多人伞降模拟训练系统、方法及存储介质与流程
1.本发明涉及伞降模拟训练技术领域,具体涉及一种多人伞降模拟训练系统、方法及存储介质。
背景技术:
2.长期以来对伞兵的训练一般依托实装进行,然而,这种训练模式存在着一些不可避免的不足:一、单纯的结合实际装备进行训练,训练场地、环境有限,受训人员和设备数量以及训练时间难以得到保证,训练效果和效率都不高;二、部分新伞具造价昂贵,结构复杂,还不能及时地全面装备相关单位,导致训练工作不能很好地展开,并且组织训练和维修的成本很高,难以对一些重点科目实现重复性、经常性训练;三、对于某些伞降训练科目,由于在使用实际装备进行训练时,安全性较差,危险系数高,实战化训练目标难以实现,或是在训练时出于安全一般选择减少训练量和降低训练难度,训练效果很难得到保证。因此,设计一种能够更加贴近组训实际需求的多人伞降模拟训练系统成为本领域技术人员亟待解决的技术问题。
技术实现要素:
3.针对所述缺陷,本发明实施例公开了一种多人伞降模拟训练系统、方法及存储介质,其能够提供更为贴合实际的伞降技术模拟训练,有效提高整体训练质效。
4.本发明实施例第一方面公开了一种多人伞降模拟训练系统,包括:
5.管理主机,所述管理主机设置于主控区域;所述管理主机与用户端设备和显示设备通信连接,所述管理主机用于将管理员输入的控制指令发送至相应的用户端设备处,所述管理主机内设置有伞降训练模块,管理员基于所述伞降训练模块配置参与训练人员信息以及训练任务信息;
6.用户端设备,所述用户端设备设置于副控区域;所述用户端设备用于接收管理主机发送的训练任务信息,并根据所述训练任务信息将训练控制指令发送至伞降控制装置处,所述用户端设备还用于将虚拟场景和相应的用户操作参数发送至vr智能眼镜处;
7.伞降控制装置,所述伞降控制装置用于发送所述训练控制指令至相应的伞降技术模拟端以控制伞降技术模拟端的工作状态;
8.伞降技术模拟装置,所述伞降技术模拟装置的数量为多个,多个所述伞降技术模拟装置设置于训练场地的伞降技术模拟区域;所述伞降技术模拟装置包括升降平台、vr智能眼镜和跳伞装置,所述跳伞装置包括安装框架、升降机构、背带单元、操纵单元、plc控制模块和通信模块;所述操纵单元包括操纵带以及拉力传感器,所述操纵带包括牵引端和传感端,所述牵引端可活动地穿接于所述背带单元上,所述传感端与所述拉力传感器相连接;所述升降机构设置于安装框架处,所述背带单元与升降机构固定,所述升降机构、通信模块和拉力传感器均与plc控制模块电性连接;
9.定位器,所述定位器的数量为偶数个,且其成对对角安装,所述定位器用于对伞降
技术模拟区域内的多个用户姿态以及位置进行区分、识别;
10.显示装置,所述显示装置设置于显示区域,所述显示设备用于对接收到的管理主机处进行显示。
11.作为一种可选的实施方式,在本发明实施例第一方面中,所述vr智能眼镜为vr智能眼镜;所述显示装置包括主显示装置和副显示装置,所述主显示装置和副显示装置均与管理主机通信连接,所述主显示装置用于对当前训练中的所有跳伞员操作信息进行展示,所述副显示装置用于对管理员选中的跳伞员进行信息展示。
12.作为一种可选的实施方式,在本发明实施例第一方面中,所述升降平台与跳伞装置分立设置,所述升降平台包括安装底座、升降踏板和驱动装置,所述安装底座上设置有安装槽;所述升降踏板安装于所述安装槽内,且在所述升降踏板与安装槽之间还设置有传感器以将检测到的信号传输至plc控制模块;所述驱动装置设置于安装底座内,所述驱动装置用于驱动升降踏板上下移动;所述传感器和驱动装置均与所述plc控制模块电性连接,所述plc控制模块用于根据传感器传输的信号来控制驱动装置的工作状态;
13.还包括t型标识,所述t型标识设置于标识区域;所述标识区域位于伞降技术模拟区域前方右侧。
14.本发明实施例第二方面公开一种多人伞降技术模拟方法,包括:
15.响应于用户基于所述伞降训练模块配置的参与训练人员信息和训练任务信息;
16.当所述训练人员信息与伞降技术模拟装置的数量不匹配时,生成相应的模拟人员信息,根据所述模拟人员信息以及训练人员信息生成相应用户端设备的启动参数;
17.将所述启动参数以及训练任务信息发送至相应的用户端设备处以启动用户端设备,在用户端设备处基于所述训练任务信息加载相应的训练场景信息,并将所述训练场景信息发送至相应的vr智能眼镜以进行虚拟化显示;
18.接收通过用户端设备传输的伞降训练信息,所述伞降训练信息为在伞降技术模拟过程中受训人员在伞降技术模拟装置处的各种操作信息;
19.根据所述伞降训练信息确定相应的伞降训练结果。
20.作为一种可选的实施方式,在本发明实施例第二方面中,所述伞降技术模拟方法还包括:
21.接收用户基于伞降训练模块配置伞降顺序信息,并将所述伞降顺序信息发送至各个用户端设备处以进行顺序确认。
22.作为一种可选的实施方式,在本发明实施例第二方面中,所述伞降技术模拟方法还包括:
23.基于所述伞降训练模块将接收到的各个用户端设备传输的用户视野画面投屏至主显示装置处的第一显示区域;
24.基于所述伞降训练模块将训练过程中各个人员的伞降状态信息投屏至主显示装置处的第二显示区域;
25.响应于用户基于所述伞降训练模块的操作信息,将与受训人员相关的操作画面信息投屏至副显示装置处;所述操作画面信息包括设备编号、左摇杆信息、右摇杆信息和跳伞画面信息。
26.作为一种可选的实施方式,在本发明实施例第二方面中,所述伞降技术模拟方法
还包括:
27.将预先存储的示教讲解画面通过相应的用户端设备发送至vr智能眼镜处以进行演示教学讲解;
28.在演示教学讲解过程中,接收通过用户端设备传输的受训人员在伞降技术模拟装置处的受训操作信息,并将所述受训操作信息与预设操作信息进行匹配以确定是否操作一致,若不一致,则发送提示信息至vr智能眼镜以进行信息提醒。
29.作为一种可选的实施方式,在本发明实施例第二方面中,所述响应于用户基于所述伞降训练模块配置的参与训练人员信息和训练任务信息,包括:
30.接收用户基于所述伞降训练模块选择的机型信息;
31.接收用户基于所述伞降训练模块选择的训练场景信息;
32.接收用户基于所述伞降训练模块选择的飞行路线信息;
33.接收用户基于所述伞降训练模块选择的落地点信息;
34.根据所述机型信息、训练场景信息、飞行路线信息和落地点信息生成相应的训练任务信息;
35.根据所述训练任务信息加载相应的仿真训练场景;
36.接收用户基于所述伞降训练模块输入的人员信息。
37.作为一种可选的实施方式,在本发明实施例第二方面中,所述接收通过用户端设备传输的伞降训练信息,包括:
38.接收通过用户端设备传输的开伞时间信息;
39.接收通过用户端设备传输的落地位置信息;
40.根据所述落地位置信息确定相应的面向标识信息以及与其他受训人员的距离信息;
41.接收通过用户端设备传输着陆操作信息;
42.所述根据所述伞降训练信息确定相应的伞降训练结果,包括:
43.根据所述开伞时间信息、面向标识信息、与其他受训人员的距离信息以及着陆操作信息确定相应受训人员的得分情况。
44.本发明实施例第三方面公开一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,用于执行本发明实施例第一方面公开的多人伞降技术模拟方法。
