激光扫描装置的制作方法
[0001]
本申请实施例涉及光学器件领域,尤其涉及一种应用于激光雷达或激光投影领域的激光扫描装置。
背景技术:
[0002]
激光雷达是一种目标探测技术。激光雷达通过激光器发出激光光束,激光光束遇到目标物体后发生漫反射,通过探测器接收反射回的光束,并根据发射的光束和反射回的光束确定目标物体的距离、方位、高度、速度、姿态、形状等特征量。激光雷达被广泛应用于智能驾驶技术领域。
[0003]
根据激光雷达的工作原理,其主要由发射端(负责激光扫描)、接收端(负责接收反馈的激光信号)、驱动电路及信号处理电路三部分,这三个模块相对独立,有望通过芯片化实现单独集成,从而简化安装和并大幅降低成本。
[0004]
在目前激光雷达中,发射端部分仍然在采用分立器件进行搭建,例如,彼此独立的激光器,光学透镜,微机电系统(micro electro mechanic system,mems)微镜等;模块体积大,装配要求高,不利于低成本化。所以采用片上集成的发射端是未来构建低成本,差异化竞争力的一个重要方向。
技术实现要素:
[0005]
本申请提供一个片上集成的激光扫描装置,其发射端的器件集成在同一个芯片上,可以解决在现有的分立器件构成的发射端中,存在体积大,装配要求高,不利于降低成本等问题。
[0006]
第一方面,本申请实施例提供一个激光扫描装置,该扫描装置包括:扫描微镜芯片,封装壳以及封装器件;所述扫描微镜芯片包括扫描微镜和激光器;所述封装壳位于所述扫描微镜芯片上,与所述扫描微镜芯片共同构成中空结构,其中,所述激光器位于所述中空结构中;所述封装器件位于所述中空结构中,固定于所述封装壳上,用于将所述激光器发射的光束进行准直和反射,将输出的光发射至所述扫描微镜。
[0007]
本申请实施例通过固定在封装壳上的封装器件对激光器发出的光束进行准直和改变光路,可以保证激光器发出的光束到达集成在扫描微镜芯片上的扫描微镜,并实现精准定位,避免后续的人工调节;而且还能充分利用立体空间,节省芯片面积。
[0008]
结合第一方面,在第一方面的第一种可能的实施方式中,所述封装器件包括:光束整形装置和第一反射镜;所述光束整形装置,用于将所述激光器发射的光束进行准直,再发送给所述第一反射镜;所述第一反射镜,用于将准直后的光反射至所述扫描微镜。
[0009]
结合第一方面,在第一方面的第二种可能的实施方式中,所述封装器件包括:光束整形装置和第一反射镜;所述第一反射镜,用于将所述激光器发射的光束反射至所述光束整形装置;所述光束整形装置,用于对接收的光进行准直,将准直后的光发送至所述扫描微镜。
[0010]
上述两个实施方式分别描述了激光器输出光束先准直再反射,以及先反射再准直的情况,是本申请实施例中封装器件的两种可能结构。
[0011]
结合第一方面的第一种或第二种可能的实施方式,在第一方面的第三种可能的实施方式中,入射至所述第一反射镜的光束的传播方向与所述扫描微镜芯片存在夹角。本申请实施例将常规的平行于扫描微镜芯片的光路改变了方向,扫描微镜芯片的尺寸相比于常规情况的尺寸有所减小,可以降低成本和制作难度。
[0012]
结合第一方面的第三种可能的实施方式,在第一方面的第四种可能的实施方式中,入射至所述第一反射镜的光束的传播方向与所述扫描微镜芯片垂直。本申请实施例在上一个实施例的基础上,将常规的平行于扫描微镜芯片的光路改为垂直于扫描微镜芯片的光路,解决了激光器与扫描微镜之间间距太大导致芯片尺寸大、成本高的问题。
[0013]
结合第一方面的第四种可能的实施方式,在第一方面的第五种可能的实施方式中,所述封装器件还包括第二反射镜,用于将所述激光器发射的光束的传播方向改变为与所述扫描微镜芯片垂直,或将所述激光器发射的光束的传播方向改变为与所述扫描微镜芯片不平行,例如,光束传播方向与所述扫描微镜芯片的夹角为30度,45度,60度等等。
[0014]
结合第一方面的第五种可能的实施方式,在第一方面的第六种可能的实施方式中,所述第二反射镜,固定于所述封装壳上;或通过在所述扫描微镜芯片的表面刻蚀定位槽的方式固定在所述扫描微镜芯片上。
[0015]
结合第一方面或第一方面的第一种至第六种可能的实施方式中的任一种可能的实施方式,在第一方面的第七种可能的实施方式中,所述封装器件还包括半反半透镜和探测光透镜,所述扫描微镜芯片还包括探测器;所述半反半透镜,用于反射回波光束至所述探测光透镜,其中,所述回波光束为所述激光器发出的光束到达目标物体后,反射回来的光束;所述探测光透镜,用于对所述回波光束进行聚焦,将聚焦后的光束发给所述探测器;所述探测器,用于探测所述聚焦后的光束。本申请实施例提供的激光扫描装置集成了探测器,在实现激光扫描功能的基础上,还可以实现回波光束探测功能,实现收发一体。
