一种用于机动车培训的智能驾考系统的制作方法
1.本实用新型涉及机动车智能驾考技术领域,尤其涉及一种用于机动车培训的智能驾考系统。
背景技术:
2.随着我国经济的高速发展,汽车的销量不断攀升,家庭收入的不断提高,越来越多的人购买私家车,因此学车的人会越来越多,使得驾车驾驶培训行业得到了迅猛发展,面对日益“井喷”的拥有汽车驾驶证的人数,给驾校培训机构提出了巨大的服务挑战,其中高效培训、安全培训、智能培训成为重点关注的问题之一。
3.随着社会的不断发展,推出了驾校考试的智能驾考系统,采用检测终端对学员的身份、车速和训练时长进行检测,并将检测的信息发送至驾校数据服务器,来实现智能驾考,但是,不具备行车环境和车载状态感知系统,无法应对突发行车状况,较难保证培训的行驶安全,较难实现行车考试的无人监考化,培训或考试效率低下。
4.中国专利申请号:cn201410210094.5公开了一种机动车驾驶人培训智能机器人系统,通过行业监管平台、公共服务平台以及培训智能机器人的无线网络进行数据交互,实现对驾培行业的监管、在线审批、智能教学、模拟考试和过程分析,但是,该系统仅具备培训智能机器人的位姿信息感知能力,无行车环境感知能力及车载状态感知能力,仅由公共服务平台负责车辆及驾驶员安全,安全监控措施薄弱,较难实现无人监考化行车考试及培训,而且,通信方法采用自上而下的串联单通道通信方式,容易引起信息传输拥挤、堵塞、延迟,易因单线路故障导致系统整体瘫痪,易发生人员或车辆安全事故,存在着不足。
5.综上所述,针对现有技术中存在的缺陷,特别需要一种用于机动车培训的智能驾考系统,以解决现有技术的不足。
技术实现要素:
6.本实用新型的目的是提供一种用于机动车培训的智能驾考系统,设计新颖,采用多通道平行收发通信模式,实现对驾驶考试科学、规范、有序、自主、安全的实施、评判及记录。
7.本实用新型为解决其技术问题所采用的技术方案是:
8.一种用于机动车培训的智能驾考系统,包括:云端服务器、智能驾驶机器人;
9.智能驾驶机器人;智能驾驶机器人的内部安装有车况感知模块,智能驾驶机器人的上方安装有环境感知模块;
10.车况感知模块,车况感知模块包含有获取智能驾驶机器人状态信息的传感部件,车况感知模块通过无线网络模块将车况信息传输至云端服务器;
11.环境感知模块,环境感知模块包含有获取行车时的路况位置信息的监控部件,环境感知模块通过无线网络模块将路况环境信息传输至云端服务器;
12.智能驾驶机器人的驾驶位置前方安装有驾驶员客户端,云端服务器通过无线网络
模块连接有教练员客户端,驾驶员客户端和教练员客户端通过无线网络模块进行通信;
13.智能驾驶机器人、车况感知模块、驾驶员客户端、教练员客户端、环境感知模块均采用以云端服务器为中心的多通道并行的通信连接。
14.进一步,所述传感部件包含有辅助刹车装置、安全带报警开关、车门限位开关、档位传感器、车载控制器,辅助刹车装置安装于智能驾驶机器人的刹车装置,安全带报警开关安装于智能驾驶机器人的安全带装置,车门限位开关安装于智能驾驶机器人的车门,档位传感器安装于智能驾驶机器人的档位装置,车载控制器安装于智能驾驶机器人后备箱,车载控制器的一个端口与驾驶员客户端总线通信,车载控制器的另一个端口与环境感知模块总线通信。
15.进一步,所述监控部件包含有探头、无线网络天线、定位系统,探头分均安装于智能驾驶机器人的四周,无线网络天线、定位系统分别安装于智能驾驶机器人的顶部。
16.进一步,所述定位系统采用双天线rtk-gps系统,探头采用超声波探头。
17.进一步,所述无线网络模块采用wifi、4g通信技术、5g通信中的任意一种。
18.进一步,总线通信形式采用can、i2c、spi、rs485、rs232中的任意一种。
19.进一步,驾驶员客户端包括指纹采集器、身份阅读器、车载摄像头、平板电脑,隔离电源、type-c扩展坞及usb-can转换器,指纹采集器、身份阅读器、平板电脑、隔离电源、type-c扩展坞及usb-can转换器均设置于智能驾驶机器人的驾驶室前端,车载摄像头设置于智能驾驶机器人的驾驶室顶部,指纹采集器、身份阅读器、隔离电源及usb-can转换器通过type-c扩展坞分别于平板电脑连接。
