一种实训教学用轮式机器人
1.本技术涉及教学设备技术领域,特别涉及一种实训教学用轮式机器人。
背景技术:
2.教学仪器设备定义为:教学、科研单位中,使用方向为教学或科研的仪器设备。教学仪器设备可分为实验和实训两大类,主要应用于理工类各专业。
3.计算机学科作为传统工程教育学科,包含嵌入式系统设计、计算机组成原理等内容,在其教学过程中需要应用大量工程教学设备。目前计算机学科工程教育中采用的轮式机器人实训教学设备主要有stm32开发板组装系统、arduino uno开发板组装系统、risc-v开发板组装系统等几种。
4.但是,上述多种组装系统的部件较多且零散,拼装时间较长,且拼装后接口位置难以固定,以此组装后的整体系统稳定性较差。
技术实现要素:
5.本技术实施例提供一种实训教学用轮式机器人,以解决相关技术中零件拼装所需时间较长,接口位置难以固定,影响系统稳定性的技术问题。
6.一种实训教学用轮式机器人,其包括:车架以及设于车架上的:
7.操控部件,其包括pcb电路板以及集成于所述pcb电路板上的功能组件,所述功能组件接收指令或输出指令;
8.动力部件,其根据所述操控部件的指令而带动车架运动。
9.一些实施例中,所述动力部件包括:
10.电池盒,其连接于所述车架,用于装载电池以给所述操控部件提供电能;
11.多个电机,其连接于所述车架,且由所述操控部件控制驱动;
12.多个车轮,多个所述车轮分别与多个所述电机驱动连接,以带动所述车架运动。
13.一些实施例中,所述功能组件包括电源接口模块,其集成于所述pcb电路板,所述电源接口模块与电池盒连接,以使所述pcb电路板获取电能。
14.一些实施例中,所述功能组件还包括信号接口模块,其集成于所述pcb电路板,用于接受控制指令以驱动多个所述电机运行。
15.一些实施例中,所述功能组件还包括控制模块,其集成于所述pcb电路板,以计算所述多个所述电机的实时运动数据。
16.一些实施例中,所述功能组件还包括电机驱动模块,其集成于所述pcb电路板,所述电机驱动模块控制多个所述电机分别运行。
17.一些实施例中,所述功能组件还包括pcb功能性电路模块,其包括:
18.指示型功能模块,其集成于所述pcb电路板,以发出声光信号;
19.支撑型功能模块,其集成于所述pcb电路板,以支撑所述电源接口模块、信号接口模块、控制模块和电机驱动模块的正常运行。
20.一些实施例中,所述车架包括安装板,所述操控部件和所述动力部件均连接于所述安装板上。
21.一些实施例中,所述车架还包括两个保护板和多个紧固件,两个所述保护板分别间隔设于所述安装板的上下两侧,且所述保护板和所述安装板之间通过多个所述紧固件连接。
22.一些实施例中,所述紧固件包括螺杆,所述螺杆穿设于所述保护板和所述安装板,并与所述保护板和所述安装板连接。
23.本技术提供的技术方案带来的有益效果包括:
24.本技术实施例提供了一种实训教学用轮式机器人,操控部件控制动力部件工作,以带动车架运行,由于操控部件中的功能组件集成于一块pcb电路板上,实现所需功能的部件均集成至pcb电路板上,省去了组装的过程,且各个部件的接口均随其连接至车架上,提高了整个轮式机器人的稳定性。
附图说明
25.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1为本技术实施例提供的实训教学用轮式机器人正视图;
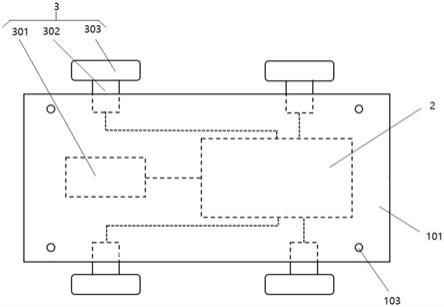
27.图2为本技术实施例提供的实训教学用轮式机器人结构示意图;
28.图3为本技术实施例提供的操控部件的示意图。
29.图中:1、车架;101、安装板;102、保护板;103、紧固件;2、操控部件;3、动力部件;301、电池盒;302、电机;303、车轮。
具体实施方式
30.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
31.本技术实施例提供了一种实训教学用轮式机器人,其能解决相关技术中组装系统的部件较多且零散,拼装时间较长,且拼装后接口位置难以固定,以此组装后的整体系统稳定性较差的技术问题。
32.一种实训教学用轮式机器人,其包括:车架1以及设于车架1上的:
33.操控部件2,其包括pcb电路板以及集成于所述pcb电路板上的功能组件,所述功能组件接收指令或输出指令;
