双层式智能制造实训平台的制作方法
1.本发明涉及实训平台技术领域,具体为双层式智能制造实训平台。
背景技术:
2.工业互联网与智能制造是基于物联网、互联网、云计算、大数据等新一代it技术,贯穿工业设计、生产、管理、服务等制造活动环节,具备深度信息自我感知、智能优化自我决策、精准控制自我执行等功能的先进制造过程、系统和模式的总称,智能制造的基本特征包括:以智能工厂作为载体、以生产关键制造环节智能化为核心、以端到端数据流为基础、以全面深度互联为支撑。
3.参考公开号为cn108597290a的智能制造实训平台,其主要用于智能制造领域的专业人才培养、实训学习和技术开发,本实训平台以工业机器人为核心,将机械、气动、运动控制、变频调速、编码器技术、plc控制技术等有机地进行整合,结构模块化,便于组合,实现对高速传输线上的不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配等训练,可以在此基础上进行产品柔性包装、零件组装、柔性打磨抛光、柔性工装焊接、视觉检测、agv物流输送等实际工业应用项目,根据上述可知,该实训平台虽具备多种功能,能够得到较好的应用,但其通常呈单层设计,难以将控制系统组件与执行机构组件区分设置,因不便于进行双层式设计,使得该实训平台的整体结构较为紧密,操控时较为不便,还需加以改善。
技术实现要素:
4.本发明的目的在于提供双层式智能制造实训平台,以解决上述背景技术中提出实训平台通常呈单层设计,难以将控制系统组件与执行机构组件区分设置,因不便于进行双层式设计,使得该实训平台的整体结构较为紧密,操控时较为不便的问题。
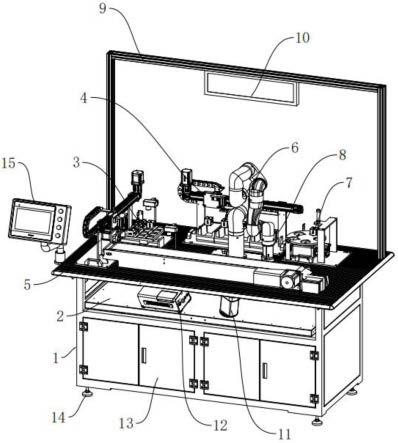
5.为实现上述目的,本发明提供如下技术方案:双层式智能制造实训平台,包括平台主体,所述平台主体顶端的一侧设置有龙门送料台,所述龙门送料台一端的平台主体顶部设置有视觉分析仪,所述龙门送料台一侧的平台主体顶端设置有生产流水线,所述生产流水线一端的平台主体顶部安装有开源机械臂,所述生产流水线一侧的平台主体顶端设置有仓库分拣台,所述仓库分拣台远离生产流水线一侧的平台主体顶端设置有冲压工作台,所述冲压工作台一端的平台主体顶部设置有机架,所述机架顶部的中心位置处安装有led显示屏,所述平台主体内部的一端设置有控制室,所述控制室的一端延伸至平台主体的外部。
6.优选的,所述平台主体底端的拐角位置处皆安装有支腿,相邻支腿关于平台主体的中心线对称,以便进行支撑处理。
7.优选的,所述控制室下方的平台主体表面通过合页安装有两组柜门,所述柜门关于平台主体的中心线对称,以便开启平台主体内部的存物室。
8.优选的,所述控制室底部的一侧设置有边缘计算主机,采用工控低功耗处理器,集
成高性能npu ai计算单元,能够在本地运行神经网络模型,提供机器视觉等ai人工智能算法应用。
9.优选的,所述龙门送料台一侧的平台主体外壁上通过支架安装有显示屏组件,以达到显示数据供人员观看的目的。
10.优选的,所述边缘计算主机一侧的控制室底部设置有多协议网关,采用工业级arm处理器,运行linux操作系统,内置智联网多网协议网关服务,经过mqtt数据服务与工业互联云平台通信。
11.与现有技术相比,本发明的有益效果是:该双层式智能制造实训平台不仅达到了双层式区分设计的目的,以使得该实训平台整体结构得到优化,进而提高了实训平台操控时的便捷性,还达到了高效实训执行的目的,而且达到了高效操控该实训平台的目的;
