一种无人机电子战仿真效能支撑系统及方法
1.本发明涉及无人机技术领域,具体为一种无人机电子战仿真效能支撑系统及方法。
背景技术:
2.无人驾驶飞机简称无人机,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机加行业应用,而无人机电子战仿真指的是军用的无人机,其中,无人机在抗效能研究的仿真试验,为电子对抗体系对抗论证评估、试验、训练等提供支撑,电子对抗系统效能仿真就是其中重要的组成内容,由于在对多种于电子对抗的发展,电子对抗领域对仿直实现和应用提出了更高更广的应用需求,不仅要满足单武器装备的论证、调试、测试训练和教学,而且要能支撑由多平台,最后由于无人机只能起到简单的侦察,并且无人机在侦察的过程中可能因检察拍摄不理想造成拍摄的不稳定。
3.为了增强仿真效能支撑对多平台的安装,减少无人机电子战仿真效能支撑多平台的搭载的多功能,而解决多平台的搭载的过程中的侦察,是解决无人机多平台搭载的重要办法,以便增强无人机的多功能,并且无人机在侦察的过程中可能因检察拍摄不理想造成拍摄的不稳定,且无人机不具备防护或者武力的功能,基于上述问题,我们提出了一种无人机电子战仿真效能支撑系统。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种无人机电子战仿真效能支撑系统,解决无人机多平台搭载的重要办法,以便增强无人机的多功能,并且无人机在侦察的过程中可能因检察拍摄不理想造成拍摄的不稳定,且无人机不具备防护或者武力的功能的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种无人机电子战仿真效能支撑系统,包括通信基站,所述通信基站上方设置有支撑搭载平台,所述支撑搭载平台上方设置有升空平台,所述支撑搭载平台左右两侧分别设置有武器干扰平台和拍摄平台,所述武器干扰平台下方设置有光伏发电平台,所述通信基站顶部固定连接有第一连接线,所述第一连接线末端固定连接有吊钩接收模块,所述吊钩接收模块顶部连接有支撑组件;
8.所述通信基站顶部固定连接有装配线,所述升空平台表面固定连接有飞控仿真系统,所述装配线末端与飞控仿真系统固定连接,所述飞控仿真系统顶部固定连接有第一支线,所述第一支线末端固定连接有升空组件;
9.所述通信基站顶部固定连接有第一安装线,所述第一安装线末端固定连接有太阳能电池组,所述太阳能电池组背面与光伏发电平台固定连接,所述太阳能电池组顶部连接
有光伏组件;
10.所述通信基站侧壁固定连接有第一固定线,所述第一固定线末端固定连接有仿真干扰系统,所述仿真干扰系统背面与武器干扰平台固定连接,所述仿真干扰系统顶部连接有武器干扰组件;
11.所述通信基站侧壁固定连接有第一传输线,所述第一传输线末端与相机控制模块,所述相机控制模块背面与拍摄平台固定连接,所述相机控制模块顶部连接有拍摄组件。
12.作为上述技术方案的进一步描述:
13.所述支撑组件包括与吊钩接收模块顶部固定连接的第二连接线,所述第二连接线末端固定连接有吊钩转换模块,所述吊钩转换模块顶部固定连接有第三连接线,所述第三连接线末端固定连接有吊钩处理模块,所述吊钩处理模块顶部固定连接有第四连接线,所述第四连接线末端固定连接有吊钩螺旋悬挂。
14.作为上述技术方案的进一步描述:
