基于范德华力的压印脱模装置及脱模方法与流程
1.本发明涉及超精密制造技术领域,特别是涉及一种基于范德华力的压印脱模装置及脱模方法。
背景技术:
2.本申请中薄膜指纳米压印中压印胶固化后,压印胶和衬底的总称。本申请中模板与薄膜的粘合界面指的是模板与固化后压印胶的粘合界面。
3.模板与薄膜之间的分离是纳米压印中的一个很重要的步骤,关系到模板上图案(微结构)到压印胶的成功转印。
4.模板与薄膜之间进行脱模的方法有:手动脱模法,真空吸附拉脱法,吹气法,超声波震动法,低气压起模法。手动脱模法是最传统的通过双手脱模,模板与薄膜在脱模过程中会受力不均导致压印图案(微结构)受到损坏。真空吸附拉脱法是通过真空吸盘的真空吸力将模板和薄膜吸附的升降机构上,通过施加电场或者机械传动驱动升降机构的升降运动产生拉力,实现脱模。所谓吹气法是通过真空吸盘的真空吸力将模板和薄膜分别吸附到升降机构上,通过在模板与薄膜粘合的外部边缘界面吹入压缩空气,将模板与薄膜的外边缘分离。吹入的压缩空气产生的水平力结合升降机构的向下向上运动产生的拉力,实现模板与薄膜从四周到中心连续脱模。超声波振动法是通过真空吸盘的真空吸力将模板和薄膜分别吸附到升降机构上,施加超声波,利用固化后压印胶与模板弹性模量从差异和对超声波的吸收能力不同,导致压印胶与模板产生不同的振动位移使得模板与压印胶之间的粘合力下降,结合外部升降机构通过真空吸盘在模板和薄膜上产生拉力,实现脱模。低气压起模法是通过真空吸盘的吸力将薄膜吸附固定,模板尺寸很大,模板将脱模腔分为了上腔和下腔,上下腔不连通。模板一部分中心圆形区域与薄膜粘合,薄膜所在的下腔为低压压力环境,上腔为真空环境,通过下腔低压压力作用在模板上产生拉力,从四周向中心脱模。
5.由于模板与薄膜之间紧密粘连,为了在模板和薄膜上施加方向相反的拉力,目前脱模方法普遍特点是:利用外部气压与真空吸盘的压差力,将模板或/和薄膜吸附固定在真空吸盘上,通过使两个真空吸盘产生相对位移,从而在模板与薄膜之间施加拉力实现脱模。由于待脱模的模板与压印胶之间不存在空气,相比于外部气压是负压,存在压差力的作用,压差力远远大于脱模力。脱模过程中,拉力不仅需要克服压印胶与模板之间的粘合力,还需要克服压差力。即使对压印胶和模板进行了抗粘连处理,在压印胶和模板分离时,由于压差力的作用,依然会出现压印图案(微结构)断裂受损导致模板和薄膜损坏。
技术实现要素:
6.本发明所要解决的技术问题是提供一种基于范德华力的压印脱模装置及脱模方法,实现对大尺寸晶圆的模板与薄膜之间的一次性保留完整微结构的脱模。
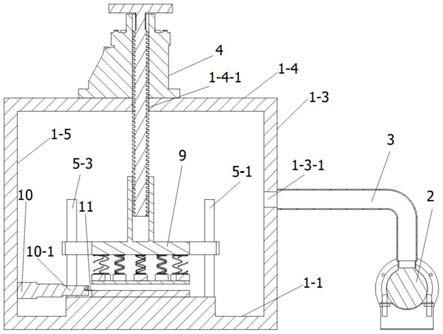
7.本发明解决其技术问题所采用的技术方案是:提供一种基于范德华力的压印脱模装置,包括真空腔箱体,所述真空腔箱体内设置有基平台,所述基平台用于放置待脱模的模
板与薄膜,所述真空腔箱体内还包括升降平台和起模刀;所述升降平台在靠近所述基平台的一面设置有吸附单体,所述吸附单体能够与所述待脱模的薄膜产生范德华力;所述起模刀用于切入所述待脱模的模板与薄膜的粘合界面,且刀面与所述粘合界面始终保持共面。
8.所述吸附单体有多个,其中,一个吸附单体布置在所述待脱模的模板与薄膜之间粘连力最小的位置,其余吸附单体布置在与所述粘连力最小的位置与所述待脱模的模板的中心位置的连线相互垂直的若干揭开线上。
9.所述揭开线沿着所述边缘位置与所述待脱模的模板的中心位置的连线均匀分布。
10.所述揭开线的两端分别布置一个所述吸附单体,两个所述吸附单体之间均匀分布若干个所述吸附单体。