[0016]
结合第一方面的第七种可能的实施方式,在第一方面的第八种可能的实施方式中,所述探测器位于所述中空结构中。
[0017]
结合第一方面的第七种可能的实施方式,在第一方面的第九种可能的实施方式中,所述半反半透镜位于所述回波光束的传播路径上。
[0018]
结合第一方面的第七种至第九种可能的实施方式中的任一种可能的实施方式,在第一方面的第十种可能的实施方式中,所述封装器件还包括第三反射镜;所述第三反射镜用于将所述半反半透镜发来的所述回波光束反射给所述探测光透镜;或所述第三反射镜用于将所述探测光透镜聚焦后的光束反射给所述探测器。通过引入第三反射镜,可以折叠回波光束的传播路径,起到减小本实施例中具有探测功能的激光扫描装置的尺寸。
[0019]
结合第一方面的第七种至第十种可能的实施方式中的任一种可能的实施方式,在第一方面的第十一种可能的实施方式中,所述扫描装置还包括处理器;所述处理器,用于根据所述探测器发来的探测信号,得到所述目标物体的位置及运动信息。本申请实施例提供了一种激光雷达,可以向周围环境发射激光束,并接收激光束被周围环境中的各对象反射回的回波光束,通过计算激光束的发射时间点和回波光束的返回时间点之间的时间延迟,来确定各对象的位置信息,未来可广泛应用于智能驾驶领域。
[0020]
结合第一方面或第一方面的第一种至第十一种可能的实施方式中的任一种可能的实施方式,在第一方面的第十二种可能的实施方式中,所述光束整形装置包括准直透镜,用于对接收的光束进行准直。其中,准直透镜可以为一个透镜,也可以为多个透镜组成的透镜组;例如,准直透镜可以包括快轴准直透镜和慢轴准直透镜,分别对光束沿快轴和慢轴进行准直。
[0021]
结合第一方面的第十二种可能的实施方式,在第一方面的第十三种可能的实施方式中,所述光束整形装置还包括扩束棱镜,用于对接收的光束进行扩束,扩束方向平行于所述扫描微镜的转轴。此外,所述扩束棱镜与所述准直透镜的顺序并不限定,激光器发出的光束可以先准直再扩束,也可以先扩束再准直。
[0022]
结合第一方面或第一方面的第一种至第十三种可能的实施方式中的任一种可能的实施方式,在第一方面的第十四种可能的实施方式中,所述封装壳还包括光窗,所述扫描微镜位于所述中空结构中,所述扫描微镜的输出光通过所述光窗射出。
[0023]
结合第一方面或第一方面的第一种至第十三种可能的实施方式中的任一种可能的实施方式,在第一方面的第十五种可能的实施方式中,所述封装壳还包括光窗,所述封装器件输出的光束通过所述光窗到达所述扫描微镜。
[0024]
上述两个实施例中,通过光窗,可以实现封装壳内外光束的透传。而且,光窗可以实现准直或者扩束的功能,可以节省一个镜片,进一步降低尺寸和成本。
[0025]
结合第一方面或第一方面的第一种至第六种可能的实施方式中的任一种可能的实施方式,在第一方面的第十六种可能的实施方式中,第一封装模块为多个,其中,所述第一封装模块包括所述封装壳、所述封装器件以及所述激光器。此外,第一封装模块还可以包括如第一方面第七种至第十种可能的实施方式中任一种公开的所有器件,集成探测功能。
[0026]
结合第一方面或第一方面的第一种至第六种可能的实施方式中的任一种可能的实施方式,在第一方面的第十七种可能的实施方式中,所述中空结构中,第二封装模块为多个,所述第二封装模块包括所述封装器件和所述激光器。与上一个实施例类似,第二封装模块还可以包括如第一方面第七种至第十种可能的实施方式中任一种公开的所有器件,集成探测功能。
[0027]
结合第一方面或第一方面的第一种至第十七种可能的实施方式中的任一种可能的实施方式,在第一方面的第十八种可能的实施方式中,所述扫描微镜芯片还包括芯片层和散热区,所述扫描微镜和激光器集成在所述芯片层的不同位置;所述散热区,位于所述激光器和所述芯片层之间,用于对激光器进行散热。本申请实施例可以提高激光器散热,可以有助于提高激光器的稳定性和寿命。
[0028]
结合第一方面的第十一种可能的实施方式,在第一方面的第十九种可能的实施方式中,所述扫描微镜芯片还包括驱动电极,其中,所述驱动电极分别与所述激光器和所述扫描微镜相连;所述处理器,用于通过所述驱动电极控制所述激光器发射激光以及所述扫描微镜旋转。
[0029]
结合第一方面或第一方面的第一种至第十九种可能的实施方式中的任一种可能的实施方式,在第一方面的第二十种可能的实施方式中,所述激光器通过贴片、键合或金属焊接方式集成于所述扫描微镜芯片。
