一种自动翻页机器人的制作方法
1.本实用新型涉及一种自动翻页机器人。
背景技术:
2.随着经济的不断发展,人们越来越重视精神上的需求,越来越多的人开始学习乐器来陶冶情操,在人们还未完全熟悉一首曲子的时候,人们在练习的过程中就需要对着乐谱来进行练习,而有的曲子有好几页乐谱,在练习完一页后,需要手动去翻到下一页,既费时也影响了一首曲子弹奏的连续性;阅读书籍也同样是满足人们精神需求的一种方式,但读完一页纸质的书籍后就需要用手来翻到下一页来进行阅读,而一些手部伤残的人并不容易翻动书页,因此影响到他们进行阅读。目前还没有解决上述问题的有效方法。
3.本实用新型就是基于上述情况作出的。
技术实现要素:
4.本实用新型克服了现有技术的不足,提供了一种能不用手就能进行书籍翻页的自动翻页机器人。
5.本实用新型是通过以下技术方案实现的:
6.一种自动翻页机器人,包括用于翻动书页的翻页臂、用于驱动翻页臂往下摆动进而使翻页臂压在书页上的第一驱动装置、当翻页臂压在书页上时驱动翻页臂往左摆动进行翻页动作的第二驱动装置、用于将翻页机器人固定在书本旁的安装座、用于发送“翻页”信号的信号发送装置以及接收“翻页”信号并控制第一驱动装置和第二驱动装置启停的控制器,所述翻页臂、第一驱动装置以及第二驱动装置直接或间接地安装在安装座上。
7.上述第一驱动装置包括第一电机、传动件以及连接第一电机与传动件并使传动件转动的第一传动机构,所述第二驱动装置安装在传动件上。
8.上述第一传动机构包括安装在第一电机输出轴上的第一传动齿轮以及与第一传动齿轮啮合的第二传动齿轮,传动件固定设置在第二传动齿轮上。
9.上述第二驱动装置包括第二电机以及连接第二电机与翻页臂的第二传动机构。
10.上述第二传动机构包括安装在第二电机输出轴上的第三传动齿轮以及与第三传动齿轮啮合的第四传动齿轮,所述翻页臂安装在第四传动齿轮上并随着第四传动齿轮的转动而摆动。
11.上述安装座包括用来安装第一驱动装置的第一安装板、用于将安装座安装在书本旁的第二安装板以及设在第一安装板与第二安装板之间用于调节第一安装板和第二安装板的安装位置的位置调节机构。
12.上述位置调节机构包括第一连接杆和第二连接杆,所述第一连接杆的一端与第二连接杆铰接,另一端安装在第一安装板上,所述第二连接杆一端与第一连接杆铰接,另一端与第二安装板铰接。
13.上述翻页臂远离第二驱动装置的一端上设有加大摩擦力的胶套。
14.上述信号发送装置包括脚踏开关。
15.上述信号发送装置包括声控开关。
16.与现有技术相比,本实用新型有如下优点:
17.1、通过信号发送装置来发送“翻页”信号给控制器,进而控制第一驱动装置与第二驱动装置驱动翻页臂按压在书页上并往左摆动来翻动书页,本翻页机器人通过模拟人们用手进行翻页的动作,使得人们不用通过手来进行翻页,从而让人们可以腾出手来进行其他的操作。
18.2、信号发送装置可以是脚踏开关或声控开关,当信号发送装置是脚踏开关时,只需用脚踩一下就能进行翻页,进而不用用手去进行翻页;当信号发送装置是声控开关时,只需发出声音信号就能进行翻页,非常方便快捷。
19.3、本装置由简单的部件组合而成且部件的数量并不多、结构简单、容易生产且生产的成本低。
20.4、安装座上设有位置调节机构,能根据放置书本的案板和书本的厚度来调节第一安装板和第二安装板的安装位置,使第一安装板位于书本的旁边且不低于于书本页面的高度,使翻页机器人更好地进行翻页。
21.5、翻页臂上设有胶套,在加大摩擦力使翻页臂更顺利地翻动书页的同时也能起到一定的防止翻页臂刮坏书本的作用。
附图说明
22.下面结合附图对本实用新型的具体实施方式作进一步详细说明,其中:
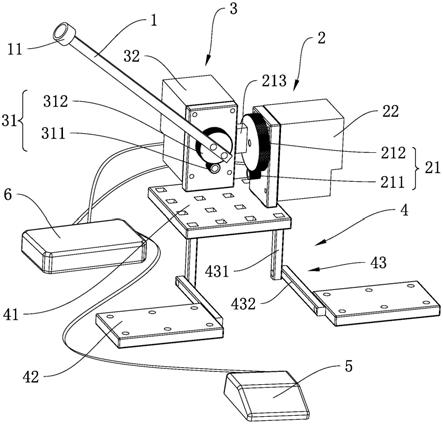
23.图1是本实用新型的结构示意图;
24.图2是第一驱动装置控制翻页臂往下转动后的示意图;
25.图3是第二驱动装置控制翻页臂往左摆动翻页后的示意图;
26.图4是第二传动齿轮上设有安装块的结构示意图。
具体实施方式
27.下面将结合附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
28.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
…
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.实施例1:
