一种装甲车训练用的虚拟现实设备控制方法及控制系统
本发明涉及虚拟现实,特别涉及一种装甲车训练用的虚拟现实设备控制方法及控制系统。
背景技术:
1、装甲车训练用模拟器主要用于模拟特种装甲车辆的虚拟仿真,用于虚拟环境中的装甲车仿真功能,为特种车辆的培训提供设备。
2、现有技术中,通常采用两台模拟器设备进行联动仿真,其中一台用于模拟驾驶员操作,另一条用于模拟炮长操作,在两台模拟器设备进行联动仿真时,由于两台设备通过联网实现联动仿真,在实际的运动过程中,两台模拟器设备之间会存在一定的时间差,该时间差的存在将使得模拟训练过程中的运动不协调,很难完全复原装甲车在特殊地形下的驾驶工况,从而无法保证良好的模拟训练效果。
技术实现思路
1、基于此,本发明的目的是提供一种装甲车训练用的虚拟现实设备控制方法及控制系统,旨在解决现有技术中两台模拟器设备联动仿真时存在一定的时间差,将导致无法完全复原真实的驾驶工况,无法保证良好模拟训练效果的技术问题。
2、本发明的第一方面在于提供一种装甲车训练用虚拟现实设备的控制方法,应用于以装甲车训练用现实设备,所述设备包括驾驶模拟系统与炮长模拟系统,所述驾驶模拟系统用于控制虚拟现实设备进行第一类型运动以模拟装甲车进行运动,所述炮长模拟系统用于控制虚拟现实设备进行第二类型运动以模拟装甲车进行攻击、防御,所述控制方法包括:
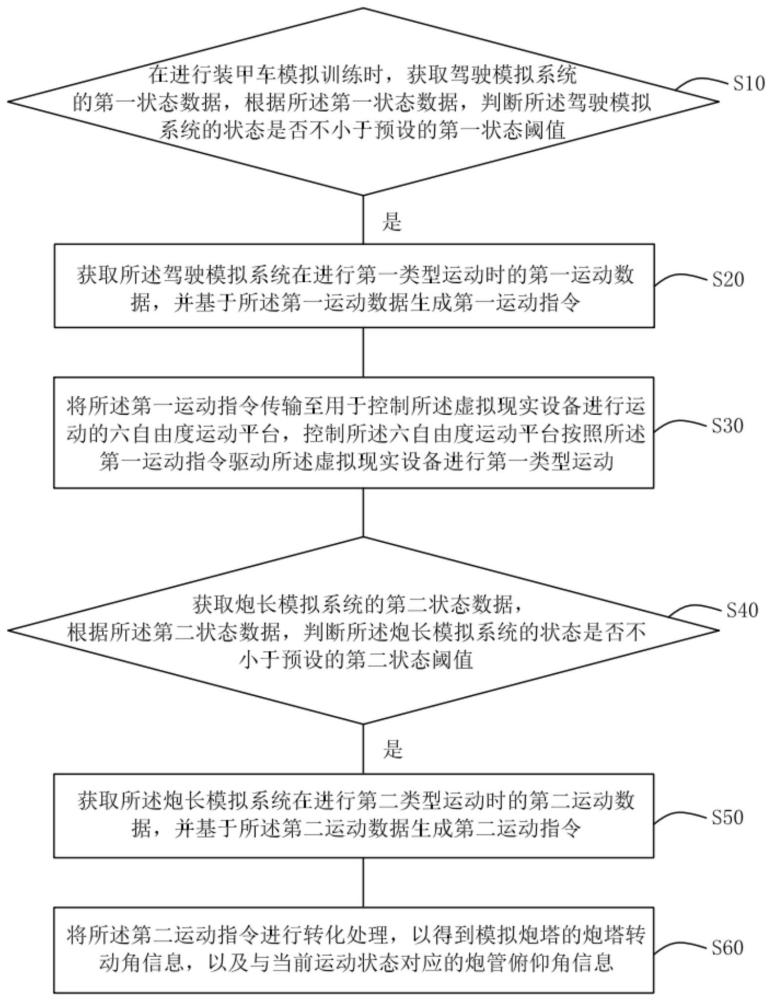
3、在进行装甲车模拟训练时,获取驾驶模拟系统的第一状态数据,根据所述第一状态数据,判断所述驾驶模拟系统的状态是否不小于预设的第一状态阈值;
4、若是,获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据,并基于所述第一运动数据生成第一运动指令;
5、将所述第一运动指令传输至用于控制所述虚拟现实设备进行运动的六自由度运动平台,控制所述六自由度运动平台按照所述第一运动指令驱动所述虚拟现实设备进行第一类型运动;
6、获取炮长模拟系统的第二状态数据,根据所述第二状态数据,判断所述炮长模拟系统的状态是否不小于预设的第二状态阈值;
7、若是,获取所述炮长模拟系统在进行第二类型运动时的第二运动数据,并基于所述第二运动数据生成第二运动指令;
8、将所述第二运动指令进行转化处理,以得到模拟炮塔的炮塔转动角信息,以及与当前运动状态对应的炮管俯仰角信息。
9、根据上述技术方案的一方面,获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据,并基于所述第一运动数据生成第一运动指令的步骤,具体包括:
10、在通过所述驾驶模拟系统进行第一类型运动时,获取进行第一类型运动时的多个第一时间节点及每个时间节点对应的节点动作,以获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据;