45.本发明实施例第四方面公开一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序使得计算机执行本发明实施例第一方面公开的多人伞降技术模拟方法。
46.与现有技术相比,本发明实施例具有以下有益效果:
47.本发明实施例中的多人伞降模拟训练系统通过采用管理主机来集中控制多个用户端设备的工作状态,进而与伞降技术模拟装置和vr智能眼镜来进行信息交互;通过上述设定使得多名受训人员可以同时同场景进行模拟训练,大大提高了整体的训练质效。
附图说明
48.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领
域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
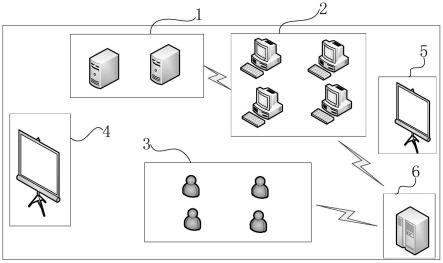
49.图1是本发明实施例公开的多人伞降模拟训练系统的结构示意图;
50.图2是本发明实施例公开的多人伞降模拟训练系统的数据交互示意图;
51.图3是本发明实施例公开的vr智能眼镜的数据交互示意图;
52.图4是本发明实施例公开的多人伞降模拟训练系统的总体架构图;
53.图5是本发明实施例公开的伞降技术模拟的画面显示示意图;
54.图6是本发明实施例公开的多人伞降技术模拟方法的流程示意图;
55.图7是本发明实施例公开的伞降模拟训练系统的一参数调整页面图;
56.图8是本发明实施例公开的伞降模拟训练系统的另一参数调整页面图;
57.图9是本发明实施例公开的成绩显示的页面示意图;
58.图10是本发明实施例公开的显示画面的页面示意图;
59.图11是本发明实施例公开的伞降模拟训练系统的成绩可视化显示示意图;
60.图12是本发明实施例提供的一种自动升降平台的结构图;
61.图13是本发明实施例提供的安装底座的结构示意图;
62.图14是本发明实施例提供的压力传感器的结构示意图;
63.图15是本发明实施例提供的跳伞装置的结构示意图;
64.图16是本发明实施例公开的伞降特情模拟训练方法的流程示意图;
65.图17是本发明实施例公开的天气特情设置的具体流程示意图;
66.图18是本发明实施例公开的接近特情设置的具体流程示意图;
67.图19是本发明实施例公开的垂直接近的场景示意图;
68.图20是本发明实施例公开的水平接近的场景示意图;
69.图21是本发明实施例提供的一种多人伞降技术模拟装置的结构示意图;
70.图22是本发明实施例提供的一种电子设备的结构示意图。
71.附图标记:1、管理主机;2、用户端设备;3、伞降技术模拟装置;31、安装底座;311、固定台阶;312、可移动台阶;3121、安装槽;32、升降踏板; 33、第一压力传感器;34、第二压力传感器;35、驱动装置;351、直线驱动机构;352、驱动杆;353、第一连接杆;354、第二连接杆;355、第一导向件; 356、第二导向件;36、感应指示灯;37、安装框架;38、升降机构;4、主显示装置;5、副显示装置;6、伞降控制装置。
具体实施方式
72.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
73.需要说明的是,本发明的说明书和权利要求书中的术语“第一”、“第二”、“第三”、“第四”等是用于区别不同的对象,而不是用于描述特定顺序。本发明实施例的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,示例性地,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包
括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
74.本发明实施例公开了多人伞降技术模拟系统、方法及存储介质,通过采用管理主机来集中控制多个用户端设备的工作状态,进而与伞降技术模拟装置和 vr智能眼镜来进行信息交互;通过上述设定使得多名受训人员可以同时同场景进行训练,大大提高了整体的训练质效。
75.实施例一
76.如图1-图5所示,本发明实施例公开了一种多人伞降模拟训练系统,包括:
77.管理主机1,所述管理主机1设置于主控区域;所述管理主机1与用户端设备2和显示设备通信连接,所述管理主机1用于将管理员输入的控制指令发送至相应的用户端设备2处,所述管理主机1内设置有伞降训练模块,管理员基于所述伞降训练模块配置参与训练的人员信息以及训练任务信息;
78.用户端设备2,所述用户端设备2设置于副控区域;所述用户端设备2用于接收管理主机1发送的训练任务信息,并根据所述训练任务信息将训练控制指令发送至伞降控制装置6伞降控制装置6处,所述用户端设备2还用于将虚拟场景和相应的用户操作参数发送至vr智能眼镜处;
79.在进行具体划分的时候,也即是将其划分为教练员端和跳伞员端,教练员下达口令后,跳伞员戴上头盔进行跳伞模拟训练,在每个人对应的vr智能眼镜显示画面上,可以看到当前的训练场景和其他跳伞员的位置和动作,从而实现跳伞教学训练。教练员端处的管理主机1主要分为示教讲解模块、仿真训练模块、场景设置模块、方案设置模块、成绩查询模块这5个层面建设,实现在vr 场景下进行跳伞训练的功能。在本发明实施例中示教讲解提供跳伞vr视频,教练员通过此功能模块对跳伞员进行讲解,并提供讲解注释;仿真训练提供模拟训练场景,通过此功能模块模拟显示跳伞场景,可以加载方案和进行多人训练;场景设置实现对仿真场景的设置,包括设置路线、机型和地型;方案设置实现对仿真方案的设置,并可以将设置好的方案保存至数据库,用户通过读取方案实现仿真训练;成绩查询将跳伞员训练的成绩存储,用户可查看跳伞员成绩详情,回放跳伞员操作并导出;系统管理实现对系统参数的配置,包含基础参数、寄存器、离散量、单线圈的参数配置。
80.本发明实施例中采用分布协同训练交互仿真技术来进行仿真通信,如图2 所示,hla是一个开放且能够支持面向对象的技术体制,它利用提供通用、相对不受约束的支撑服务程序,可以把应用系统模块同底层框架系统2部分功能分离开,也就是把详细的仿真功能实现、仿真运行管理和底层数据交互三层隔开,隐藏各部分的实现详情。本技术的方案基于反射技术,设计更为通用的高层仿真框架(high level simulation framework,hlsf),来解决分布系统的增量式开发和可扩展性问题。高层仿真框架hlsf,它继承了hla/rti的优点,同时又具有以下特点:
81.采用客户机/服务器模式,用于通信的对象模型只需在服务器上加载。建立在面向对象基础上,以最小通信实体为对象实例(指类的实例,并非rti中的对象实例),对象类能够有机结合物理模型、行为模型的开发。支持远程异地 (跨平台、跨进程)与本地实例、远程与远程实例、本地与本地实例间的交互,让用户感觉到与远程实体的通信就和本地的实体一样。参与交互的对象实例在系统设计时就考虑了多线程的安全性,有效支持数据干预输入、输出二维三维显示、截取分流、人机交互等,用户不必为线程安全性操心。在面向对象的
高层仿真框架下,对象模型的设计真正做到面向对象,即网络通信对象模型的设计就是物理模型的设计,能将网络交互与物理建模有机结合,有效支持本系统的快速、敏捷、增量式开发。