12.(1)通过位于平台主体的顶端分别设置龙门送料台、生产流水线、视觉分析仪、开源机械臂、冲压工作台与仓库分拣台等相关执行组件,且位于控制室的内部分别设置多协议网关与边缘计算主机等相关操控组件,以达到双层式区分设计的目的,以使得该实训平台整体结构得到优化,从而提高了实训平台操控时的便捷性;
13.(2)通过龙门送料台经视觉对待加工件进行智能识别,并根据任务需要选取相应的原材料工件输送带进行加工,生产流水线采用交流变频电机驱动,一点三米输送皮带,可以动态调整流水线的传输速度和远程启停操作,视觉分析仪采用高精度工业摄像头,支持自动聚焦和运动捕捉,结合ai智能视觉算法,提供任务调配、缺陷分拣、精准定位、目标识别等任务,开源机械臂采用高精度六轴机械臂,气泵吸盘,头部执行部件可更换,ros开源机器人操作系统,支持空间定位、自主路径、动态避障、智能抓取等任务,冲压工作台由加工工作台、模拟冲压机构组成,其中加工工作台由进料、加工、装配及出料等工位组成,可选用不同的控制技术实现其生产过程,仓库分拣台由三组仓库和取料机械手组成,能根据工作的需要按指定要求将加工好的成品件存入仓库的指定地点,从而达到高效实训执行的目的;
14.(3)通过边缘计算主机采用工控低功耗处理器,集成高性能npu ai计算单元,能够在本地运行神经网络模型,提供机器视觉等ai人工智能算法应用,多协议网关采用工业级arm处理器,运行linux操作系统,内置智联网多网协议网关服务,经过mqtt数据服务与工业互联云平台通信,led显示屏含工业组态屏,支持在线编程和控制,从而达到了高效操控该实训平台的目的。
附图说明
15.图1为本发明的三维结构示意图;
16.图2为本发明的正视结构示意图;
17.图3为本发明的俯视结构示意图;
18.图4为本发明的冲压工作台放大结构示意图。
19.图中:1、平台主体;2、控制室;3、龙门送料台;4、生产流水线;5、视觉分析仪;6、开源机械臂;7、冲压工作台;8、仓库分拣台;9、机架;10、led显示屏;11、多协议网关;12、边缘计算主机;13、柜门;14、支腿;15、显示屏组件。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.请参阅图1-4,本发明提供的一种实施例:双层式智能制造实训平台,包括平台主体1,平台主体1底端的拐角位置处皆安装有支腿14,相邻支腿14关于平台主体1的中心线对称;
22.控制室2下方的平台主体1表面通过合页安装有两组柜门13,柜门13关于平台主体1的中心线对称;
23.控制室2底部的一侧设置有边缘计算主机12;
24.边缘计算主机12一侧的控制室2底部设置有多协议网关11;
25.龙门送料台3一侧的平台主体1外壁上通过支架安装有显示屏组件15;平台主体1顶端的一侧设置有龙门送料台3,主控制器采用高性能西门子plc,采用激光扫描传感器,精确检测物料是否就位,采用十寸高性能hmi屏,具备良好人机交互功能,采用两坐标定位系统,具备极高的重复定位精度,采用高性能伺服电机,动作细分最高八千分之一,采用十二宫格料盘,满足多种加工场景要求,采用硅胶气嘴抓取机构配合真空检测机构,保证抓取准确无误;
26.龙门送料台3一端的平台主体1顶部设置有视觉分析仪5,采用全局曝光ccd,拍摄高速运动物体也无畸变,采用工业高像素ccd,ccd像素二百w,相机高速usb,保证数据传输无延迟,采用传统免驱接口硬件,即插即用,具有良好的兼容性与易用性,相机采用自动曝光自平衡,在无外接补光源情况下也具有良好的拍摄与识别效果;
