一种教学用智能网联汽车传感器实训台的制作方法
1.本实用新型涉及实训台领域,尤其涉及一种教学用智能网联汽车传感器实训台。
背景技术:
2.目前,市面上自动驾驶汽车技术的不断升级使得职业院校设备更新不及,并且目前市面上存在的汽车自动驾驶实训台采购成本高,进而在一定程度上影响了职业学院对汽车专业教学的影响,因此在使用时存在一定的弊端。
3.针对现有的职业学院汽车专业所使用的教学设备版本过低,并且目前市面上存在的汽车自动驾驶实训台,由于其采购成本过高,进而导致职业学院无法及时的对设备进行更新,因此影响教学质量的问题,我们提出一种教学用智能网联汽车传感器实训台。
技术实现要素:
4.本实用新型提出的一种教学用智能网联汽车传感器实训台,解决了现有的职业学院汽车专业所使用的教学设备版本过低,并且目前市面上存在的汽车自动驾驶实训台,由于其采购成本过高,进而导致职业学院无法及时的对设备进行更新,因此影响教学质量的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种教学用智能网联汽车传感器实训台,包括实训台,所述实训台的顶部固定安装有放置板,且所述放置板的顶部设置有模拟设备,且所述模拟设备的顶部设置有模拟汽车,所述模拟汽车的内部搭载有控制组件,且所述模拟汽车的顶部设置有摄像组件。
7.优选的,所述控制组件的外侧依次链接有故障诊断模块、雷达模块、数据检测模块与导航模块,所述控制组件与摄像组件电性连接。
8.优选的,所述雷达模块包括超声波雷达、毫米波雷达与激光雷达,所述雷达模块与上位机软件无线连接。
9.优选的,所述毫米波雷达提供can/canfd数据输出,至少包含跟踪目标id、距离、速度、rcs信息,所述激光雷达提供百兆以太网数据输出,包含距离、旋转角度、反射率信息。
10.优选的,所述导航模块具有gnss和imu组合导航定位,且所述导航模块具备rtk差分定位功能,用于进行rtk差分定位系统原理教学实训,且所述导航模块具备双rtk天线。
11.优选的,所述模拟设备包括模拟道路、障碍物、车位以及红绿灯,所述放置板的顶部固定安装有护板,且所述护板与模拟设备套接。
12.本实用新型的有益效果为:
13.1、雷达模块可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定,通过激光雷达感知算法控件,通过调节探测范围、滤波阈值、分割参数等参数,改变点云识别状态并对障碍物进行标识,实现对激光雷达识别算法的理解,可以测出障碍物与试验台自身的真实距离,设置安全区域,安全区域内障碍物将被标志识别,多种数据源输入,可调用激光雷达实时数据,录制的数据包、仿真实训台输出点云。
14.2、摄像模块可提供目标识别算法和车道线识别算法,通过加载不同识别算法,界面显示不同的识别功能,进行不同项目的功能实训,多种数据源输入,可调用摄像头实时数据、录制的数据包、视频图像、仿真实训台输出图像。
15.3、导航模块进行组合导航标定,包括初始对准、导航模式配置、坐标轴配置、端口输出数据配置等,接收组合导航数据信息,可以实时读取gnss卫星数据及惯导姿态数据,可对定位误差设置、解析定位误差、校准定位精度,设备具备rtk差分定位功能,可进行rtk差分定位系统原理教学实训,具备双rtk天线,进行相关定向实训。
16.综上所述,该装置通过内部设置的雷达模块便于设置安全区域并识别障碍物,同时摄像模块便于通过识别不同算法进行不同项目的功能实训,并且该装置相较于现有的教学设备,产品尺寸小,成本低,更加利于职业院校汽车专业的教学。
附图说明
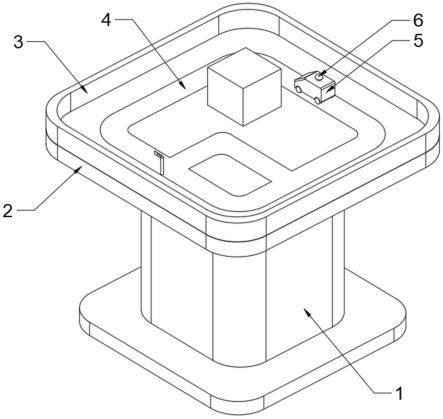
17.图1为本实用新型的结构示意图。
18.图2为本实用新型控制组件的连接结构框图。
19.图3为本实用新型雷达模块的内部结构框图。
20.图中标号:1、实训台;2、放置板;3、护板;4、模拟设备;5、模拟汽车;6、摄像组件。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图1-图3所示,一种教学用智能网联汽车传感器实训台,实训台1的顶部固定安装有放置板2,且放置板2的顶部设置有模拟设备4,且模拟设备4的顶部设置有模拟汽车5,模拟汽车5的内部搭载有控制组件,且模拟汽车5的顶部设置有摄像组件6。