[0030]
结合第一方面或第一方面的第一种至第二十种可能的实施方式中的任一种可能
的实施方式,在第一方面的第二十一种可能的实施方式中,所述封装壳通过金属焊环或聚合物环与所述扫描微镜芯片相连;或所述扫描微镜芯片上包括刻蚀的定位槽,所述封装壳安装在所述定位槽上。
[0031]
上述两个实施例提供了激光器及封装壳的连接方式,可以实现扫描装置的封装。
[0032]
第二方面,本申请实施例提供一种激光雷达,包括如第一方面的第七种至第十种可能的实施方式中的任一种公开的激光扫描装置,以及处理器;所述处理器,与所述探测器相连,用于根据所述探测器发来的探测信号,得到目标物体的位置及运动信息。
[0033]
结合第二方面,在第二方面的第一种可能的实现方式中,所述处理器还与激光器及扫描微镜相连,用于控制所述激光器发出激光,以及控制所述扫描微镜旋转。本申请实施例中,处理器可以为专用集成电路(application specific integrated circuit,asic),现场可编程逻辑门阵列(field programmable gate array,fpga)以及数字信号处理器(digital signal processor,dsp)等器件,同时实现处理探测信号以及控制激光器和扫描微镜的功能。
[0034]
结合第二方面,在第二方面的第二种可能的实现方式中,所述激光雷达还包括控制器,所述控制器与激光器及扫描微镜相连,用于控制所述激光器发出激光,以及控制所述扫描微镜旋转。本申请实施例中,控制器和处理器可以为两个不同的器件,均可以为asic、fpga、dsp中的任意一种。
[0035]
在本申请提供的激光扫描装置中,激光器与扫描微镜集成在同一个扫描微镜芯片中,实现了高精度的光学集成、封装集成和驱动互连集成,降低了芯片成本和调校难度;还可以通过垂直光路与垂直集成的整形封装模块,把常规的平行于芯片的光路改为垂直于芯片的光路,解决了激光器与扫描微镜之间间距太大导致芯片尺寸大、成本高的问题;而且,激光器与扫描微镜不需要再单独封装、控制,可以降低封装成本与外部控制电路难度;此外,整形封装模块可以通过扫描微镜上的基座焊环、聚合物以及定位槽等帮助实现精准定位,避免后期调节光学器件的人力成本,可以实现大规模量产。
附图说明
[0036]
图1为激光雷达扫描周围环境的示意图;
[0037]
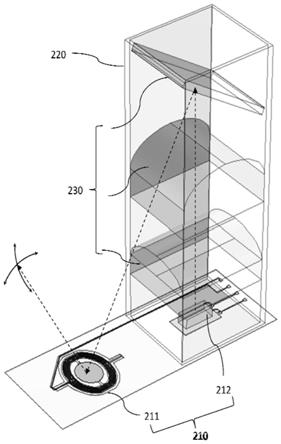
图2为本申请实施例提供的一种激光扫描装置的结构图;
[0038]
图3为本申请实施例提供的一种扫描微镜芯片的结构图;
[0039]
图4为本申请另一实施例提供的一种激光扫描装置的结构图;
[0040]
图5为本申请另一实施例提供的一种激光扫描装置的结构图;
[0041]
图6为本申请另一实施例提供的一种激光扫描装置的结构图;
[0042]
图7为本申请另一实施例提供的一种激光扫描装置的结构图;
[0043]
图8为本申请另一实施例提供的一种集成探测功能的激光扫描装置结构图;
[0044]
图9(a)为本申请另一实施例提供的一种集成探测功能的激光扫描装置结构图;
[0045]
图9(b)为本申请另一实施例提供的一种集成探测功能的激光扫描装置结构图;
[0046]
图10为本申请另一实施例提供的一种集成探测功能的激光扫描装置结构图;
[0047]
图11(a)为本申请另一实施例提供的一种激光扫描装置的结构图;
[0048]
图11(b)为本申请另一实施例提供的一种激光扫描装置的结构图;
[0049]
图12为本申请另一实施例提供的一种激光扫描装置的结构图;
[0050]
图13(a)为本申请另一实施例提供的一种激光扫描装置的结构图;
[0051]
图13(b)为本申请另一实施例提供的一种激光扫描装置的结构图;
[0052]
图14为本申请实施例提供的一种封装壳的集成方式示意图。
具体实施方式
[0053]
激光雷达是一种目标探测技术,通过激光器发出激光光束,激光光束遇到目标物体后发生漫反射,通过探测器接收反射回的光束,并根据发射的光束和反射回的光束确定目标物体的距离、方位、高度、速度、姿态、形状等特征量。
[0054]
