基于VR技术的光电侦察车模拟训练装置及方法
基于vr技术的光电侦察车模拟训练装置及方法
技术领域
1.本发明涉及光电侦察车模拟训练。
背景技术:
2.光电侦察车以轮式或履带式车辆底盘为移动载体,运用光电转塔、ccd成像设备、激光测距机等设备以及光电探测及视频跟踪技术,实现在野战场地对地面及空中目标进行搜索、侦察与跟踪,大量应用于敌情侦察预警与战场态势感知。与传统的雷达探测方式相比,具有抗电磁干扰能力强、测量精度高等特点,在现代战争中发挥重要作用。
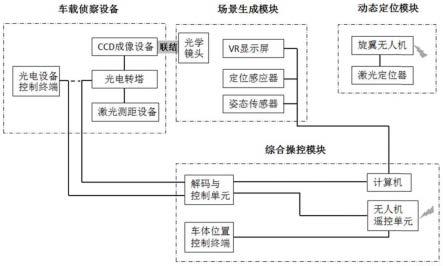
3.光电侦察车上的主要侦察设备如图1的“车载侦察设备”所示,由光电设备控制终端、光电转塔、ccd成像设备、激光测距设备组成。其中ccd成像设备、激光测距设备安装于光电转塔上,三者的轴线方向保持一致(方位角、高低角相同)。光电设备控制终端及光电转塔的外部有rs232接口,通过电缆连接。使用人员操作光电设备控制终端,通过rs232串口电缆传输操作指令,实现对光电转塔的方位、俯仰、升降运动控制以及对ccd成像设备、激光测距设备的各种操作控制。
4.通常在开展光电侦察车的模拟训练时,需要将光电侦察车驾驶到野外场地,同时需要配备地面或空中的静止或机动目标,对训练场地及陪试目标的要求很高,不仅耗资巨大,还受天气、温度等外界环境影响,实施难度大。而且在实际环境中,难以满足多种气候环境、多种目标类型及运动方式的复杂训练要求。此外,对于同一训练场景难以完全复现,从而无法开展针对性的多次反复训练。
技术实现要素:
5.本发明提供一种基于vr技术的光电侦察车模拟训练装置及方法,实现在不开动光电侦察车的条件下,开展多种野外场景下的光电侦察模拟训练。
6.第一方面,提供一种基于vr技术的光电侦察车模拟训练装置,所述光电侦察车包括光电设备控制终端、光电转塔、ccd成像设备和激光测距设备,所述ccd成像设备和所述激光测距设备安装于所述光电转塔上,三者的轴线方向保持一致,所述模拟训练装置包括综合操控模块、场景生成模块和动态定位模块,所述综合操控模块包括解码与控制单元、计算机、车体位置控制终端和无人机遥控单元,所述场景生成模块包括光学镜头、vr显示屏、定位感应器和姿态传感器,所述动态定位模块包括无人机和设置在所述无人机上的激光定位器,所述场景生成模块安装在所述ccd成像设备上,使所述光学镜头的轴线与所述ccd成像设备的光学系统轴线保持一致。
7.所述无人机接收所述无人机遥控单元发送的遥控指令,并根据所述遥控指令进行相应运动。
8.所述激光定位器按特定的周期向所述定位传感器发射激光同步信号及扫描信号。
9.所述定位感应器接收所述激光定位器发出的所述激光同步信号及所述扫描信号,根据所述扫描信号的到达时间和角度计算出所述场景生成模块的空间位置信息,并将所述
空间位置信息传输给所述计算机。
10.所述姿态传感器实时测量所述场景生成模块的姿态信息,并将所述姿态信息传输给所述计算机。
11.所述计算机上配置有多种用于侦察训练的虚拟场景,所述计算机接收所述定位感应器发送的所述空间位置信息和所述姿态传感器发送的所述姿态信息,并将所述空间位置信息和所述姿态信息转化为虚拟场景中对应的视点位置和观察方向,并生成从该视点位置观察到的虚拟场景画面,将所述虚拟场景画面传输给所述vr显示屏。
12.所述vr显示屏接收所述计算机输出的所述虚拟场景画面,并在其液晶显示屏上显示。
13.所述光学镜头将所述液晶显示屏的显示画面进行光学变换,模拟远处的场景画面。
14.所述解码与控制单元被配置为对所述光电设备控制终端的输出指令进行解码和识别,其中将针对所述光电转塔的方位角调整指令、俯仰角调整指令、目标跟踪指令、针对所述ccd成像设备的变倍调节指令、变焦调节指令、亮度调节指令、对比度调节指令、目标选取指令中的一种或多种指令发送给所述光电转塔,将针对所述光电转塔的高低升降操作指令发送给所述无人机遥控单元。
15.所述车体位置控制终端将模拟车体移动操作指令传输给所述无人机遥控单元。