34.动力部件3,其根据所述操控部件2的指令而带动所述车架1运动。
35.参照图1和图2,其中,该实训教学用轮式机器人包括车架1和设置在车架1上的操控部件2和动力部件3。
36.参照图2和图3,操控部件2包括pcb电路板和集成于pcb电路板上的功能组件。pcb
电路板为双面印制的电路板。功能组件包括多种用于接受指令或发出至指令的模块。功能组件中的多个模块均采用贴片工艺集成于pcb电路板上,而无需额外的组装和拼接过程。
37.参照图1和图2,动力部件3连接于车架1上,且动力部件3与操控部件2电连接,以接收操控部件2的指令,而带动车架1相应运动。
38.这样设置,操控部件2控制动力部件3工作,以带动车架1运行,由于操控部件2中的功能组件集成于一块pcb电路板上,实现所需功能的部件均集成至pcb电路板上,省去了组装的过程,且各个部件的接口均随其连接至车架1上,提高了整个轮式机器人的稳定性。
39.可选地,所述动力部件3包括:
40.电池盒301,其连接于所述车架1,用于装载电池以给所述操控部件2提供电能;
41.多个电机302,其连接于所述车架1,且由所述操控部件2控制驱动;
42.多个车轮303,多个所述车轮303分别与多个所述电机302驱动连接,以带动所述车架1运动。
43.参照图1和图2,其中,动力部件3包括电池盒301、多个电机302和多个车轮303。
44.电池盒301自身含有ph2.0单头接线。电池盒301粘结或通过螺钉固定在车架1上,其用于装载干电池。电池盒301与操控部件2连接,以给操控部件2提供电能。
45.参照图1和图2,本实施例中,电机302的数量设有四个,四个电机302均通过电机302架固定至车架1上,且四个电机302两两分组,两组电机302分别靠近车架1的相对两侧设置。电机302与操控部件2连接,以由操控部件2四个电机302的运行。本实施例中,电机302包括520gb直流减速电机,其自身含390线ab双相增量式霍尔编码器。
46.车轮303的数量对应电机302的数量设有四个,四个车轮303分别与四个电机302驱动连接,以利用电机302带动车轮303运行,而带动车架1移动。
47.可选地,所述功能组件包括电源接口模块,其集成于所述pcb电路板,所述电源接口模块与电池盒301连接,以使所述pcb电路板获取电能。
48.参照图2和图3,其中,功能组件包括电源接口模块,其集成于pcb电路板上,且电源接口模块与电池盒301连接,以给pcb电路板供电,因此给功能组件中的多个模块供电,同时将电能供给至电机302。
49.可选地,所述功能组件还包括信号接口模块,其集成于所述pcb电路板,用于接受控制指令以驱动多个所述电机302运行。
50.参照图2和图3,其中,功能组件还包括信号接口模块,其集成于pcb电路板,其包括ft232rl微芯片。信号接口模块接收外界的控制指令,以此驱动电机302运行,而便于将驱动电机302运行的指令输入至pcb电路板上。
51.可选地,所述功能组件还包括控制模块,其集成于所述pcb电路板,以计算所述多个所述电机302的实时运动数据。
52.参照图2和图3,其中,功能组件还包括控制模块,其集成于pcb电路板上。控制模块包括atmega微芯片。控制模块计算四个电机302的实时运动数据。以便于后续根据指令而改变电机302的运动状态。
53.可选地,所述功能组件还包括电机驱动模块,其集成于所述pcb电路板,所述电机驱动模块控制多个所述电机302分别运行。
54.参照图2和图3,其中,功能组件还包括电机驱动模块,其集成于所述pcb电路板。电
机驱动模块包括tb6612fng微芯片。电机驱动模块接收控制模块的数据,且接收来自信号接口模块的指令,而转换成符合控制指令的数据,控制不同电机302接收不同或相同频率的电流,以使多个电机302以不同或相同的状态运动,而便于控制车架1直线运动或转向运动。
55.可选地,所述功能组件还包括pcb功能性电路模块,其包括:
56.指示型功能模块,其集成于所述pcb电路板,以发出声光信号;
57.支撑型功能模块,其集成于所述pcb电路板,以支撑所述电源接口模块、信号接口模块、控制模块和电机驱动模块的正常运行。
58.参照图2和图3,其中,功能组件还包括pcb功能性电路模块,pcb功能性电路模块均集成与pcb电路板。pcb功能性电路模块包括指示型功能模块和支撑型功能模块。
