基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的制作方法
1.本实用新型涉及仿生技术领域,尤其涉及基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛。
背景技术:
2.随着科技的发展,仿生设备的水品也在不断进步,而在众多精密的仿生设备中,眼睛作为仿生机器人、展示类模特以及人型玩具产品所必须的结构,其逼真度、运行噪音、使用寿命等方面可以直接决定产品的档次。
3.目前,市面上的仿生眼睛结构一味追求眼球和眼睑运动方式的逼真度,而忽略实现难度极大的瞳孔运动,瞳孔无法活动的眼睛,空洞无神,逼真度受到极大限制,此外,对于眼球和眼睑的运动,现有产品应用最多、技术最成熟的方案为有源式舵机驱动。
4.有源式舵机驱动产品通过舵机驱动各活动部件,模仿眼睛动作,在实现方面存在一定优势,但弊端更明显:舵机在运行过程中噪音较大,眼睛结构在安静环境下的使用体验不佳;舵机运行角度细分不足,眼球和眼睑运动过程连续性不佳,运动位置固定;舵机寿命极为有限,眼睛结构无法长期稳定工作。
5.因此,有必要提供基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛解决上述技术问题。
技术实现要素:
6.本实用新型提供基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,解决了仿生眼睛瞳孔不可变化、动作连续性有待提高的问题。
7.为解决上述技术问题,本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,包括:固定座;支撑件,所述支撑件的表面固定安装于所述固定座的外表面;眼睑组件,所述眼睑组件活动安装于所述支撑件的表面,所述眼睑组件包括上眼睑、第一连接件、下眼睑和第二连接件;眼球组件,所述眼球组件活动安装于所述眼睑组件的内侧,所述眼球组件包括眼球壳、万向节、第一鱼眼球头和第二鱼眼球头;第一驱动组件,所述第一驱动组件安装于所述固定座的顶部,所述第一驱动组件包括驱动电机、摇摆臂、连接杆、活动件和定位传感器,所述驱动电机的表面安装于所述固定座的表面,所述摇摆臂的表面固定安装于所述驱动电机的输出端,所述连接杆的表面固定安装于所述摇摆臂的一端,所述活动件的表面固定安装于所述摇摆臂的外表面,所述定位传感器的表面安装于所述固定座的顶部,所述活动件的表面与所述定位传感器的检测端相适配;第二驱动组件,所述第二驱动组件安装于所述固定座的底部;第三驱动组件,所述第三驱动组件安装于所述固定座的顶部;第四驱动组件,所述第四驱动组件安装于所述固定座的底部。
8.优选的,所述上眼睑的表面转动安装于所述支撑件的表面,所述上眼睑的表面通过所述第一连接件传动连接于所述第一驱动组件的输出端。
9.优选的,所述下眼睑的表面转动安装于所述支撑件的表面,所述下眼睑的表面通
过所述第二连接件传动连接于所述第二驱动组件的输出端。
10.优选的,所述眼球壳的内侧通过所述万向节的安装于所述固定座的顶部,所述第一鱼眼球头和第二鱼眼球头分别安装于所述眼球壳上。
11.优选的,所述第一鱼眼球头的一端连接于所述第三驱动组件的输出端,所述第二鱼眼球头的一端连接于所述第四驱动组件的输出端。
12.优选的,所述眼球壳的一端安装有角膜,并且眼球壳的内侧安装有瞳孔前壳,所述瞳孔前壳上分别开设有旋片固定孔和滑槽,所述瞳孔前壳的内侧安装有瞳孔旋片组,所述瞳孔旋片组上设置有固定轴和传动轴,所述瞳孔旋片组的另一侧安装有导轨盘,所述导轨盘上开设有滑孔,并且导轨盘上安装有缩紧螺丝,所述导轨盘的背面安装有导轨穿线片,所述导轨穿线片上安装有拉线,所述导轨穿线片的一侧安装有后片,所述后片的尾端安装有固定板。
13.优选的,所述固定轴的表面与所述旋片固定孔的内表面卡接,所述滑槽的内表面与所述导轨盘的外表面滑动连接。
14.优选的,所述传动轴的表面与所述滑孔的内表面传动连接,所述拉线的表面夹紧缠绕于所述锁紧螺丝的表面,所述固定板的表面固定安装于所述眼球壳上。
15.与相关技术相比较,本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛具有如下有益效果:
16.本实用新型提供基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,驱动组件是驱动机器人眼睛部分运动的基本单元,由驱动电机部分和定位传感器部分构成,每次设备断电后开机,需要摇摆臂向着定位传感器方向转动,从而确定摇摆臂归位,而后以此位置为基准进行转动,通过摇摆臂和连接杆驱动眼睑组件进行运动,实现眼睑的开合,驱动结构同样能够带动眼球组件进行转动调节,实现多方位的眼球活动,每只眼睛部署四组驱动组件,分别控制眼球左右转动、眼球上下转动、上眼睑闭合以及下眼睑闭合,按照模块化思想设计出的驱动组件可根据需求单独或组合使用,实现如仅眼睑可动、仅眼球可动的眼睛结构,在固定座的表面设置第一驱动组件和第三驱动组件能带动瞳孔进行各种角度的转动调节。
附图说明
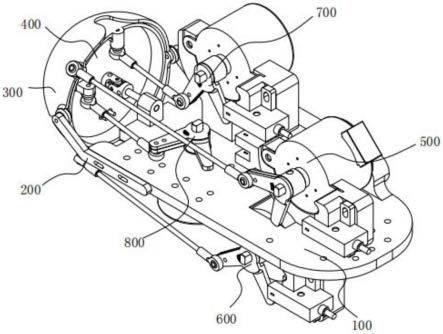
17.图1为本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的第一实施例的三维图;
18.图2为图1所示的整体的仰角部分的三维图;
19.图3为图1所示的眼睑组件部分的三维图;
20.图4为图1所示的眼球组件部分的三维图;
21.图5为图1所示的第一驱动组件部分的三维图;
22.图6为本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的第二实施例的爆炸图;
23.图7为图6所示的瞳孔前壳部分的三维图;
24.图8为图6所示的瞳孔旋片组部分的三维图;
25.图9为图6所示的导轨盘部分的三维图。
26.图中标号:
27.100、固定座;
28.200、支撑件;
29.300、眼睑组件,301、上眼睑,302、第一连接件,303、下眼睑,304、第二连接件;
30.400、眼球组件,401、眼球壳,402、万向节,403、第一鱼眼球头,404、第二鱼眼球头,410、角膜,420、瞳孔前壳,421、旋片固定孔,422、滑槽,430、瞳孔旋片组,431、固定轴,432、传动轴,440、导轨盘,441、滑孔,442、锁紧螺丝,450、导轨穿线片,460、拉线,470、后片,480、固定板;
31.500、第一驱动组件,501、驱动电机,502、摇摆臂,503、连接杆,504、活动件,505、定位传感器;
32.600、第二驱动组件;
33.700、第三驱动组件;
34.800、第四驱动组件。
具体实施方式
35.下面结合附图和实施方式对本实用新型作进一步说明。
36.第一实施例:
37.请结合参阅图1、图2、图3、图4和图5,其中,图1为本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的第一实施例的三维图;图2为图1所示的整体的仰角部分的三维图;图3为图1所示的眼睑组件部分的三维图;图4为图1所示的眼球组件部分的三维图;图5为图1所示的第一驱动组件部分的三维图。
38.基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,包括:固定座100;
39.支撑件200,所述支撑件200的表面固定安装于所述固定座100的外表面;
40.眼睑组件300,所述眼睑组件300活动安装于所述支撑件200的表面,所述眼睑组件300包括上眼睑301、第一连接件302、下眼睑303和第二连接件304;
41.眼球组件400,所述眼球组件400活动安装于所述眼睑组件300的内侧,所述眼球组件400包括眼球壳401、万向节402、第一鱼眼球头403和第二鱼眼球头404;
42.第一驱动组件500,所述第一驱动组件500安装于所述固定座100的顶部,所述第一驱动组件500包括驱动电机501、摇摆臂502、连接杆503、活动件504和定位传感器505,所述驱动电机501的表面安装于所述固定座100的表面,所述摇摆臂502的表面固定安装于所述驱动电机501的输出端,所述连接杆503的表面固定安装于所述摇摆臂502的一端,所述活动件504的表面固定安装于所述摇摆臂502的外表面,所述定位传感器505的表面安装于所述固定座100的顶部,所述活动件504的表面与所述定位传感器505的检测端相适配;