20.进一步,所述教练员客户端采用ipad。
21.进一步,智能驾驶机器人为四座考试机动车。
22.本实用新型的优点在于:
23.本实用新型采用云端服务器、智能驾驶机器人、驾驶员客户端、教练员客户端、车况感知模块、环境感知模块相互协调配合,通过对行驶环境感知、行驶状态感知、驾驶人员感知,无需人工同车监考,实现了无监考化、自主化、多车同步安全考试。
24.本实用新型采用多通道平行收发通信模式,可避免传统自上而下串联单通道通信方式引起的信息传输拥挤、堵塞、延迟,易因单线路故障导致系统整体瘫痪等问题,具有高效传输、稳定传输、低故障率等优势。
25.本实用新型采用车况感知模块、环境感知模块、云端服务器和教练员客户端同步并行感知驾驶员及车辆情况,具备人工调控、传感器调控、云端网络调控多重外部监测模式,可避免因驾驶员误操作、行驶环境异常、驾驶参数异常等突发状况引起的行车考试事故,进一步保证考试人员的安全驾驶。
26.本实用新型采用云端服务器实时记录考试结果、驾驶员信息、驾驶员状态、驾驶环境状态及智能驾驶机器人状态,通过数据分析,精确评判考生驾驶机动车的真实能力,提供合理的训练提升意见。
附图说明
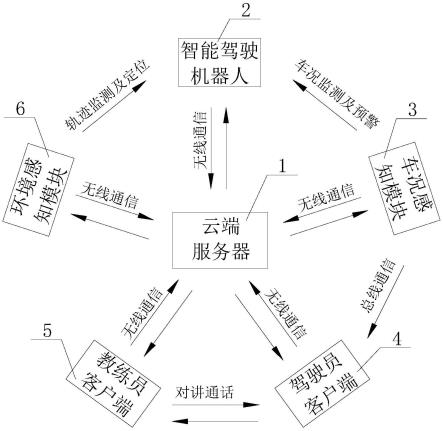
27.图1为本实用新型智能驾考系统的原理图;
28.图2为本实用新型智能驾考系统的结构示意图;
29.图3为本实用新型驾驶员客户端的连接示意图;
30.图4为本实用新型智能驾考方法的流程图;
31.1-云端服务器,2-智能驾驶机器人,3-车况感知模块,4-驾驶员客户端,5-教练员客户端,6-环境感知模块,31-辅助刹车装置,32-安全带报警开关,33-车门限位开关,34-档位传感器,35-车载控制器,41-指纹采集器,42-身份阅读器,43-平板电脑,44-车载摄像头,45-隔离电源,46-type-c扩展坞,47-usb-can转换器,61-超声波探头,62-无线网络天线,63-双天线rtk-gps系统。
具体实施方式
32.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本实用新型。
33.如图1、图2、图3、图4所示,一种用于机动车培训的智能驾考系统,包括云端服务器1、智能驾驶机器人2、车况感知模块3、驾驶员客户端4、教练员客户端5和环境感知模块6,智能驾驶机器人2、车况感知模块3、驾驶员客户端4、教练员客户端5、环境感知模块6采用以云端服务器1为中心的多通道并行无线通信连接,记录驾驶员信息、驾驶环境信息、智能驾驶机器人状态信息及考试信息,车况感知模块3向云端服务器1上传智能驾驶机器人2状态。环境感知模块6向云端服务器1上传驾驶环境状态。驾驶员客户端4向云端服务器1上传驾驶人个人信息及驾驶员状态,云端服务器1向驾驶员客户端4下发考试指令,教练员客户端5向云端服务器1上传考试信息,云端服务器1向教练员客户端5下发驾驶员状态、驾驶环境状态及智能驾驶机器人2状态,云端服务器1向智能驾驶机器人2下发停车制动指令。
34.云端服务器1为内置服务器软件平台的服务硬件系统,服务器软件平台基于windows操作系统开发,结合数据库技术具备驾驶人状态显示及保存、驾驶人信息记录及管理、考试日志记录及查询、行驶轨迹显示及存档功能。
35.智能驾驶机器人2为《机动车驾驶人考试内容和方法》规定的四座考试机动车。
36.车况感知模块3包括辅助刹车装置31、安全带报警开关32、车门限位开关33、档位传感器34及内置车载控制软件的车载控制器35,辅助刹车装置31安装于智能驾驶机器人2刹车装置处,用于执行云端服务器1下发的刹车制动任务,安全带报警开关32安装于智能驾驶机器人2的安全带装置处,用于监测安全带状态,车门限位开关33安装于智能驾驶机器人2的车门处,用于监测车门状态,档位传感器34安装于智能驾驶机器人2的档位装置处,用于监测档位状态,车载控制器35安装于智能驾驶机器人2后备箱,用于采集状态信息、驱动刹车和预警、与驾驶员客户端4总线通信及与环境感知模块6总线通信,车载控制软件开发基于arm架构微处理器,使用keil uvision4平台进行开发,具备安全带、车门锁、档位、gps定位数据通信及采集,发动机启停控制、电子围栏报警、超速限制与报警、前后遇障物辅助刹车、发动机转速限制功能,总线通信形式采用can、i2c、spi、rs485、rs232中任一种。
