基于工业互联网的智能弹珠实训设备及方法与流程
1.本发明涉及工业互联网和智能弹珠等实训技术领域,具体为基于工业互联网的智能弹珠实训设备及方法。
背景技术:
2.工业互联网技术是新一代信息通信技术与工业经济深度融合的产物,随着网络技术的迅速发展,计算机网络及应用已经渗透到各个行业和领域当中;目前,各行业对于网络的需求也越来越多样化,对于工业互联网提供者而言,缺少大量懂工业互联网研发、服务、管理的人;对于工业互联网使用者而言,同样缺少懂工业互联网使用、运维、管理的人;工业互联网产业发展对技能人才有更高的要求,是具有新一代信息通讯技术和工业领域专业知识或专门技能的人才,当前对于工业互联网人才培养处于摸索阶段,且工业互联网技能相关培训产品不是很完善,不能将信息技术与工业控制技术有效融合,不利于教学推广。
技术实现要素:
3.针对现有技术的不足,本发明提供了基于工业互联网的智能弹珠实训设备及方法,解决了工业互联网技能相关培训产品不够完善,不能将信息技术与工业控制技术有效融合,不利于教学推广的问题。
4.为实现以上目的,本发明通过以下技术方案予以实现:基于工业互联网的智能弹珠实训设备及方法,包括实训台、智能弹珠模型、工业互联网软件平台三部分,所述实训台上设置有智能弹珠模型,且该实训台的中间位置分别设置有plc模块与智能网关,智能网关安装于plc模块的右侧位置,实训台的上端还设置有若干台实训电脑,所述电脑内安装有工业互联网软件平台。
5.所述智能弹珠模型包括有安装底板,所述安装底板上设置有控制按钮、滑道组件、io模块、智能阀岛、摩天轮上料机构、阶梯传送机构和旋转检测机构。
6.所述实训台的台面中间设置有控制机箱,所述控制机箱内设置有plc模块、智能网关模块和电源模块,所述控制机箱的台面中间设置有智能弹珠模型。
7.所述工业互联网软件平台由pc端应用软件、移动终端的app软件、服务器端后台系统组成。
8.优选的,所述滑道组件包括有滑槽框,所述滑槽框底部四周设置有若干条支撑杆,所述滑槽框的内侧后端中部设置有滑道板,所述滑槽框的顶端前端中部转动连接有拨板,所述拨板的转轴前端固定连接在连杆一端,所述连杆的另一端设置有镂空槽,所述滑槽框的底端前侧固定连接有安装板,所述安装板的一侧固定连接有第一气缸,所述第一气缸的杆体末端固定连接在连接件的底端,所述连接件的顶端与镂空槽滑动连接。
9.优选的,所述摩天轮上料机构包括有支撑架,所述支撑架的底端左右侧均固定连接有底座,所述支撑架的前端台面中间设置有出料槽,所述支撑架的前端中下部固定连接有第一电机,所述支撑架的前端中固定连接有变速器,所述变速器的输出端贯穿支撑架的
中部并与第一连接轴的中部固定连接,所述第一连接轴固定连接在摩天轮转盘的中部,所述摩天轮转盘的后侧中部四周等距设置有若干个孔洞,所述第一电机的输出端与变速器的输入端固定连接。
10.优选的,所述阶梯传送机构包括有底板,所述底板的左端固定连接有端板,所述端板的右侧固定连接在两个第二气缸的缸体末端,所述第二气缸的杆体前端均固定连接在导向块的左端,所述导向块的顶部前后侧均交替设置有斜面滑道,所述底板的顶部右侧前后端均固定连接有支杆,所述支杆的顶端分别固定连接在定位块的底端前后侧,所述定位块上等距竖向滑动连接有四个滑动杆,所述滑动杆的顶端均固定连接有阶梯块,所述滑动杆的底端均转动连接有滚轮,所述滚轮分别与对应的斜面滑道接触,阶梯块的左侧均通过拉力弹簧与定位块的左侧相连。
11.优选的,所述旋转检测机构包括有顶板,所述顶板的底端四周等距固定连接有四个支撑柱,两侧所述支撑柱的底端分别固定连接在安装座的顶部两端,所述顶板的底端中部固定连接有安装架,所述安装架的底端中部固定连接有第二电机,所述顶板的顶端四周设置有围板,所述围板的内部设置有转板,所述转板的顶端中部固定连接有第二连接轴,所述第二连接轴贯穿顶板的中部并与第二电机的输出端固定连接,所述转板的四周等距设置有若干个槽口,所述顶板的中部一侧设置有输送口,所述输送口与槽口对应,所述顶板的一侧固定连接有固定架,所述固定架上依次设置有颜色传感器和原点传感器,所述围板的一侧设置有豁口。
