雷达管制模拟训练系统的飞行器运动模型参数生成方法与流程
1.本发明属于民航飞行器模拟仿真系统领域,具体涉及一种民航雷达管制模拟训练系统的飞行器运动模型参数生成方法。
背景技术:
2.民航雷达管制模拟训练系统用于空中交通雷达管制人员的训练、在岗培训和业务考核等任务,旨在迅速培养和提高雷达管制人员的管制技能,是培养进近、区域管制员的主要手段和标准设备。民航雷达管制模拟训练系统对提升管制员的管制水平和处理技能有着不可替代的作用,帮助管制人员应对航班增长和管制负荷大幅增加的压力,从而保证了民航交通管制的安全。
3.为了实现上述目标,民航雷达管制模拟训练系统强调仿真度的最大化。
4.现有民航雷达管制模拟训练系统,飞行器运动模型参数包含对外输出指定高度下的飞行速度,指定高度下的爬升率等。这些参数在目前的系统中,通过飞机的bada模型(base of aircraft data)计算获得。bada模型是欧洲航空安全组织开发的飞机飞行动力学分析模型。这个模型是用来确定飞机在爬升、巡航和下降阶段的性能参数,以及飞行各阶段的燃油量估算,主要应用于飞行仿真、航迹预测、排放评估和油耗计算四个方面。
5.由于bada模型是一个理想模型,经过对国内航班真实历史飞行数据分析,可以发现bada模型所提供的飞行参数存在诸多不合理之处。
6.大数据时代,数据挖掘技术在实际生成过程中被更广泛的得到应用。
7.现有发表的研究文献中,基于数据挖掘的轨迹分析研究主要面向4d飞行轨迹预测任务,但是飞行轨迹预测与模拟系统中飞行器的飞行模拟是看似相近却不相同的两个任务。4d飞行轨迹预测聚焦于单次飞行中,下一时刻的精准预测。4d飞行轨迹预测是一个时序问题,与下一时刻的状态参数紧耦合的是上几个时刻的飞行状态参数,与历史其他重复轨迹弱相关。而飞行模拟培训的任务是通过每次模拟练习的采样,能够逼近真实轨迹的分布特性,从而让管制人员能够对真实空中交通发生的各种情况进行充分的预演、训练。
8.现有技术中存在的不足之处总结如下:
9.1、基于bada模型的民航雷达管制模拟训练系统的飞行器运动模型参数计算,是个理想模型,没有考虑到不同航路给飞机参数带来的影响,没有考虑到人的因素在飞行驾驶中对飞行参数的影响,没有考虑到飞行参数在具体飞行过程中的随机性。
10.2、已有的基于历史数据挖掘的4d飞行轨迹分析工作并不适用于民航雷达管制模拟训练系统的飞行器运动模型参数提取。
技术实现要素:
11.针对于上述现有技术的不足,本发明的目的在于提供一种雷达管制模拟训练系统的飞行器运动模型参数生成方法,以解决现有技术中飞行器运动模型缺乏对航向、航线、高度等因素的考量,缺乏飞行随机性对模型参数影响的考量,导致飞行器运动模型参数设置
偏离真实飞行轨迹的问题。
12.为达到上述目的,本发明采用的技术方案如下:
13.本发明的一种雷达管制模拟训练系统的飞行器运动模型参数生成方法,步骤如下:
14.1)提取航班的历史飞行轨迹数据;
15.2)针对航班的历史飞行轨迹数据进行三级数据细化分类;
16.3)以步骤2)中的第三级分类结果为输入数据,抽取高度剖面数据,并对高度剖面数据进行预处理,得到对应高度层下飞行器运动模型参数,其包括速度、加速度,爬升率/下降率;
17.4)对步骤3)中的高度剖面的速度、加速度、爬升率和下降率进行频次统计,得到高度剖面的飞行器运动模型参数项的频次统计结果;
18.5)对步骤4)中的高度剖面的飞行器运动模型参数项的频次统计结果进行分布函数拟合,得到高度剖面的飞行器运动模型参数的生成模型;
19.6)将飞行器当前的飞行高度输入到步骤5)的生成模型,计算速度、加速度、爬升率/下降率,得到飞行器运动模型参数:[vh,ah,a
up
,a
down
]。
[0020]
进一步地,所述步骤1)具体包括:从民航空管自动化系统中解析出航迹数据,一次飞行的飞行数据保存成一个独立的文件,该文件包含机型、起飞机场代码、降落机场代码、飞行高度、飞行速度、航向航线、经纬度坐标、爬升标志位、下降标志位。
