呼吸力学监测与气道管理模拟教学模型
1.本实用新型涉及医疗器械领域,具体涉及呼吸力学监测与气道管理模拟教学模型。
背景技术:
2.机械通气,是重症患者最常使用的呼吸支持手段。绝大多数患者收入重症病房后建立了人工气道,需要机械通气治疗。机械通气与正常通气的区别是正压通气,因此在通气的过程中不可避免的可能会带来相关的损伤。因此我们在进行机械通气的过程中,最主要目的是保护肺泡,避免肺泡进一步损伤,同时维持患者的氧合,帮助患者度过呼吸支持或衰竭时期。
3.对机械通气患者需要进行系统性呼吸力学评估,其必要性主要体现在两个方面。首先,由于呼吸运动是在中枢的调控下呼吸肌及气道收缩或舒张进而驱动气体吸入或呼出的力学过程,因而需要机械通气的疾病本身会导致明显的呼吸力学异常,对基础疾病所致异常呼吸力学的理解与评估,可以明确是否存在严重的肺功能损害及其性质,有助于了解个体患者的疾病严重程度。其次,机械通气本质是提供外加的呼吸动力,通过改变吸气相和呼气相的气道压力,从而改变呼吸的流量、容量及时间节律,这个过程伴随患者的呼吸努力、吸气末和呼气末肺容量的变化。不同肺部疾病引起的病理生理学改变不同,其对应的呼吸力学特征不同,相应的机械通气策略和参数调节也存在显著的差异,恰当的治疗可以改善肺的通气和氧合功能,缓解呼吸困难,但不恰当的应用有可能导致人机不同步,加重呼吸困难,进而导致呼吸机相关性肺损伤,因此呼吸力学的评估可能发挥指导保护性机械通气设置的作用。如何来理解不同疾病情况下气道阻力和肺的弹性对于通气的影响,目前尚未有可以演示的方法,只能在患者上去实现,这样大大增加了临床的风险和不确定性。因此呼吸力学的监测是十分中重要的,相关的教学和演示显得十分必要。目前尚无比较理想和建议的模型来进行教学。
4.机械通气的患者建立了人工气道,如何维持人工气道也成为了呼吸治疗的关键问题。其中重要的一个方面就是痰液的引流。经气管插管后,由于器官插管位于声门下,很多的上气道的分泌物可以顺着气管插管留到声门上。上气道分泌物集聚于此,容易向下流入双肺,造成误吸肺炎的发生。因此针对气管插管的病人我们在气管插管上设置了气囊。气囊的压力大于气道压力,这样气囊周围才不会漏气,与此同时这个压力不能过大,因为过大会导致局部粘膜缺血坏死,出现气管食管漏的可能。因此对于气囊的调节也至关重要。现在有一种能够进行囊上吸引的气管插管进行囊上的分泌物清除。由此可见气管插管相关的管理对于气道管理是十分重要的,而目前缺乏能够进行相关插管功能的演示的教学装置,以便在体外模拟胸腔内呼吸运动从而直观地感受和测量不同生理病理状态下呼吸力学的改变。也没有能够直观的显示气管插管作用的模型,可以展示气道管理的相关细节操作。
技术实现要素:
5.本实用新型的目的在于提供一种呼吸力学监测与气道管理模拟教学模型,使用本模型可模拟肺顺应性改变;肺阻力改变;气道压力和胸腔压力的变化,气囊压力大小;进行痰液囊上吸引操作情况,可实现重要呼吸力学参数的测量,包括气道压力、食道压力、跨肺压力以及气囊压力,从而可以通过在体外模拟不同疾病造成的呼吸系统环境,测量气道内、胸腔内压力的变化,指导机械通气策略的改进,更精确地调整呼吸力学参数进行呼吸支持治疗。
6.本实用新型的一个方面,提供一种呼吸力学监测与气道管理模拟教学模型,包括胸腔模拟部件、气道模拟部件、食道模拟部件、肺模拟部件、气管插管模拟部件;
7.所述胸腔模拟部件为上部开口的中空腔体,底部包覆有模拟横膈的弹力膜;
8.所述气道模拟部件为第一导管,所述食道模拟部件为第二导管,所述第一导管和所述第二导管的一端分别通过所述上部开口插入所述胸腔模拟部件内部,并与所述开口部密封固定连接;
9.所述肺模拟部件为球囊,所述球囊套设固定在所述第一导管插入所述胸腔模拟部件内的一端;
10.所述气管插管模拟部件,包括气囊组件和第三导管,所述气囊组件包括充气部件和连接所述充气部件的气囊,所述气囊套设在所述第三导管中部,所述气囊充气将所述第三导管固定设置在所述第一导管内部。
11.以上所述的模型,其中,所述球囊包括若干个替换件,所述替换件分别采用弹性模量不同的材料。