37.驾驶员客户端4包括指纹采集器41、身份阅读器42、车载摄像头44、内置驾驶员软件平台的平板电脑43及驾驶员移动客户端软件平台、隔离电源45、type-c扩展坞46及usb-can转换器47,指纹采集器41、身份阅读器42、平板电脑43、隔离电源45、type-c扩展坞46及usb-can转换器47均设置于智能驾驶机器人2驾驶室前端,并在驾驶员操作范围内,车载摄像头44设置于智能驾驶机器人2顶部,驾驶员在车载摄像头44视场范围内,指纹采集器41、
身份阅读器42、隔离电源45及usb-can转换器47通过type-c扩展坞46与平板电脑43连接,驾驶员软件平台开发基于android操作系统,使用android studio平台开发,具备双向语言通话、身份识别与登录、数据无线传输、行驶状态显示、在考项目信息与状态显示、视频演示教学、实时评判、提供训练指令、生成成长曲线、自动关机功能,驾驶员移动客户端软件平台开发基于android操作系统,使用android studio平台开发,具备身份注册、模拟考试预约、记录学员特征、学时、项目正确率、教学日志及教学内容预习功能。
38.教练员客户端5内部设置教练员软件平台,软件开发基于android操作系统,使用android studio平台进行开发,具备车内监控显示、在考项目信息与状态显示、双向语言通话、考试结果查询、操作日志查询、学员能力评估、学员审批与预约、远程结束训练功能。
39.环境感知模块6包括超声波探头61、无线网络天线62、双天线rtk-gps系统63,多个超声波探头61均布安装于车身四周,无线网络天线62、双天线rtk-gps系统63安装于智能驾驶机器人2顶部,超声波探头61感知智能驾驶机器人2周围障碍物信息,双天线rtk-gps系统63实时获取智能驾驶机器人2定位信息,无线通信形式采用wifi、4g通信技术、5g通信技术中任一种,定位系统采用双天线rtk-gps系统,探头采用超声波探头。
40.本实用新型的使用步骤如下:
41.s1、开始。启动云端服务器、智能驾驶机器人、车况感知模块、驾驶员客户端、教练员客户端和环境感知模块。
42.s2、建立通信连接。开启无线通信设备,将智能驾驶机器人、车况感知模块、驾驶员客户端、教练员客户端和环境感知模块与云端服务器连接,车况感知模块、环境感知模块、驾驶员客户端建立总线通信。
43.s3、身份及科目校验。考试人员个人信息校验,考试科目确认。
44.s4、初始状态获取。获取当前环境状态、车载状态及教练状态。
45.s5、行车状态判断。若环境状态、车载状态、教练员满足考试行车要求,开始考试;若不满足考试要求,刹车制动,结束考试。
46.s6、实时状态监测。若初始状态满足考试行车要求进入考试进程,实时监测环境状态、车载状态及教练状态。
47.s7、行车状态判断。若状态满足考试行车要求,进入考试进程状态判断;若状态不满足考试行车要求,刹车制动,结束考试。
48.s8、考试进程状态判断。若考试进程状态为未完成考试,循环s6-s8;若考试进程状态为完成考试,刹车制动,结束考试。
49.本实用新型提出的智能驾考系统,由驾驶员客户端向云端服务器上传个人信息并确定考试信息,云端服务器下发考试任务。考试过程中,车况感知模块和环境感知模块实时感知智能驾驶机器人周围情况、轨迹情况及系统自身行驶情况,实时反馈云端服务器。云端服务器根据反馈的情况数据实现个人信息记录、考试成绩记录、驾驶环境及人员监控、突发情况制动停车、学员成绩分析。教练员客户端通过无线通信可远程同步监控及语言通话,强制制动停车结束考试,安全性能优。
50.以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让本领域的技术人员了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1