[0021]
进一步地,所述步骤2)具体包括:
[0022]
第一级分类:将获取的所有历史飞行航迹数据按照飞行器机型进行分类;
[0023]
第二级分类:对第一级分类的结果按照飞行航线再次分类;
[0024]
第三级分类:对第二级分类的结果按照起降机场再次分类。
[0025]
进一步地,所述步骤3)中的高度剖面数据指从1200米到12000米的高度,以1200米为起点,每隔300米为一个高度层,对应的飞行器运动模型参数。
[0026]
进一步地,所述步骤3)中的预处理具体为:计算速度的导数,得到加速度;将输入数据切分为爬升段数据/下降段数据,计算爬升段数据/下降段数据的导数,得到爬升率/下降率。
[0027]
进一步地,所述步骤5)具体包括:根据经验分布采用11种单变量分布(norm分布、lognorm分布、t分布、pareto分布、expon分布、dweibull分布、genextreme分布、gamma分布、beta分布、uniform分布、loggamma分布)对步骤4)中统计得到的飞行器运动模型参数项的频次统计数据进行拟合;通过残差平方和和假设检验方法,对11种拟合分布进行评分,返回最佳得分分布,即得到对应高度层剖面上,速度的采样生成模型p
h=i
(v)、加速度的采样生成模型p
h=i
(a)、爬升率的采样生成模型p
h=i
(a
up
)和下降率的采样生成模型p
h=i
(a
down
),其中,v表示速度,a表示加速度,a
up
表示爬升率,a
down
表示下降率,h为高度。
[0028]
进一步地,所述步骤6)具体包括:
[0029]
q(x),表示截断正态分布;
[0030]
q0~q(x),表示对q(x)采样,得到采样值q0;
[0031]
为常数;
[0032]
p
h=i
(v),表示第i个高度层的速度拟合分布函数;
[0033]
p
h=i
(a),表示第i个高度层的加速度拟合分布函数;
[0034]
p
h=i
(a
up
),表示第i个高度层的爬升率拟合分布函数;
[0035]
p
h=i
(a
down
),表示第i个高度层的下降率拟合分布函数;
[0036]
u0~uniform[0,1],表示对[0,1]均匀分布进行采样,得到值u0;
[0037]
若则接受对q(x)的采样q0赋值给速度vh,否则拒绝本次采样,重新采样;
[0038]
若则接受对q(x)的采样q0赋值给水平加速度ah,否则拒绝本次采样,重新采样;
[0039]
若则接受对q(x)的采样q0赋值给爬升率a
up
,否则拒绝本次采样,重新采样;
[0040]
若则接受对q(x)的采样q0赋值给下降率a
down
,否则拒绝本次采样,重新采样。
[0041]
本发明的有益效果:
[0042]
1、本发明通过对历史飞行轨迹的挖掘,提升了民航雷达管制模拟训练系统的仿真度,从而更好的帮助雷达管制人员进行管制技能训练,提升业务水平,保障民航交通管制的安全。
[0043]
2、本发明通过计算出真实飞行轨迹数据统计分布特征值,为模拟飞行中飞行器参数设置提供统计学依据。
[0044]
3、本发明充分考虑到了航路间的差异性,为模拟飞行器的参数进行了航路差异化设置。
[0045]
4、本发明充分考虑到了飞行过程中的随机性,为模拟飞行中飞行器参数设置提供了一个包含数据分布的参数生成模型,并给出了通过模得到最终输出参数的方法。
附图说明
[0046]
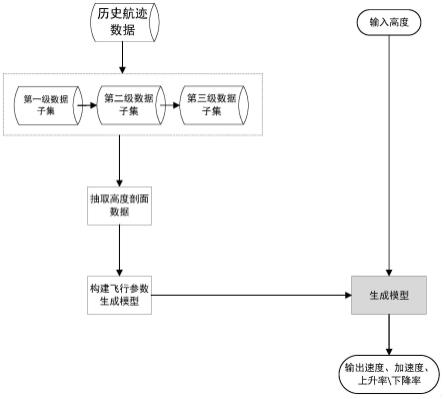
图1为本发明方法的原理图。
具体实施方式
[0047]
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
[0048]
