固定翼无人机操控实训仪的制作方法
:
1.本实用新型涉及一种固定翼无人机操控实训仪,属于无人机教学领域。
背景技术:
2.在开展固定翼无人机教学时,目前针对飞行前关于固定翼机载设备的组装调试以及固定翼无人机的操控调试等内容教学,只能使用真实的固定翼无人机开展教学,由于真实固定翼无人机的体积过大,单架飞机结构布局单一,通用性差等原因,导致在教学中需要较大空间;真实无人机的组装与操控需要涉及多种设备与工具,将导致教学环境混乱;在教学过程中机载设备连接线路复杂;机载设备不能重复安装使用;多种固定翼布局需要大量不同的飞机才能满足教学的需要等突出问题。
技术实现要素:
3.本实用新型的目的在于提供一种通用性强,单台设备即可满足多种固定翼布局教学的固定翼无人机操控实训仪。
4.本实用新型由如下技术方案实施:固定翼无人机操控实训仪,其包括箱体和设置在所述箱体上的箱盖,所述箱体内设有实训面板、姿态控制平台、固定翼教学平台;
5.在所述箱体顶部设有所述实训面板,所述实训面板上设有电源接口、电源保险、安全开关、伺服机构控制信号发生器、自动控制与手动控制转换开关等部件;所述电源接口与所述实训面板下设的开关电源输入端连接,所述开关电源的输出端与实训仪直流输入接口连接;
6.在所述箱体底部设有所述姿态控制平台,所述姿态控制平台包括俯仰伺服机构、横滚伺服机构、偏航伺服电机、支撑结构;所述支撑结构包括竖直立杆和设置在所述立杆上的球节;所述偏航伺服电机的电机轴竖直设置,在所述偏航伺服电机的电机轴上同轴固定设有所述立杆;在所述偏航伺服电机侧部分别设有所述俯仰伺服机构和所述横滚伺服机构,所述俯仰伺服机构包括俯仰伺服电机、俯仰摇摆臂和俯仰传动臂,在所述俯仰伺服电机的输出轴上设有所述俯仰摇摆臂,在所述俯仰摇摆臂上铰接设有所述俯仰传动臂;所述横滚伺服机构包括横滚伺服电机、横滚摇摆臂和横滚传动臂,在所述横滚伺服电机的输出轴上设有所述横滚摇摆臂,在所述横滚摇摆臂上铰接设有所述横滚传动臂;
7.在所述姿态控制平台的所述球节的快装板上固定设有所述固定翼教学平台的所述机身pcb板,所述俯仰传动臂顶端与所述机身pcb板铰接,所述横滚传动臂的顶端与所述机身pcb板铰接;在所述机身pcb板头部设有电机,在所述机身pcb板尾部设置有一个以上的尾翼电气连接排针;在所述机身pcb板上设有与所述偏航伺服电机电连接的偏航电气连接口、与所述俯仰伺服电机电连接的俯仰电气连接接口、与所述横滚伺服电机电连接的横滚电气连接接口、与飞控装置电连接的飞控电气连接接口、与所述电机电连接的电机电气连接接口;
8.在所述机身pcb板顶部板面固定设有飞控减震平台,所述飞控减震平台包括飞控
装置,所述飞控装置通过所述飞控电气连接接口与所述机身pcb板电连接。
9.优选的,所述机身pcb板整体为固定翼无人机的投影外形。
10.优选的,在所述机身pcb板的尾部中心竖直设有竖直尾翼电气连接排针,在所述竖直尾翼电气连接排针上分体插接有竖直尾翼pcb板;在所述竖直尾翼电气连接排针两侧的所述机身pcb板上分别设有水平设置的水平尾翼电气连接排针和向上倾斜设置的v形尾翼电气连接排针,在所述水平尾翼电气连接排针上分体插接有水平尾翼pcb板,在所述v形尾翼电气连接排针上分体插接有v形尾翼pcb板。
11.优选的,所述飞控减震平台还包括飞控固定板、在所述飞控固定板底部均匀分布设置的四个减震支腿,所述飞控减震平台通过四个所述减震支腿固定在所述机身pcb板顶部板面上,所述飞控固定板与所述机身pcb板平行设置;在所述飞控固定板顶面分体固定设有所述飞控装置。
12.优选的,所述箱体内设有模拟伞舱与设备仓。
13.本实用新型的优点:尾翼通过插接方式固定在机身pcb板上,可实现常规、飞翼、v尾等多种固定翼布局;平台通用性强,单台设备即可满足多种固定翼布局的教学。所有教学设备通过接口插接,保证各设备的连接稳定和正确,应用于教学中更有效率。集成度高,可快速掌握无人机的飞行控制原理。设备通用性强,可搭载多种无人机飞行控制系统(兼容市面上所有的固定翼控制系统)。设备占用空间小,适合学校或培训机构多人次的教学使用。
附图说明:
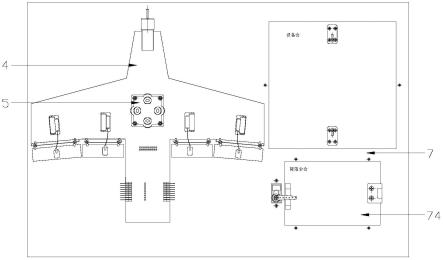
14.图1为本实用新型的整体示意图。
15.图2为图1的仰视图。
16.图3为姿态控制平台的主视图。
17.图4为姿态控制平台的侧视图。
18.图5为机身pcb板的主视图。
19.图6为机身pcb板的俯视图。
20.图7为常规固定翼布局的机身pcb板俯视图。
21.图8为v尾固定翼布局的机身pcb板主视图。
22.图9为v尾固定翼布局的机身pcb板俯视图。
具体实施方式:
23.实施例:如图1-图9所示的固定翼无人机操控实训仪,其包括箱体1和设置在箱体1上的箱盖(图中未示出)。
