一种室内激光绘图系统的制作方法
1.本实用新型涉及测绘技术领域,具体涉及一种室内激光绘图系统。
背景技术:
2.激光测距仪,是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一。
3.目前通过手持测量设备测量然后人工根据测量数据绘制工程图纸,易受到测量人自身的影响,测量数据易存在较大误差。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的缺点与不足,提供一种室内激光绘图系统。
5.本实用新型的一个实施例提供一种室内激光绘图系统,包括:固定座、转动座、第一旋转驱动组件、转动盘、第二旋转驱动组件、多个激光发射器和数据处理模块;
6.所述转动座与所述固定座活动连接,所述第一旋转驱动组件设置在所述固定座上,驱动所述转动座沿第一轴线转动,所述转动盘活动设置在所述转动座上,所述第二旋转驱动组件设置在所述转动座上,驱动所述转动盘沿第二轴线转动,所述多个激光发射器设置在所述转动盘上,围绕所述第二轴线均匀布置,所述激光发射器的发射方向朝向远离所述第二轴线的方向,所述第一轴线和所述第二轴线相互不平行,所述数据处理模块与所述激光发射器信号连接。
7.相对于现有技术,本实用新型的室内激光绘图系统只需要将固定座放置在室内合适位置,然后通过两个旋转驱动组件共同控制多个激光发射器的发射角度,通过激光发射器对室内不同方向不同角度进行测距,进而获得各个激光反射点的坐标数据,根据对所获取的激光反射点云的数据进行配准,进而形成室内三维图。
8.在一些可选的实施方式中,所述第一轴线和所述第二轴线相互垂直。
9.在一些可选的实施方式中,所述转动座呈弧形,其围绕所述第一轴线布置,所述转动座围绕形成安装空间,所述转动座的两端之间形成第一避让空间,所述安装空间与所述第一避让空间连通;
10.所述第二旋转驱动组件和所述转动盘设置在所述安装空间内,所述转动盘转动后,所述激光发射器发出的激光穿过所述第一避让空间。
11.在一些可选的实施方式中,所述转动座包括两个弧形板和多个支撑件,所述两个弧形板围绕所述第一轴线布置,所述多个支撑件沿所述弧形板的延伸方向依序排列设置在所述两个弧形板之间,所述支撑件和所述两个弧形板共同围绕形成第二避让空间,所述转动盘转动后,所述激光发射器发出的激光穿过所述第二避让空间。
12.在一些可选的实施方式中,所述转动座对应的角度为180
°
~300
°
。
13.在一些可选的实施方式中,所述转动座对应的角度为270
°
。
14.在一些可选的实施方式中,所述转动盘上设置有四个所述激光发射器,所述四个激光发射器均匀围绕所述第二轴线布置。
15.在一些可选的实施方式中,所述第一旋转驱动组件包括第一驱动电机,所述第一驱动电机设置在所述转动座上,其输出轴与所述转动盘传动连接。
16.在一些可选的实施方式中,所述固定座上设置有导向凹槽,所述固定座内设置有容置腔,所述导向凹槽与所述容置腔连通;
17.所述转动座的侧面设置有传动齿部,所述传动齿部围绕所述第一轴线布置,所述转动座部分伸入所述导向凹槽,所述传动齿部部分位于所述导向凹槽内;
18.所述第二旋转驱动组件包括第二驱动电机和传动齿轮,所述第二驱动电机设置在所述容置腔内,所述传动齿轮与所述第二驱动电机传动连接,其伸入所述导向凹槽内,与所述传动齿部啮合。
19.在一些可选的实施方式中,所述转动座的两侧都设置有传动齿部;
20.所述第二旋转驱动组件包括两个所述传动齿轮,两个所述传动齿轮分别位于所述导向凹槽的两侧,分别与所述转动座的两侧的传动齿部一一对应啮合。
21.为了能更清晰的理解本实用新型,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
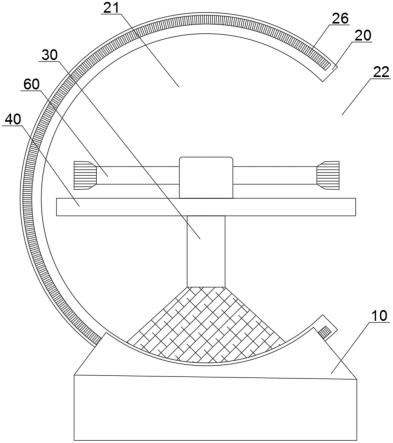
22.图1为本实用新型一个实施例的室内激光绘图系统的结构示意图;
23.图2为本实用新型一个实施例的室内激光绘图系统的剖视图;
24.图3为本实用新型一个实施例的转动座的局部的结构示意图;
25.图4为本实用新型一个实施例的激光发射器和转动盘的结构示意图。
26.附图标记说明:
27.10、固定座;11、导向凹槽;12、容置腔;20、转动座;21、安装空间; 22、第一避让空间;23、弧形板;24、支撑件;25、第二避让空间;26、传动齿部;30、第一旋转驱动组件;40、转动盘;50、第二旋转驱动组件;51、第二驱动电机;52、传动齿轮;60、激光发射器。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.请参阅图1,其是本实用新型一个实施例的室内激光绘图系统的结构示意图,该室内激光绘图系统,包括:固定座10、转动座20、第一旋转驱动组件30、转动盘40、第二旋转驱动组件50、多个激光发射器60和数据处理模块(图未示)。
30.请参阅图2,其是本实用新型一个实施例的室内激光绘图系统的剖视图,转动座20与固定座10活动连接,第一旋转驱动组件30设置在固定座10上,驱动转动座20沿第一轴线