27.龙门送料台3一侧的平台主体1顶端设置有生产流水线4,采用进口变频器控制,控制精度及稳定性高,采用交流变频电机配合齿轮变速箱结构,精确复现工业现场实际场景,变频调速速度范围零至一m/s,能够实现速度连续可调,采用高精度编码器实时测速及测距,保证测速测距高精度,具备皮带偏移及磨损实时监测功能,实时监测皮带健康状况,具备变频电机实时温度监测功能,实时监测电机健康状况,皮带长度一点三米,宽十六cm,极高的模拟了真实生产场景;
28.生产流水线4一端的平台主体1顶部安装有开源机械臂6,六自由度铝合金机器臂,有效载荷五kg,臂展七百mm,可重复零点一mm内的精细动作,内置一体化谐波减速器、无刷直流电机和十七位多圈绝对编码器,使机械臂关节经久耐用,支持真空动力吸盘和夹子等配件,内置碰撞检测,若碰到人或物品,机械臂可立刻停下保证学生实训的安全,内置blockly图形化编程工具,方便学生快速上手,兼容多种操作系统,包括macos、windows、linux;
29.生产流水线4一侧的平台主体1顶端设置有仓库分拣台8,采用四仓位存储设计,采用高精度步进电机设计,配合减速机构,实现直线行走,取料放料,采用高精度步进电机细分器,步进电机最高细分精度达到八千分之一,位置定位精度及其精准,采用气动取料放料设计,配合真空发生与检测结构,实现可靠的取料放料,采用光电和磁感检测传感器,精确检测动作执行状态,同时提供可靠的行走限位保护;
30.仓库分拣台8远离生产流水线4一侧的平台主体1顶端设置有冲压工作台7,采用气
动旋转盘设计,每个冲程完成一个分度的旋转,简单可靠,采用五工位设计,能够完成多种场景的加工模拟,采用进料出料检测设计,保证加工动作的准确无误,采用低噪声的mini冲压气缸,精确配合旋转台,完成冲压加工过程,所有活动部件安装位置传感器,精确监测每个动作的到位与归位状态,保证动作执行准确无误,旋转台旋转速度可手动调节;
31.冲压工作台7一端的平台主体1顶部设置有机架9,机架9顶部的中心位置处安装有led显示屏10,平台主体1内部的一端设置有控制室2,控制室2的一端延伸至平台主体1的外部。
32.本技术实施例在使用时,首先通过位于平台主体1的顶端分别设置龙门送料台3、生产流水线4、视觉分析仪5、开源机械臂6、冲压工作台7与仓库分拣台8等相关执行组件,且位于控制室2的内部分别设置多协议网关11与边缘计算主机12等相关操控组件,以达到双层式区分设计的目的,以使得该实训平台整体结构得到优化,之后通过龙门送料台3经视觉对待加工件进行智能识别,并根据任务需要选取相应的原材料工件输送带进行加工,生产流水线4采用交流变频电机驱动,一点三米输送皮带,可以动态调整流水线的传输速度和远程启停操作,视觉分析仪5采用高精度工业摄像头,支持自动聚焦和运动捕捉,结合ai智能视觉算法,提供任务调配、缺陷分拣、精准定位、目标识别等任务,开源机械臂6采用高精度六轴机械臂,气泵吸盘,头部执行部件可更换,ros开源机器人操作系统,支持空间定位、自主路径、动态避障、智能抓取等任务,冲压工作台7由加工工作台、模拟冲压机构组成,其中加工工作台由进料、加工、装配及出料等工位组成,可选用不同的控制技术实现其生产过程,仓库分拣台8由三组仓库和取料机械手组成,能根据工作的需要按指定要求将加工好的成品件存入仓库的指定地点,最后通过边缘计算主机12采用工控低功耗处理器,集成高性能npu ai计算单元,能够在本地运行神经网络模型,提供机器视觉等ai人工智能算法应用,多协议网关11采用工业级arm处理器,运行linux操作系统,内置智联网多网协议网关服务,经过mqtt数据服务与工业互联云平台通信,led显示屏10含工业组态屏,支持在线编程和控制,从而完成该实训平台的使用。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1