升降式桥梁模型的制作方法
1.本技术涉及建筑沙盘模型的领域,尤其是涉及一种升降式桥梁模型。
背景技术:
2.建筑模型是以微缩实体的方式来表示建筑物的造型及与周边环境地理关系,将建筑设计师的意图转化成具体实物,使用户直观地了解设计师的意图和构想。建筑沙盘模型主要应用于房地产开发、政府规划、设计院方案讲解、消失或损坏建筑物的还原等工作领域。
3.在一些桥梁建筑工程中,在修建过程中会经过铁路区域,由于桥梁修建周期长,直接在修建区域进行施工非常不便,不仅会对铁路的正常运行造成影响,而且容易发生安全事故。因此位于铁路上方的桥梁段通常采用将桥梁体预浇筑成构件,然后采用拼接的方式将该段桥梁拼接到桥梁主体上完成修建。
4.在施工前需要采用等比建筑模型进行模拟观察以提高施工时的准确性,因此需要一种桥梁模型来实现上述工况的模拟。
技术实现要素:
5.为了提供一种桥梁拼接工况模拟展现的桥梁模型,本技术提供一种升降式桥梁模型。
6.本技术提供的一种升降式桥梁模型采用如下的技术方案:
7.一种升降式桥梁模型,包括:
8.模型主体,所述模型主体上设置有可活动的桥梁拼接段;
9.安装架,所述安装架设置于模型主体的底部,所述安装架上设置有第一传感器和第二传感器;
10.气缸,所述气缸设置于所述安装架上,所述气缸的活塞杆上设置有安装板,所述第一传感器和第二传感器沿气缸活塞杆的伸缩方向间隔分布;
11.步进电机,所述步进电机设置于安装板上,所述步进电机的外壁上设置有第三传感器和第四传感器,所述步进电机的输出轴固定连接有连接杆,所述连接杆与步进电机的输出轴同轴设置,所述连接杆上套设有感应块,所述连接杆滑动穿设于模型主体且固定连接于桥梁拼接段;
12.控制箱,所述控制箱设置于模型主体的底部,所述气缸、步进电机、第一传感器、第二传感器、第三传感器以及第四传感器均与控制箱电连接。
13.通过采用上述技术方案,气缸用于控制桥梁拼接段升降,步进电机用于控制桥梁拼接段旋转,初始状态时,安装板与第一传感器相对,感应块与第三传感器相对,启动后,气缸驱动安装板上升以带动步进电机和桥梁拼接段上升,当安装板上升至与第二传感器相对的位置时,第二传感器控制气缸停止运行,此时步进电机转动带动桥梁拼接段旋转,当感应块与第四传感器相对时,步进电机停止转动,完成桥梁拼接段与模型主体的分离,复位时,
步进电机转动至感应块与第三传感器相对,气缸驱动安装板下降至与第一传感器相对,实现桥梁拼接段的复原;通过本技术可直观地展现拼接式桥梁的结构及拼接施工过程。
14.可选的,所述安装板上连接有导柱,所述导柱沿气缸活塞杆的伸缩方向滑动穿设于安装架。
15.通过采用上述技术方案,导柱能够对安装板的升降起到导向作用,使安装板的升降更平稳、更精准。
16.可选的,所述导柱绕气缸活塞杆的轴线对称设置有两个。
17.通过采用上述技术方案,两个对称设置的导柱能够进一步提高安装板升降时的平稳性和精准性,降低了安装板偏移的可能性。
18.可选的,所述安装架上设置有与导柱相配合的导向套,所述导柱滑动穿设于导向套。
19.通过采用上述技术方案,导向套的设置能够进一步对安装板的升降起到导向作用,同时导柱与导向套的接触面积更大,使安装板升降时更加平稳。
20.可选的,所述安装架上沿气缸活塞杆的伸缩方向设有滑槽,所述第一传感器和第二传感器均穿设于滑槽内,所述第一传感器的外壁和第二传感器的外壁上均设有螺纹,所述第一传感器及第二传感器上均螺纹套设有固定螺母,所述第一传感器和第二传感器通过固定螺母进行固定。