激光雷达的应用领域非常广泛。除了运用在军事领域之外,目前还被广泛应用于生活领域,包括但不限于:智能驾驶车辆、智能驾驶飞机、3d打印、虚拟现实(virtual reality,vr)、增强现实(augmented reality,ar)、服务机器人等领域。以智能驾驶车辆为例,在智能驾驶车辆中设置激光雷达,激光雷达可通过快速且重复地发射激光束来扫描周围环境,以获取反映周围环境中的一个或多个对象的形貌、位置和运动情况的点云数据。具体的,激光雷达向周围环境发射激光束,并接收激光束被周围环境中的各对象反射回的回波光束,通过计算激光束的发射时间点和回波光束的返回时间点之间的时间延迟,来确定各对象的位置信息。同时,激光雷达还可确定描述激光束的空间取向的角度信息,将各对象的位置信息和激光束的角度信息相结合,生成所扫描的周围环境的三维地图,示意图如图1所示。利用该三维地图可指导无人车的智能驾驶,因此,激光雷达也被称为“无人车之眼”。应理解,本申请实施例中的智能驾驶,可以是无人驾驶、自动驾驶,还可以是辅助驾驶等。
[0055]
本申请提供一种如图2所示的片上集成的激光扫描装置,可用于激光雷达以及激光投影领域,该激光扫描装置包括扫描微镜芯片210,封装壳220以及封装器件230;该扫描微镜芯片210包括扫描微镜211和激光器212,扫描微镜芯片210的具体结构如图3所示,扫描微镜211和激光器212集成在扫描微镜芯片210的不同位置;具体的,扫描微镜芯片210可以理解成包括芯片层213,激光器212和扫描微镜211可以都集成在芯片层213上。其中,扫描微镜可以为微机电系统(micro electro mechanic system,mems)微镜,采用静电、磁电、压电、热电扫描微镜均可。
[0056]
如图3所示,扫描微镜芯片210表面设置有激光器驱动电极与外部驱动电极215,激光器212可通过贴片、键合或金属焊接等方式集成在扫描微镜芯片210上,通过打线焊接、倒桩焊、穿过硅片通道(through silicon vias,tsv)等方式与激光器驱动电极连接,激光器驱动电极通过埋在扫描微镜芯片210内的引线与位于扫描微镜芯片210边缘的外部驱动电极215连接。扫描微镜芯片210还存在扫描微镜驱动电极,扫描微镜211也可通过打线焊接、倒桩焊、tsv等方式与扫描微镜驱动电极连接,扫描微镜驱动电极通过埋在扫描微镜芯片210内的引线与位于扫描微镜芯片210边缘的外部驱动电极215连接。
[0057]
进一步,激光扫描装置还包括处理器,处理器与外部驱动电极215相连,用于通过外部驱动电极215控制激光器212发射激光,以及控制扫描微镜211进行旋转。其中,处理器可以为集成在扫描微镜芯片210上的,还可以为是独立于微镜扫描芯片210的器件,通过信号线与微镜扫描芯片210相连;处理器可以为asic、fpga、dsp等,本申请不做限定。
[0058]
另外,扫描微镜芯片210表面还设置有激光器散热区214,该激光器散热区214位于
激光器212和芯片层213之间,起到增强激光器散热的作用,可以采用铜、铝等金属,也可以采用石墨烯等热导率高的材料,本申请对此不做限定。
[0059]
封装壳220位于扫描微镜芯片210上,与扫描微镜芯片210共同构成中空结构,其中,激光器212位于中空结构中,相当于激光器212被封装壳220覆盖,后续位于中空结构中的器件,均可以理解成被封装壳220覆盖;封装器件230也位于中空结构中,固定于封装壳220上,用于对激光器212发出的光进行准直和反射,将出射的光发送至扫描微镜211;其中,可以通过卡槽、结构件固定、粘贴等方式将封装器件固定于封装壳220上。如图2所示,也可以说,封装壳220位于扫描微镜芯片210上,覆盖激光器212;封装器件230固定于封装壳220内,用于对激光器212发出的光进行准直和反射,将出射的光发送至扫描微镜211。本申请实施例通过固定在封装壳220上的封装器件对激光器211发出的光束进行准直和改变光路,可以保证激光器212发出的光束到达集成在扫描微镜芯片210上的扫描微镜211,并实现精准定位,避免后续的人工调节;而且还能充分利用立体空间,节省芯片面积。
[0060]
具体的,封装器件可以先对激光器412发出的光束进行准直,然后再对准直后的光束进行反射,如图4所示;封装器件也可以先对激光器412发出的光束进行反射,然后再对反射光进行准直,如图5所示。具体的,封装器件包括光束整形装置431和第一反射镜432;在如图4所示的情况下,光束整形装置431用于将激光器412发射的光进行准直,再发送给第一反射镜432;第一反射镜432用于将准直后的光反射至扫描微镜411;在如图5所示的情况下,第一反射镜432用于将激光器412发射的光反射至光束整形装置431;光束整形装置431用于对接收的光进行准直,将准直后的光发送至扫描微镜411。其中,图中的编号421表示光窗,可以将封装壳420内的光束透射到封装壳420外,也可以将封装壳420外的光束透射到封装壳420内。