11、基于所述第一运动数据中的第一时间节点及每个时间节点对应的节点动作,生成用于控制虚拟现实设备的六自由度平台的第一运动指令。
12、根据上述技术方案的一方面,将所述第一运动指令传输至用于控制所述虚拟现实设备进行运动的六自由度运动平台,控制所述六自由度运动平台按照所述第一运动指令驱动所述虚拟现实设备进行第一类型运动的步骤,具体包括:
13、将所述第一运动指令传输至用于控制所述虚拟现实设备进行运动的六自由度运动平台;
14、对所述第一运动指令进行参数解析,控制所述六自由度运动平台按照所述第一运动指令进行第一类型运动;
15、对所述六自由度运动平台的运动进行姿态检测,判断所述六自由度运动平台的运动姿态是否符合第一时间节点与节点动作的对应关系。
16、根据上述技术方案的一方面,获取所述炮长模拟系统在进行第二类型运动时的第二运动数据,并基于所述第二运动数据生成第二运动指令的步骤,具体包括:
17、获取所述炮长模拟系统在进行第二类型运动时的第二运动数据,并基于所述第二运动数据生成第二运动指令的步骤,具体包括:
18、在通过所述炮长模拟系统进行第二类型运动时,获取进行第二类型运动时的多个第二时间节点及每个时间节点对应的节点动作,以获取所述炮长模拟系统在进行第二类型运动时的第二运动数据;
19、基于所述第二运动数据中的第二时间节点及每个时间节点对应的节点动作,生成用于控制虚拟现实设备的六自由度平台的第二运动指令。
20、根据上述技术方案的一方面,将所述第二运动指令进行转化处理,以得到模拟炮塔的炮塔转动角信息,以及与当前运动状态对应的炮管俯仰角信息的步骤,具体包括:
21、对所述第二运动指令进行参数解析;
22、基于所述第二运动指令的参数解析结果,对所述第二运动指令进行转化处理,以分别得到所述炮长模拟系统中模拟炮塔的炮塔转动角信息,以及与所述虚拟现实设备当前运动状态对应的炮管俯仰角信息。
23、根据上述技术方案的一方面,所述控制方法还包括:
24、按照所述第一运动指令驱动所述虚拟现实设备进行第一类型运动的过程中,按照所述第二运动指令控制所述炮长模拟系统中的模拟炮塔进行运动。
25、本发明的第二方面在于提供一种装甲车训练用虚拟现实设备的控制系统,应用于以装甲车训练用现实设备,所述设备包括驾驶模拟系统与炮长模拟系统,所述驾驶模拟系统用于控制虚拟现实设备进行第一类型运动以模拟装甲车进行运动,所述炮长模拟系统用于控制虚拟现实设备进行第二类型运动以模拟装甲车进行攻击、防御,所述控制系统包括:
26、第一数据处理模块,用于在进行装甲车模拟训练时,获取驾驶模拟系统的第一状态数据,根据所述第一状态数据,判断所述驾驶模拟系统的状态是否不小于预设的第一状态阈值;
27、第一指令生成模块,用于在所述第一数据处理模块判定驾驶模拟系统的状态不小于预设的第一状态阈值时,获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据,并基于所述第一运动数据生成第一运动指令;