16.所述无人机遥控单元接收所述解码与控制单元发送的针对所述光电转塔的所述高低升降操作指令和所述车体位置控制终端发送的所述模拟车体移动操作指令,并将所述高低升降操作指令和所述模拟车体移动操作指令转化为所述遥控指令,发送给所述无人机,使所述无人机进行相应运动。
17.在一些示例中,所述解码与控制单元被配置为将所述光电设备控制终端输出的针对所述激光测距设备的测距操作指令发送给所述计算机,所述计算机计算出当前虚拟场景画面中心点所对应目标与视点位置之间的距离数据,所述距离数据经过所述解码与控制单元发送给所述光电设备控制终端。
18.在一些示例中,所述距离数据经过设定时长的延时后发送给所述光电设备控制终端。
19.在一些示例中,所述的姿态信息包括:所述场景生成模块相对于设定方向的方位角度信息,以及所述场景生成模块相对于水平面的俯仰角度信息。
20.在一些示例中,所述光学镜头将场景画面尺寸与所述ccd成像设备的光学视场范围进行匹配。
21.在一些示例中,所述光电设备控制终端输出升高所述光电转塔的指令时,所述无人机执行下降运动;所述光电设备控制终端输出降低所述光电转塔的指令时,所述无人机降低执行上升运动。
22.在一些示例中,所述车体位置控制终端发送向前、向后、向左和向右移动操作指令时,所述无人机相对于车头方向分别进行执行向后、向前、向右和向左移动。
23.第二方面,提供一种光电侦察车模拟训练方法,利用所述的基于vr技术的光电侦察车模拟训练装置进行训练,所述方法包括:将光电侦察车停于地面,车头朝向设定方向;在光电侦察车内操作所述光电设备控制终端,将所述光电转塔的高度调整到设定高度,将
所述光电转塔的高低角调整到设定密位,将所述光电转塔的方位角调整到设定方向;操作所述车体位置控制终端,使所述无人机悬停到训练初始位置,机头朝向光电侦察车车头的反方向;操作计算机选择一种虚拟场景进行训练数据初始化;在光电侦察车内通过操作所述光电设备控制终端和所述车体位置控制终端开展光电侦察模拟训练。
24.模拟训练内容包括以下一种或多种的组合:观察从所述ccd成像设备传输的模拟场景的图像;进行所述光电转塔的方位角调整和高低角调整;进行所述光电转塔的升降操作。通过操作所述车体位置控制终端,进行光电侦察车的位置移动模拟操作;对所述激光测距设备进行测距操作;针对所述光电转塔的目标跟踪操作;针对所述ccd成像设备的变倍调节操作、变焦调节操作、亮度调节操作、对比度调节操作和目标选取操作。
25.本发明具有以下有益效果:
26.1、采用vr显示屏及光学镜头为ccd成像设备提供训练场景画面,开展训练时不需要将光电侦察车驾驶到野外场地使用真实场景,摆脱常规训练方法对野外试验环境的依赖。
27.2、采用计算机编辑及存储虚拟场景及模型,便于根据需要提供多种气候条件、多种复杂背景、多种目标类型的训练场景,有效降低训练成本。而且训练场景可以完全复现,便于使用人员开展针对性的反复强化训练。
28.3、本方法的使用人员基于光电侦察车的实际工位和光电设备控制终端开展训练,与传统的虚拟手柄操作方式相比,具有更强的真实感和实用性。
29.4、本方法采用vr技术,采用姿态传感器实时采集光电转塔的姿态数据,计算机根据姿态数据计算场景画面,并通过vr显示器及光学镜头反馈给ccd成像设备,实现了侦察场景画面与光电转塔运动的同步。
30.5、常规vr实现方法是将激光定位器位置固定,通过改变定位感应器的位置实现虚拟视点的位置变化。本方法运用相对运动原理,在光电侦察车及定位感应器保持原地位置不动的条件下,通过移动激光定位器,实现虚拟视点的位置变化,模拟光电侦察车的位置移动;同理,在光电转塔保持高度不变的条件下,模拟光电转塔的高度升降,有利于减少训练安全事故。
31.6、本方法利用激光定位器质量较轻、体积较小的特点,采用旋翼无人机搭载激光定位器进行运动,与传统的使用导轨或支架的方式相比,激光定位器的移动范围更大、悬停位置更灵活。