82.伞降控制装置6伞降控制装置6,所述伞降控制装置6伞降控制装置6用于发送所述训练控制指令至相应的伞降技术模拟端以控制伞降技术模拟端的工作状态;本发明实施例的伞降控制装置6伞降控制装置6主要是为了实现信息中转,主要是对用户端传输的数据进行解析传输;在进行实施时,本发明实施例的方案主要是通过无线传输的方式来进行操作,大大简化了整体的空间布线,并且由于采用多台设备使得整体的使用稳定性提高,因为当采用有线连接的时候,会大大增加设备使用的复杂度。
83.伞降技术模拟装置3,所述伞降技术模拟装置3的数量为多个,多个所述伞降技术模拟装置3设置于训练场地的伞降技术模拟区域;所述伞降技术模拟装置3包括升降平台、vr智能眼镜和跳伞装置,所述跳伞装置包括安装框架37、升降机构38、背带单元、操纵单元、plc控制模块和通信模块;所述操纵单元包括操纵带以及拉力传感器,所述操纵带包括牵引端和传感端,所述牵引端可活动地穿接于所述背带单元上,所述传感端与所述拉力传感器相连接;所述升降机构38设置于安装框架37处,所述背带单元与升降机构38固定,所述升降机构38、通信模块和拉力传感器均与plc控制模块电性连接;
84.通过采用升降台与升降机构38分离设置的方式,这样能够更好的利用整体空间,使得该设备设置于室内成为可能;大大提升了该伞降模拟训练系统使用的稳定性。在本发明实施例中采用的vr智能眼镜,也即是vr头盔,其是采用的是基于unity3d引擎的vr智能眼镜技术。虚拟现实(vr)头盔内部主要包括透镜、液晶屏、头部采集模块、嵌入式处理模块及数据传输模块,详细的流程框架图下图3所示。虚拟现实头盔的主控模块是以stm32处理器为核心构成的,它与外围电路的主要工作为:读取传感器模块的测量值,再进行滤波融合算法的运算得到人体头部的角度信息,接着通过usb-hid或无线模块将角度数据信息传输至pc。然后在pc端采用unity3d引擎整合传输过来的头部角度信息,并在unity3d上搭建虚拟场景且对画面进行渲染处理,再发布成.exe 格式的软件包。最后通过hdmi视频信号传输线把画面传输至虚拟现实头盔内部的液晶屏,在虚拟现实头盔上通过透镜观看虚拟场景使体验者身临其境。本系统在unity3d里采用两个相机对场景进行分屏渲染,这样就可以正确的模拟人的双眼视觉。同时,为了使体验者产生一种身在虚拟世界当中的错觉,而不仅仅是像看3d电影那样只是在面前呈现场景画面,并且又不使用户贴着屏幕使眼睛的焦距变短。虚拟现实头盔设备采取光学透镜来调焦以达到扩大视野范围的作用并使人眼产生屏幕远离自己的错觉,这样就像现实生活中人眼看物体一样有立体感。经过unity3d创建地形效果图如下图5所示。mongodb是一个分布式文档数据库,是当前新型革命式nosql数据库的一种。它会充分使用系统内存作为缓存,对数据的操作大部分在内存中,mongodb会尽可能在内存即将写不进去数据时再将数据存入磁盘,数据格式为bson的格式,即binary-json。它的特性使其非常适用于微服务架构:多模数据库(multi-model)、原生json 数据结构、动态/无模式(dynamic schema/schemaless)、数据更改流(changestream)、横向扩展能力(sharding)。
85.本软件系统综合利用了vr训练场景生成技术、复杂气象条件下伞衣操作建模与仿真、分布协同训练交互仿真技术以及基于unity3d引擎的vr智能眼镜等关键技术,对机舱和
多人跳伞仿真模拟系统中的难点问题提供了解决方案。仿真训练是为了让跳伞员熟悉跳伞训练中各个步骤,通过加载预先设置的训练方案,针对不同特情、机型、降落场、气象及路线进行模拟仿真跳伞训练。
86.本发明实施例的方案包括教练机以及跳伞员机,教练机显示路线详情,待跳伞员接入系统场景后,点击开始训练进行仿真训练。
87.定位器,所述定位器的数量为偶数个,所述定位器用于对伞降技术模拟区域内的多个用户的姿态以及位置来进行区分;这里的定位器主要指的vr定位器,当采用2*2的模拟装置分布方式的时候,可以采用四个定位器分别设置于四个顶角,并且斜对角形成一组定位装置来实现对相应受训人员的vr定位或者姿态识别。
88.具体的,在进行实施时,其可以设置于室内训练教室内,由于采用了升降台与跳伞装置分离设置的方式,使得整体系统占据的空间更小。一般采用矩阵排列的设置方式来进行伞降技术模拟装置3的放置操作,比如采用2*2或者4*4 的矩阵设置方式来进行放置安排。
89.显示装置,所述显示装置设置于显示区域,所述显示设备用于对接收到的管理主机1处进行显示。
90.在本发明实施例中还设置有观摩区域,通过设置观摩区域使得没有参加模拟的人员有固定的区域来进行跳伞观摩,通过显示装置能够实时的显示受训人员的跳伞状态。
91.作为一种可选的实施方式,在本发明实施例第一方面中,所述智能眼镜为 vr智能眼镜;所述显示装置包括主显示装置4和副显示装置5,所述主显示装置4和副显示装置5均与管理主机1通信连接,所述主显示装置4用于对当前训练中的所有跳伞员的操作信息进行展示,所述副显示装置5用于对管理员选中的跳伞员进行信息展示。
92.在进行设置的时候主显示装置4设置于一侧,副显示装置5设置于另一侧,并且其可以显示不同的内容,使得用户更加方便进行观看;在进行实施时,可以采用投影设备来进行显示。
93.作为一种可选的实施方式,在本发明实施例第一方面中,所述升降平台与跳伞装置分立设置,如图15所示,所述升降平台包括安装底座31、升降踏板 32和驱动装置35,所述安装底座31上设置有安装槽3121;所述升降踏板32安装于所述安装槽3121内,且在所述升降踏板32与安装槽3121之间还设置有传感器以将检测到的信号传输至plc控制模块;所述驱动装置35设置于安装底座 31内,所述驱动装置35用于驱动升降踏板32上下移动;所述传感器和驱动装置35均与所述plc控制模块电性连接,所述plc控制模块用于根据传感器传输的信号来控制驱动装置35的工作状态;
94.还包括t型标识,所述t型标识设置于标识区域;所述标识区域位于训练场地的伞降技术模拟区域前方右侧。
95.如图11-图14所示,本发明实施例提供了一种伞降模拟训练用自动升降平台,包括:
96.安装底座31,所述安装底座31上设置有安装槽3121;
97.升降踏板32,所述升降踏板32安装于所述安装槽3121内,且在所述升降踏板32与安装槽3121之间还设置有传感器以将检测到的压力信号传输至控制模块;
98.驱动装置35,所述驱动装置35设置于安装底座31内,所述驱动装置35用于驱动升
降踏板32上下移动;
99.控制模块,所述传感器和驱动装置35均与所述控制模块电性连接,所述控制模块用于根据传感器传输的压力信号来控制驱动装置35的工作状态。
100.本发明实施例通过多组传感器检测跳伞员走上平台的运动过程及当前位置,当检测到跳伞员站上固定台阶时,则控制驱动装置驱动升降踏板32上升;当检测到跳伞员站上升降踏板32时,控制驱动装置35保持升降踏板处于升起状态;当检测到升降踏板32上没有跳伞员时,则控制驱动装置35驱动升降踏板32下降、收缩到安装底座内;上述装置方便将跳伞者送往高位起跳点,保证具有一定的模拟离机高度,方便营造逼真的空中操纵场景。更为优选的,所述安装底座31包括固定台阶311和可移动台阶312,所述可移动台阶312在竖直方向的高度大于固定台阶311在垂直方向上的高度;所述可移动台阶312上设置有安装槽3121,所述升降踏板32安装于所述安装槽3121内。
