一种月球环境下的仿生胃消化系统
本发明涉及一种月球环境下的仿生胃消化系统,属于仿生消化系统。
背景技术:
1、目前,体外消化技术通常使用静态消化或动态模拟消化装置。静态模型反应器具有结构简单、操作便携、造价低廉等优点,目前被广泛使用。常见的静态模型反应器是将烧杯放置在恒温磁力搅拌器上;或将锥形瓶放置在恒温震荡水浴槽中,通过搅拌或震荡模拟胃肠道的蠕动。但是静态模型反应器不能对人体胃肠道中动态消化过程进行模拟,无法控制严格的厌氧环境。
2、动态模型反应器能够对胃肠道中剪切、混合等物理过程进行模拟,还具有ph调控、物料流加、消化液分泌,代谢产物吸收等功能。目前主要的动态模型反应器主要有三种,其中tim是目前与人体胃肠道消化系统最相似的体外动态模型反应器,由tno胃小肠模型(tnogastro-intestinal model,tim-1)和tno胃模型(tno in vitro model of the colon,tim-2)组成。tim-2由四个相互连接的玻璃容器组成并形成一个循环回路,其内部为弹性壁,玻璃器壁与弹性壁之间通入循环水(模拟人体时循环水温度为37℃),周期性地对循环水施加压力,弹性壁收缩并产生蠕动波从而使内容物得到混合并在反应器内流动。
3、国内的仿生胃反应器(biomimetic gastric reactor,bgr),由三个连续的玻璃反应容器构成,按照胃底、胃体和胃窦排列,隔室反应器安装硅胶胃。中间件由加碱口、补料口、抽真空口、加样口、吸水装置、透析回流口、ph电极口构成。硅胶胃与隔室器壁之间充满37℃恒温超纯水,来模拟人体真实温度。此外,通过循环水槽、蠕动泵周期性地进行挤压,模拟胃蠕动。
4、但是目前的体外胃模拟消化装置不仅无法准确模拟失重环境下胃的蠕动情况与内部的消化进程,更不能模拟月球环境下胃的蠕动情况与内部的消化进程,对于研究未来登陆月球的航天员的胃道健康无法提供有益、可信的数据,且液体挤压蠕动消化与人体胃内的运动与真实情况相差较大,不能很好地模拟真实胃的情况。
5、传统的设备无法模拟食靡在胃的j型流态问题,同时由于现有技术的模型在蠕动模拟过程中存在无法模拟胃中真实的不规律的食靡流态技术缺陷,例如已公布的cn108318625a这件专利,只有一个出水口和一个进水口,在模拟蠕动时,仿生硅胶膜只受到垂直的力,导致模拟食靡无规则流动过程效果不好,对未来的月球环境下体外消化的研究造成局限。
6、另外,传统的技术设备缺少胃底与胃体之间的参数测定手段,无法更真实的确定和模拟胃内ph等理化参数。
技术实现思路
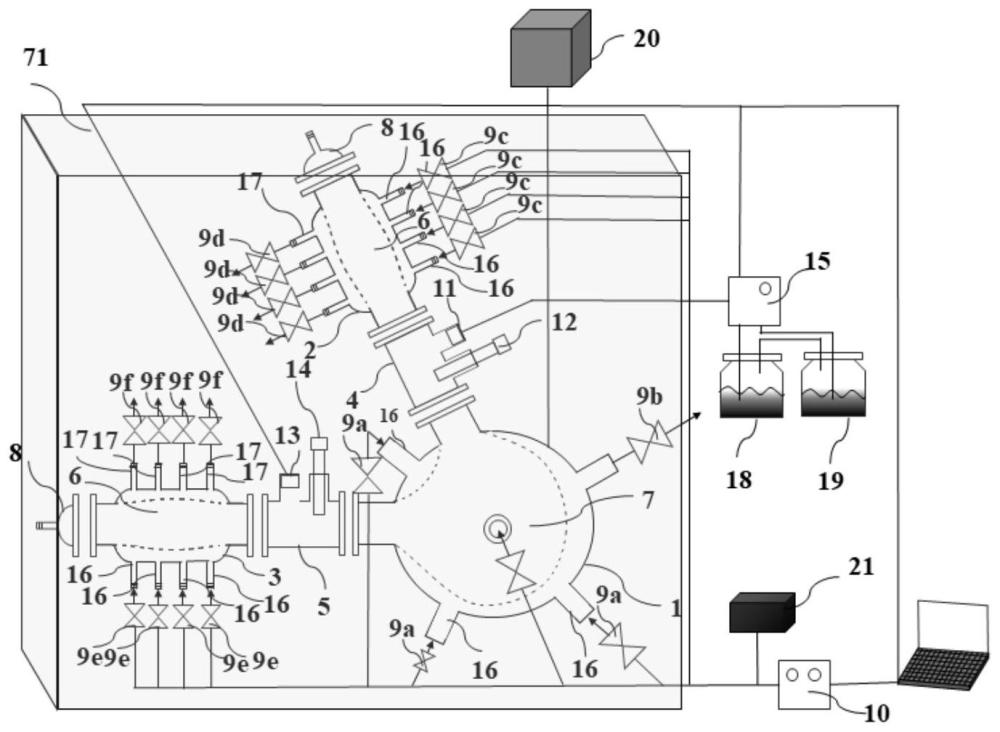
1、为了解决上述问题,本发明提供了一种月球环境下的仿生胃消化系统,包括反应器组、与所述反应器组连接的进样系统,所述反应器组包括球形反应器,所述球形反应器通过法兰和/或中间体分别连接对称设置的第一筒形反应器和第二筒形反应器,所述球形反应器、所述第一筒形反应器、所述第二筒形反应器均具有进气口和出气口,所述第一筒形反应器和所述第二筒形反应器均具有至少三个进气口和至少三个出气口;所述反应器组悬浮于水槽。
2、进一步地,所述进样系统包括蠕动泵、与所述蠕动泵连接的样品瓶和酸碱瓶,所述蠕动泵连接两个中间体。
3、进一步地,所述中间体具有进样口、电极口,所述进样口与所述蠕动泵连接,所述电极口插有ph电极。
4、在本发明的一种实施方式中,所述水槽中盛有的液体是密度为2-3mol/l的盐水。
