一种太空探测机器人的制作方法
1.本实用新型属于科教玩具领域,具体是一种太空探测机器人。
背景技术:
2.太空探测机器人,是一种竞赛或者教学时模拟太空探测,在各星球之间移动的教学玩具,又可以叫做一种用于竞赛或教学的太空模拟探测机器人探险车,具体展现形式为机器人探险车。机器人探险车顾名思义是一种简单的可移动的机器人,其可广泛的运用于机器人教学和科研。探险车相较于传统的汽车玩具相比,其功能多,因此用于控制探险车行进的模块也相应增加,这就导致探险车内部的连接线、电路板、控制器等组件之间的连接线走线复杂,在运动过程中若电源线或数据线进行限位,则会有连接线进入到行走机构的情况。另外,传统的机器人探险车,为了实现探险车返回的目的,行走机构一般较复杂,不利于教学时安装使用。
技术实现要素:
3.为了弥补现有技术的不足,本实用新型提供一种太空探测机器人的技术方案。
4.所述的一种太空探测机器人,包括车架,所述车架的两侧设置有行走机构,所述车架的上方设置有线路板,下方设置有驱动组件以及电源,所述线路板、驱动组件以及电源之间通过导线连接,所述车架上设置有线孔,线孔包括圆孔和方孔,所述方孔的底部设置有限位槽,所述限位槽的外侧设置有开口,所述导线从所述开口中进入并卡接在所述限位槽中,所述导线穿过线孔后与驱动组件和/或电源连接。
5.进一步的,所述行走机构包括支脚和连杆,所述支脚设置有三组,相邻的支脚之间通过所述连杆连接。
6.进一步的,所述支脚的底端为弧形面,表面设置有防滑纹,所述支脚的内壁上设置有安装槽,所述连杆的两端通过固定件铰接配合安装在所述安装槽中。
7.进一步的,所述连杆包括a连杆、b连杆和c连杆,所述支脚包括a支脚、b支脚和c支脚,所述支脚上设置有上装配孔和下装配孔。
8.进一步的,所述b支脚与所述驱动组件传动连接,所述a支脚与b支脚之间设置有a连杆和b连杆,所述b支脚与c支脚之间通过所述c连杆连接,所述a连杆与b连杆呈交叉设置。
9.进一步的,所述a支脚以及c支脚的下装配孔中插接设置有转轴。
10.进一步的,所述a支脚与c支脚之间相互平行,所述a支脚与b支脚之间相互对称,所述a连杆与c连杆的一端分别与所述b支脚的下装配孔连接,另一端与a支脚和c支脚的上装配孔连接,所述b连杆的前端与a支脚下装配孔连接,另一端与b支脚的上装配孔连接。
11.进一步的,所述驱动组件包括电机、驱动轴以及设置在所述驱动轴端部的偏心接头,通过所述偏心接头配合将所述b支脚与所述驱动轴连接,所述电机与所述驱动轴传动连接。
12.进一步的,所述车架上设置有线路板安装槽,所述线路板上包括驱动电路,所述驱
动电路包括电阻r1、r2、r3、r4、r5、r6、r7,电容c1、c2、c3、c4,三极管q1、q2、q3、q4,双向发光二极管d12,电位器rp1,拨动开关ka、芯片u、电源bt以及电机m1,所述线路板设置有五个引脚,所述引脚上设置有所述导线,通过所述导线将所述电路板与驱动组件、电源以及拨动开关连接。
13.进一步的,所述电机m1与所述电容c4并联,并且所述电机m1的2脚连接至所述线路板的1脚,所述电机m1的1脚连接至所述线路板的3脚,所述电源bt的正极连接至所述线路板的2脚,负极连接至所述拨动开关ka的1脚,所述拨动开关ka的2脚和3脚分别连接至所述线路板的5脚和4脚;
14.所述电容c1的一端与所述电阻r1的一端共同接入所述芯片u的6脚,所述电容c1的另一端、电容c2的一端、三极管a2、q4的1脚以及线路板的5脚共同连接至所述芯片u的5脚,所述电阻r1的另一端连接至所述电位器的1脚,所述电位器的2、3脚,所述电阻r2的一端,所述线路板的4脚,以及所述电容c2的另一端共同连接至所述芯片u的1脚,所述电阻r2的另一端、三极管q1、q3的1脚共同连接至所述线路板的2脚,所述电阻r7的一端、三极管q3、q4的3脚以及电容c3的一端共同接入线路板的1脚,所述三极管q1、q2的3脚、电容c3的另一端以及双向发光二极管d12的一端共同接入线路板的3脚,双向发光二极管d12的另一端与所述电阻r7的另一端连接,所述三极管q1、q2、q3、q4的2脚分别穿过电阻r3、r4、r5及r6后与芯片u的8脚、2脚、7脚以及3脚连接。
15.与现有技术相比,本实用新型有以下优点:
16.本实用新型探险车,导线、电源线等线路,通过不同的线孔进行排线,其中方孔的底部设置有限位槽以及开口,导线等通过开口进入限位槽进行限位,可以避免导线排线混乱。
17.电机包括外壳,对内部的传动结构以及电机本体进行保护,外壳的端部设置有连接座,通过连接座与螺钉配合,将电机固定在车架的底部。
18.行走机构一共包括六个支脚,同一侧的支脚通过连杆传动连接,两侧的支脚分别通过驱动轴或转轴连接,通过驱动电路控制支脚摆动,实现探险车前进或后退,提高探险车的功能性以及趣味性。
附图说明
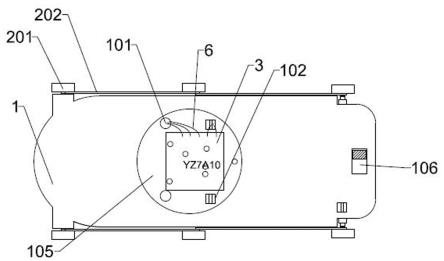
19.图1为车架的俯视图;
20.图2为车架的仰视图;
21.图3为车架上限位槽的结构示意图;
22.图4为行走机构中连杆与支脚的装配示意图;