101.也即是本实施例的方案的采用多级台阶的设置方式,在起始的台阶设置为固定的方式,在后续的相对较高的台阶设置可移动台阶312的方式。这样做的好处在于,能够更加安全的将跳伞员送到更高的位置去;直接采用一级台阶的设置方式,直接将跳伞员送到高处会增加较高的风险,因为如果跳伞员没有踏稳的话,此时台阶又开始升起,那么当升高的高度大于跳伞员的腿长时,则会对跳伞员产生伤害。这里的传感器可以是压力传感器,也可以是重力传感器,其主要目的是为了检测跳伞员是否站立上去;在进行具体实施的时候,甚至还可以设置红外传感器来对是否有人进行监测。
102.更为优选的,所述固定台阶311的数量为多个。能够提升跳伞高度,增加跳伞员的真实体验。
103.更为优选的,所述安装槽3121为长方形安装槽3121,所述传感器为第一压力传感器33,所述第一压力传感器33的数量为四个,四个第一压力传感器33 设置于长方形安装槽3121的四角。
104.通过采用多个传感器的设置方式,使得能够增加传感器检测的精准度;在进行具体设置的方式。
105.更为优选的,在所述固定台阶311处设置有第二压力传感器34,所述第二压力传感器34用于将检测到的压力信号传输至主控模块。
106.在固定台阶311处设置压力传感器使得该升降平台的提升更加的稳定,只有在跳伞员踏过第二压力传感器34之后才启动第一压力传感器33来进行压力检测,在第二压力传感器34没有检测到压力信号的时候,则不启动第一压力传感器33来进行压力检测,也即是不会控制驱动装置35的工作状态。
107.更为优选的,所述驱动装置35包括直线驱动机构351、驱动杆352、第一连接组件和第一导向组件,所述第一连接组件包括第一连接杆353和第二连接杆354,所述第一连接杆353和第二连接杆354铰接;所述第一导向组件包括第一导向件355和第二导向件356;
108.所述直线驱动机构351与控制模块电性连接,所述第一连接杆353的一端安装于升降踏板32,所述第一连接杆353的另一端与驱动杆352的一端固定,且与所述第一导向件355相连接,所述第二连接杆354的一端安装于安装底座 31,所述第二连接杆354的另一端与第二导向件356滑动连接。
109.更为优选的,所述驱动装置35还包括第二连接组件和第二导向组件,所述第一连
接组件和第一导向组件设置于安装底座31的一侧,所述第二连接组件和第二导向组件设置于安装底座31的另一侧;
110.所述第二连接组件包括第三连接杆和第四连接杆,所述第三连接杆和第四连接杆铰接;所述第二导向组件包括第三导向件和第四导向件;
111.所述第三连接杆的一端安装于升降踏板32,所述第三连接杆的另一端与驱动杆352的一端固定,且与所述第三导向件相连接,所述第四连接杆的一端安装于安装底座31,所述第四连接杆的另一端与第四导向件滑动连接。
112.通过直线驱动机构351来驱动驱动杆352前后移动,由于驱动杆352设置在导向件处,也即是导向槽内,进而实现更稳固的前后移动。在进行具体实施时,第一连接组件和第一导向组件设置在安装底座31的一侧,第二连接组件和第二导向组件设置在安装底座31的另一侧;并且由于第一连接组件采用两根连接杆铰接的方式,这样能够实现更稳定的支撑的作用。
113.更为优选的,所述第一导向件355为导向槽或者导向板。这里所说的导向板则指的是如图中所示的导向件,其能够起到限位的作用。
114.更为优选的,所述直线驱动机构351为液压油缸或者伺服驱动电机。该直线驱动机构351的主要功能即是实现前后移动,其具体形式可以是电机或者气缸的形式。
115.更为优选的,还包括与控制模块电性连接的感应指示灯36。通过设置该感应指示灯36来对跳伞员站立状态进行显示。
116.本发明实施例通过在升降踏板32处设置传感器来对跳伞员是否站立上去进行检测,当检测到有跳伞员站上去的时候,则控制驱动装置35驱动升降踏板32 上升;当检测到升降踏板32上没有跳伞员时,则控制驱动装置35驱动升降踏板32下降;上述装置方便将跳伞者送往高处,保证具有一定的跳伞高度,方便跳伞员使用。
117.本发明实施例通过采用osg技术、dem高程模型来进行数据信息的模拟, open scene graph(osg)能够更加快速、便捷地创建高性能、跨平台的交互式图形程序。open scene graph是一个开放源码,跨平台的图形开发包,它为诸如飞行器仿真,游戏,虚拟现实,科学计算可视化这样的高性能图形应用程序开发而设计。它基于场景图的概念,它提供一个在opengl之上的面向对象的框架,从而能把开发者从实现和优化底层图形的调用中解脱出来,并且它为图形应用程序的快速开发提供很多附加的实用工具。
118.osg采用c++书写,使用了标准模版库(stl)。osg使用场景树的方式来管理三维场景,使用逻辑组来构建场景树,以便进行高效的渲染和遍历等。 osg使用运行时对各种显卡扩展的实时检测,使得osg支持从opengl1.0到 opengl4.2以及opengl es 1.1到2.0的所有设备,所以不管设备新旧,操作系统如何,osg均能及时识别出它支持什么版本的ogl或oes,然后完好的在其上运行。这也就使得该系统的适配性更好。
119.osg采用模块化的设计,降低了osg内部模块的耦合性,使得用户更加容易理解。并且osg提供了丰富的示例,通过阅读这些示例可以很好的学习这些模块。模块化的设计使得用户不仅可以只学习和使用自己需要的模块,也可以根据需要定制自己的模块。
120.osg还有如下几种优点:高性能、可扩展性、接口化等;具体的,支持基于视锥体的裁切、基于遮档的裁切以及其它的小特性裁切,支持lod、opengl 状态排序、vao、vbo以及着色语言、显示列表等所有的图形学里经常提到的提高效率的招数。它使得osg成为一个效率
高,表现力好的引擎。osg同样支持客户化的lod,客户可以自己定制基于分页的四叉树场景结构用来实现复杂场景,具体可以看一下vtp和delta3d以及osgearth;osg的核心支持所有的 opengl扩展,哪怕是刚发布的最新扩展,对其进行封装,优化使得用户不用关注opengl那些底层的代码和扩展等,就可以快速的搭建基于最新特性的三维应用程序。除对底层代码的封装外,osg还有着与其它系统类似performer以及 openinventor等各种现代高级系统的结合,这些结合的案例可以使得用户快速的将osg与自己的系统相结合提供帮助。osg和现有与三维相关的,尤其是基于 opengl的系统有着丰富的结合案例,可以看一下业内知名人士array的 osgrecipes、osgxi以及osgcookbook从中获取三维系统与osg相结合的方案灵感。osg支持市面上几乎所有的数据格式,无论是图片还是三维模型,以及字体等都能很好的读取。除了支持单一的格式外,osg还有vpb、osgearth以及其它不常用的扩展来支持对海量数据的处理和读取。osg做到不依赖任何与操作系统有关的中间件,只使用标准c++和opengl,早期在irix上开发,随后扩展到linux、windows、mac、aix以及andriod和其它操作系统。osg的接口化保证了其高度独立,这也使得其除了跨各种平台以外,还可以支持各种ui,比如mfc、qt、sdl、glut、wxwidget、cocoa 等。osg可以运行在多核的cpu和gpu上,这缘于osg对opengl显示列表和纹理单元以及拣选、绘制遍历等过程实施了保护措施,使这些阶段可以单独为一个线程也可以在一个线程中串行执行。可以通过osgviewer以及所有的例子来配置当前osg应用程序的线程模型。