59.指示型功能模块集成于pcb电路板,包括led(蓝色)3个、led(黄色)3个、led(红色)2个、led(绿色)1个和电磁式有源蜂鸣器(dc3v)1个。通过指示型功能模块以发生声光信号。
60.支撑型功能模块集成于pcb电路板,包括插座(dg/kf128-5.08mm 2p)4个、单排母座(15针)2个、单排母座(8针)2个、单排母座(6针)1个、单排母座(4针)1个、单排铜针(40针)1个、三端稳压器(7085)1个、电阻(1k)7个、电容(0.1u)8个、电容(4.7u)2个、电容(10u)1个、电容(220u)2个、保险(1.5a)1个、保险(1.0a)1个、电源开关(8*8*8贴片式2脚)1个、复位开关(3*6*2.5贴片式2脚)1个、电源插座(ph2.02p)1个、电机302插座(ph2.0 6p)4个、usb插座(mirco usb)1个、稳压二极管(mbr0520)1个。通过支撑型功能模块以支持该pcb电路板正常运行。
61.其中,15针单排母座是2个为一组,一是可作为扩展接口,通过杜邦线插针的形式与智能mcu相连(如树莓派、gd32v等),实现智能化控制(避障、导航等)。二是本身可作为atmega微芯片的备份引脚,防止因贴片印刷工艺、或其他流水线生产的电气问题而导致tb6612fng微芯片无法启动,整块pcb电路板报废,若出现此类问题,则插入替代atmega微芯片(引脚已焊接的版型)即可。
62.8针单排母座是2个为一组,作为tb6612fng微芯片的备份引脚,防止因贴片印刷工艺、或其他流水线生产的电气问题而导致tb6612fng微芯片无法启动,整块pcb电路板报废,若出现此类问题,则插入替代tb6612fng微芯片(引脚已焊接的版型)即可。
63.6针单排母座是作为扩展通信模块的外接接口,提供state(对象状态数据接口)、tx(串口发送)、rx(串口接收)、gnd(接地)、vin(稳压前电压输入端)、en(模式切换)共6种接口。
64.4针单排母座是作为扩展传感器的外接接口,提供电源(3.3v)、gnd(接地)、scl(控制线端口)、sda(数据线端口)共4种接口。
65.在其他实施例中,还可加装物联网传感器和嵌入式人工智能模组至该pcb电路板上,以实现寻径、避障、导航、地图绘制等扩展功能。
66.可选地,所述车架1包括安装板101,所述操控部件2和所述动力部件3均连接于所述安装板101上。
67.参照图1和图2,其中,车架1包括安装板101,操控部件2和动力部件3均连接于安装板101上。电池盒301固定在安装板101的顶面,且pcb电路板也固定在安装板101的顶面。电机302固定在安装板101的底面,且靠近安装板101的边沿设置。
68.可选地,所述车架1还包括两个保护板102和多个紧固件103,两个所述保护板102
分别间隔设于所述安装板101的上下两侧,且所述保护板102和所述安装板101之间通过多个所述紧固件103连接。
69.可选地,所述紧固件103包括螺杆,所述螺杆穿设于所述保护板102和所述安装板101,并与所述保护板102和所述安装板101连接。
70.参照图1和图2,其中,车架1还包括两个保护板102和多个紧固件103,本实施例中,保护板102包括亚克力板。两个保护板102分别位于安装板101的上下两侧,且均与安装板101间隔设置,且保护板102与安装板101平行设置,以对安装板101上的操控部件2进行遮挡保护。
71.本实施例中,紧固件103包括螺杆,且螺杆的数量优选为4个,四个螺杆分别靠近安装板101的四角设置。且螺杆穿设于保护板102和安装板101,本实施例中,通过螺母将螺杆与安装板101或保护板102固定。以此维持安装板101和保护板102之间的距离,通过安装板101、保护板102和螺杆以形成车架1。
72.在本技术的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
73.需要说明的是,在本技术中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
74.以上所述仅是本技术的具体实施方式,使本领域技术人员能够理解或实现本技术。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1