21.通过采用上述技术方案,滑槽的设置便于根据模型的实际需求对第一传感器和第二传感器的位置进行调整,以实现桥梁拼接段升降高度的调整,固定螺母用于在第一传感器和第二传感器的位置调整好后进行固定,避免第一传感器和第二传感器松动下滑而导致桥梁拼接段的升降出现偏差。
22.可选的,所述固定螺母与安装架之间设置有垫片。
23.通过采用上述技术方案,垫片能够提高固定螺母与安装架连接的牢固性,降低了第一传感器和第二传感器松动的可能性。
24.可选的,所述第三传感器和第四传感器可拆卸连接于步进电机。
25.通过采用上述技术方案,第三传感器和第四传感器的可拆卸安装便于根据模型的实际需求对第三传感器和第四传感器的位置进行调整,以实现桥梁拼接段旋转角度的调整。
26.可选的,所述第一传感器、第二传感器、第三传感器以及第四传感器均为霍尔传感器,所述安装板上设置有第一感应磁片,所述感应块上设置有第二感应磁片。
27.通过采用上述技术方案,霍尔传感器体积小、重量轻,安装方便,对于安装架的负荷小,且对灰尘、水汽的污染和侵蚀有很强的适应能力,不易损坏,使用寿命长;第一感应磁片用于和第一传感器及第二传感器实现感应,第二感应磁片用于和第三传感器及第四传感器实现感应。
28.综上所述,本技术包括以下至少一种有益技术效果:
29.1.本技术通过气缸控制桥梁拼接段的升降,通过步进电机控制桥梁拼接段的旋转,可直观地展现拼接式桥梁的结构及拼接施工过程初始状态时,并且通过第一传感器和第二传感器控制桥梁拼接段升降的高度,通过第三传感器和第四传感器控制桥梁拼接段旋转的角度,精准度高;
30.2.导柱的设置能够对安装板的升降起到导向作用,使安装板的升降更平稳、更精准;
31.3.滑槽的设置便于根据模型的实际需求对第一传感器和第二传感器的位置进行调整,以实现桥梁拼接段升降高度的调整;
32.4.第三传感器和第四传感器的可拆卸安装便于根据模型的实际需求对第三传感器和第四传感器的位置进行调整,以实现桥梁拼接段旋转角度的调整。
附图说明
33.图1是本技术实施例桥梁拼接段拼接时的示意图;
34.图2是本技术实施例底部的结构示意图;
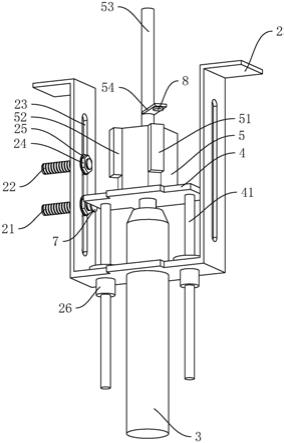
35.图3是本技术实施例安装架及相关结构的示意图;
36.图4是本技术实施例桥梁拼接段升起时的示意图;
37.附图标记说明:1、模型主体;11、桥梁拼接段;2、安装架;21、第一传感器;22、第二传感器;23、滑槽;24、固定螺母;25、垫片;26、导向套;3、气缸;4、安装板;41、导柱;5、步进电机;51、第三传感器;52、第四传感器;53、连接杆;54、感应块;6、控制箱;7、第一感应磁片;8、第二感应磁片。
具体实施方式
38.以下结合附图对本技术作进一步详细说明。
39.本技术实施例公开一种升降式桥梁模型。参照图1和图2,升降式桥梁模型包括模型主体1、通过螺栓固定安装于模型主体1底部的安装架2、通过螺栓固定安装于安装架2上的气缸3、通过螺栓固定安装于气缸3活塞杆端部的安装板4、以及通过螺栓固定安装于安装板4上的步进电机5,模型主体1上活动安装有桥梁拼接段11。
40.气缸3的活塞杆沿竖直方向设置,安装板4沿水平方向设置,步进电机5的输出轴沿竖直方向设置。
41.参照图2,步进电机5的输出轴上固定连接有连接杆53,连接杆53与步进电机5的输出轴同轴设置且滑动穿设于模型主体1,桥梁拼接段11固定连接于连接杆53远离步进电机5的一端。