121.数字高程模型(digital elevation model),简称dem,是通过有限的地形高程数据实现对地面地形的数字化模拟(即地形表面形态的数字化表达),它是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地形模型 (digital terrain model,简称dtm)的一个分支,其它各种地形特征值均可由此派生。一般认为,dtm是描述包括高程在内的各种地貌因子,如坡度、坡向、坡度变化率等因子在内的线性和非线性组合的空间分布,其中dem是零阶单纯的单项数字地貌模型,其他如坡度、坡向及坡度变化率等地貌特性可在dem的基础上派生。
122.dem分辨率是dem刻画地形精确程度的一个重要指标,同时也是决定其使用范围的一个主要的影响因素。dem的分辨率是指dem最小的单元格的长度。因为dem是离散的数据,所以(x,y)坐标其实都是一个一个的小方格,每个小方格上标识出其高程。这个小方格的长度就是dem的分辨率。分辨率数值越小,分辨率就越高,刻画的地形程度就越精确,同时数据量也呈几何级数增长。所以dem的制作和选取的时候要依据需要,在精确度和数据量之间做出平衡选择。目前我国已经完成了1:50000地形图的制作dem的数据库的建设。如图为本系统运用dem技术进行渲染后的结果。
123.本系统将采用open scene graph基于dem(数字高程模型)数据和卫星影像数据生成大面积高逼真的地面地形地貌场景或基于海浪谱方法生成多分辨率海面场景,并将高质量头盔显示器的跟踪器信息实时采集,动态反映受训者的观察位置和姿态,使场景信息根据受训者头部位置变化而实时刷新。
124.本系统将采用openal(open audio library)是自由软件界的跨平台音效 api来进行听觉信息模拟,由loki software,使用在windows、linux系统上,用在音效缓冲和收听中编码。openal设计给多通道三维位置音效的特效表现。其api风格模仿自opengl。
125.openal主要的功能是在来源物体、音效缓冲和收听者中编码。来源物体包含一个
指向缓冲区的指标、声音的速度、位置和方向,以及声音强度。收听者物体包含收听者的速度、位置和方向,以及全部声音的整体增益。缓冲里包含8或16位元、单声道或立体声pcm格式的音效资料,表现引擎进行所有必要的计算,如距离衰减、多普勒效应等。不同于opengl规格,openal规格包含两个api分支;以实际openal函式组成的核心,和alc api,alc用于管理表现内容、资源使用情况,并将跨平台风格封在其中。还有“alut”程式库,提供高阶“易用”的函式,其定位相当于opengl的glut。
126.本系统采用openal生成具有三维空间感、方位感的声音,在虚拟场景中能使跳伞者准确地判断出声源位置、与在真实世界中的心理听觉方式相符、使其获得与临场相似的方位感、距离感、运动感、环境感的听觉感受。
127.在复杂气象条件下的伞衣操作建模与仿真,降落伞打开后至伞全部张开稳定下降,包括三个过程:即降落伞拉直过程、伞衣充气过程和稳定下降过程。稳定下降过程主要是坐标系的转换和加入风力的影响,相对简单,比较复杂的是伞衣充气过程的数学模型。圆形伞为轴对称半圆形状,由伞顶中央o点至伞绳下端连接点q为轴线,首先将其伞衣按伞绳间隔切成“桔皮瓣”状径向条带,充气过程条带将变形为“瓦状弧”,并在伞绳拉紧下向下弯,分析计算每一条带上的张力,然后才能获知变形条带中由上冲气流产生的气动升力,最后合并条带的气动升力,即为伞下降的阻力。下降阻力求出后与跳伞者重力进行叠加,形成合力,便可求出伞的加速度及速度,整个下降过程便可解算出。
128.基于ar/vr的机舱和多人跳伞模拟系统技术架构,如图所示,数据层:是整个伞降模拟训练系统的数据来源,主要包括三维模型数据和数学模型数据。首先,根据甲方提供的机舱及二维图纸、其它软件生成的模型在3dmax软件完成建模、渲染、烘焙等工作,导入unity3d引擎完成三维场景的制作;然后,基于 matlab/c#/c++等建立伞降操纵数学模型;服务层:为了提高代码的复用性和整个系统的灵活配置和可扩展性,将后台服务封装成标准化的组件,包括:数据持久层服务:基于nhibernate框架实现数据表与业务对象实体之间的orm映射;ui界面服务:封装ui界面组件为前台应用提供ui界面框架;数据访问服务:将三维模型和数学模型数据进行封装,提供统一的数据访问接口dll,供应用层调用,实现数据模型与三维模型间的实时交互以及训练数据的统一管理;分布式仿真中间件:将应用模块与数据总线之间的socket通信方法封装成标准组件,实现多人协同的模拟训练,对多人训练进行调控管理;安全服务:为平台提供安全加密处理,防止无权限用户访问和修改平台资源;报表服务:根据训练数据的业务封装对应的报表显示组件,用于平台图表的多样化管理;日志服务:封装将日志信息输出到各种目标(控制台、文件、数据库等)功能组件,用于系统运维调试;应用层:包括示教讲解、跳伞训练、考核评估、系统设置等等应用功能。
129.本发明实施例的方案提供多人同时进行的跳伞训练功能,不同跳伞人员通过佩戴vr头戴式显示器,可在场景中实时观察自己、同伴、伞、空中及地面场景。
130.实施例二
131.请参阅图6,图6是本发明实施例公开的多人伞降技术模拟方法的流程示意图。其中,本发明实施例所描述的方法的执行主体为由软件或/和硬件组成的执行主体,该执行主体可以通过有线或/和无线方式接收相关信息,并可以发送一定的指令。当然,其还可以具有一定的处理功能和存储功能。该执行主体可以控制多个设备,例如远程的物理服务器或云服务器以及相关软件,也可以是对某处安置的设备进行相关操作的本地主机或服务器以
及相关软件等。在一些场景中,还可以控制多个存储设备,存储设备可以与设备放置于同一地方或不同地方。如图6所示,该基于多人伞降技术模拟方法包括以下步骤:
132.s101:响应于用户基于所述伞降训练模块配置的参与训练的训练人员信息和训练任务信息;
133.本步骤主要是教员在主机上进行操作,其需要配置本次训练的各项任务、训练内容以及训练人员,用户可以选择在教练机处显示各县配置内容。
134.具体的,所述响应于用户基于所述伞降训练模块配置的参与训练的训练人员信息和训练任务信息,包括:
135.s1011:接收用户基于所述伞降训练模块选择的机型信息;
136.s1012:接收用户基于所述伞降训练模块选择的训练场景信息;
137.s1013:接收用户基于所述伞降训练模块选择的飞行路线信息;
138.s1014:接收用户基于所述伞降训练模块选择的落地点信息;