[0061]
具体地,光束整形装置431包括准直透镜,例如,准直透镜可以包括快轴准直透镜和慢轴准直透镜,分别将激光器412输出的光束的快轴和慢轴进行准直,可以认为准直后的光束为点光束,点光束以一定倾角入射至扫描微镜,此时,扫描微镜的工作模式可以为二维扫描,二维扫描微镜存在两个转轴,可以分别沿两个转轴旋转,实现面扫描功能;需要说明的是,两个转轴可以互相垂直;其中,光束可以先经过快轴准直透镜,再经过慢轴准直透镜,也可以反过来;而且两个准直透镜可以位于第一反射镜432的光路的同一侧,也可以位于不同侧,本申请不做限定。另外,对于工作模式为一维扫描的扫描微镜,光束整形装置431还包括扩束棱镜,光束可以先经过该扩束棱镜,再准直;也可以先准直,再对光束进行扩束。以图4所示情况,且光束在光束整形装置431中先经过快轴准直透镜,后经过慢轴准直透镜为例,扩束棱镜可以位于激光器412和快轴准直透镜之间,也可以位于快轴准直透镜和慢轴准直透镜之间,也可以位于慢轴准直透镜和第一反射镜432之间,还可以位于第一反射镜432和扫描微镜411之间;以图5所示情况,且先经过快轴准直透镜,后经过慢轴准直透镜为例,扩束棱镜可以位于激光器412和第一反射镜432之间,也可以位于第一反射镜432和快轴准直透镜之间,也可以位于快轴准直透镜和慢轴准直透镜之间,还可以位于慢轴准直透镜和扫描微镜411之间;综上所述,扩束棱镜位于激光器412发出的光束的传播路径上即可。
[0062]
扩束棱镜将激光器412发出的光束扩束成线光束,且扩束方向平行于扫描微镜转轴,线光束以一定倾角入射至扫描微镜411,一维扫描微镜沿转轴旋转,实现面扫描功能。此外,如果扩束棱镜扩束的方向为快轴方向,则快轴准直透镜也可以不采用;如果扩束棱镜扩
束的方向为慢轴方向,则慢轴准直透镜也可以不采用;进一步节省透镜的数量。应理解,光束整形装置还可以包括更多的聚焦透镜或者扩束镜等,本申请对此并不做限定。
[0063]
在本实施例中,由于第一反射镜432的存在,光束的传输路径可以被改变,通过折叠光路可以达到节省芯片体积的目的。此时,入射至第一反射镜432的光束的传播方向与扫描微镜芯片存在夹角,可以理解成入射至第一反射镜432的光束的传播方向与扫描微镜芯片的上表面不平行,例如,成30度,50度,70度的夹角等等,其中,如果光束经过多次折射或反射之后才入射至第一反射镜432,则入射至第一反射镜432的光束的传播方向指的是最后一次折射或反射之后,传输至第一反射镜432的那束光的传播方向;上表面可以指扫描微镜芯片集成激光器412的那个表面。
[0064]
可选地,入射至第一反射镜432的光束的传播方向与扫描微镜芯片垂直;其中,激光器412输出的光束可以直线传输至第一反射镜432,再通过光窗421反射至扫描微镜411,如4和图5所示,此时,可以采用垂直腔发射的激光器412,激光器412发射的光的传播方向与扫描微镜芯片垂直,无需改变光束的传播方向,即可到达第一反射镜432。此外,激光器412发出的光束也可以通过一个第二反射镜433改变光路,到达第一反射镜432,如图6所示,激光器412发出的光束与扫描微镜芯片平行,且第二反射镜433的反射面与扫描微镜芯片的上表面的夹角为45度,激光器412发射的光通过第二反射镜433被反射到第一反射镜432,第二反射镜433反射的光的传播方向与扫描微镜芯片垂直。第二反射镜433位于中空结构中;第二反射镜433可以固定在封装壳420上,也可以通过在扫描微镜芯片的表面刻蚀定位槽的方式固定在扫描微镜芯片上,固定的位置可以预先设计好,以实现上述功能,避免后续再进行人工调节。其中,图4-6中的编号431表示光束整形装置,编号415表示外部驱动电极。
[0065]
可选地,封装壳220可以覆盖扫描微镜211,如图7所示;也可以不覆盖,如图2所示。具体的,封装壳220还包括光窗,如果扫描微镜211位于该中空结构中(被封装壳220覆盖),扫描微镜211的输出光通过该光窗射出;如果扫描微镜211位于该中空结构之外(不被封装壳220覆盖),封装器件230输出的光束通过该光窗到达扫描微镜211。其中,光窗除了可以将封装壳220内的光束透射到封装壳220外,也可以起到准直或扩束的功能,也就是说,光束整形装置可以节省一个透镜;例如,在扫描微镜211的工作模式为二维扫描的情况下,光束整形装置可以包括快轴准直透镜或慢轴准直透镜,用光窗来实现其中一个准直的功能;在扫描微镜的工作模式为一维扫描的情况下,还可以用光窗来实现扩束功能,此时不需要增加扩束棱镜;也可以采用光窗来实现准直功能,光束整形装置无需同时包括快轴准直透镜和慢轴准直透镜。
