一种基于激光投影的无人机飞行训练系统
1.本实用新型涉及无人机飞行控制技术领域,具体涉及一种基于激光投影的无人机飞行训练系统。
背景技术:
2.近年来,随着无人机应用技术的发展,多旋翼无人机已经在各行各业发挥着非常重要的作用,这导致社会对拥有无人机执照的多旋翼无人机飞手的需求与日俱增,也催生了大量的多旋翼无人机飞行训练课程。当前,多旋翼无人机飞行训练的主要内容是360
°
自旋和8字飞行,即多旋翼无人机围绕立轴进行360度旋转和沿着“8”字飞行(见图1),能够锻炼飞手操控的方向感和对飞行位置的把握。
3.但在飞行训练过程中,由于无人机在高空中,通过肉眼观察存在视觉差,新手在训练过程中无法准确感知无人机的位置和方向偏差,导致训练效率低下。
4.且通过普通无人机训练时,无人机自带的锂电池续航能力只有10~15分钟,训练过程中需频繁更换电池,减小了单节课时的训练频次,降低了训练效率。
5.综上所述,急需一种基于激光投影的无人机飞行训练系统以解决现有技术中存在的问题。
技术实现要素:
6.本实用新型目的在于提供一种基于激光投影的无人机飞行训练系统,以解决无人机飞行训练过程中训练效率低下的问题。
7.为实现上述目的,本实用新型提供了一种基于激光投影的无人机飞行训练系统,包括系留无人机、激光投影装置和路线定位装置;所述激光投影装置设置于系留无人机的机体上,用于在地面上投射系留无人机的实际飞行路线,所述路线定位装置包括沿预定飞行路线设置于地面的路线标识和定位锥桶。
8.优选的,所述系留无人机为系留多旋翼无人机,包括供电单元、线缆收放单元和控制单元;所述供电单元与地表电源连接,通过线缆收放单元上的线缆向机体供电;所述控制单元分别与机体、供电单元和线缆收放单元连接。
9.优选的,所述供电单元包括插头和开关电源,所述插头用于实现地表电源和开关电源之间的连接;所述开关电源分别与机体、线缆收放单元和控制单元连接。
10.优选的,所述线缆收放单元包括卷筒支架、卷筒和驱动电机;所述卷筒和驱动电机均设置在卷筒支架上,所述线缆缠绕在卷筒上,通过驱动电机带动卷筒旋转,从而实现线缆的收放。
11.优选的,所述线缆的两端均设有导电滑环。
12.优选的,所述控制单元包括飞控、数传天空端、数传地面端、控制板和电机驱动器;所述飞控和数传天空端均设置于机体上;所述控制板分别与数传地面端和电机驱动器连接;所述电机驱动器与驱动电机连接。
13.优选的,所述机体上设有与所述飞控连接的传感器;所述传感器为位移传感器、速度传感器或拉力传感器中的一种。
14.优选的,所述激光投影装置为激光投影灯,所述激光投影装置设置于机体的底部,其投影方向正对于地面。
15.优选的,所述路线标识为两个相切的圆环标识。
16.优选的,所述圆环标识的内圈和外圈之间间隔为1m。
17.应用本实用新型的技术方案,具有以下有益效果:
18.(1)本实用新型中,通过在机体上设置激光投影装置,用于在地面上实时投射系留无人机的实际飞行路线,路线定位装置沿预定飞行路线设置,便于通过肉眼直接观察并进行无人机飞行训练过程中的路线比对,学员通过观察激光投影装置在地面的投影点与路线定位装置之间的偏差,对系留无人机进行位置和方向修正,达到提高训练效率的目的。
19.(2)本实用新型中,系留无人机的供电单元与地表电源连接,通过线缆收放单元上的线缆向机体的无人机电缆供电,避免在飞行训练过程中频繁更换无人机的锂电池,导致训练效率低下。
20.(3)本实用新型中,控制单元分别与机体、供电单元和线缆收放单元连接,用于接收和处理各个单元发出的信号,并向各个单元发出动作指令。
21.(4)本实用新型中,开关电源分别与机体、线缆收放单元和控制单元连接,可将由插头接入的220v市电转换为12v直流电源,然后给机体和各个单元实现持续供电。
22.(5)本实用新型中,线缆缠绕在卷筒上,通过驱动电机带动卷筒旋转,从而实现线缆随机体的升降而实现收放,避免线缆散落在飞行场地刮至地面造成飞行事故。
23.(6)本实用新型中,线缆的两端均设有导电滑环,避免机体旋转或卷筒旋转导致线缆缠绕。
24.(7)本实用新型中,飞控将其飞行状态信息打包经由串口发给数传天空端,数传天空端通过无线传输至数传地面端,再通过串口发给控制板,控制板对信号进行解码得到机体的高度变化率,然后根据高度变化率向电机驱动器输出控制信号,从而通过驱动电机的正转或反转实现线缆的收放。
