴杆610带动机体2和机械手5进行转动,从而使得机械手5在进行手语比划的过程中正对翻译装置展示的手语进行观察,达到了将翻译装置进行快速转动对准使用的人群,提高了翻译装置实用性的有益效果,通过红外感应器64和安装孔65均
为等间距环状分布有两个以上于底座62上,且红外感应器64外侧设置有相对应的定位机构66,便于通过不同方位的红外感应器64对不同方位的人群进行感应,从而不便对机体2整体的朝向进行调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1