[0066]
本申请实施例中,激光器与扫描微镜集成在同一个扫描微镜芯片中,实现了高精度的光学集成、封装集成和驱动互连集成,降低了芯片成本和调校难度;可以通过垂直光路与垂直集成的封装壳和封装器件,把常规的平行于芯片的光路改为垂直芯片的光路,解决了激光器与扫描微镜之间间距太大导致芯片尺寸大、成本高的问题;而且,激光器与扫描微镜不需要再单独封装、控制,可以降低封装成本与外部控制电路难度。
[0067]
本申请另一实施例提供一种片上集成的激光扫描装置,可用于激光雷达以及激光投影领域,具体结构如图8所示,该激光扫描装置可以包括之前实施例中的所有器件以及不同器件之间的位置关系,例如,激光扫描装置包括扫描微镜芯片、封装壳和封装器件,其中,扫描微镜芯片包括扫描微镜和激光器,可以实现光束扫描功能。除此之外,在本申请实施例
中,该激光扫描装置还可以包括探测反馈光的功能,形成激光扫描收发装置;例如,封装器件除了包括光束整形装置831和第一反射镜832之外,还可以包括半反半透镜834和探测光透镜834,扫描微镜芯片还可以包括探测器816;
[0068]
半反半透镜834,用于反射回波光束至探测光透镜835,其中,回波光束为激光器812发出的光束到达目标物体后,反射回来的光束;由于光路是可逆的,回波光束会沿着与激光器812发出的光束相同的传播路径反射回来;因此,半反半透镜834可以位于激光器812发射光束的传播路径上,由于半反半透镜834具有透射部分光、反射另一部分光的功能,可以透射发射光束的一部分用于实现扫描功能,反射回波光束的一部分用于探测;应理解,半反半透镜834为封装器件包括的一种器件,同样位于中空结构中,固定于封装壳上,只要位于回波光束的传播路径上即可,具体位置可以不做限定。
[0069]
探测光透镜835,用于对该回波光束进行聚焦,将聚焦后的光束发给探测器816;探测光透镜835也可以包括多个透镜,构成透镜组,对回波光束进行聚焦,具体的透镜数目不做限定。探测器816,用于探测聚焦后的光束。其中,探测器816的集成方案与激光器812的集成方案相同,也可通过贴片、键合或金属焊接等方式集成在扫描微镜芯片上,通过埋在扫描微镜芯片内的引线与位于扫描微镜芯片边缘的外部驱动电极815连接。探测器816可以为光电探测器。
[0070]
可选地,本实施例公开的封装器件还包括第三反射镜836,第三反射镜836可以位于半反半透镜834和探测光透镜835之间,如图9(a)所示,用于改变半反半透镜834发来的回波光束的传播方向,将反射后的回波光束发送至探测光透镜835;也可以位于探测光透镜835和探测器816之间,如图9(b)所示,用于改变探测光透镜835发来的回波光束的传播方向,将反射后的回波光束发送至探测器816。此外,扫描装置还可以包括隔离板837,位于激光器和探测器之间,用一个降低发射光束与回波光束之间的串扰,具体结构如图10所示。
[0071]
进一步,激光扫描装置还包括处理器,处理器与探测器816相连,用于根据探测器816发来的探测信号,得到目标物体的位置及运动信息。其中,该处理器与之前实施例提到的用于控制激光器和扫描微镜的处理器为同一个,本申请不再赘述。此外,本实施例的处理器也可以和之前的处理器是两个独立的处理器,分别实现各自的功能。
[0072]
本申请实施例提供的激光扫描装置集成了探测器,在实现激光扫描功能的基础上,还可以实现回波光束探测功能;而且,通过引入第三反射镜836,还可以折叠回波光束的传播路径,起到减小本实施例中具有探测功能的激光扫描装置的尺寸。
[0073]
可选地,封装壳820与扫描微镜芯片共同构成的中空结构可以覆盖激光器812、封装器件、探测器816及扫描微镜811,对扫描微镜也起到保护作用;也可以只覆盖激光器812、封装器件和探测器816。具体的,封装壳820还包括光窗,如果扫描微镜811位于该中空结构中,扫描微镜811的输出光通过该光窗射出,回波光束通过该光窗入射到扫描微镜811;如果扫描微镜811位于该中空结构之外,封装器件输出的光束通过该光窗到达扫描微镜811,扫描微镜811将回波光束通过光窗发送至封装壳820内。
[0074]
在上述实施例的基础上,还可以在扫描微镜芯片上集成多个第一封装模块,第一封装模块包括封装壳,封装器件和激光器,激光器与封装器件一一对应,其中,封装器件可以包括上述多个实施例中公开的器件,本实施例不再赘述。可选地,第一封装模块还包括探测器。另外,第一封装模块还可以包括封装器件和封装壳,不包括激光器,此时激光器可以