32.7、采用解码与控制单元实现对测距操作指令的拦截,采用计算机返回目标距离数据,可减少激光发射次数,延长激光器使用寿命,有利于避免激光对人员的伤害。此外,采用软件延时模拟激光测距的时间延迟,便于模拟真实测距效果。
附图说明
33.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单的介绍。
34.图1为本发明一实施例提供的基于vr技术的光电侦察车模拟训练装置框图。
35.图2为本发明一实施例提供的基于vr技术的光电侦察车模拟训练实现原理示意图。
36.图3为本发明一实施例提供的基于vr技术的光电侦察车模拟训练方法流程图。
具体实施方式
37.图1、图2示出了一种基于vr技术的光电侦察车模拟训练装置框图和实现原理示意图,该装置包括综合操控模块、场景生成模块和动态定位模块。
38.综合操控模块包括解码与控制单元、计算机、车体位置控制终端、无人机遥控单元。场景生成模块包括光学镜头、vr显示屏、定位感应器、姿态传感器。动态定位模块包括旋翼无人机、激光定位器。场景生成模块安装在ccd成像设备上,其光学镜头的轴线与ccd成像设备的光学系统轴线保持一致。
39.旋翼无人机搭载激光定位器。旋翼无人机通过无线方式接收无人机遥控单元发送的遥控指令,并根据遥控指令进行相应运动。所述的相应运动,包括空中悬停、上升、下降、以及水平方向的运动。
40.激光定位器按特定的周期向场景生成模块的定位传感器发射激光同步信号及扫描信号。
41.定位感应器接收激光定位器发出的激光同步信号及扫描信号,根据扫描信号的到达时间和角度计算出场景生成模块的空间位置信息,并将空间位置信息传输给计算机。
42.姿态传感器实时测量场景生成模块的姿态信息,并将姿态信息传输给计算机。
43.所述的姿态信息包括场景生成模块在相对于设定方向的方位角度信息,还包括场景生成模块相对于水平面的俯仰角度信息。设定方向可以是正北方向,但不限定于此。
44.解码与控制单元对光电侦察车光电设备控制终端的输出指令进行解码和识别,将针对激光测距设备的测距操作指令发送给计算机,接收计算机发出的距离数据并发送给光电设备控制终端;还将针对光电转塔的高低升降操作指令发送给无人机遥控单元;还将除激光测距操作指令、光电转塔高低升降操作指令以外的其它指令发送给光电转塔。所述的其它指令包括针对光电转塔的方位角调整指令、俯仰角调整指令、目标跟踪指令,以及针对ccd成像设备的变倍调节指令、变焦调节指令、亮度调节指令、对比度调节指令、目标选取指令等。
45.计算机编辑和保存多种用于侦察训练的虚拟场景。计算机还接收定位感应器发送的位置数据和姿态传感器发送的姿态数据,将其转化为虚拟场景中对应的视点位置和观察方向,再通过计算机本地处理得到从该视点观察到的虚拟场景画面,并将虚拟场景画面传输给vr显示屏。计算机还接收解码与控制单元发送的激光测距设备的测距操作指令,计算出当前虚拟场景画面中心点所对应目标与视点位置之间的距离数据,并将距离数据进行设定时长(例如约1秒)的软件延时后,发送给解码与控制单元。
46.所述的虚拟场景包括多种气候条件,以及一个或多个静态或移动的目标,用于多种环境下的侦察训练。
47.vr显示屏接收计算机输出的虚拟场景画面信息,并在液晶显示屏上显示。
48.光学镜头不仅将液晶显示屏的显示画面进行光学变换,模拟无穷远处的场景画面,还将场景画面尺寸与ccd成像设备的光学视场范围进行匹配。
49.车体位置控制终端模拟车体位置在水平方向的移动操作。车体位置控制终端用于旋翼无人机的升降、悬停以及在水平方向的运动操作,其先将运动操作的操作指令传输给
无人机遥控单元,无人机遥控单元再控制旋翼无人机的升降、悬停以及在水平方向的运动。
50.无人机遥控单元不仅接收解码与控制单元发送的操作指令,还接收车体位置控制终端发送的操作指令。无人机遥控单元将接收到的操作指令转化为遥控指令,通过无线方式发送给旋翼无人机。
51.下面结合图3对基于vr技术的光电侦察车模拟训练方法进行详细说明。