15.所述吊钩螺旋悬挂顶部固定连接有第一吊装线和第二吊装线,所述第一吊装线末端与光伏发电平台固定连接,所述第二吊装线末端与升空平台固定连接,所述吊钩螺旋悬挂外侧壁两侧分别固定连接有第三吊装线和第四吊装线,所述第三吊装线末端与武器干扰平台固定连接,所述第四吊装线末端与拍摄平台固定连接。
16.作为上述技术方案的进一步描述:
17.所述升空组件包括与第一支线末端固定连接的航行轨迹管理规划,所述航行轨迹管理规划顶部固定连接有第二支线,所述第二支线末端固定连接有cpu控制模块,所述cpu控制模块侧壁固定连接有第三支线,所述第三支线末端固定连接有无人机仪表显示模块,所述cpu控制模块顶部固定连接有第四支线,所述第四支线末端固定连接有自主导航模块。
18.作为上述技术方案的进一步描述:
19.所述光伏组件包括与太阳能电池组侧壁固定连接的第二安装线,所述第二安装线末端固定连接有配电控制器,所述配电控制器侧壁固定连接有第三安装线,所述第三安装线末端固定连接有光电接收器,所述光电接收器侧壁固定连接有第四安装线,所述第四安装线末端固定连接有太阳能蓄电池。
20.作为上述技术方案的进一步描述:
21.所述武器干扰组件包括与仿真干扰系统侧壁固定连接的第二固定线,所述第二固定线末端固定连接有信号接收模块,所述信号接收模块侧壁固定连接有第三固定线,所述第三固定线末端固定连接有信号转换模块,所述信号转换模块侧壁固定连接有第四固定线,所述第四固定线末端固定连接有信号cpu处理模块,所述信号cpu处理模块顶部固定连接有第一输送线,所述第一输送线末端固定连接有雷达定位系统,所述雷达定位系统侧壁固定连接有第二输送线。
22.作为上述技术方案的进一步描述:
23.所述第二输送线末端固定连接有无线干扰器,所述无线干扰器底部固定连接有第三输送线,所述第三输送线末端固定连接有光电干扰器,所述光电干扰器底部固定连接有第四输送线,所述第四输送线末端固定连接有干扰枪。
24.作为上述技术方案的进一步描述:
25.所述拍摄组件包括与相机控制模块侧壁固定连接的第二传输线,所述第二传输线
末端固定连接有图像接收模块,所述图像接收模块侧壁固定连接有第四传输线,所述第四传输线末端固定连接有图像分析模块。
26.作为上述技术方案的进一步描述:
27.所述图像分析模块侧壁固定连接有第一分析线,所述第一分析线末端固定连接有pc端,所述pc端侧壁固定连接有第二分析线,所述第二分析线末端固定连接有照片传输模块,所述照片传输模块侧壁固定连接有第三分析线,所述第三分析线末端固定连接有图像分析机,所述图像分析机底部固定连接有第四分析线,所述第四分析线末端固定连接有图像显示器。
28.一种无人机电子战仿真效能支撑方法,包括以下步骤:
29.s1、先启动通信基站,通过通信基站带动信号进入第一安装线,接着从第一安装线进入太阳能电池组,然后启动太阳能电池组将能源传输入第二安装线,接着从第二安装线传输入配电控制器,从而将电进行变频,调节调控的电排入第三安装线,接着传入入的电进入光电接收器接收调控的电,跟着电进入第四安装线,然后从第四安装线进入太阳能蓄电池内部蓄存,使得太阳能蓄电池经过外部的电线带动支撑组件、武器干扰平台和拍摄平台进行通电;
30.s2、接着启动通信基站,通过通信基站带动信号进入第一连接线,接着从第一连接线进入吊钩接收模块,使得接收的信号进入第二连接线,跟着从第二连接线传输入吊钩转换模块进行转换信息,然后转换的信号传输入第三连接线,跟着从第三连接线传输入吊钩处理模块,使得将转换的信号进行处理,接着处理的信号进入第四连接线,同时从第四连接线进入吊钩螺旋悬挂,然后从吊钩螺旋悬挂上的第一吊装线和第二吊装线分别对光伏发电平台和升空平台进行搭载装配,跟着吊钩螺旋悬挂上的第三吊装线和第四吊装线分别对武器干扰平台和拍摄平台进行搭载装配,从而对多个平台进行支撑安装;