为多通道激光器,每路通道对应一套封装器件,为对应的封装器件提供光束。需要说明的是,在本实施例中,第一封装模块包括的封装壳与扫描微镜芯片构成的中空结构中不存在扫描微镜。
[0075]
集成的多个第一封装模块1101位于扫描微镜1102的同一侧。在扫描微镜1102为一维扫描微镜的情况下,如图11(a)所示,第一封装模块1101中的封装器件将激光器发出的光束扩束成线光束,且扩束方向平行于扫描微镜1102的转轴,每个第一封装模块1101将输出一条线光束,入射至一维扫描微镜,该一维扫描微镜沿转轴旋转,实现面扫描功能。由于每条线光束具有一定的长度,本实施例中多条线光束一起扫描,从而扩大扫描范围,实现更大的扫描角度。可选地,多条线光束以相同的入射角入射至一维扫描微镜,在一维扫描微镜处拼接在一起,形成一条更长的线光束,该一维扫描微镜沿转轴旋转,实现面扫描功能,此时每条线光束的扫描结果可以更好地拼接在一起,降低相邻线光束的扫描范围再拼接时的质量损耗。
[0076]
此外,多个第一封装模块1101可以为相同的封装模块,也可以彼此不同,甚至还可以部分相同,部分不同;例如,如之前的实施例所述,封装器件包括的光束整形装置有多种不同的结构,且光束整形装置与封装器件中包括的第一反射镜之间也存在不同的位置关系,因此,第一封装模块1101的内部结构很有可能不同,本实施例中对此不做限定。每个第一封装模块1101都可以具有彼此相同的内部结构,即封装器件和激光器的结构及位置关系均相同;也可以具有不同的内部结构,只要满足出射的线光束入射至一维扫描微镜即可;可选地,多个第一封装模块1101出射的光束以相同的入射角入射至一维扫描微镜。
[0077]
在扫描微镜1102为二维扫描微镜的情况下,如图11(b)所示,第一封装模块1101中的封装器件将激光器发出的光束准直为点光束,准直的点光束入射至二维扫描微镜,二维扫描微镜存在两个转轴,可以分别沿两个转轴旋转,实现面扫描功能。由于每个点光束经二维扫描微镜扫描后可以实现一个区域的扫描,多个点光束一起,与单个点光束的情况相比,在二维扫描微镜保持相同扫描角度的情况下,可以实现更大的扫描范围。可选地,多个点光束以相同的入射角入射至二维扫描微镜;进一步地,多个点光束可以入射至二维扫描微镜的其中一个转轴所在位置上。在扫描微镜1102为二维扫描微镜的情况下,多个第一封装模块1101可以具有彼此相同的内部结构,也可以彼此不同,还可以其中几个内部结构相同,另外几个不同。应理解,多个第一封装模块1101的高度可以相同,也可以不同。
[0078]
在上述实施例中,无论扫描微镜1102为一维扫描微镜,还是二维扫描微镜,多个第一封装模块1101均排列在扫描微镜1102的同一侧。其中,多个第一封装模块1101可以沿扫描微镜芯片的边缘平行排列,也可以以扫描微镜1102的中点为圆心呈半圆形排列。
[0079]
可选地,多个第一封装模块1101与扫描微镜1102排成一排,如图11所示,此时多个第一封装模块1101位于扫描微镜1102的同一侧,且高度各不相同,越靠近扫描微镜1102的第一封装模块1101高度越低,保证靠近扫描微镜1102的第一封装模块1101不会阻挡后面的第一封装模块1101的输出光束,每个第一封装模块1101的输出光束入射至扫描微镜1102的入射角度不同。应理解,图12是以点光束为例,线光束同样也可以;此外,还存在其他的第一封装模块1101的排列方式,均在本实施例的保护范围内。可选地,在第一封装模块1101的输出光束是点光束的情况下,多个点光束入射至扫描微镜1102的同一位置;在第一封装模块1101的输出光束是线光束的情况下,多个线光束入射至扫描微镜1102的同一位置。
[0080]
进一步地,在上述实施例的基础上,还可以用一个封装壳1301封装多个第二封装模块,即在中空结构中存在多个第二封装模块,可以如图13(a)和13(b)所示,第二封装模块包括封装器件以及激光器,激光器与封装器件一一对应,其中,封装器件可以包括上述实施例中公开的器件,本实施例不再赘述。可选地,第一封装模块还包括探测器。另外,第二封装模块还可以包括封装器件,不包括激光器,此时激光器可以为多通道激光器,每路通道对应一套封装器件,为对应的封装器件提供光束。
[0081]
需要说明的是,图13(a)和图13(b)只是分别给出一种具体的实施例,还可以有其他结构不同的实施例。例如,第二封装模块在封装壳1301内的排列方式与第一封装模块的排列方式类似,多个第二封装模块可以排成一排,也可以彼此交错,存在多种可能的排列方式;多个第二封装模块可以具有彼此相同的结构,也可以彼此不同,还可以其中几个结构相同,另外几个不同;而且,封装壳1301的光窗可以为一个,所有第二封装模块的输出光束均从该光窗射出;也可以具有与第二封装模块一一对应的光窗,每个第二封装模块的输出光束从对应的光窗射出;光窗的数量也可以大于1且小于第二封装模块的数量。