11.位于升降平台最外圈的吸附单体的包络圆与所述待脱模的薄膜的外圆重合。
12.所述吸附单体包括弹性件和吸附盘,所述弹性件的一端与所述升降平台相连,另一端与所述吸附盘相连,所述吸附盘与所述待脱模的薄膜接触的一面为能够产生范德华力的仿生吸附结构。
13.所述升降平台包括基圆盘,所述基圆盘的中心位置设置有套筒,所述基圆盘的边缘设置有导向轮毂;所述导向轮毂末端设置有一个通孔,所述通孔与位于所述真空腔箱体内的导柱相配合所述套筒与位于所述真空腔箱体内的丝杠电机的丝杆螺纹配合,通过丝杆的旋转带动升降平台沿着所述导柱产生上升运动和下降运动。
14.所述起模刀安装在直线推动器的推杆上,所述直线推动器固定安装在所述真空腔箱体的内侧壁,所述推杆推动所述起模刀切入所述待脱模的模板与薄膜的粘合界面,切入过程中,所述起模刀的刀面始终保持与所述粘合界面共面。
15.所述真空腔箱体的侧面设有圆形贯通孔,所述圆形贯通孔上安装有抽气管,所述抽气管的另一端安装在真空抽气机上。
16.本发明解决其技术问题所采用的技术方案是:还提供一种基于范德华力的压印脱模方法,采用上述的压印脱模装置,包括以下步骤:
17.(1)将待脱模的模板与薄膜放置在基平台的脱模部位;
18.(2)将所述真空腔箱体调整为真空状态;
19.(3)下降所述升降平台,使得所述吸附单体的底部与所述待脱模的薄模接触,并在所述吸附单体与所述待脱模的薄膜之间产生范德华力,停止下降所述升降平台;
20.(4)起模刀运动到所述待脱模的模板与薄膜的粘合界面处,并沿着粘合界面切入,切入后,起模刀停止运动并保持所在位置;
21.(5)缓慢上升所述升降平台,向上的拉力逐渐增大到大于所述起模刀切入点的粘附力,所述起模刀切入点的薄膜与模板脱离,粘附力最小部位传递到下一揭开线,升降平台继续缓慢上升,拉力继续增大到大于揭开线处的拉力,使得薄膜与模板分离;
22.(6)脱模完成,去除薄膜与模板。
23.有益效果
24.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明提出在真空环境下进行脱模,由于压印胶和模板间不存在空气,而外部为真空,因此从根本上消除了脱模过程中压差力。由于真空环境无法利用压差力将模板(和/或薄膜)吸附固定在真空吸盘上,本发明提出使用能够产生范德华力(分子间作用力)的仿生吸
上,并且顶部平面壁1
‑
4上有与丝杆相配的通孔1
‑4‑
1;导柱5有4根5
‑
1、5
‑
2、5
‑
3、5
‑
4,导柱5通过螺纹连接固定在真空腔箱体的底部平面壁1
‑
1上,安装时导柱5的轴线与基平台1
‑
2垂直。模板6牢固放置在基平台1
‑
2上,模板6为圆形晶圆,其上面紧密粘连有薄膜7,薄膜7包括衬底7
‑
2、固化后的压印胶7
‑
1。吸附单体8固定连接在升降支撑平台9的下表面9
‑
1;升降支撑平台9的套筒9
‑
2的内圆柱面有螺纹,与丝杆电机4的丝杆形成螺纹配合;升降支撑平台9的导向轮毂9
‑
3上有与导柱5相配合的通孔9
‑
4,升降支撑平台9的通孔9
‑
4套在导柱5上。
41.直线推动器10固定安装在真空腔箱体1竖直壁内侧壁1
‑
5,起模刀11固定安装在直线推动器10的推杆10
‑
1上,直线推动器10的安装位置需要保证起模刀11的刀面11
‑
1与模板6上表面6
‑
1共面,并且起模刀11的刀刃11
‑
2切入位置为模板a点。
42.图3a
‑
图3c所示为升降支撑平台9和吸附单体的装配图,升降支撑平台9包括套筒9
‑
2、基圆盘9
‑