12.以上所述的模型,其中,所述中空腔体整体为半球形。
13.以上所述的模型,其中,所述胸腔模拟部件、气道模拟部件、食道模拟部件、肺模拟部件和气管插管模拟部件均为透明材质。
14.以上所述的模型,其中,所述气道模拟部件、食道模拟部件与所述胸腔模拟部件之间为可拆卸连接,所述肺模拟部件与所述气道模拟部件之间为可拆卸连接。
15.以上所述的模型,其中,所述可拆卸连接为密封式可拆卸连接。
16.以上所述的模型,其中,所述密封式可拆卸连接包括螺纹连接、承插连接或法兰连接。
17.以上所述的模型,其中,所述弹力膜外侧设有辅助拉伸部件。优选地,所述辅助拉伸部件与所述弹力膜一体成型。
18.有益效果
19.1、本技术建立了体外的呼吸动力学与临床气道操作模拟的模型,可实现物理原理可视化教学,并通过物理参数测定实现机械通气操作中细节的定量优化;
20.2、能够在一个模型上实现多种压力模拟监测,包括气道压力、食道压力、跨肺压力以及气囊压力,从而有机会通过在体外模拟不同疾病造成的呼吸系统环境改变测量气道内、胸腔内压力的变化,指导机械通气策略的改进,更精确地调整呼吸力学参数进行呼吸支持治疗;
21.3、能够在一个模型上实现模拟肺顺应性改变;肺阻力改变;气囊压力大小;痰液囊上吸引操作等情况;
22.4、开发成为可拆卸部件组装形式的成套的模型,便于在组装的过程中体验各个部件和部件相关的生理功能。
附图说明
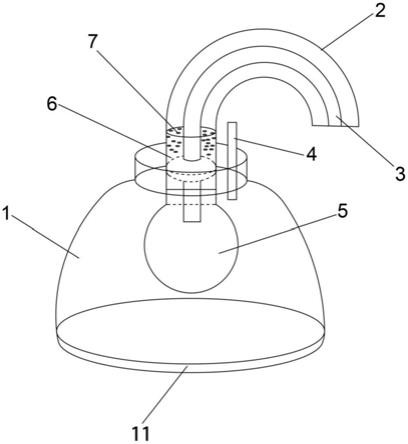
23.图1为本技术呼吸力学监测与气道管理模拟教学模型的示意图。
24.图2为给予容量控制通气加peep后得到的压力-时间波形。
25.图3为可充气气囊的受力示意图。
26.中空腔体1、弹力膜11、第一导管2、第三导管3、第二导管4、球囊5、气囊6、黏性液7
具体实施方式
27.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本技术的实施例进行详细说明。
28.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
29.如图1所示,本实用新型提供一种呼吸力学监测与气道管理模拟教学模型,包括胸腔模拟部件、气道模拟部件、食道模拟部件、肺模拟部件、气管插管模拟部件;胸腔模拟部件为上部开口的中空腔体1,底部包覆有模拟横膈的弹力膜11;优选地,中空腔体1为半球形;气道模拟部件为第一导管2,食道模拟部件为第二导管4(第二导管4同时也是用于创造负压的真空抽吸管,食道模拟只是该管的另一个功能,因为真实情况下食道本身并不通向胸腔,这里的模拟是一种近似模拟),第一导管2和第二导管4的一端分别通过上部开口插入胸腔模拟部件内部,并与开口部密封固定连接;肺模拟部件为球囊5,球囊5套设固定在第一导管2插入胸腔模拟部件内的一端;优选地,球囊5包括若干个替换件,替换件分别采用弹性模量不同的材料,每个替换件的球囊5的大小形状以及厚度均相同。以弹性模量不同的材料来展现肺顺应性的不同的情况,可以更好的演示呼吸力学的监测和测量。气管插管模拟部件,包括气囊组件和第三导管3,气囊组件包括充气部件和连接充气部件的气囊6,气囊6套设在第三导管3中部,气囊6充气将第三导管3固定设置在第一导管2内部。具体地,第三导管3外接呼吸机,充气部件6外接空气注射器,在充气部件6的上方覆盖有黏性液7,黏性液7模拟痰液。
30.优选地,胸腔模拟部件、气道模拟部件、食道模拟部件、肺模拟部件和气管插管模拟部件均为透明材质,可便于对各部件的运动情况进行观察,也便于操作调整。再优选地,气道模拟部件、食道模拟部件与胸腔模拟部件之间为可拆卸连接,肺模拟部件与气道模拟
部件之间为可拆卸连接。更优选地,可拆卸连接为密封式可拆卸连接;具体地,密封式可拆卸连接包括螺纹连接、承插连接或法兰连接。本实施例中采用螺纹连接,拆卸更方便快捷。便于使用者在组装各部件的过程中体验各个部件的位置情况以及理解各部件相关的生理功能。
31.优选地,弹力膜11外侧设有辅助拉伸部件(图中未示出),更优选地,辅助拉伸部件与弹力膜11一体成型,例如为凸起形式;拉伸部件便于在模拟自主吸气的情况下拉伸、放松弹力膜时使用。