24.在箱体1内设有实训面板7,实训面板7上设有电源分配接口71、安全开关72、电源保险73、模拟伞舱74、伺服机构控制信号发生器75、自动控制与手动控制转换开关76;安全开关72控制整个装置的电路通断,电源分配接口71与所述实训面板7下设的开关电源输入端连接,开关电源的输出端与实训仪直流输入接口连接。
25.在箱体1底部设有姿态控制平台3,姿态控制平台3包括偏航伺服电机31、俯仰伺服机构32、横滚伺服机构33、立杆34和球节35;偏航伺服电机31的电机轴竖直设置,在偏航伺服电机31的电机轴上同轴固定设有立杆34,在立杆34顶端设有球节35;在偏航伺服电机31
侧部分别设有俯仰伺服机构32和横滚伺服机构33,俯仰伺服机构32包括俯仰伺服电机321、俯仰摇摆臂322和俯仰传动臂323,在俯仰伺服电机321的输出轴上设有俯仰摇摆臂322,在俯仰摇摆臂322上铰接设有俯仰传动臂323;横滚伺服机构33包括横滚伺服电机331、横滚摇摆臂332和横滚传动臂333,在横滚伺服电机331的输出轴上设有横滚摇摆臂332,在横滚摇摆臂332上铰接设有横滚传动臂333。
26.机身pcb板4固定设在球节35的快装板351上,整体形状为固定翼无人机的投影外形;俯仰传动臂323顶端与pcb板4铰接,俯仰传动臂323置于机身pcb板4的12点方向或6点方向,在本实施例中,俯仰传动臂323置于机身pcb板4的12点方向;横滚传动臂333的顶端与pcb板4铰接,横滚传动臂333置于机身pcb板4的3点方向或9点方向,在本实施例中,横滚传动臂333置于机身pcb板4的3点方向。
27.机身pcb板4上设有与偏航伺服电机31电连接的偏航电气连接接口408、与俯仰伺服电机321电连接的俯仰电气连接接口409、与横滚伺服电机331电连接的横滚电气连接接口410、通过偏航伺服电机31的转动带动机身pcb板4进行偏航动;通过俯仰伺服电机321的转动带动机身pcb板4进行仰俯动作;通过横滚伺服电机331的转动带动机身pcb板4进行横滚动作。
28.在机身pcb板4头部通过电机电气连接接口412连接有电机401;在机身pcb板4尾部中心设有竖直设置的竖直尾翼电气连接排针402,在竖直尾翼电气连接排针402上分体插接有竖直尾翼pcb板403;在竖直尾翼电气连接排针402两侧的机身pcb板4上分别设有水平设置的水平尾翼电气连接排针404和向上倾斜设置的v形尾翼电气连接排针405,在水平尾翼电气连接排针404上分体插接有水平尾翼pcb板406,在v形尾翼电气连接排针405上分体插接有v形尾翼pcb板407;通过在竖直尾翼电气连接排针402上插接竖直尾翼pcb板403,在水平尾翼电气连接排针404上插接水平尾翼pcb板406,实现模拟常规固定翼布局;通过在v形尾翼电气连接排针405上插接v形尾翼pcb板407,实现模拟v尾固定翼布局。
29.在机身pcb板4顶部板面固定设有飞控减震平台5以减小无人机工作过程中的抖动,飞控减震平台5包括飞控装置6,飞控装置6通过飞控电气连接接口411与机身pcb板4电连接;飞控减震平台5还包括飞控固定板51、在飞控固定板51底部均匀分布设有四个减震支腿52,飞控减震平台5通过四个减震支腿52固定在机身pcb板4顶部板面上,飞控固定板51与机身pcb板4平行设置;飞控装置6分体固定在飞控固定板51顶面。
30.当伺服机构处于自动工作状态时,通过飞控装置6发送信号控制偏航伺服电机31、俯仰伺服电机321、横滚伺服电机331动作,使机身pcb板4进行相应的偏航、俯仰、横滚动作;控制电机401进行正反转;控制机身pcb板4上的副翼舵机413、襟翼舵机414动作,带动机身pcb板4机翼上铰接的相应副翼415、襟翼416动作;在常规固定翼布局中控制竖直尾翼pcb板403上的方向舵舵机417动作,带动竖直尾翼pcb板403上铰接方向舵418动作;控制水平尾翼pcb板406上的升降舵舵机419动作,带动水平尾翼pcb板406上铰接的升降舵420动作;在v尾固定翼布局中控制v形尾翼pcb板407上的尾舵舵机421动作,带动v形尾翼pcb板407上铰接的尾舵422动作。
31.工作原理:
32.在机身pcb板4尾部的不同尾翼电气连接排针上插接相应尾翼pcb板即可实现对不同机翼无人机的模拟;接通实训面板7上的电源分配接口71并闭合安全开关72,固定翼无人
机操控实训仪开始工作。
33.转换自动控制与手动控制转换开关76可以实现对无人机运动姿态的自动控制或手动控制,可控制的运动状态包括偏航、俯仰、横滚;当开关处于手动控制状态时,手动拉杆控制信息传输到伺服机构控制信号发生器75,进一步控制姿态控制平台3的偏航伺服电机31、俯仰伺服机构32、横滚伺服机构33,对无人机姿态进行调整;当开关处于自动控制状态时,飞控装置6自动控制无人机的运动姿态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1