12.优选的,所述旋转检测机构位于滑道组件的内侧前端。
13.优选的,所述阶梯传送机构位于滑道组件的内侧中部。
14.优选的,所述摩天轮上料机构位于滑道组件的内侧后中部。
15.优选的,所述输送口位于拨板的上方,前端所述阶梯块位于围板豁口的后方,后端所述阶梯块位于出料槽的前端,所述滑道板的前端与孔洞对应,所述io模块、控制按钮、智能阀岛、智能网关模块、第一电机、第二电机、第一气缸和第二气缸电性连接。
16.优选的,所述电脑、plc模块、电源模块和智能弹珠模型电性连接。
17.工作原理:通过智能弹珠模型上的io模块连接在实训台上的plc模块,plc模块通过智能网关模块连接在工业互联网平台,实训台面中间有一个控制机箱,智能网关模块、plc模块与电源模块分别安装在控制机箱上,每个工位分别有一组智能网关模块、plc模块与电源模块,按照工位进行分组实训;智能弹珠模型上的智能阀岛与io模块只需调节转换开关就可以适用各种通讯协议,也可以单独连接plc模块来实现实训,使用实训电脑编写好plc程序,然后下载程序进入plc模块,按启动按钮就可以使模型动作,首先将两种颜色的弹珠放置在摩天轮上料机构前的滑道板上,启动模型,摩天轮上料机构的第一电机动作带动摩天轮转盘旋转,将弹珠往上带动再从出料槽流出,然后流入到阶梯传送的阶梯块上,通过气缸的动作,将弹珠一个一个的提升到转板上,然后转板带动弹珠旋转并流经颜色传感器下方,判定弹珠的颜色,滑道上的拨板根据检测出来的弹珠颜色来动作,使得落下的不同颜色弹珠往滑道的两个方向流动,最终汇入摩天轮上料机构前的滑道板上,如此循环。
18.本发明提供了基于工业互联网的智能弹珠实训设备及方法。具备以下有益效果:
19.本发明通过将两种颜色的弹珠放置在摩天轮上料机构前的滑道板上,启动模型,摩天轮上料机构的第一电机动作带动摩天轮转盘旋转,将弹珠往上带动再从出料槽流出,
然后流入到阶梯传送的阶梯块上,通过气缸的动作,将弹珠一个一个的提升到转板上,然后转板带动弹珠旋转并流经颜色传感器下方,判定弹珠的颜色,滑道上的拨板根据检测出来的弹珠颜色来动作,使得落下的不同颜色弹珠往滑道的两个方向流动,最终汇入摩天轮上料机构前的滑道板上,如此循环,通过分布式总线io模块、智能网关模块、plc模块、工业互联网平台搭建网络架构,同时在平台上开发自己喜好的app软件,使得学生更容易接收新技术、新知识,通过智能弹珠实训设备这一载体,它的观赏性以及趣味性比较强,更能激发学生的学习主动性。
附图说明
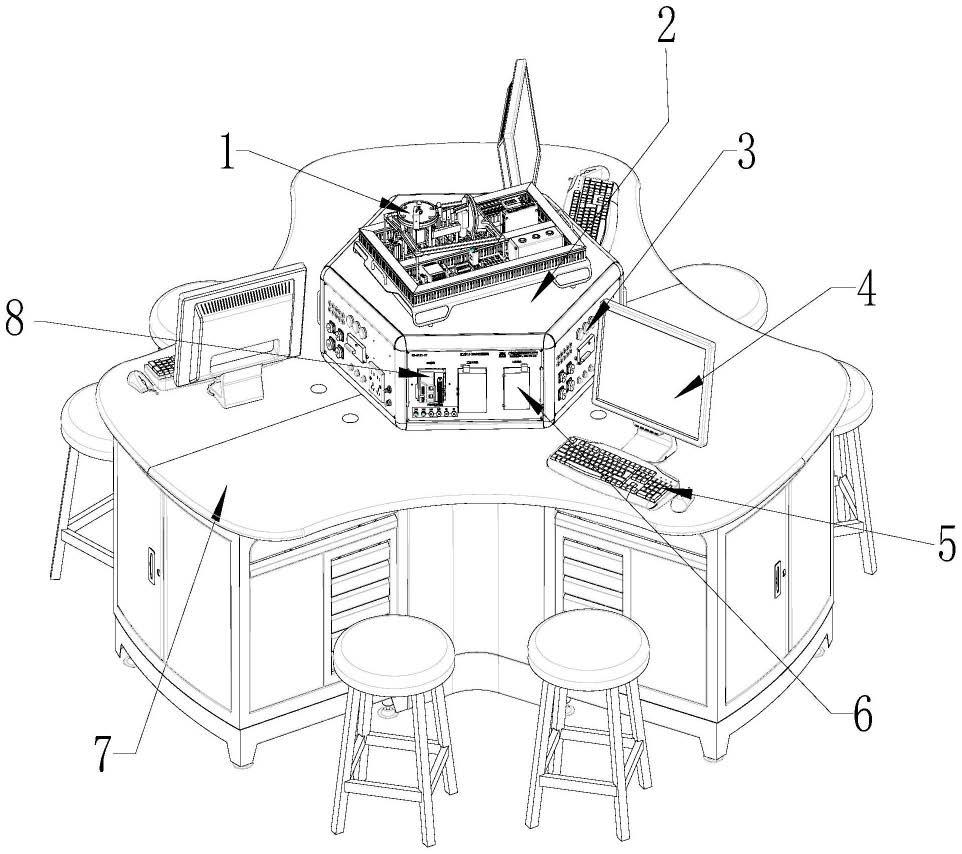
20.图1为本发明的整体结构示意图;
21.图2为本发明的智能弹珠模型结构示意图;
22.图3为本发明的摩天轮上料机构侧视结构示意图;
23.图4为本发明的摩天轮上料机构后视结构示意图;
24.图5为本发明的阶梯传送机构的立体结构示意图;
25.图6为本发明的滑道组件的立体结构示意图;
26.图7为本发明的滑道组件侧视结构示意图;
27.图8为本发明的滑道组件主视结构示意图;
28.图9为本发明的旋转检测机构的立体结构示意图;
29.图10为本发明的旋转检测机构的侧视结构示意图;
30.图11为本发明的导向块的结构示意图。