43.第二驱动组件600,所述第二驱动组件600安装于所述固定座100的底部;
44.第三驱动组件700,所述第三驱动组件700安装于所述固定座100的顶部;
45.第四驱动组件800,所述第四驱动组件800安装于所述固定座100的底部。
46.驱动组件是驱动机器人眼睛部分运动的基本单元,由驱动电机部分和定位传感器部分构成,每次设备断电后开机,需要摇摆臂502向着定位传感器505方向转动,从而确定摇摆臂归位,而后以此位置为基准进行转动,通过摇摆臂502和连接杆503驱动眼睑组件300进
行运动,实现眼睑的开合,驱动结构同样能够带动眼球组件400进行转动调节,实现多方位的眼球活动,每只眼睛部署驱动组件,分别控制眼球左右转动、眼球上下转动、上眼睑闭合以及下眼睑闭合。
47.驱动组件由第一驱动组件500、第二驱动组件600、第三驱动组件700和第四驱动组件800组成;
48.第一驱动组件500、第二驱动组件600、第三驱动组件700和第四驱动组件800的驱动原理和连接结构相同,分别用于控制上眼睑闭合、下眼睑闭合、眼球上下转动以及眼球左右转动。
49.驱动电机501采用步进伺服电机,使用时连接外界的电源,为驱动电机501的使用提供动力的来源。
50.采用步进伺服电机,运行角度细分更高,眼球和眼睑运动具有更强连续性,运动位置灵活,寿命大幅提升,可以长时间不间断无噪音运行。
51.定位传感器505配合活动件504用于对驱动电机501运行位置的校准。
52.所述上眼睑301的表面转动安装于所述支撑件200的表面,所述上眼睑301的表面通过所述第一连接件302传动连接于所述第一驱动组件500的输出端。
53.以第一驱动组件500为例:
54.使用时,启动驱动电机501,驱动电机501正转时,摇摆臂502带动连接杆503和活动件504同步正转,活动件504向定位传感器505的内部移动,实现设备的复位,连接杆503通过第一连接件302带动上眼睑301向上转动开启;
55.驱动电机501反转时,摇摆臂502带动连接杆503和活动件504同步反转,连接杆503通过第一连接件302带动上眼睑301向下转动,使得上眼睑301能够自动关闭。
56.所述下眼睑303的表面转动安装于所述支撑件200的表面,所述下眼睑303的表面通过所述第二连接件304传动连接于所述第二驱动组件600的输出端。
57.所述眼球壳401的内侧通过所述万向节402的安装于所述固定座100的顶部,所述第一鱼眼球头403和第二鱼眼球头404分别安装于所述眼球壳401上。
58.所述第一鱼眼球头403的一端连接于所述第三驱动组件700的输出端,所述第二鱼眼球头404的一端连接于所述第四驱动组件800的输出端。
59.在可选的方式中,眼球壳401内置液晶显示屏,液晶显示屏可根据需求显示瞳孔动画,从而实现眼睛结构的瞳孔变化;
60.眼球壳401的后侧通过两个鱼眼球头方便与对应的驱动部分连接,可在各自的自由度发生驱动运动;
61.眼球壳401的中央通过万向节402与固定座100的连接结构相连,保证眼球能够相对固定座100发生自适应角度的转动,眼球壳401的背面设置有两个线孔,线孔内用于安装液晶显示屏的连接导线结构。
62.本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的工作原理如下:
63.使用时,启动第一驱动组件500,第一驱动组件500通过第一连接件302带动上眼睑301上下开合;
64.启动第二驱动组件600,第二驱动组件600通过第二连接件304带动下眼睑303上下
开合,实现眼睛的睁眼和闭眼控制;
65.启动第三驱动组件700,第三驱动组件700转动时通过第一鱼眼球头403带动眼球壳401在万向节402的表面上下转动调节;
66.启动第四驱动组件800,第四驱动组件800转动时通过第二鱼眼球头404带动眼球壳401在万向节402的表面左右转动调节。
67.与相关技术相比较,本实用新型提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛具有如下有益效果:
68.驱动组件是驱动机器人眼睛部分运动的基本单元,由驱动电机部分和定位传感器部分构成,每次设备断电后开机,需要摇摆臂502向着定位传感器505方向转动,从而确定摇摆臂归位,而后以此位置为基准进行转动,通过摇摆臂502和连接杆503驱动眼睑组件300进行运动,实现眼睑的开合,驱动结构同样能够带动眼球组件400进行转动调节,实现多方位的眼球活动,每只眼睛部署四组驱动组件,分别控制眼球左右转动、眼球上下转动、上眼睑闭合以及下眼睑闭合,按照模块化思想设计出的驱动组件可根据需求单独或组合使用,实现如仅眼睑可动、仅眼球可动的眼睛结构,在固定座100的表面设置第一驱动组件500和第三驱动组件700能带动瞳孔进行各种角度的转动调节。
69.第二实施例:
70.请参阅图6、图7、图8和图9,基于本技术的第一实施例提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,本技术的第二实施例提出另基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
71.具体的,本技术的第二实施例提供的基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛的不同之处在于,基于步进伺服电机的静音模块化智能瞳孔可变仿生眼睛,还包括:
72.所述眼球壳401的一端安装有角膜410,并且眼球壳401的内侧安装有瞳孔前壳420,所述瞳孔前壳420上分别开设有旋片固定孔421和滑槽422,所述瞳孔前壳420的内侧安装有瞳孔旋片组430,所述瞳孔旋片组430上设置有固定轴431和传动轴432,所述瞳孔旋片组430的另一侧安装有导轨盘440,所述导轨盘440上开设有滑孔441,并且导轨盘440上安装有缩紧螺丝442,所述导轨盘440的背面安装有导轨穿线片450,所述导轨穿线片450上安装有拉线460,所述导轨穿线片的一侧安装有后片470,所述后片470的尾端安装有固定板480。
73.所述固定轴431的表面与所述旋片固定孔421的内表面卡接,所述滑槽422的内表面与所述导轨盘440的外表面滑动连接。
74.所述传动轴432的表面与所述滑孔441的内表面传动连接,所述拉线460的表面夹紧缠绕于所述锁紧螺丝442的表面,所述固定板480的表面固定安装于所述眼球壳401上。
75.瞳孔前壳420上设置了旋片固定孔421,用于固定瞳孔旋片组430,瞳孔旋片组430由至少十组瞳孔旋片组成,瞳孔旋片上的固定轴431与旋片固定孔421连接,每一个瞳孔旋片围绕此端进行旋转;
76.瞳孔前壳420上设置了滑槽422,导轨盘440在滑槽422内进行转动。
77.瞳孔旋片上的固定轴431安插在旋片固定孔421的内部,传动轴432安装在导轨盘440上的滑孔441的内部。
78.十个瞳孔旋片交叉叠加构成瞳孔旋片组430。
79.导轨盘440置于滑槽422内,在拉线460的带动下能够进行转动;
80.导轨盘440设有滑孔441结构,为传动轴432的安装和连接提供支持,并在导轨盘440旋转运动时跟随滑动,实现机械带动瞳孔开合;
81.导轨盘440设有锁紧螺丝442,用于夹紧导轨盘拉线;
82.拉线460穿过导轨穿线片450上的线孔,拉线460的深度靠导轨穿线片450的线孔来确定;
83.后片470为通体黑色,模拟人眼球的外貌;
84.固定板480用于瞳孔内部各部件的固定以及整个瞳孔变化机械结构的安装固定。
85.本实用新型提供的第二实施例的工作原理:
86.使用时,通过抽动拉线460的一端,导轨盘440正向旋转,瞳孔旋片组430发生转动收缩,实现瞳孔的缩小;
87.通过抽动拉线460的另一端,导轨盘440反向旋转,瞳孔旋片组430发生转动展开,实现瞳孔的增大。
88.本实用新型提供的第二实施例的有益效果:
89.通过拉线460方便带动夹紧连接的导轨盘440旋转,导轨盘440旋转时通过滑孔441带动传动轴432传动,传动轴432带动瞳孔旋片组430旋转收缩,实现对瞳孔大小的机械动作调节,使得瞳孔大小可根据需求实时变化,使得整体眼睛更具神采,其逼真度大幅提升。
90.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1