31.s3、接着通信基站带动信号进入装配线,接着从装配线传输入飞控仿真系统,接着从飞控仿真系统传输入第一支线,接着从第一支线传输入航行轨迹管理规划,将信号进行规划控制,然后规划控制的信号传输入第二支线,接着将信号从第二支线传输入cpu控制模块,从而通过cpu控制模块对信号进行处理,接着处理的信号进入第三支线,然后从第三支线进入无人机仪表显示模块显示,跟着信号进入第四支线,然后从第四支线进入自主导航模块,从而带动外部的无人机自动巡航;
32.s4、然后通过通信基站再次将信号传输入第一固定线,接着从第一固定线进入仿真干扰系统,从而将干扰的信息传输入第二固定线,接着传输的信号进入信号接收模块,从而对信号进行接收,然后接收的信号进入第三固定线,接着接收的信号传输入信号转换模块,从而将信号进行转换,然后转换的信号进入第四固定线,然后从第四固定线进入信号cpu处理模块对转换的信号进行处理,接着处理的信号传输入第一输送线,跟着从第一输送线进入雷达定位系统接收定位信号,接着点位接收的信号进入第二输送线,然后从第二输送线进入无线干扰器,从带动干扰的信号进入第三输送线,跟着从第三输送线进入光电干扰器,然后从光电干扰器进入光感传输,接着光感传输的信号进入干扰枪,从而通过干扰枪对外部电子设备进行干扰;
33.s5、同时通信基站传输的信号进入第一传输线,跟着从第一传输线进入相机控制模块,然后从相机控制模块进入第二传输线,然后从第二传输线进入图像接收模块对信号
进行接收,然后接收的信号进入第四传输线,然后从第四传输线进入图像分析模块对信号进行分析,接着分析的信号进入第一分析线,然后从第一分析线进入pc端对接收的信号进行处理,跟着处理的信号进入第二分析线,然后从第二分析线进入照片传输模块,然后从照片传输模块进入第三分析线,然后从第三分析线进入图像分析机,从而进一步的对信号进行分析,然后分析的信号进入第四分析线,接着从第四分析线进入图像显示器进行显示。
34.(三)有益效果
35.本发明具有如下有益效果:
36.1、与现有技术相比,该一种无人机电子战仿真效能支撑系统,利用吊钩接收模块、第二连接线、吊钩转换模块、第三连接线、吊钩处理模块、第四连接线、吊钩螺旋悬挂、第一吊装线、第二吊装线、光伏发电平台、升空平台、第三吊装线、第四吊装线、武器干扰平台和拍摄平台配合,便于通过第一吊装线和第二吊装线分别对光伏发电平台升空平台进行安装搭载,且第三吊装线和第四吊装线分别对武器干扰平台和拍摄平台进行搭载装配,方便对多个平台进行支撑安装,使得对多种平台进行安装,并且搭载多种功能,提高使用效果。
37.2、与现有技术相比,该一种无人机电子战仿真效能支撑系统,利用仿真干扰系统、第二固定线、信号接收模块、第三固定线、信号转换模块、第四固定线、信号cpu处理模块、第一输送线、雷达定位系统、第二输送线、无线干扰器、第三输送线、光电干扰器、第四输送线和干扰枪配合,便于通过雷达定位系统对外部的信号进行点位,并且通过无线干扰器、光电干扰器和干扰枪,从而对外部的网络信号进行干扰。
38.3、与现有技术相比,该一种无人机电子战仿真效能支撑系统,利用相机控制模块、第二传输线、图像接收模块、图像分析模块、第四传输线、第一分析线、pc端、第二分析线、照片传输模块、第三分析线、图像分析机、第四分析线和图像显示器配合,便于通过相机控制模块将外部的信号进行拍摄,并且通过pc端处理,接着通过照片传输模块进行传输,然后通过图像分析机进行分析,接着通过图像显示器显示,方便对信号进行接收显示。