52.步骤1、将光电侦察车停于平坦地面,车头朝向设定方向,设定方向可以是正北方向。
53.步骤2、采用结构件及螺丝将场景生成模块与ccd成像设备联结固定,使光学镜头的轴线与ccd成像设备的光学系统轴线保持一致。
54.步骤3、将车载侦察设备中的光电设备控制终端与光电转塔之间的rs232串口电缆拧下,再使用rs232串口电缆连接光电设备控制终端及解码与控制单元,使用rs232串口电缆连接光电转塔及解码与控制单元。
55.步骤4、使用人员在光电侦察车内操作光电设备控制终端,将光电转塔的升降高度调整到0米,将光电转塔的高低角调整到0-00密位,将光电转塔的方位角调整到设定方向(正北方向)。
56.步骤5、使用人员操作车体位置控制终端,使旋翼无人机悬停到训练初始位置,机头朝向上述设定方向的反方向,当设定方向是正北方向时,机头就朝向正南方向。
57.在一种实施例中,所述的训练初始位置,是指位于场景生成模块的正北方向,与场景生成模块的水平距离约20米,高度高于场景生成模块约20m;训练初始位置的周围约20米内无障碍物。
58.步骤6、使用人员操作计算机选择一种虚拟场景进行训练数据初始化。
59.所述的计算机的存储介质内保存有用于光电侦察模拟训练的多种虚拟场景。
60.所述的训练数据初始化,包括计算机接收定位感应器发送的当前位置数据以及姿态传感器发送的当前姿态数据,并将其分别设定为虚拟场景中的视点的初始位置和初始观察方向。
61.步骤7、使用人员在车内通过操作光电设备控制终端和车体位置控制终端开展光电侦察模拟训练。
62.所述的光电侦察模拟训练,具体内容及实现方式为:
63.1.使用人员通过光电设备控制终端的软件界面,观察从ccd成像设备传输的模拟场景的图像。
64.2.使用人员通过操作光电设备控制终端的软件,进行光电转塔的方位角调整和高低角调整。
65.光电设备控制终端发送上述操作指令,经解码与控制单元解码和识别后不作拦截,转发给光电转塔,光电转塔执行相应动作。场景生成模块与光电转塔上的ccd成像模块联结在一起,同步执行相应动作。场景生成模块的姿态传感器采集当前姿态数据并发送给计算机,计算机将当前姿态数据转化为虚拟场景中的视点的观察方向,通过本地处理得到相应的虚拟场景画面,并传输给vr显示屏,光学镜头将vr显示屏的显示图像传输到ccd成像设备的视场内。
66.3.使用人员通过操作光电设备控制终端的软件,进行光电转塔的升高操作。
67.光电设备控制终端发送上述操作指令,经解码与控制单元解码和识别后被拦截,不转发给光电转塔,光电转塔不执行相应动作。解码与控制单元产生使旋翼无人机下降的操作指令,发送给无人机遥控单元,无人机遥控单元发出遥控指令,旋翼无人机接收遥控指令后,搭载激光定位器执行下降运动。按照相对运动原理,定位感应器相对于激光定位器作上升运动,与使用人员进行的光电转塔升高操作一致。定位感应器将新的位置数据传输给计算机,计算机将新的位置数据转化为虚拟场景中视点的新位置,通过本地处理得到相应的虚拟场景画面,并传输给vr显示屏,光学镜头将vr显示屏的显示图像传输到ccd成像设备的视场内。
68.4.使用人员通过操作光电设备控制终端的软件,进行光电转塔的降低操作。
69.实现原理和过程与3.相同。
70.5.使用人员通过操作车体位置控制终端,进行光电侦察车的位置移动操作。
71.车体位置控制终端分别将车体在水平方向的“向前”、“向后”、“向左”、“向右”移动操作指令传输给无人机遥控单元,无人机遥控单元发出遥控指令,由于光电侦察车的车头朝向正北,而旋翼无人机的机头朝向正南,两者朝向相对,因此,旋翼无人机搭载激光定位器相对于车头方向分别执行“向后”、“向前”、“向右”、“向左”移动。按照相对运动原理,定位感应器相对于激光定位器作“向前”、“向后”、“向左”、“向右”移动,与使用人员进行的光电侦察车的位置移动操作一致。定位感应器将新的位置数据传输给计算机,计算机将新的位置数据转化为虚拟场景中视点的新位置,通过本地处理得到相应的虚拟场景画面,并传输给vr显示屏,光学镜头将vr显示屏的显示图像传输到ccd成像设备的视场内。