139.s1015:根据所述机型信息、训练场景信息、飞行路线信息和落地点信息生成相应的训练任务信息;
140.s1016:根据所述训练任务信息加载相应的仿真训练场景;
141.s1017:接收用户基于所述伞降训练模块输入的人员信息。
142.具体的如图7和图8所示,本发明实施例中机型信息可以使得用户选择直升机或者战斗机等,训练场景也可以选择平原或者城市或者森林等,不同的训练场景需要考核的内容也并不相同,在进行飞行路线选择的时候,用户可以随机指定路线,不同的路线有不同的考核目标。在进行具体降落点选择的时候,可以点击设置降落点,然后直接在地图上设置相应的降落点,然后可以根据提示在地图界面上选择降落点,若降落点不合要求,系统会给出提示原因,比如该地点位于高山处,请重新设置降落点,此时需要重新选择降落点。选择正确的降落点后,图标的颜色会发生变化,并且在地图上显示相应的航线。
143.除了上述内容,还可以设置场景数据,也即是降落点的场景数值,其可以改变t字布数据时场景内t字布会对应发生变化,改变降落点数据时场景内降落点会对应发生变化,起飞点距离与航线高度会改变对应场景内的航线,可以通过来更改当前窗口水平/垂直距离,场景也可以选择2d显示模式或者3d显示模式,甚至于还可以选择漫游模式。在这个过程中还可以进行场景修改,这个直接点击场景修改则可以实现对应的场景修正。通过上述步骤主要是获取到基础的场景数据。
144.s102:当所述训练人员信息与伞降技术模拟装置的数量不匹配时,生成相应的模拟人员信息,根据所述模拟人员信息以及训练人员信息生成相应用户端设备的启动参数;
145.在进行选择的时候可以选择多人训练,由于系统内伞降技术模拟装置具体的数量是固定的,但是为了方便用户安排训练人数,在进行设置的时候可以使得用户设置的开机数量小于等于系统内的伞降技术模拟装置的数量。比如当前伞降技术模拟装置的数量为6个;但是此时只有5个受训人员参加训练,那么则自动匹配一个模拟机器人来参与训练。在本发明实施例中采用模拟机器人能够更加方便的对受训人员进行计分操作;并且该模拟机器人也可以根据用户的设定了为整体受训增加难度,比如可以模拟特殊场景来帮助用户得到更好的训练效果。
146.更为优选的,所述伞降技术模拟方法还包括:
147.接收用户基于伞降训练模块配置伞降顺序信息,并将所述伞降顺序信息发送至各个用户端设备处以进行顺序确认。
148.通过设置跳伞顺序来使得用户可以依照实际情况来进行模拟。
149.s103:将所述启动参数以及训练任务信息发送至相应的用户端设备处以启动用户端设备,在用户端设备处基于所述训练任务信息加载相应的训练场景信息,并将所述训练场景信息发送至相应的vr智能眼镜以进行虚拟化显示;
150.跳伞训练根据参与人数的不同可以分为1-4人的多人模拟训练。提供多人同时进行的跳伞训练功能,不同跳伞人员通过佩戴vr头戴式显示器,可在场景中实时观察自己、同伴、伞、空中及地面场景。用户跳伞人员可通过vr智能眼镜来观看整个跳伞过程的实际状态,比如可以再乘坐飞机的时候观看到身边的其他跳伞人员,通过跳伞后可以观看地面以及周围的环境信息来进行实际跳伞模拟。
151.s104:接收通过用户端设备传输的伞降训练信息,所述伞降训练信息为在伞降技术模拟过程中受训人员在伞降技术模拟装置处的各种操作信息;
152.更为优选的,所述接收通过用户端设备传输的伞降训练信息,包括:
153.s1041:接收通过用户端设备传输的开伞时间信息;
154.s1042:接收通过用户端设备传输的落地位置信息;
155.s1043:根据所述落地位置信息确定相应的面向标识信息以及与其他受训人员的距离信息;
156.s1044:接收通过用户端设备传输着陆操作信息。
157.当用户在虚拟空间看到飞机的舱门打开或者是听到教练员的开始跳伞指令的时候,可以从跳台上进行模拟跳跃的操作,然后通过跳伞装置将受训人员悬在空中;以不断获取用户在这个期间的操作信息以及用户再虚拟空间的位置信息。通过解析用户在虚拟空间中的各项参数来确定对应的落地位置、与其他受训人员的距离信息等等以及通过伞降技术模拟装置接收用户的左摇杆和右摇杆的操作信息;通过上述信息来确定整个过程中的受训人员的操作信息。
158.s105:根据所述伞降训练信息确定相应的伞降训练结果。
159.具体的,根据所述开伞时间信息、面向标识信息、与其他受训人员的距离信息以及着陆操作信息确定相应受训人员的得分情况。
160.具体成绩展示如图9、图10和图11所示,对跳伞员跳伞训练考核过程进行考核评估,依据参训人员行动以及设备状态监测信息,对训练考核效果进行评价,实现全过程数据的记录、分析和管理。实现教员对跳伞员的教学测试成绩和训练成绩的跟踪管理,并提供训练考核成绩的查询、登记和统计等功能。跳伞员成绩统计:统计每个跳伞员的训练成绩、考核成绩进行统计和可视化展示。科目成绩统计:统计每个科目的训练成绩、考核成绩进行统计和可视化展示。展示统计后的训练情况,以图表的形式显示任务的进度。训练分析各知识点以及任务的使用次数,以周期及图表形式展现。可按具体船型、任务、知识点、节和章等显示考试结果等详细数据。
161.在本发明实施例中,系统提供了在演练时进行人工干预的设置接口,实现导调实时对演练的进程进行干预设置。在正常的训练过程中,教练员可以实时向训练场景中添加各种不同的事件来模拟各种突发情况,从而影响整个训练的进程。
162.更为优选的,所述伞降技术模拟方法还包括:
163.基于所述伞降训练模块将接收到的各个用户端设备传输的用户视野画面投屏至主显示装置处的第一显示区域;
164.基于所述伞降训练模块将训练过程中各个人员的伞降状态信息投屏至主显示装置处的第二显示区域;
165.响应于用户基于所述伞降训练模块的操作信息,将与受训人员相关的操作画面信息投屏至副显示装置处;所述操作画面信息包括设备编号、左摇杆信息、右摇杆信息和跳伞画面信息。在本发明实施例中还设置有观摩区域,通过设置观摩区域使得没有参加模拟的人员有固定的区域来进行跳伞观摩,通过显示装置能够实时的显示受训人员的跳伞状态。在进行设置的时候主显示装置设置于一侧,副显示装置设置于另一侧,并且其可以显示不同的内容,使得用户更加方便进行观看;在进行实施时,可以采用投影设备来进行显示。
166.在主显示装置处还分成了两个显示区域,在主显示装置处的一个显示区域显示各个用户vr眼镜回传的视频画面,并且在另一个显示区域显示了各个跳伞员在地图上的具体位置信息,使得教练员可以实时的了解跳伞员的训练过程,并且及时提醒用户是否偏航等。在副显示装置处还可以对用户的操作页面进行显示,比如将用户的左右遥感的力度信息在副显示装置处进行显示,这样使得教练员更加方便的对其他的跳伞员进行教学,比如当某个受训人员操作较好的时候,其可以直接将对应受训人员的操作页面在副显示装置处进行展示以方便其他的跳伞员来进行观看,或者当某个学院操作不好的时候,其可以直接将对应受训人员的操作页面进行展示,使得用户更加方便进行学习以避免在实际操作过程中也犯下同样的错误。在整体的操作过程中,
167.通过采用多种显示方式组合的形式,提高了教员对整体教学的把控能力,便于进行教学优化。
168.更为优选的,所述伞降技术模拟方法还包括:
169.将预先存储的示教讲解画面通过相应的用户端设备发送至vr智能眼镜处以进行演示教学讲解;