39.4、与现有技术相比,该一种无人机电子战仿真效能支撑系统,航行轨迹管理规划、第二支线、cpu控制模块、第三支线、无人机仪表显示模块、第四支线和自主导航模块配合,便于通过航行轨迹管理规划进行规划路线,接着通过cpu控制模块对规划的信号进行处理,然后分别对无人机仪表显示模块显示,同时规划的信号经过自主导航模块进行处理,使得无人机自动巡航。
40.5、与现有技术相比,该一种无人机电子战仿真效能支撑系统,利用太阳能电池组、第二安装线、配电控制器、光电接收器、第三安装线、第四安装线和太阳能蓄电池配合,便于通过太阳能蓄电池对太阳能进行光能转换,使得无人机可以无线续航。
附图说明
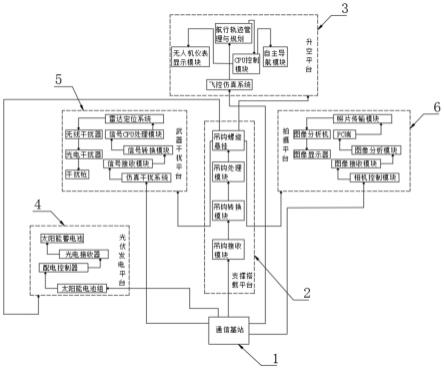
41.图1为本发明提出的一种无人机电子战仿真效能支撑系统整体结构示意图;
42.图2为本发明提出的一种无人机电子战仿真效能支撑系统的支撑搭载平台结构示意图;
43.图3为本发明提出的一种无人机电子战仿真效能支撑系统的升空平台结构示意图;
44.图4为本发明提出的一种无人机电子战仿真效能支撑系统的光伏发电平台结构示
意图;
45.图5为本发明提出的一种无人机电子战仿真效能支撑系统的武器干扰平台结构示意图;
46.图6为本发明提出的一种无人机电子战仿真效能支撑系统的无线干扰器和干扰枪结构示意图;
47.图7为本发明提出的一种无人机电子战仿真效能支撑系统的拍摄平台结构示意图。
48.图例说明:
49.1、通信基站;2、支撑搭载平台;3、升空平台;4、光伏发电平台;5、武器干扰平台;6、拍摄平台;7、吊钩接收模块;8、吊钩转换模块;9、吊钩处理模块;10、吊钩螺旋悬挂;11、飞控仿真系统;12、航行轨迹管理规划;13、cpu控制模块;14、无人机仪表显示模块;15、自主导航模块;16、太阳能电池组;17、配电控制器;18、光电接收器;19、太阳能蓄电池;20、仿真干扰系统;21、信号接收模块;22、信号转换模块;23、信号cpu处理模块;24、雷达定位系统;25、无线干扰器;26、光电干扰器;27、干扰枪;28、相机控制模块;29、图像接收模块;30、图像分析模块;31、pc端;32、照片传输模块;33、图像分析机;34、图像显示器。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.实施例:
52.如图1-7所示,本发明实施例提供一种无人机电子战仿真效能支撑系统,包括通信基站1,通信基站1上方设置有支撑搭载平台2,支撑搭载平台2上方设置有升空平台3,支撑搭载平台2左右两侧分别设置有武器干扰平台5和拍摄平台6,武器干扰平台5下方设置有光伏发电平台4,通信基站1顶部固定连接有第一连接线,第一连接线末端固定连接有吊钩接收模块7,吊钩接收模块7顶部连接有支撑组件。通过支撑组件起到对升空平台3、光伏发电平台4、武器干扰平台5和拍摄平台6进行搭载,如图2所示,支撑组件包括与吊钩接收模块7顶部固定连接的第二连接线,第二连接线末端固定连接有吊钩转换模块8,吊钩转换模块8顶部固定连接有第三连接线,第三连接线末端固定连接有吊钩处理模块9,吊钩处理模块9顶部固定连接有第四连接线,第四连接线末端固定连接有吊钩螺旋悬挂10,吊钩螺旋悬挂10顶部固定连接有第一吊装线和第二吊装线,第一吊装线末端与光伏发电平台4固定连接,第二吊装线末端与升空平台3固定连接,吊钩螺旋悬挂10外侧壁两侧分别固定连接有第三吊装线和第四吊装线,第三吊装线末端与武器干扰平台5固定连接,第四吊装线末端与拍摄平台6固定连接,通过吊钩螺旋悬挂10分别对光伏发电平台4、武器干扰平台5、升空平台3和拍摄平台6进行搭载。