5、4个均布的导向轮毂9
‑
3,每个导向轮毂9
‑
3末端有一个与导柱配合的通孔9
‑
4。套筒内圆柱面有螺纹,与丝杆电机的丝杆相配合。升降支撑平台9的4个通孔9
‑
4套在4个固定的导柱5上,限制了升降支撑平台9的旋转自由度。丝杆电机9的丝杆旋转运动带动升降支撑平台9沿着导柱5产生上升和下降运动。
43.图3a和图3b中吸附单体8包括弹簧8
‑
2和吸附盘8
‑
1。弹簧8
‑
2一端固连在升降支撑平台9的下表面9
‑
1上,另一端固连在吸附盘8
‑
1的上表面,弹簧8
‑
2的轴线同时垂直于升降支撑平台9的下表面9
‑
1和吸附盘8
‑
1的上表面。未脱模时,弹簧8
‑
2处于原长;脱模过程中,弹簧8
‑
2两端受拉力而伸长;脱模结束后,弹簧8
‑
2两端拉力消失,弹簧8
‑
2恢复原长。
44.吸附盘8
‑
1的下表面8
‑1‑
1是能够产生范德华力(分子间作用力)的仿生吸附结构,比如仿壁虎结构,如图6所示;又比如仿昆虫足部结构,实现法向吸附切向脱离的有向性吸附,如图7所示;或者仿海洋生物微刺结构,通过在微结构上通断电实现吸附与释放,如图8所示。当仿生吸附结构的下表面8
‑1‑
1贴附在薄膜7的上表面7
‑2‑
1时,会在薄膜的上表面7
‑2‑
1与吸附盘的下表面8
‑1‑
1之间产生范德华力(分子间作用力),从而将薄膜7与吸附盘8
‑
1连接在一起。范德华力不依赖于空气,在真空中也存在,因此该吸附结构具有很广的适用范围。如图4a
‑
4b所示,脱模时,升降支撑平台9向上运动,弹簧8
‑
2受拉产生弹力(f1)作用在吸附盘上与范德华力(f2)平衡,范德华力作用在薄膜上,克服薄膜与模板之间的粘附力(f3),将薄膜与模板分开。
45.多个吸附单体8按照特定规律固定在升降支撑平台9的下表面9
‑
1,图3c和4c展示了吸附单体的排列规律:吸附单体沿着揭开线l1、l2
……
l3分布,每条揭开线上优先在两端布置吸附单体,其次按照合适的间隔在两端吸附单体之间均布若干个吸附单体。其中,揭开线是与粘附力的薄弱部位a与所述待脱模的模板的中心位置o的连线相互垂直的直线。粘附力的薄弱部位a位于边缘位置,因为在起模过程中,在边缘的某一处(a点),模板与薄膜之间的粘连力,比模板与薄膜相连的其他任何地方都要小。
46.真空环境下脱模时,在模板6与薄膜7粘合界面边缘a点插入起模刀,起模刀刃口很薄,插入长度很小,从而将a点及其附近区域薄膜与模板分离开,则a点附近区域的粘附力(f
min
)比任何地方的粘附力(f
normal
)都要小,a点是粘附力的薄弱部位。采用揭开式整体控制脱模方法,升降支撑平台9逐渐上升,每个吸附单体的弹簧伸长量相同且逐渐变大,弹力f1逐渐变大,则范德华力f2也逐渐变大。当f2数值大于f
min
时,a点附近区域最先脱模。a点脱模后,a1点成为粘附力的薄弱部位,升降支撑平台9继续缓慢上升,范德华力增大,使得a1点脱
模,随后a2点成为粘附力的薄弱部位,以此类推,粘附力的薄弱部位从a点连续地传递到与a相对的a3点;在二维上,粘附力的薄弱部位是线,表现为脱模过程的
‘
揭开线’向ao方向从a点连续传递到直线l1、l2、l3,最后传递到a3点,并且
‘
揭开线’基本与ao直线垂直。
47.根据揭开式整体控制脱模方法的
‘