170.在演示教学讲解过程中,接收通过用户端设备传输的受训人员在伞降技术模拟装置处的受训操作信息,并将所述受训操作信息与预设操作信息进行匹配以确定是否操作一致,若不一致,则发送提示信息至vr智能眼镜以进行信息提醒。
171.通过设置展示与操作这样的方式,更加方便进行教学操作。
172.本发明实施例中的多人伞降模拟训练系统通过采用管理主机来集中控制多个用户端设备的工作状态,进而与伞降技术模拟装置和vr智能眼镜来进行信息交互;通过上述设定使得多名受训人员可以同时进行训练,大大提高了整体的训练效率。
173.实施例三
174.在实际情况下时,对于一个特殊情况的模拟也是非常必要的,比如恶劣天气或者城市内降落或者主伞未打开等,但是上述情况的模拟非常复杂,并且稍有不慎则会对人身产生伤害。基于此,本发明实施例公开了伞降特情模拟训练的方法、装置、电子设备及存储介质,通过配置特情状态以使得受训人员在跳伞模拟过程中模拟突发状态下的应对方式,通过采用vr场景模拟的方式,在保证安全的情况下,大大提升了模拟的真实性,提升用户的应对突发情况的能力。
175.请参阅图16,图16是本发明实施例公开的伞降特情模拟训练的方法的流程示意图。其中,本发明实施例所描述的方法的执行主体为由软件或/和硬件组成的执行主体,该执行主体可以通过有线或/和无线方式接收相关信息,并可以发送一定的指令。当然,其还可以具有一定的处理功能和存储功能。该执行主体可以控制多个设备,例如远程的物理服务器或云服务器以及相关软件,也可以是对某处安置的设备进行相关操作的本地主机或服务器以及相关软件等。在一些场景中,还可以控制多个存储设备,存储设备可以与设备放置于同一地方或不同地方。如图16所示,该基于伞降特情模拟训练的方法包括以下步骤:
176.s2101:接收用户配置的特情状态信息;
177.在本步骤主要是接收用户配置的特情状态,用户主要是在教员端主机上配置相应的特情状态,通过配置的特情状态来调取相应的特情内容。
178.更为优选的,所述特情状态信息包括无特情信息、主伞未开信息、垂直靠近信息和水平靠近信息中的一种或者多种。
179.由于跳伞训练本身存在一定的危险性,特别是当出现突发情况的时候危险系数会翻倍,处理不当会造成人身伤害;但是由于实际训练的较少,如果在实际中遇到特殊情况的时候,会使得跳伞人员产生更强的心理畏惧感,所以本发明实施例中通过在vr模拟系统中加载相应的特情程序使得受训人员能够真实的模拟出相应的特情状态进而使得受训人员更加熟悉突发状态。
180.本发明实施例中提及的主伞未开状态指的是在降落的时候主伞无法开启的状态,当遇到这种状态的时候,受训人员需要做的事情是打开备用伞;这种训练的必要性在于需要让受训人员知晓会有主伞未开这种状态,因为实际中很少会出现主伞未开的情况,所以需要通过训练来强化受训人员脑海中的印象。
181.除了上述主伞未开的情况,还会出现人员之间垂直靠近或者水平靠近的情况,如果处理不当,造成的损失更是无法计量的。
182.s2102:将所述特情状态信息与相应受训人员信息进行数据关联;
183.本发明实施例的情况可以应用于多人跳伞的场景中,当有多个人的时候,其可以采用多种配置模式;可以为所有人配置统一的特情情况,这样可以使得所有的人都有相同的特情配置,能够实现统一训练的目的。但是在进行具体实施的时候,除了上述统一配置之外,还可以针对不同的人员来进行不同的配置,这样能够实现个性化的特情配置,大大提升了训练的针对性。
184.s2103:将所述特情状态信息发送至相应受训人员处以在受训人员端加载相应的特情程序,并获取受训人员在特情发生过程中受训人员的操作信息;
185.在本步骤中主要是将特情状态信息,比如主伞未开、垂直靠近或者水平靠近等信息发送至受训人员端,然后在受训人员的vr智能眼镜处加载相应的程序,由于特情程序主要是为了提升受训人员遇到特殊情况的反应与操作,所以需要获取到在vr智能眼镜中特情发生时,受训人员的操作信息;只有获取到操作信息才能够判断用户的操作情况。
186.更为优选的,所述将所述特情状态信息发送至相应受训人员处以在受训人员端加载相应的特情程序,包括:
187.将主伞未开信息发送至受训人员处以在受训人员端加载相应的特情程序,所述特情程序为在设定时间内主伞无法开启或者在本次模拟训练中主伞处于失效状态。
188.本发明实施例中提及的主伞未开状态指的是在降落的时候主伞无法开启的状态,当遇到这种状态的时候,受训人员需要做的事情是打开备用伞;这种训练的必要性在于需要让受训人员知晓会有主伞未开这种状态,因为实际中很少会出现主伞未开的情况,所以需要通过训练来强化受训人员脑海中的印象,模拟主伞失效场景,迫使用户启动副伞以实现安全跳伞的操作。
189.更为优选的,图18是本发明实施例公开的接近特情设置的具体流程示意图,如图18所示,所述将所述特情状态信息发送至相应受训人员处以在受训人员端加载相应的特情程序,包括:
190.s21031:当所述特情状态信息为垂直靠近信息时,生成相应的第一模拟人员;
191.s21032:在跳伞模拟过程中,基于相应受训人员的位置信息,所述第一模拟人员以垂直于受训人员运动的方向向其靠近;
192.s21033:当所述特情状态信息为水平靠近信息时,生成相应的第二模拟人员;
193.s21034:在跳伞模拟过程中,基于相应受训人员的位置信息,所述第二模拟人员以水平于受训人员运动的方向向其靠近。
194.除了上述主伞开启状态的设置之外,还可以有垂直靠近或者是水平靠近的状态设置方式,图19是本发明实施例公开的垂直接近的场景示意图;图20是本发明实施例公开的水平接近的场景示意图;如图19和图20所示,这里的垂直靠近跟水平靠近的设置方式具体为两个跳伞人员在空间的位置关系;其中垂直靠近具体为两个跳伞人员以一上一下的方式在相互接近,当两个人接触的时候,其所操作的跳伞也会相互接近,进而产生危险;其中水平靠近具体为两个跳伞人员以一左一右的方式在相互接近,当两个人接触的时候,其所操作的跳伞也会相互接近,两者时间的绳子可能会发生缠绕进而产生危险。在进行具体实施的时候,可以通过配置两个跳伞员相互靠近,比如同时选择两个跳伞员的特情状态,进而选择两个跳伞员都出现垂直接近的情况;或者更为优选的,如本发明实施例中所采用的生成模拟机器人,然后模拟机器人来进行接近,通过设置模拟机器人使得整体的设置更加的方便与更加贴近真实,设置模拟机器人的时候,可以直接根据相应受训人员的位置信息来生成对应的模拟人员,然后进行接近处理。
195.s2104:根据所述操作信息确定在特情状态下受训人员的操作得分。
196.通过在特情发生过程中,检测受训人员的操作并参考评价标准来为其进行得分判定;并且在受训人员进行具体操作的时候,还可以设置如下视频采集方式:可以对整个过程进行视频录制操作,当受训人员的得分超过设定数值的时候,删除对应的视频内容;当受训人员的得分小于设定数字的时候,则保存对应的视频;这样能够使得用户更加的方便进行学习操作,能够知晓自己在具体操作过程中所犯的错误。
197.更为优选的,图17是本发明实施例公开的天气特情设置的具体流程示意图,如图17所示,所述特情模拟训练方法还包括:
198.s2105:接收用户配置的气象信息;所述气象信息为晴天、雨天、雪天或者风天中的一种;