31.其中,1、智能弹珠模型;2、控制机箱;3、电源模块;4、实训电脑;5、工业互利网软件平台;6、智能网关模块;7、实训台;8、plc模块;110、安装底板;120、控制按钮;130、滑道组件;1301、滑槽框;1302、滑道板;1303、支撑杆;1304、底座;1305、第一气缸;1306、安装板;1307、连杆;1308、拨板;1309、连接件;1310、镂空槽;140、io模块;150、智能阀岛;160、摩天轮上料机构;1601、底座;1602、支撑架;1603、摩天轮转盘;1604、第一连接轴;1605、第一电机;1606、出料槽;1607、变速器;1608、孔洞;170、阶梯传送机构;1701、底板;1702、端板;1703、第二气缸;1704、导向块;1705、支杆;1706、滚轮;1707、定位块;1708、滑动杆;1709、阶梯块;1710、弹珠;1711、斜面滑道;1712、拉力弹簧;180、旋转检测机构;1801、顶板;1802、围板;1803、固定架;1804、第二连接轴;1805、转板;1806、第二电机;1807、支撑柱;1808、原点传感器;1809、颜色传感器;1810、安装座;1811、安装架;1812、槽口;1813、输送口。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例:
34.如图1-2所示,本发明实施例提供基于工业互联网的智能弹珠实训设备及方法,包括实训台7,实训台7的顶端四周等距设置有若干台实训电脑4,实训台7的台面中间设置有
控制机箱2,控制机箱2内设置有plc模块8、智能网关模块6和电源模块3,控制机箱2的台面中间设置有智能弹珠模型1。
35.智能弹珠模型1包括有安装底板110,安装底板110的内部设置有控制按钮120、滑道组件130、io模块140、智能阀岛150、摩天轮上料机构160、阶梯传送机构170和旋转检测机构180。
36.安装底板110造型美观,它设计网孔,便于各种零部件的拆装,使得实训人员按照自己的思路设计布局;控制按钮120安装在安装底板110上,它用来控制该模型的启动、复位、停止;io模块140安装在安装底板上,它是一款分布式总线io模块;智能阀岛150是一款带现场总线是阀岛,极大的简化了电磁阀的布线布管,它安装在安装底板110上。
37.如图3-4所示,摩天轮上料机构160包括有支撑架1602,支撑架1602的底端左右侧均固定连接有底座1601,支撑架1602的前端台面中间设置有出料槽1606,支撑架1602的前端中下部固定连接有第一电机1605,支撑架1602的前端中固定连接有变速器1607,变速器1607的输出端贯穿支撑架1602的中部并与第一连接轴1604的中部固定连接,第一连接轴1604固定连接在摩天轮转盘1603的中部,摩天轮转盘1603的后侧中部四周等距设置有若干个孔洞1608,第一电机1605的输出端与变速器1607的输入端固定连接。
38.支撑架1602的顶部开有一u型槽,该u型槽带有锥度,与出料槽1606基本保持同一直线;摩天轮转板设计有孔洞1608,孔的形状是锥形的,弹珠可以轻松进入这些锥孔,随着摩天轮转板1603转动而带到上方,然后从支撑架1602的u型槽流出到出料槽1606,由于出料槽1606倾斜作用继续使得弹珠流动。
39.如图5和图11所示,阶梯传送机构170包括有底板1701,底板1701的左端固定连接有端板1702,端板1702的右侧固定连接在两个第二气缸1703的缸体末端,第二气缸1703的杆体前端均固定连接在导向块1704的左端,导向块1704的顶部前后侧均交替设置有斜面滑道1711,底板1701的顶部右侧前后端均固定连接有支杆1705,支杆1705的顶端分别固定连接在定位块1707的底端前后侧,定位块1707上等距竖向滑动连接有四个滑动杆1708,滑动杆1708的顶端均固定连接有阶梯块1709,滑动杆1708的底端均转动连接有滚轮1706,滚轮1706分别与对应的斜面滑道1711接触,阶梯块1709的左侧均通过拉力弹簧1712与定位块1707的左侧相连。