42.参照图3,安装架2的一侧安装有第一传感器21和第二传感器22,第一传感器21和第二传感器22沿气缸3活塞杆伸缩方向间隔分布且第一传感器21位于第二传感器22的下方。
43.步进电机5的外壁上安装有第三传感器51和第四传感器52,连接杆53上固定套设有感应块54。
44.本实施例中,第一传感器21、第二传感器22、第三传感器51以及第四传感器52均采用霍尔传感器,安装板4靠近第一传感器21的一侧固定安装有用于与第一传感器21及第二传感器22相感应的第一感应磁片7,感应块54的下表面固定安装有用于与第三传感器51及第四传感器52相感应的第二感应磁片8。
45.参照图2,模型主体1的底部还安装有控制箱6,气缸3、步进电机5、第一传感器21、第二传感器22、第三传感器51以及第四传感器52均与控制箱6电连接。初始状态时,第一感
应磁片7与第一传感器21相对,第二感应磁片8与第三传感器51相对。
46.参照图4,运行时,气缸3驱动安装板4上升以带动桥梁拼接段11上升,当第一感应磁片7与第二传感器22相对时,气缸3停止运行,此时步进电机5转动带动桥梁拼接段11旋转,当第二感应磁片8与第四传感器52相对时,步进电机5停止转动,桥梁拼接段11与模型主体1分离开。
47.参照图3,为了提高安装板4升降时的平稳性和精准性,安装板4的下表面固定连接有两根导柱41,两根导柱41绕气缸3活塞杆的轴线对称分布且沿气缸3活塞杆的伸缩方向滑动穿设于安装架2,气缸3控制桥梁拼接段11升降时,导柱41能够对安装板4的升降进行导向,从而降低了安装板4偏移的可能性。
48.安装架2上固定安装有与导柱41一一配合的导向套26,导柱41滑动穿设于导向套26,导柱41与导向套26的接触面积更大,使安装板4在升降时更加平稳。
49.安装架2的侧壁上沿气缸3活塞杆的伸缩方向设有滑槽23,第一传感器21和第二传感器22均穿设于滑槽23内且可沿滑槽23滑动。第一传感器21的外壁和第二传感器22的外壁上均设有螺纹,第一传感器21及第二传感器22上均螺纹套设有两个固定螺母24,两固定螺母24分别位于安装架2侧壁的两侧,第一传感器21和第二传感器22通过固定螺母24固定于安装架2上。使用时可通过调整第一传感器21和第二传感器22的位置实现桥梁拼接段11升降高度的调整,固定螺母24用于在第一传感器21和第二传感器22的位置调整好后进行固定。
50.为了降低第一传感器21和第二传感器22松动的可能性,固定螺母24与安装架2之间安装有垫片25,垫片25套设于第一传感器21和第二传感器22上,从而提高固定螺母24与安装架2连接的牢固性。
51.为了实现桥梁拼接段11旋转角度的调整,第三传感器51和第四传感器52通过螺栓可拆卸安装于步进电机5上,使用时可通过调整第三传感器51和第四传感器52的位置调整桥梁拼接段11旋转的角度。
52.本技术实施例一种升降式桥梁模型的实施原理为:通过气缸3控制桥梁拼接段11的升降,通过步进电机5控制桥梁拼接段11的旋转,可直观地展现拼接式桥梁的结构及拼接施工过程初始状态时,并且通过第一传感器21和第二传感器22控制桥梁拼接段11升降的高度,通过第三传感器51和第四传感器52控制桥梁拼接段11旋转的角度,精准度高。
53.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1