53.通信基站1顶部固定连接有装配线,升空平台3表面固定连接有飞控仿真系统11,装配线末端与飞控仿真系统11固定连接,飞控仿真系统11顶部固定连接有第一支线,第一支线末端固定连接有升空组件,如图3所示,升空组件包括与第一支线末端固定连接的航行
轨迹管理规划12,航行轨迹管理规划12顶部固定连接有第二支线,第二支线末端固定连接有cpu控制模块13,cpu控制模块13侧壁固定连接有第三支线,第三支线末端固定连接有无人机仪表显示模块14,cpu控制模块13顶部固定连接有第四支线,第四支线末端固定连接有自主导航模块15,通过升空组件起到对无人机进行移动导航的作用。
54.通信基站1顶部固定连接有第一安装线,第一安装线末端固定连接有太阳能电池组16,太阳能电池组16背面与光伏发电平台4固定连接,太阳能电池组16顶部连接有光伏组件,如图4所示,光伏组件包括与太阳能电池组16侧壁固定连接的第二安装线,第二安装线末端固定连接有配电控制器17,配电控制器17侧壁固定连接有第三安装线,第三安装线末端固定连接有光电接收器18,光电接收器18侧壁固定连接有第四安装线,第四安装线末端固定连接有太阳能蓄电池19,通过光伏组件起到对外部的升空平台3、干扰平台5和拍摄平台6进行通电的作用。
55.通信基站1侧壁固定连接有第一固定线,第一固定线末端固定连接有仿真干扰系统20,仿真干扰系统20背面与武器干扰平台5固定连接,仿真干扰系统20顶部连接有武器干扰组件,如图5和图6所示,武器干扰组件包括与仿真干扰系统20侧壁固定连接的第二固定线,第二固定线末端固定连接有信号接收模块21,信号接收模块21侧壁固定连接有第三固定线,第三固定线末端固定连接有信号转换模块22,信号转换模块22侧壁固定连接有第四固定线,第四固定线末端固定连接有信号cpu处理模块23,信号cpu处理模块23顶部固定连接有第一输送线,第一输送线末端固定连接有雷达定位系统24,雷达定位系统24侧壁固定连接有第二输送线,第二输送线末端固定连接有无线干扰器25,无线干扰器25底部固定连接有第三输送线,第三输送线末端固定连接有光电干扰器26,光电干扰器26底部固定连接有第四输送线,第四输送线末端固定连接有干扰枪27,通过武器干扰组件起到干扰的作用。
56.通信基站1侧壁固定连接有第一传输线,第一传输线末端与相机控制模块28,相机控制模块28背面与拍摄平台6固定连接,相机控制模块28顶部连接有拍摄组件,如图7所示,拍摄组件包括与相机控制模块28侧壁固定连接的第二传输线,第二传输线末端固定连接有图像接收模块29,图像接收模块29侧壁固定连接有第四传输线,第四传输线末端固定连接有图像分析模块30,图像分析模块30侧壁固定连接有第一分析线,第一分析线末端固定连接有pc端31,pc端31侧壁固定连接有第二分析线,第二分析线末端固定连接有照片传输模块32,照片传输模块32侧壁固定连接有第三分析线,第三分析线末端固定连接有图像分析机33,图像分析机33底部固定连接有第四分析线,第四分析线末端固定连接有图像显示器34,通过拍摄组件起到拍摄的作用。