参照图1所示,本发明的一种民航雷达管制模拟训练系统的飞行器运动模型参数生成方法,步骤如下:
[0049]
1)提取航班的历史飞行轨迹数据;具体包括:从民航空管自动化系统中解析出航迹数据,一次飞行的飞行数据保存成一个独立的文件,该文件包含机型、起飞机场代码、降落机场代码、飞行高度、飞行速度、航向航线、经纬度坐标、爬升标志位、下降标志位。
[0050]
2)针对航班的历史飞行轨迹数据进行三级数据细化分类;具体包括:
[0051]
第一级分类:将获取的所有历史飞行航迹数据按照飞行器机型进行分类;
[0052]
第二级分类:对第一级分类的结果按照飞行航线再次分类;
[0053]
第三级分类:对第二级分类的结果按照起降机场再次分类。
[0054]
3)以步骤2)中的第三级分类结果为输入数据,抽取高度剖面数据,并对高度剖面数据进行预处理,得到对应高度层下飞行器运动模型参数,其包括速度、加速度,爬升率/下降率;
[0055]
其中,所述高度剖面数据指从1200米到12000米的高度,以1200米为起点,每隔300米为一个高度层,对应的飞行器运动模型参数。
[0056]
预处理具体为:计算速度的导数,得到加速度;将输入数据切分为爬升段数据/下降段数据,计算爬升段数据/下降段数据的导数,得到爬升率/下降率。
[0057]
4)对步骤3)中的高度剖面的速度、加速度、爬升率和下降率进行频次统计,得到高度剖面的飞行器运动模型参数项的频次统计结果。
[0058]
5)对步骤4)中的高度剖面的飞行器运动模型参数项的频次统计结果进行分布函数拟合,得到高度剖面的飞行器运动模型参数的生成模型;具体包括:根据经验分布采用11种单变量分布(norm分布、lognorm分布、t分布、pareto分布、expon分布、dweibull分布、genextreme分布、gamma分布、beta分布、uniform分布、loggamma分布)对步骤4)中统计得到的飞行器运动模型参数项的频次统计数据进行拟合;通过残差平方和和假设检验方法,对11种拟合分布进行评分,返回最佳得分分布,即得到对应高度层剖面上,速度的采样生成模型p
h=i
(v)、加速度的采样生成模型p
h=i
(a)、爬升率的采样生成模型p
h=i
(a
up
)和下降率的采样生成模型p
h=i
(a
down
),其中,v表示速度,a表示加速度,a
up
表示爬升率,a
down
表示下降率,h为高度。
[0059]
6)将飞行器当前的飞行高度输入到步骤5)的参数生成模型,计算速度、加速度、爬升率/下降率,得到飞行器运动模型参数:[vh,ah,a
up
,a
down
];具体包括:
[0060]
q(x),表示截断正态分布;
[0061]
q0~q(x),表示对q(x)采样,得到采样值q0;
[0062]
为常数;
[0063]
p
h=i
(v),表示第i个高度层的速度拟合分布函数;
[0064]
p
h=i
(a),表示第i个高度层的加速度拟合分布函数;
[0065]
p
h=i
(a
up
),表示第i个高度层的爬升率拟合分布函数;
[0066]
p
h=i
(a
down
),表示第i个高度层的下降率拟合分布函数;
[0067]
u0~uniform[0,1],表示对[0,1]均匀分布进行采样,得到值u0;
[0068]
若则接受对q(x)的采样q0赋值给速度vh,否则拒绝本次采样,重新采样;
[0069]
若则接受对q(x)的采样q0赋值给水平加速度ah,否则拒绝本次采样,重新采样;
[0070]
若则接受对q(x)的采样q0赋值给爬升率a
up
,否则拒绝本次采样,重新采样;
[0071]
若则接受对q(x)的采样q0赋值给下降率a
down
,否则拒绝本次采样,重新采样。
[0072]
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1