转动,转动盘40活动设置在转动座20上,第二旋转驱动组件50设置在转动座20上,驱动转动盘40沿第二轴线转动,多个激光发射器60设置在转动盘40上,围绕第二轴线均匀布置,激光发射器60的发射方向朝向远离第二轴线的方向,第一轴线和第二轴线相互不平行,数据处理模块与激光发射器60信号连接。
31.转动座20和转动盘40转动,可以调节激光发射器60朝向不同方向发射激光,获得不同方向的激光反射点,根据激光反射点云的数据进行配准,进而形成室内三维图轮廓。
32.数据处理模块可以是通用处理器,其可以是中央处理器(centralprocessing unit,cpu)、网络处理器(network processor,np)等;还可以是数字信号处理器(digital signal processor,dsp)、专用集成电路(applicationspecificintegrated circuit,asic)、现场可编程门阵列(field-programmablegate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
33.为了使得激光发射器60的覆盖范围更全面,在一些可选的实施方式中,第一轴线和第二轴线相互垂直。
34.为了避免转动座20遮挡激光发射器60发射的激光,在一些可选的实施方式中,转动座20呈弧形,其围绕第一轴线布置,转动座20围绕形成安装空间 21,转动座20的两端之间形成第一避让空间22,安装空间21与第一避让空间 22连通;第二旋转驱动组件50和转动盘40设置在安装空间21内,转动盘40 转动后,激光发射器发出的激光穿过第一避让空间22。
35.请参阅图3,其是本实用新型一个实施例的转动座的局部的结构示意图,为了避免转动座20遮挡激光发射器60发射的激光,在一些可选的实施方式中,转动座20包括两个弧形板23和多个支撑件24,两个弧形板23围绕第一轴线布置,多个支撑件24沿弧形板23的延伸方向依序排列设置在两个弧形板23之间,支撑件24和两个弧形板23共同围绕形成第二避让空间25,转动盘40转动后,激光发射器60发出的激光穿过第二避让空间25。另外,优选的,弧形板23的厚度设计得较薄,使得第二旋转驱动组件50带动转动盘40的旋转最小间隔角度时,激光发射器60的激光能够越过弧形板23,使得转动盘40无论怎么旋转,弧形板23都不会遮挡激光发射器60的激光,例如,在一个实施方式中,第二旋转驱动组件50能够带动转动盘40旋转的最小间隔角度为1
°
,即激光发射器 60绕第二轴线转动的最小间隔角度为1
°
,如果弧形板23正好位于激光发射器 60在转动前发射的激光和在转动后发射的激光之间,则弧形板23不会遮挡激光发射器60,从而避免测量误差。
36.为了使得转动座20能够转动足够的角度,在一些可选的实施方式中,转动座20对应的角度为180
°
~300
°
。在本实施方式中,转动座20对应的角度为270
°
。
37.请参阅图4,其是本实用新型一个实施例的激光发射器和转动盘的结构示意图,多个激光发射器60能够提高工作效率,减少测绘时间,在本实施方式中,转动盘40上设置有四个激光发射器60,四个激光发射器60均匀围绕第二轴线布置。
38.在一些可选的实施方式中,第一旋转驱动组件30包括第一驱动电机,第一驱动电机设置在转动座20上,其输出轴与转动盘40传动连接。当然,第一旋转驱动组件30的结构并不局限于此,本领域技术人员也可以根据本实用新型的教导选择其他合适的结构。在本实施方式中,转动座20上还设置有支撑座,第一驱动电机设置在支撑座上,支撑座能够使得转动盘40被布置在安装空间21 的中间位置。
39.在一些可选的实施方式中,固定座10上设置有导向凹槽11,固定座10内设置有容置腔12,导向凹槽11与容置腔12连通;转动座20的侧面设置有传动齿部26,传动齿部26围绕第一轴线布置,转动座20部分伸入导向凹槽11,传动齿部26部分位于导向凹槽11内;第二旋转驱动组件50包括第二驱动电机51 和传动齿轮52,第二驱动电机51设置在容置腔12内,传动齿轮52与第二驱动电机51传动连接,其伸入导向凹槽11内,与传动齿部26啮合,第二驱动电机 51通过传动齿轮52转动而带动转动座20沿导向凹槽11移动,由于转动座20 呈弧形,在沿导向凹槽11移动时,也在绕第一轴线转动。当然,第二旋转驱动组件50的结构并不局限于此,本领域技术人员也可以根据本实用新型的教导选择其他合适的结构。
40.为了提高稳定性,在一些可选的实施方式中,转动座20的两侧都设置有传动齿部26;第二旋转驱动组件50包括两个传动齿轮52,两个传动齿轮52分别位于导向凹槽11的两侧,分别与转动座20的两侧的传动齿部26一一对应啮合。第二驱动电机51可以通过传动机构来与两个传动齿轮52连接,或者第二驱动电机51可以采用双轴电机。
41.另外,容置腔12内还可设置电池模组,电池模组与第一驱动电机和第二驱动电机51电连接。
42.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1