5、进一步地,所述仿生胃消化系统内设置有从所述球形反应器内腔分叉延伸至第一筒形反应器内腔、第二筒形反应器内腔的仿生硅胶胃道,所述仿生硅胶胃道从第一筒形反应器内腔、第二筒形反应器内腔伸出后固定于第一筒形反应器的出口和第二筒形反应器的出口,所述第一筒形反应器的出口和第二筒形反应器的出口位于所述第一筒形反应器和第二筒形反应器远离所述中间体的一端。
6、在本发明的一种实施方式中,所述第一筒形反应器和所述第二筒形反应器均具有四个出气口和四个进气口且至少一个出气口、至少一个进气口连接有球阀;所述球形反应器具有至少三个进气口且均连接有球阀。
7、进一步地,每个所述球阀均连接温控系统和plc控制系统;所述第一筒形反应器的出口和第二筒形反应器的出口均连接有转接头和输出管,所述输出管上连接有鲁尔接头。
8、应当理解,所述仿生硅胶胃道是由硅胶材质制成的具有弹性的套袋结构,其可以外翻固定于法兰外侧;设置鲁尔接头的作用是方便取样。
9、应当理解,在进气口和出气口上设置球阀的目的是便于控制蠕动情况;设置温控系统是为了控制反应器的温度维持在37.5-38范围,目的是模拟真实人体胃肠道温度。
10、在本发明的一种实施方式中,第一筒形反应器和第二筒形反应器的蠕动压缩频率为3-5次/分钟,流速为2-4l/min,空气的充气量为350-750ml,压缩幅度为1.5-3.5cm;球形反应器的蠕动压缩频率为3-4次/分钟,流速为2-4l/min,空气的充气量为500ml-1l,压缩幅度为2.5-4.5cm。
11、在本发明的一种实施方式中,所述仿生胃消化系统在进料前,通过第一进料系统调控第一筒形反应器和球形反应器之间的中间体的ph处于1.0-1.5范围内、第二筒形反应器和球形反应器之间的中间体的ph处于1.5-2.0范围内;所述仿生胃消化系统在进料后,通过第一进料系统调控第一筒形反应器和球形反应器之间的中间体的ph处于2.0-3.0范围内、第二筒形反应器和球形反应器之间的中间体的ph处于3.0-4.0范围内。
12、应当理解,本发明通过水槽中液体给予整个模型的浮力以模拟失重环境下整个模型所受到的重力,并且本发明提供的液体密度参数仅针对模拟真空中月球天体表面的失重环境(约为地球的1/6重力),并非模拟真空中的非天体区域、空间站、太空舱等环境的重力。
13、由于受到月球重力影响,相较于在真空中的非天体区域、空间站、太空舱等环境下,胃肠道蠕动需要克服更多的力,因此为了更真实地模拟实际蠕动情况,胃的蠕动幅度不宜过大;同时,对于胃这样顺势而下的蠕动结构,流速不宜过小。
14、本发明的有益效果:
15、本发明通过设置悬浮于水槽中的仿生胃消化系统以构成模拟月球失重环境下的仿生胃消化系统,不仅能够模拟航天员在月球失重环境下胃中菌群分布和代谢情况,可深入研究航天员的在月球失重环境下的胃肠道消化问题,并开发航天食品,而且实现了自动化,能够根据预先设定好的程序,plc控制样品、消化液和缓冲液的加入,仿生胃消化系统的蠕动和排空,使操作更便捷。与传统模拟消化装置相比,本发明采用内套有柔性并具有弹性的硅胶仿生胃的玻璃反应器,可以实现对样品的保温;同时,本发明通过设置多通道的进出气口以形成玻璃瓶与硅胶仿生胃道之间的循环气体的压力对硅胶仿生胃道的挤压,实现效果更佳的往复运动,从而更真实地模拟在真实肠道的蠕动的情况下食物的消化;另外,本发明的中间体设置有多个插口,实现了对样品在模型内变化过程的实时观测,能够直接得到过程数据,该过程数据的收集能够为优化模型的操作参数提供参考;并且,各部分相对独立,方便拆卸和组装。
- 还没有人留言评论。精彩留言会获得点赞!