23.如图2、图3所示,控制组件的外侧依次链接有故障诊断模块、雷达模块、数据检测模块与导航模块,控制组件与摄像组件6电性连接,雷达模块包括超声波雷达、毫米波雷达与激光雷达,雷达模块与上位机软件无线连接,毫米波雷达提供can/canfd数据输出,至少包含跟踪目标id、距离、速度、rcs信息,激光雷达提供百兆以太网数据输出,包含距离、旋转角度、反射率信息,导航模块具有gnss和imu组合导航定位,且导航模块具备rtk差分定位功能,用于进行rtk差分定位系统原理教学实训,且导航模块具备双rtk天线;
24.激光雷达水平视角为360度;垂直视角不低于30,测距不低于50m,测距精度为
±
10cm,测距通道不低于16线,同时提供百兆以太网数据输出,包含距离、旋转角度、反射率等信息,工作温度至少满足:-20℃-85℃,工作电压为9-32v,防护等级不低于ip67;
25.毫米波雷达水平视角为远距
±
15
°
/75m、短距
±
60
°
/30m,垂直视角不低于
±5°
,测距为远距不低于2m-75m、短距不低于0.6m-30m,测距精度不低于:远距
±
1m、短距
±
0.3m,最大目标数:不少于32,探测目标类型为:远离目标、靠近目标、静止目标、横穿静止目标、横穿目标,物体类型为杆、小汽车、卡车、行人、摩托车、单车、宽的物体,且提供can/canfd数据输出,至少包含跟踪目标id、距离、速度、rcs等信息,工作温度至少满足:-40℃-85℃,工作电压:9-16v,)防护等级不低于ip67;
26.超声波雷达:测距范围:130mm―5000mm,盲区13cm,波束角10~60度可调,处理板和探头工作温度-40~85度,精度:5mm(近距离)探测距离的0.5%(远距离),工作电源:+12v~24v,工作电流:《200ma;
27.摄像组件6分辨率为:1920*1080,焦距为6mm,工作温度-20℃-50℃,且配备usb3.0接口,同时探测目标类型车辆、行人、交通标志、红绿灯等;
28.导航模块具有gnss和imu组合导航定位,gnss/bd信号良好时位置误差精度不高于10cm,航向角误差精度不高于1
°
,同时gnss信号丢失时,位置偏差10m以内维持时间不低于3s,数据更新频率不低于100hz,并且支持rs-232/485、网口等接口,包含组合导航主机、2个卫星天线及连接线等,工作温度至少满足:-30℃-70℃,工作电压:9-32v,防护等级不低于ip65。
29.如图1所示,模拟设备4包括模拟道路、障碍物、车位以及红绿灯,放置板2的顶部固定安装有护板3,且护板3与模拟设备4套接。
30.本实用新型在使用时,首先将该装置取出,并将该装置放置在适当位置处,同时将该装置与外界电源相连接,此时可正常使用该装置;
31.通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;进而接收激光雷达数据流,可视化显示点云,此时可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定,并且通过激光雷达感知算法控件,通过调节探测范围、滤波阈值、分割参数等参数,改变点云识别状态并对障碍物进行标识,进而实现对激光雷达识别算法的理解;同时可以测出障碍物与试验台自身的真实距离,设置安全区域,安全区域内障碍物将被标志识别;
32.通过软件进行摄像头的内参标定,生成标定文件;进而可加载不同的标定文件,观察摄像头的畸变矫正效果,提供目标识别算法和车道线识别算法;通过加载不同识别算法,界面显示不同的识别功能,进行不同项目的功能实训;
33.毫米波雷达内部搭载的系统可提供人机友好交流界面,可实时更改雷达参数设置,观测调试效果,可准确识别静态与动态障碍物,显示距离、速度、位置等数据;
34.超声波雷达可通过发送不同指令,超声波模块可返回不同探测模式的数据,可演示不同探测模式下的探测精度和探测范围;
35.导航模块便于进行组合导航标定,包括初始对准、导航模式配置、坐标轴配置、端口输出数据配置等;接收组合导航数据信息;可以实时读取gnss卫星数据及惯导姿态数据,可对定位误差设置、解析定位误差、校准定位精度。
36.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1