30.如图1至图4所示的一种自动翻页机器人,包括用于翻动书页的翻页臂1、用于驱动翻页臂1往下摆动进而使翻页臂1压在书页上的第一驱动装置2、当翻页臂1压在书页上时驱动翻页臂1往左摆动进行翻页动作的第二驱动装置3、用于将翻页机器人固定在书本旁的安装座4、用于发送“翻页”信号的信号发送装置5以及接收“翻页”信号并控制第一驱动装置2和第二驱动装置3启停的控制器6,所述翻页臂1、第一驱动装置2以及第二驱动装置3直接或间接地安装在安装座4上。
31.上述信号发送装置5为脚踏开关。
32.将翻页机器人通过安装座4固定在书本的旁边,当需要进行翻页的时候,只需通过
脚来踩踏脚踏开关,就能将“翻页”信号传递给控制器6,控制器6接收到“翻页”信号后就会控制第一驱动装置2驱动翻页臂1往下摆动按压在书页上,这时再控制第二驱动装置3驱动翻页臂1往左摆动,通过翻页臂1对书页的摩擦力来带动书页进行翻页,然后再通过第一驱动装置2和第二驱动装置3驱动翻页臂1往上转动和往右摆进行复位,无需用手来进行翻动书页从而解放了双手。
33.上述控制器6内设有为翻页机器人供电的电源。
34.安装座4包括用来安装第一驱动装置2的第一安装板41、用于将安装座4安装在书本旁的第二安装板42以及设在第一安装板41与第二安装板42之间用于调节第一安装板41和第二安装板42的安装角度的位置调节机构43。
35.位置调节机构43包括第一连接杆431和第二连接杆432,所述第一连接杆431的一端与第二连接杆432铰接,另一端安装在第一安装板41上,所述第二连接杆432一端与第一连接杆431铰接,另一端与第二安装板42铰接。
36.通过第二安装板42将翻页机器人安装在桌子或者乐谱架上,书籍放置在翻页机构的前方,桌子或者乐谱架上安装翻页机器人的安装面并不一定是平面,当安装面是斜面的时候,位置调节机构43能起到防止书本滑落的作用,同时不同的书本厚度是不一样的,通过位置调节机构43使第一安装板41位于书本的旁边且不低于于书本的页面高度,使翻页臂1高于书本书页的高度让翻页臂1能顺利进行翻页。
37.第一驱动装置2包括第一电机22、传动件213以及连接第一电机22与传动件213并使传动件213跟随第一电机22输出轴转动的第一传动机构21,所述第二驱动装置3安装在传动件213上并跟随传动件213的转动而转动。
38.第一传动机构21包括安装在第一电机22输出轴上的第一传动齿轮211以及与第一传动齿轮211啮合的第二传动齿轮212,传动件213固定设置在第二传动齿轮212上。
39.第二驱动装置3包括第二电机32以及连接第二电机32与翻页臂1的第二传动机构31。
40.第二传动机构31包括安装在第二电机32输出轴上的第三传动齿轮311以及与第三传动齿轮311啮合的第四传动齿轮312,所述翻页臂1安装在第四传动齿轮312上并随着第四传动齿轮312的转动而摆动。
41.当控制器6接收到“翻页”信号后,就会控制第一电机22工作进而使第一传动齿轮211转动,而第二传动齿轮212与第一传动齿轮211啮合所以第二传动齿轮212也会跟随第一传动齿轮211转动,而第二驱动装置3通过传动件213安装在第二传动齿轮212上,所以第二驱动装置3会随着第二传动齿轮212的转动而摆动,而翻页臂1通过第四传动齿轮312安装在第二驱动装置3上,所以翻页臂1也会跟随第二驱动装置3摆动而按压在书页上,这时控制器6又会控制第二电机32工作使第三传动齿轮311转动,而第四传动齿轮312与第三传动齿轮311啮合所以第四传动齿轮312也会跟随第三传动齿轮311转动,而翻页臂1安装在第四传动齿轮312上,所以翻页臂1会随着第四传动齿轮312的转动而进行摆动从而翻动书页,然后控制器6又会控制第一电机21反向转动和控制第二电机31反向转动进而实现翻页臂1复位。
42.翻页臂1远离第二驱动装置3的一端上设有加大摩擦力并防止翻页臂1刮坏书本的胶套12。
43.实施例2:
44.实施例2与实施例1相比,不同之处在于:
45.所述信号发送装置5为声控开关。
46.只需通过声音信号来实现声控开关的闭合,就能将“翻页”信号传递给控制器6,控制器6接收到“翻页”信号后就能控制第一驱动装置2使翻页臂1往下摆动按压在书页上,这时再控制第二驱动装置3使翻页臂1往左摆动通过翻页臂对书页的摩擦力来带动书页进行翻页,然后再通过第一驱动装置2和第二驱动装置3使翻页臂1往上转动和往右摆进行复位,只需发出声音信号就能控制翻页机器人翻页,无需通过肢体来按压控制开关来使翻页机器人翻页,非常方便快捷,就算是四肢残疾的人也能通过翻页机器人进行正常的阅读和翻页。
47.显然,本实用新型的上述实施例仅仅是为了清楚说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1