揭开线’传递规律以及吸附单体8的尺寸,选择合适间距的若干条揭开线,在每条揭开线上优先在揭开线的两端布置吸附单体,其次按照合适的间隔在两端吸附单体之间均布若干个吸附单体,以保证每个吸附单体产生的范德华力(f2)在薄膜上均匀分布,承担其周围区域相同大小的粘附力(f3)。最终达到的效果是,位于升降支撑平台最外圈的吸附单体的包络圆应该尽可能与薄膜的外圆重合,使得最外圈的吸附单体尽可能靠近薄膜的边缘(因为薄膜与模板黏附界面的边缘的粘附力比较大,因此需要保证边缘上的范德华力足够克服粘附力)。
48.图5展示了揭开式整体控制脱模方法脱模过程示意图,整个脱模过程中,脱模角极小,揭开过程近似为:保持薄膜整个平面不弯曲,绕着与粘连力最小部位(a点)相对的点(a3点)为转动中心,薄膜整个平面旋转角度为极小的脱模角,实现脱模。
49.揭开式整体控制脱模方法的步骤为:
50.步骤1:真空腔箱体1的门1
‑
7打开,将待脱模的模板6与薄膜7牢固放置在基平台1
‑
2的脱模部位,随后将真空腔箱体1的门1
‑
7关闭。
51.步骤2:真空抽气机2工作,将真空腔箱体1内部抽真空。
52.步骤3:丝杆电机4正向旋转驱动升降支撑平台9下降至吸附盘8
‑
1底部微结构8
‑1‑
1与薄模7的上表面7
‑2‑
1接触,吸附盘8
‑
1与薄膜7产生范德华力(分子间作用力),升降支撑平台停止下降;
53.步骤4:直线推动器10驱动起模刀11运动到模板6与薄膜7的粘合界面6
‑
1处,并沿着粘合界面切入合适的深度。切入后,起模刀11停止运动并保持所在位置。在起模刀11运动靠近模板6并切入粘合界面6
‑
1过程中,起模刀的刀面11
‑
1与“模板与薄膜的粘合界面6
‑
1”始终保持共面。
54.步骤5:丝杆电机4反转驱动升降支撑平台9缓慢上升,向上的拉力使弹簧8
‑
2变形,通过吸附盘8
‑
1底部的微结构8
‑1‑
1作用在薄膜上。由于在真空环境中进行脱模,故只需克服模板6与薄膜7之间的粘附力。由于起模刀11切入点(a点)为整个模板6粘附力最小的部位,当拉力逐渐增大到大于a点粘附力时,a点薄膜7与模板6脱离,但此时拉力低于其他部位的粘附力,拉力还不足以将薄膜7的其它部位与模板6分离。随后粘附力最小部位传递到下一
‘
揭开线’(l1直线),升降支撑平台9继续缓慢上升,拉力继续增大到大于l1‘
揭开线’处的拉力,l1所在位置的薄膜7与模板6分离。
‘
揭开线’沿着ao方向连续传递,最终传递到a3点,a3点处的薄膜7与模板6分离,实现揭开式整体控制脱模。由于弹簧8
‑
2是挠性构件,脱模在真空环境中进行,只需克服模板6与薄膜7之间的很小的粘附力。脱模过程,薄膜整个平面不弯曲,绕着与粘连力最小部位(a点)相对的点(c点)为转动中心,薄膜整个平面旋转角度为极小的起模角(θ),实现脱模。
55.步骤6:脱模完成,取出模板和薄膜。
56.不难发现,本发明提出在真空环境下进行脱模,由于压印胶和模板间不存在空气,而外部为真空,因此从根本上消除了脱模过程中压差力。由于真空环境无法利用压差力将模板(和/或薄膜)吸附固定在真空吸盘上,本发明提出使用能够产生范德华力(分子间作用
力)的仿生吸附结构将模板(和/或薄膜)吸附在机械平台上,通过驱动机械平台发生相对位移产生拉力,拉力通过范德华力均匀作用到模板(和/或薄膜)上,实现连续揭开式整体控制脱模。由于拉力只需克服模板和压印胶之间的很小的粘附力,从而解决了压印图案(微结构)断裂受损导致模板和薄膜损坏问题。本发明实现对大尺寸晶圆的模板与薄膜之间的一次性保留完整微结构的脱模,具有方便快捷,脱模力小,脱模效率高,脱模图案完整性好等优点,适用于纳米压印领域各种尺寸大小晶圆模板与薄膜之间的脱模。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1