[0082]
在本实施例中,封装壳1301与扫描微镜芯片构成的中空结构中,可以存在扫描微镜1302,此时扫描微镜1302输出的光经封装壳1301的光窗出射;也可以不存在扫描微镜1302,此时多个第二封装模块输出的光束通过封装壳1301的光窗到达扫描微镜1302。本申请实施例中,多个第二封装模块共用同一个封装壳1301,整个模块与芯片只进行一次集成,降低多次集成可能造成的误差。
[0083]
在描述第一封装模块和第二封装模块这两个实施例中,扫描微镜芯片表面也设置有激光器驱动电极与外部驱动电极,多个激光器均可通过贴片、键合或金属焊接等方式集成在扫描微镜芯片上,并通过打线焊接、倒桩焊、tsv等方式与激光器驱动电极连接,激光器驱动电极通过埋在扫描微镜芯片内的引线与位于扫描微镜芯片边缘的外部驱动电极连接。另外,扫描微镜芯片表面可以设置有多个激光器散热区,每个激光器散热区对应于一个激光器,起到增强激光器散热的作用,可以采用铜、铝等金属,也可以采用石墨烯等热导率高的材料。
[0084]
可选地,该激光扫描装置还可以包括保护壳,用于将整个扫描微镜芯片、封装壳以及封装器件都覆盖起来,减轻外界环境对芯片及封装器件的影响。
[0085]
此外,封装器件固定于封装壳上,两者构成一个整体(在此称为整形封装模块)集成在扫描微镜芯片上,参照图14,集成方式有以下几种:
[0086]
(1)金属焊接,在扫描微镜芯片上与整形封装模块对应的位置布置一圈金属作为基座焊环,该基座焊环可以选择铜、锡合金(cusn),金、锡合金(ausn)等;整形封装模块的底部材料为金属(即整形封装模块要与扫描微镜芯片接触的那部分),可以采用铜、金、锡等;利用金属焊接工艺(例如,倒装焊等)将整形封装模块与扫描微镜芯片集成在一起。
[0087]
(2)聚合物粘合,在扫描微镜芯片上与整形封装模块对应的位置生长一圈聚合物作为粘合材料,整形封装模块压在聚合物上,加热融化聚合物使整形封装模块与扫描微镜芯片集成在一起;其中,聚合物可以为su-8光刻胶或苯并环丁烯(bcb)等。
[0088]
(3)胶水粘合,在扫描微镜芯片上与整形封装模块对应的位置刻蚀一圈定位槽,整形封装模块安装在定位槽内,通过胶水等粘合剂进行粘合,将整形封装模块与扫描微镜芯片集成在一起。
[0089]
应理解,封装壳以及保护壳与扫描微镜芯片的集成,均可以采用上述方式中的任意一种。
[0090]
在本申请提供的激光扫描装置中,激光器与扫描微镜集成在同一个扫描微镜芯片中,实现了高精度的光学集成、封装集成和驱动互连集成,降低了芯片成本和调校难度;可以通过垂直光路与垂直集成的整形封装模块,把常规的平行于芯片的光路改为垂直芯片的光路,解决了激光器与扫描微镜之间间距太大导致芯片尺寸大、成本高的问题;而且,激光器与扫描微镜不需要再单独封装、控制,可以降低封装成本与外部控制电路难度;此外,整形封装模块可以通过扫描微镜上的基座焊环、聚合物以及定位槽等帮助实现精准定位,避免后期调节光学器件的人力成本,可以实现大规模量产。
[0091]
本申请另一实施例提供一种激光雷达,包括上述所有实施例中提供的激光扫描装置,以及处理器,其中,处理器与探测器相连,用于根据探测信号得到反映周围环境中的一个或多个对象的形貌、位置和运动情况的信息,可以为asic、fpga、dsp中的任意一种。此外,该处理器还可以与激光器及扫描微镜相连,用于控制所述激光器发出激光,以及控制所述扫描微镜旋转。应理解,也可以采用两个单独的器件,一个用来处理探测信号,另一个用来实现控制功能,本申请不做限定。
[0092]
尽管结合具体特征及其实施例对本申请进行了描述,显而易见的,在不脱离本申请的精神和范围的情况下,可对其进行各种修改和组合。相应地,本说明书和附图仅仅是所附权利要求所界定的方案进行示例性说明,且视为已覆盖本申请范围内的任意和所有修改、变化、组合或等同物。
[0093]
显然,本领域的技术人员可以对本申请进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本申请实施例的这些修改和变型属于本申请权利要求及其等同技术的范围之内,则本申请也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1