23.图5为本实用新型中探险车的驱动电路原理图。
具体实施方式
24.下面结合附图对本实用新型作进一步说明。
25.如图1-4所示,一种太空探测机器人,包括车架1,车架1的两侧设置有行走机构2,车架1的上方设置有线路板3,下方设置有驱动组件4以及电源5,线路板3、驱动组件4以及电源5之间通过导线6连接,车架1上设置有线孔,线孔包括圆孔101和方孔102,方孔102的底部
设置有限位槽103,限位槽103的外侧设置有开口104,导线6从开口104中进入并卡接在限位槽103中,导线穿过线孔后与驱动组件4和/或电源5连接。行走机构2包括支脚201和连杆202,支脚201设置有三组,相邻的支脚201之间通过连杆202连接。支脚201的底端为弧形面2014,表面设置有防滑纹2015,支脚201的内壁上设置有安装槽2016,连杆202的两端通过固定件203铰接配合安装在安装槽2016中。也就是说,固定件固定在安装槽中,连杆202能在一定范围内绕固定件转动。
26.行走机构2具体结构如下,其中连杆202包括a连杆2021、b连杆2022和c连杆2023,支脚包括a支脚2011、b支脚2012和c支脚2013,支脚201上设置有上装配孔2017和下装配孔2018。b支脚2012与驱动组件4传动连接,a支脚与b支脚之间设置有a连杆和b连杆,b支脚与c支脚之间通过c连杆连接,a连杆与b连杆呈交叉设置。a支脚与c支脚之间相互平行,a支脚与b支脚之间相互对称,a连杆与c连杆的一端分别与b支脚的下装配孔连接,另一端与a支脚和c支脚的上装配孔连接,b连杆的前端与a支脚下装配孔连接,另一端与b支脚的上装配孔连接。驱动组件4包括电机401、驱动轴402以及设置在驱动轴402端部的偏心接头403,通过偏心接头403配合将b支脚2012与驱动轴402连接,电机401与驱动轴402传动连接。a支脚以及c支脚的下装配孔2018中插接设置有转轴2019。电机401包括外壳,对内部的传动结构以及电机本体进行保护,外壳的端部设置有连接座,通过连接座与螺钉配合,将电机固定在车架的底部。
27.行走时,电机401启动,电机的输出轴上设置主动轮,驱动轴402上固定设置有从动轮,主动轮与从动轮啮合连接,并且通过电机401驱使驱动轴402转动,进而带动端部的偏心接头403转动。偏心接头转动时,b支脚跟随偏心接头做往复摆动动作,进而通过连杆带动a支脚和c支脚做往复摆动动作,整体看探险车的行走机构2中的a支脚和c支脚运动轨迹相同,b支脚则与a支脚的运行轨迹相反,实现整体的行走运动,直至行走至“寻宝点”,完成探险。
28.结合图5,车架1上设置有线路板安装槽105以及开关106,线路板3上包括驱动电路,驱动电路包括电阻r1、r2、r3、r4、r5、r6、r7,电容c1、c2、c3、c4,三极管q1、q2、q3、q4,双向发光二极管d12,电位器rp1,拨动开关ka、芯片u、电源bt以及电机m1,线路板3设置有五个引脚,引脚上设置有导线6,通过导线6将电路板3与驱动组件4、电源5以及拨动开关连接。线路板3为y27a10印刷电路板,d12为红绿双向发光二极管。电阻r1-r7的阻值依次为68kω,33ω,270ω,270ω,270ω,270ω,240ω。电容c1-c4的电容大小依次为1μf,10μf,1μf,0.1μf。
29.其中,电机m1与电容c4并联,并且电机m1的2脚连接至线路板的1脚,电机m1的1脚连接至线路板的3脚,电源bt的正极连接至线路板的2脚,负极连接至拨动开关ka的1脚,拨动开关ka的2脚和3脚分别连接至线路板的5脚和4脚。
30.电容c1的一端与电阻r1的一端共同接入芯片u的6脚,电容c1的另一端、电容c2的一端、三极管a2、q4的1脚以及线路板的5脚共同连接至芯片u的5脚,电阻r1的另一端连接至电位器的1脚,电位器的2、3脚,电阻r2的一端,线路板的4脚,以及电容c2的另一端共同连接至芯片u的1脚,电阻r2的另一端、三极管q1、q3的1脚共同连接至线路板的2脚,电阻r7的一端、三极管q3、q4的3脚以及电容c3的一端共同接入线路板的1脚,三极管q1、q2的3脚、电容c3的另一端以及双向发光二极管d12的一端共同接入线路板的3脚,双向发光二极管d12的另一端与电阻r7的另一端连接,三极管q1、q2、q3、q4的2脚分别穿过电阻r3、r4、r5及r6后与
芯片u的8脚、2脚、7脚以及3脚连接。
31.本实用新型探险车,导线、电源线等线路,通过不同的线孔进行排线,其中方孔的底部设置有限位槽以及开口,导线等通过开口进入限位槽进行限位,可以避免导线排线混乱。
32.电机包括外壳,对内部的传动结构以及电机本体进行保护,外壳的端部设置有连接座,通过连接座与螺钉配合,将电机固定在车架的底部。
33.行走机构一共包括六个支脚,同一侧的支脚通过连杆传动连接,两侧的支脚分别通过驱动轴或转轴连接,通过驱动电路控制支脚摆动,实现探险车前进或后退,提高探险车的功能性以及趣味性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1