72.6.使用人员通过操作光电设备控制终端的软件,对激光测距设备进行测距操作。
73.光电设备控制终端发送上述操作指令,经解码与控制单元解码和识别后被拦截,不转发给激光测距设备,激光测距设备不执行测距动作。解码与控制单元将此指令发送给计算机,计算机计算出当前虚拟场景画面中心点所对应目标与视点位置之间的距离数据,加入约1秒的软件延时后,将距离数据发送给解码与控制单元。
74.7.使用人员通过操作光电设备控制终端的软件,进行其它操作,包括针对光电转塔的目标跟踪操作,还包括针对ccd成像设备的变倍调节操作、变焦调节操作、亮度调节操作、对比度调节操作、目标选取操作等。
75.光电设备控制终端发送上述操作指令,经解码与控制单元解码和识别后不作拦截,转发给光电转塔,光电转塔及ccd成像设备接收指令后执行相应动作。
76.在光电侦察车的车载侦察设备中,光电设备控制终端的设备外壳上有一个db9公头rs232接口,光电转塔的设备外壳上有一个db9母头rs232接口,两者之间通过一根rs232串口电缆连接。在开始模拟训练前,需将该电缆的两端拧下。
77.解码与控制单元由硬件电路及软件组成,硬件电路主要包括单片机和电源模块,其中单片机具备4路rs232串口单元,分别通过电平转换连接到4个db9型rs232接口:第一个为db9母头接口,采用一根rs232串口电缆连接到光电设备控制终端的db9公头rs232接口;第二个为db9公头接口,采用一根rs232串口电缆连接到光电转塔的db9母头232接口;第三个为db9母头接口,采用一根rs232串口电缆连接到计算机的db9公头rs232接口;第四个为db9公头接口,采用一根rs232串口电缆连接到无人机遥控单元的db9母头232接口。
78.车体位置控制终端由硬件电路及软件组成,硬件电路主要包括操作手柄、单片机
和电源模块,其中单片机具备1路rs232串口单元,通过电平转换后与无人机遥控单元连接。单片机根据操作手柄的操作状态生成控制指令,通过rs232串口发送给无人机遥控单元。
79.解码与控制单元、车体位置控制终端的软件部分实现方法参考前述实施例,此处不再赘述。
80.在训练时,综合操控模块放置于光电侦察车外,有利于无人机遥控单元与旋翼无人机间的无线遥控。
81.无人机遥控单元是基于通用型的旋翼无人机遥控器改造而成,能接收解码与控制单元的控制指令,控制旋翼无人机的升降,还能接收车体位置控制终端的控制指令,控制旋翼无人机的悬停、升降以及水平方向运动。
82.计算机通过usb电缆和hdmi电缆与场景生成模块连接,usb电缆用于定位感应器及姿态传感器与计算机之间的数据通信,hmdi电缆用于计算机向vr显示屏传输虚拟场景图像数据。
83.场景生成模块中的光学镜头通过结构件、螺丝及打胶方式与vr显示屏固定,光学镜头的物镜轴线正对于vr显示屏的正面。定位感应器、姿态传感器通过结构件、螺丝及打胶方式固定于vr显示屏的反面。
84.开始训练前,通过采用结构件及螺丝将场景生成模块与ccd成像设备联结固定,使光学镜头的轴线与ccd成像设备的光学系统轴线保持一致。
85.激光定位器的重量约为400g,体积约为70mm
×
60mm
×
75mm;
86.旋翼无人机具备自动避障功能,载重能力不小于1kg,单块电池的续航时间不小于20分钟,在风力小于四级时,悬停稳定性不大于0.1米。
87.激光定位器通过采用结构件、螺丝或打胶方式固定在旋翼无人机的机身下方,采用旋翼无人机的电池为激光定位器供电。
88.由于光电侦察车的激光测距设备的实际测距精度为
±
5米,计算机接收到测距操作指令后,计算虚拟场景中目标的距离数据,将该距离数据近似为5的倍数值(个位数字是0或5)后,再发送给解码与控制单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1