40.阶梯块1709顶部设计有斜槽,弹珠1710在重力作用下会沿着斜槽滚动,每个阶梯块1709能容纳一个弹珠1710;阶梯块1709与定位块1707之间连接有拉力弹簧1712,使得阶梯块1709有一个向下的力;当第二气缸1703动作时带动导向块1704动作,滑动杆1708上的滚轮1706沿着导向块的斜面滑道1711滚动,从而使得滑动杆1708上下动作,因导向块1704两侧有反向对称的斜面滑道1711,所以一个第二气缸动作时,会有两个滑动杆1708上下动作,当两个阶梯块1709的斜面滑道1711一致时,弹珠1710就会从一个阶梯块1709滚到另一个阶梯块1709,当连续动作时,弹珠1710就能从第一个阶梯块1709传送到第四个阶梯块1709,类似走阶梯上去一样。
41.如图6-8所示,滑道组件130包括有滑槽框1301,滑槽框1301底部四周设置有若干条支撑杆1303,滑槽框1301的内侧后端中部设置有滑道板1302,滑槽框1301的顶端前端中部转动连接有拨板1308,拨板1308的转轴前端固定连接在连杆1307一端,连杆1307的另一端设置有镂空槽1310,滑槽框1301的底端前侧固定连接有安装板1306,安装板1306的一侧
固定连接有第一气缸1305,第一气缸1305的杆体末端固定连接在连接件1309的底端,连接件1309的顶端与镂空槽1310滑动连接。
42.滑道组件130从顶部往下类似一个矩形,它是形成一个回路,弹珠1710能够从两边滚落到最低处,第一气缸1305的活塞杆上下活动时,在连杆1307的作用下使得拨板1308左右摆动。
43.如图9-10所示,旋转检测机构180包括有顶板1801,顶板1801的底端四周等距固定连接有四个支撑柱1807,两侧支撑柱1807的底端分别固定连接在安装座1810的顶部两端,顶板1801的底端中部固定连接有安装架1811,安装架1811的底端中部固定连接有第二电机1806,顶板1801的顶端四周设置有围板1802,围板1802的内部设置有转板1805,转板1805的顶端中部固定连接有第二连接轴1804,第二连接轴1804贯穿顶板1801的中部并与第二电机1806的输出端固定连接,转板1805的四周等距设置有若干个槽口1812,顶板1801的中部一侧设置有输送口1813,输送口1813与槽口1812对应,顶板1801的一侧固定连接有固定架1803,固定架1803上依次设置有颜色传感器1809和原点传感器1808,围板1802的一侧设置有豁口。
44.在围板1802与转板1805的作用下,将弹珠1710带动围绕围板1802内圈转动,转板1805设计有槽口1812,转板1805带动弹珠1710可在顶板1801的输送口1813落下,颜色传感器1809与原点传感器1808安装在固定架1803上;当转板1805带动弹珠1710经过颜色传感器1809下方时,颜色传感器1809就能判断下方的弹珠是什么颜色,原点传感器1808的作用是模型设备启动复位时,使得转板1805的槽口1812对准围板1802的豁口,这样使得弹珠1710能够顺利进入转板的槽口1812。
45.旋转检测机构180位于滑道组件130的内侧前端,阶梯传送机构170位于滑道组件130的内侧中部,摩天轮上料机构160位于滑道组件130的内侧后中部,输送口1813位于拨板1308的上方,前端阶梯块1709位于围板1802豁口的后方,后端阶梯块1709位于出料槽1606的前端,滑道板1302的前端与孔洞1608对应,io模块140、控制按钮120、智能阀岛150、智能网关模块5、第一电机1605、第二电机1806、第一气缸1305和第二气缸1703电性连接,电脑4、plc模块6、电源模块3和智能弹珠实训设备1电性连接。
46.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1