199.s2106:将所述特情状态信息发送至相应受训人员处以在受训人员端加载相应的气象程序以模拟不同气象条件,在不同的气象条件下合成风速、合成风向、地面风速、地面风向和跳伞时间各不相同。
200.特情情况除了上述的设备情况之外,在具体操作的时候,还可以配置相应的天气情况,一般情况下,不会在大雨天或者大雪天进行跳伞操作,但是遇到紧急情况的时候,也必须在恶劣的天气环境下来进行跳伞操作。通过在训练中感受不同天气条件下的气象来达到训练的目的。
201.更为优选的,所述接收用户配置的气象信息之后,还包括:
202.当检测到所述气象信息为雨天、雪天或者风天中的一种时,调取相应的提示页面来对受训人员进行信息提示以使受训人员在vr智能眼镜处观看跳伞注意事项提示。
203.在设置为异常天气的时候,可以通过设置提示页面来对受训人员进行信息提示,使得受训人员有一定的心理准备,便于受训人员在训练过程中进行跳伞的调节。
204.更为优选的,所述特情模拟训练方法还包括:
205.响应于用户在设置模块配置的信息内容以生成自定训练场景信息,所述自定训练场景信息包括合成风向、合成风速、地面风向、地面风速、跳伞时间和场景持续时间;
206.将所述自动训练场景信息发送至相应受训人员处以在受训人员端加载相应的训练程序以模拟不同场景条件。
207.除了上述预设的天气参数之外,用户还可以自行配置相应具体的参数,使得整体的参数调节设置的能力更高,给教练员提供更高的自由度来进行操作。
208.本发明实施例中通过配置特情状态以使得受训人员在跳伞模拟过程中模拟突发状态下的应对方式,通过采用vr场景模拟的方式,在保证安全的情况下,大大提升了模拟的真实性,提升用户的应对突发情况的处置能力。
209.实施例四
210.请参阅图21,图21是本发明实施例公开的多人伞降技术模拟装置的结构示意图。如图21所示,该多人伞降技术模拟装置可以包括:
211.配置模块401:响应于用户基于所述伞降训练模块配置的参与训练的训练人员信息和训练任务信息;
212.匹配模块402:当所述训练人员信息与伞降技术模拟装置的数量不匹配时,生成相应的模拟人员信息,根据所述模拟人员信息以及训练人员信息生成相应用户端设备的启动参数;
213.加载模块403:将所述启动参数以及训练任务信息发送至相应的户端设备处以启动用户端设备,在用户端设备处基于所述训练任务信息加载相应的训练场景信息,并将所述训练场景信息发送至相应的vr智能眼镜以进行虚拟化显示;
214.接收模块404:接收通过用户端设备传输的伞降训练信息,所述伞降训练信息为在伞降技术模拟过程中受训人员在伞降技术模拟装置处的各种操作信息;
215.结果显示模块405:根据所述伞降训练信息确定相应的伞降训练结果。
216.本发明实施例中的多人伞降技术模拟伞降模拟训练系统通过采用管理主机来集中控制多个用户端设备的工作状态,进而与伞降技术模拟装置和vr智能眼镜来进行信息交互;通过上述设定使得多名受训人员可以同时进行训练,大大提高了整体的训练效率。
217.实施例五
218.请参阅图22,图22是本发明实施例公开的一种电子设备的结构示意图。电子设备可以是计算机以及服务器等,当然,在一定情况下,还可以是手机、平板电脑以及监控终端
等智能设备,以及具有处理功能的图像采集装置。如图22 所示,该电子设备可以包括:
219.存储有可执行程序代码的存储器510;
220.与存储器510耦合的处理器520;
221.其中,处理器520调用存储器510中存储的可执行程序代码,执行实施例一中的多人伞降技术模拟方法中的部分或全部步骤。
222.本发明实施例公开一种计算机可读存储介质,其存储计算机程序,其中,该计算机程序使得计算机执行实施例一中的多人伞降技术模拟方法中的部分或全部步骤。
223.本发明实施例还公开一种计算机程序产品,其中,当计算机程序产品在计算机上运行时,使得计算机执行实施例一中的多人伞降技术模拟方法中的部分或全部步骤。
224.本发明实施例还公开一种应用发布平台,其中,应用发布平台用于发布计算机程序产品,其中,当计算机程序产品在计算机上运行时,使得计算机执行实施例一中的多人伞降技术模拟方法中的部分或全部步骤。
225.在本发明的各种实施例中,应理解,所述各过程的序号的大小并不意味着执行顺序的必然先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
226.所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物单元,即可位于一个地方,或者也可以分布到多个网络单元上。可根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。
227.另外,在本发明各实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。所述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
228.所述集成的单元若以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可获取的存储器中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或者部分,可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储器中,包括若干请求用以使得一台计算机设备(可以为个人计算机、服务器或者网络设备等,具体可以是计算机设备中的处理器)执行本发明的各个实施例所述方法的部分或全部步骤。
229.在本发明所提供的实施例中,应理解,“与a对应的b”表示b与a相关联,根据a可以确定b。但还应理解,根据a确定b并不意味着仅仅根据a确定b,还可以根据a和/或其他信息确定b。
230.本领域普通技术人员可以理解所述实施例的各种方法中的部分或全部步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质包括只读存储器(read-only memory,rom)、随机存储器(random access memory,ram)、可编程只读存储器(programmable read-onlymemory,prom)、可擦除可编程只读存储器(erasable programmable read-onlymemory,eprom)、一次可编程只读存储器(one-time programmable read-onlymemory,otprom)、电子抹除式可复写只读存储器(electrically-erasableprogrammable read-only memory,eeprom)、只读光盘(compact discread-only memory,cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者能够用于携带或存储数据的计算机可读的任何其他介质。
231.以上对本发明实施例公开的多人伞降技术模拟方法、装置、电子设备及存储介质进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1