25.(8)本实用新型中,激光投影装置为激光投影灯,激光投影灯会向地面投射红色箭头状图像,且红色箭头状图像与机体当前机头方向保持一致,使学员能够快速得知机体目前的飞行姿态及飞行位置。当进行无人机360
°
自旋训练时,可通过观察红色箭头是否超过地表划定的旋转范围来确认是否存在偏差。在进行8字飞行训练过程中,若红色箭头状图像处于圆环的内圈和外圈之间,则表明机体当前飞行位置没有偏差;若红色箭头和圆环相切,则表明机体当前的飞行方向无偏差。学员在训练过程中通过观察投射到地面的红色箭头即可快速对无人机的机体进行位置和方向修正,增加了视觉反馈机制,减少视觉差对飞行训练的影响,提高训练效率。
26.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
27.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的
示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
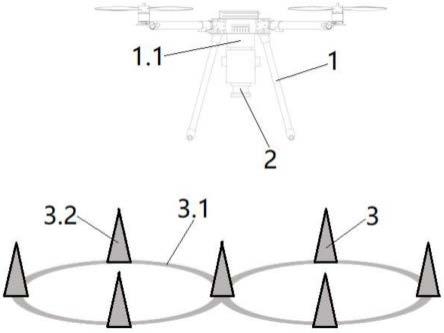
28.图1是无人机飞行训练过程中的预定飞行路线示意图;
29.图2是本技术实施例中的一种基于激光投影的无人机飞行训练系统的结构示意图;
30.图3是本技术实施例中系留无人机的结构示意图;
31.图4是本技术实施例图3中供电单元、线缆收放单元和控制单元的结构示意图;
32.图5是本技术实施例图3中系留无人机机体的结构示意图;
33.其中,1、系留无人机,1.1、机体,1.1.1、无人机电缆,1.2、供电单元,1.2.1、插头,1.2.2、开关电源,1.3、线缆收放单元,1.3.1、线缆,1.3.2、卷筒支架,1.3.3、卷筒,1.3.4、驱动电机,1.3.5、导电滑环,1.4、控制单元,1.4.1、飞控,1.4.2、数传天空端,1.4.3、数传地面端,1.4.4、控制板,1.4.5、电机驱动器,2、激光投影装置,3、路线定位装置,3.1、路线标识,3.2、定位锥桶。
具体实施方式
34.以下结合附图对本实用新型的实施例进行详细说明,但是本实用新型可以根据权利要求限定和覆盖的多种不同方式实施。
35.实施例:
36.参见图1至图5,一种基于激光投影的无人机飞行训练系统,本实施例应用于无人机相关专业的飞行操控实训课程中。
37.一种基于激光投影的无人机飞行训练系统,参见图2,包括系留无人机1(图2仅示意系留无人机1的机体1.1部分)、激光投影装置2和路线定位装置3;所述激光投影装置2设置于系留无人机1的机体1.1上,用于在地面上实时投射系留无人机1的实际飞行路线,所述路线定位装置3沿图1所示的预定飞行路线设置,用于进行无人机飞行训练过程中的路线比对,学员通过观察激光投影装置2在地面的投影点与路线定位装置3之间的偏差,对系留无人机进行位置和方向修正,达到提高训练效率的目的。
38.参见图3,所述系留无人机1为系留多旋翼无人机,包括供电单元1.2、线缆收放单元1.3和控制单元1.4;所述供电单元1.2与地表电源连接,通过线缆收放单元1.3上的线缆1.3.1向机体1.1的无人机电缆1.1.1供电,避免在飞行训练过程中频繁更换无人机的锂电池,导致训练效率低下;所述控制单元1.4分别与机体1.1、供电单元1.2和线缆收放单元1.3连接,用于接收和处理各个单元发出的信号,并向各个单元发出动作指令。
39.参见图4,所述供电单元1.2包括插头1.2.1和开关电源1.2.2,所述插头1.2.1用于实现地表电源和开关电源1.2.2之间的连接;所述开关电源1.2.2分别与机体1.1、线缆收放单元1.3和控制单元1.4连接,用于分别向各个单元实现供电管理。本实施例中的开关电源1.2.2为12v开关电源,可将由插头1.2.1接入的220v市电转换为12v直流电源,然后给机体1.1和各个单元实现持续供电。
40.所述线缆收放单元1.3包括卷筒支架1.3.2、卷筒1.3.3和驱动电机1.3.4;所述卷筒1.3.3和驱动电机1.3.4均设置在卷筒支架1.3.2上,所述线缆1.3.1缠绕在卷筒1.3.3上,通过驱动电机1.3.4带动卷筒1.3.3旋转,从而实现线缆1.3.1随机体1.1的升降而实现收
放,避免线缆散落在飞行场地刮至地面造成飞行事故。本实施例中,驱动电机1.3.4为步进电机。