57.一种无人机电子战仿真效能支撑方法,包括以下步骤:
58.s1、先启动通信基站1,通过通信基站1带动信号进入第一安装线,接着从第一安装线进入太阳能电池组16,然后启动太阳能电池组16将能源传输入第二安装线,接着从第二安装线传输入配电控制器17,从而将电进行变频,调节调控的电排入第三安装线,接着传入入的电进入光电接收器18接收调控的电,跟着电进入第四安装线,然后从第四安装线进入太阳能蓄电池19内部蓄存,使得太阳能蓄电池19经过外部的电线带动支撑组件、武器干扰平台5和拍摄平台6进行通电;
59.s2、接着启动通信基站1,通过通信基站1带动信号进入第一连接线,接着从第一连接线进入吊钩接收模块7,使得接收的信号进入第二连接线,跟着从第二连接线传输入吊钩
转换模块8进行转换信息,然后转换的信号传输入第三连接线,跟着从第三连接线传输入吊钩处理模块9,使得将转换的信号进行处理,接着处理的信号进入第四连接线,同时从第四连接线进入吊钩螺旋悬挂10,然后从吊钩螺旋悬挂10上的第一吊装线和第二吊装线分别对光伏发电平台4和升空平台3进行搭载装配,跟着吊钩螺旋悬挂10上的第三吊装线和第四吊装线分别对武器干扰平台5和拍摄平台6进行搭载装配,从而对多个平台进行支撑安装;
60.s3、接着通信基站1带动信号进入装配线,接着从装配线传输入飞控仿真系统11,接着从飞控仿真系统11传输入第一支线,接着从第一支线传输入航行轨迹管理规划12,将信号进行规划控制,然后规划控制的信号传输入第二支线,接着将信号从第二支线传输入cpu控制模块13,从而通过cpu控制模块13对信号进行处理,接着处理的信号进入第三支线,然后从第三支线进入无人机仪表显示模块14显示,跟着信号进入第四支线,然后从第四支线进入自主导航模块15,从而带动外部的无人机自动巡航;
61.s4、然后通过通信基站1再次将信号传输入第一固定线,接着从第一固定线进入仿真干扰系统20,从而将干扰的信息传输入第二固定线,接着传输的信号进入信号接收模块21,从而对信号进行接收,然后接收的信号进入第三固定线,接着接收的信号传输入信号转换模块22,从而将信号进行转换,然后转换的信号进入第四固定线,然后从第四固定线进入信号cpu处理模块23对转换的信号进行处理,接着处理的信号传输入第一输送线,跟着从第一输送线进入雷达定位系统24接收定位信号,接着点位接收的信号进入第二输送线,然后从第二输送线进入无线干扰器25,从带动干扰的信号进入第三输送线,跟着从第三输送线进入光电干扰器26,然后从光电干扰器26进入光感传输,接着光感传输的信号进入干扰枪27,从而通过干扰枪27对外部电子设备进行干扰;
62.s5、同时通信基站1传输的信号进入第一传输线,跟着从第一传输线进入相机控制模块28,然后从相机控制模块28进入第二传输线,然后从第二传输线进入图像接收模块29对信号进行接收,然后接收的信号进入第四传输线,然后从第四传输线进入图像分析模块30对信号进行分析,接着分析的信号进入第一分析线,然后从第一分析线进入pc端31对接收的信号进行处理,跟着处理的信号进入第二分析线,然后从第二分析线进入照片传输模块32,然后从照片传输模块32进入第三分析线,然后从第三分析线进入图像分析机33,从而进一步的对信号进行分析,然后分析的信号进入第四分析线,接着从第四分析线进入图像显示器34进行显示。
63.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1