32.使用本实用新型时,能够模拟自主呼吸过程和机械通气过程;
33.模拟自主呼吸过程的操作如下:密闭第一导管2和第三导管3,随后用注射器通过第二导管4抽气,从而降低中空腔体1的内腔气压,随后密闭第二导管4的上端出口,通过向下拉伸弹力膜11,使得球囊5被动膨胀模拟自主吸气;放松弹力膜11,球囊5被动回缩模拟自主呼气,如此通过不断拉抻和放松弹力膜11,能够模拟自主呼吸过程;
34.模拟机械通气过程的操作如下:密闭第一导管2和第三导管3,随后用注射器通过第二导管4抽气,从而降低中空腔体1的内腔气压,对气囊6充气使之外径契合第一导管2的内径,该过程系模拟通过气囊实现气囊与气道壁间的密闭性,此时通过第三导管3外接呼吸机给予机械通气,呼吸机相关的测量参数与会在呼吸机上显示,具体如下:
35.(1)监测患者的呼吸动力学参数
36.第三导管3接呼吸机,给予容量控制通气加peep,由此可得到如图2 的压力-时间波形,测得以下参数:呼气末正压p0(peep,positive end-expiratorypressure),气道平台压p1(pplat,plateau pressure),气道峰压p2(pip,peakinspiratory pressure),同时可测得每次呼吸潮气量vt,以及同周期内气道峰压降至气道平台压期间的流量v,由此,可计算以下气道生理参数:肺泡及胸壁的顺应性及气道阻力通过设定不同的容量及 peep值,能够观测c与raw的相应变化。
37.(2)跨肺压的监测
38.通过第二导管4测量胸腔内压p
ip
(intrapleural pressure),即模拟临床中通过食管压力测定替代胸腔压力,从而可计算平台期跨肺压p
tp (trans-pulmonary pressure),p
tp
=p
plat-p
ip
,通过设定不同的容量及peep值,可以观测p
tp
的相应变化。
39.(3)可充气气囊受力监测
40.气囊6的受力如图3所示,图中为气囊的冠状面截面,其中f1为气道内压,f2为外界大气压,f为气囊与气道壁间的静摩擦力,f
wall,l
和f
wall,lr
均为左侧、右侧气囊所受气道壁压力,由于受力平衡,有等式如下:
41.f=f1-f2
42.f1-f2=p
ventilator
×s43.其中,p
ventilator
为呼吸机所给气压,s为气囊水平最大截面面积,通过气囊材料的压力传感特性,可测得f
wall
。在相应容量控制模式下,调整气囊6的充气量(充入气体体积),观测f及f
wall
的变化,并得到机械通气模式下的最小气囊充气体积,即使pip处不滑动的最小充气量,以及该值与f,f
wall
的关系,通过设定不同的容量及peep值,能够分别确定相应最小气囊充气体积。
44.(4)模拟痰液囊上吸引
45.a、模拟机械通气状态:密闭第一导管2和第三导管3,随后用注射器通过第二导管4抽气,从而降低中空腔体1的内腔气压,对气囊6充气使之外径契合第一导管2的内径;
46.b、模拟气道分泌物的产生与囊上滞留:拉直第一导管2和第三导管3,于二者之间的间隙滴加黏性液7,使黏性液7于气囊6上的高度约为0.5cm,随后将第一导管2和第三导管3弯回原状态,使其模拟气道在口腔部的弯曲度;
47.c、模拟给予高于正常给气的吸气末正压:第三导管3外接呼吸机,使得球囊5和弹力膜11同时被动膨胀,应高于模拟自主呼吸过程中吸气末压力,使球囊5有更明显的膨胀;
48.d、模拟人工操作中痰液排除:停止给气,使得球囊5和弹力膜11被动回缩,同时将气囊6放气,观察黏性液7向上的运动状态并测量通过弯管排出第一导管2的黏性液7的量,调整吸气末压力,得到可有效排除90%以上黏性液7的最小吸气末压力,调整黏性液7的性质和量,重复上述步骤,分别测得每种情况下可有效排除90%以上黏性液7的最小吸气末压力,该过程需两人协同。
49.虽然,上文中已经用一般性说明及具体实施方案对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1