28、第一指令执行模块,用于将所述第一运动指令传输至用于控制所述虚拟现实设备进行运动的六自由度运动平台,控制所述六自由度运动平台按照所述第一运动指令驱动所述虚拟现实设备进行第一类型运动;
29、第二数据处理模块,用于获取炮长模拟系统的第二状态数据,根据所述第二状态数据,判断所述炮长模拟系统的状态是否不小于预设的第二状态阈值;
30、第二指令生成模块,用于在所述第二数据处理模块判定炮长模拟系统的状态不小于预设的第二状态阈值时,获取所述炮长模拟系统在进行第二类型运动时的第二运动数据,并基于所述第二运动数据生成第二运动指令;
31、参数转化模块,用于将所述第二运动指令进行转化处理,以得到模拟炮塔的炮塔转动角信息,以及与当前运动状态对应的炮管俯仰角信息。
32、根据上述技术方案的一方面,所述第一数据处理模块具体用于:
33、获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据,并基于所述第一运动数据生成第一运动指令的步骤,具体包括:
34、在通过所述驾驶模拟系统进行第一类型运动时,获取进行第一类型运动时的多个第一时间节点及每个时间节点对应的节点动作,以获取所述驾驶模拟系统在进行第一类型运动时的第一运动数据;
35、基于所述第一运动数据中的第一时间节点及每个时间节点对应的节点动作,生成用于控制虚拟现实设备的六自由度平台的第一运动指令。
36、根据上述技术方案的一方面,所述第二数据处理模块具体用于:
37、获取所述炮长模拟系统在进行第二类型运动时的第二运动数据,并基于所述第二运动数据生成第二运动指令的步骤,具体包括:
38、在通过所述炮长模拟系统进行第二类型运动时,获取进行第二类型运动时的多个第二时间节点及每个时间节点对应的节点动作,以获取所述炮长模拟系统在进行第二类型运动时的第二运动数据;
39、基于所述第二运动数据中的第二时间节点及每个时间节点对应的节点动作,生成用于控制虚拟现实设备的六自由度平台的第二运动指令。
40、与现有技术相比,采用本发明所示的装甲车训练用虚拟设备及其控制方法,有益效果在于:
41、与现有技术相比,采用本实施例当中所示的装甲车训练用虚拟现实设备及其控制方法,有益效果在于:
42、在进行装甲车模拟训练时,通过采用装甲车训练用虚拟现实设备对装甲车进行运动模拟,通过获取与驾驶模拟系统对应的第一运动数据,并将其转化成用于控制六自由度运动平台的第一运动指令,以及通过获取与炮长驾驶模拟系统对应的第二运动数据,并将其转化成用于控制炮塔与炮管的第二运动指令,基于第一运动指令与第二运动指令实现虚拟现实设备的运动,从而实现对装甲车的运动模拟,用户通过该虚拟现实设备可以实现对装甲车的双重模拟控制,双重模拟相互协同,两者之间不存在时间差,从而能够保证装甲车模拟训练过程中的运动协同性,能够较好的复原装甲车在特殊地形下的驾驶工况,以保证良好的模拟训练效果。
- 还没有人留言评论。精彩留言会获得点赞!