41.所述线缆1.3.1的两端均设有导电滑环1.3.5,其中一个导电滑环1.3.5设置在卷筒支架1.3.2上,用于实现线缆1.3.1与供电单元1.2之间的连接;另一个导电滑环1.3.5设置在线缆1.3.1和无人机电缆1.1.1之间,避免机体1.1旋转或卷筒1.3.3旋转导致线缆1.3.1缠绕。
42.参见图4和图5,所述控制单元1.4包括飞控1.4.1、数传天空端1.4.2、数传地面端1.4.3、控制板1.4.4和电机驱动器1.4.5;所述飞控1.4.1和数传天空端1.4.2均设置于机体1.1上;所述控制板1.4.4分别与数传地面端1.4.3和电机驱动器1.4.5连接,所述电机驱动器1.4.5与驱动电机1.3.4连接。
43.所述机体1.1上设有与所述飞控1.4.1连接的传感器;所述传感器为位移传感器、速度传感器或拉力传感器中的一种,用于检测机体1.1的飞行状态;本实施例中,传感器为位移传感器。
44.本实施例中,飞控1.4.1为开源pixhawk飞控,控制板1.4.4为arduino控制板;飞控1.4.1采用mavlink协议将其飞行状态信息打包经由串口发给数传天空端1.4.2,数传天空端1.4.2通过无线传输至数传地面端1.4.3,再通过串口发给控制板1.4.4,控制板1.4.4对mavlink信号进行解码得到机体1.1的高度变化率,然后根据高度变化率向电机驱动器1.4.5输出控制信号,控制信号的产生规则如下:
45.当高度变化率》0.05m/s时,arduino控制板的d2引脚输出为低电平,d3引脚循环输出500us的高电平和500us的低电平,其中d2引脚和d3引脚分别连接至电机驱动器1.4.5(即驱动板a4988)的dir和step引脚,最终控制驱动电机1.3.4逆时针转动,带动卷筒1.3.3进行放电缆操作;
46.当高度变化率《-0.05m/s时,arduino控制板的d2引脚输出为高电平,d3引脚循环输出500us的高电平和500us的低电平,其中d2引脚和d3引脚连接电机驱动器1.4.5的方式同上,最终控制驱动电机1.3.4顺时针转动,带动卷筒1.3.3进行收电缆操作;
47.当-0.05m/s《高度变化率《0.05m/s时,意味着无人机的机体1.1处于悬停状态,arduino控制板无任何控制指令输出,卷筒1.3.3不动作。
48.本实施例中,所述激光投影装置2为激光投影灯,所述激光投影装置2设置于机体1.1的底部,其投影方向正对于地面。激光投影灯会向地面投射红色箭头状图像,且红色箭头状图像与机体1.1当前机头方向保持一致,使学员能够快速得知机体1.1目前的飞行方向及飞行位置。当进行无人机360
°
自旋训练时,可通过观察红色箭头是否超过地表划定的旋转范围来确认是否存在偏差。
49.所述路线定位装置3包括设置于地面的路线标识3.1和定位锥桶3.2。本实施例中,为实现“8”字飞行训练,路线标识3.1为两个相切的圆环标识。圆环的外径为12m,且圆环的内圈和外圈之间间隔1m(即圆环宽度为1m),在“8”字飞行训练的路线标识3.1上设有7个定位锥桶3.2。系留无人机在进行8字飞行训练过程中,若红色箭头状图像处于圆环的内圈和外圈之间,则表明机体1.1当前飞行位置没有偏差;若红色箭头和圆环相切,则表明机体1.1当前的飞行方向无偏差。学员在训练过程中通过观察投射到地面的红色箭头即可快速对无人机的机体1.1进行位置和方向修正,减少视觉差对飞行训练的影响,提高训练效率。学员
在训练过程中,可以直观、快速、准确做出无人机轨迹和姿态的修正,训练准确度和效率大幅提升。
50.一种基于激光投影的无人机飞行训练系统的使用方法如下:
51.步骤一:将激光投影装置2设置于机体1.1上,将机体1.1的无人机电缆1.1.1通过导电滑环1.3.5与线缆1.3.1连接;在飞行训练区域的地面设置路线定位装置3(即路线标识3.1和定位锥桶3.2);
52.步骤二:将供电单元1.2的插头1.2.1与地表电源连接,通过开关电源1.2.2向机体1.1、线缆收放单元1.3和控制单元1.4持续供电;
53.步骤三:控制系留无人机1的机体1.1,使其飞行至高空,飞行过程中通过线缆收放单元1.3对线缆1.3.1实现收放;激光投影装置2得电,向地面投射红色箭头状图像,学员根据地面的红色箭头与路线定位装置3之间的关系对机体1.1的飞行位置和飞行方向实现控制和修正。
54.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1