微机械构件和用于微机械构件的制造方法与流程
1.本发明涉及一种微机械构件。本发明同样涉及一种用于微机械构件的制造方法。
背景技术:
2.在jp 2009
‑
223165 a中描述一种可调整的微镜,该微镜应该能够借助于两个具有部分区段的曲折形弹簧关于可调整微镜的支架调整,所述部分区段分别通过至少一个压电材料覆盖。尤其地,通过将至少一个电压施加到所述至少一个压电材料上应该能够交替地形成作用到两个曲折形弹簧的部分区段上的弯曲应力或拉应力,使得可调整微镜借助于两个曲折形弹簧的引起的镜面对称的变形关于其支架进行调整。
技术实现要素:
3.本发明实现一种具有权利要求1的特征的微机械构件和一种具有权利要求9的特征的用于微机械构件的制造方法。
4.本发明实现一种微机械构件,具有相应的可调整部件,该可调整部件可以有针对性地围绕借助于两个扭转弹簧的构造而固定的旋转轴调整,其中,可调整部件的另外的不期望的调整运动的出现、即所谓的干扰模式的出现借助于这两个扭转弹簧减少/防止。因此,在这种微机械构件运行时,干扰模式的激励的频率相对于现有技术明显减小。
5.如下面更详细阐释的那样,两个扭转弹簧尤其抵抗可调整部件从两个扭转弹簧的平面中“提升出来”或可调整部件垂直于旋转轴的干扰模式。由此,本发明实现具有相对于现有技术改善运行的微机械构件。附加地,本发明在微机械构件的相对较小的制造费用的情况下确保微机械构件的这些优点。
6.在有利的实施方式中,微机械构件包括至少一个传感器装置,所述传感器装置设计成用于发出或提供相应于可调整部件从其静止位置关于支架的偏移的至少一个传感器信号,其中,传感器装置通过至少一个构造在第一扭转弹簧和/或第二扭转弹簧上和/或中的信号导线与构造在支架上的分析处理电子部件或构造在支架上的分析处理电子部件
‑
应用触点连接。因此,对于传感器装置的电接触可以取消根据现有技术的构造在所述至少两个曲折形弹簧上和/或中的信号导线。因此,传感器装置的电接触与对于所述至少两个曲折形弹簧的期望的好的可弯曲性的副作用无关。
7.优选地,第一致动器装置和第二致动器装置分别包括多个由至少一个压电材料组成的压电致动器层和至少一个电导线,所述压电致动器层构造在相对应的曲折形弹簧的多个部分区段上和/或中,所述电导线构造在相对应的曲折形弹簧上和/或中,从而使至少一个电压信号这样施加到第一曲折形弹簧或第二曲折形弹簧的压电致动器层上,使得可以引起第一曲折形弹簧和第二曲折形弹簧的周期性的和镜面对称的变形。以该方式,可以使第一曲折形弹簧和第二曲折形弹簧的构造有压电致动器层的部分区段这样弯曲,使得可调整部件以相对较大的调整角度从其静止位置关于支架围绕旋转轴调整。
8.在微机械构件的有利的实施方式中,第一曲折形弹簧的各两个相邻的构造有压电
致动器层的部分区段通过各一个第一曲折形弹簧的中间区段相互连接,并且第二曲折形弹簧的各两个相邻的构造有压电致动器层的部分区段通过各一个第二曲折形弹簧的中间区段相互连接,其中,第一曲折形弹簧的中间区段的至少一个中间区段通过各一个接片元件与第二曲折形弹簧的对此关于第一对称平面镜面对称的中间区段连接。在这种情况下,微机械构件的所述至少一个接片元件有助于干扰模式的附加抑制。
9.替代地或补充地,第一曲折形弹簧的构造有压电致动器层的部分区段和第二曲折形弹簧的构造有压电致动器层的部分区段彼此平行地并且垂直于旋转轴地定向。在该情况下,部分区段这样凹形和凸形地变形,使得相邻于凹形变形的部分区段存在至少一个凸形变形的部分区段并且相邻于凸形变形的部分区段存在至少一个凹形变形的部分区段,所述凹形和凸形的变形引起可调整部件围绕旋转轴的旋转。
10.作为有利的扩展方案,第一曲折形弹簧的至少两个相邻的构造有压电致动器层的部分区段和第二曲折形弹簧的至少两个相邻的构造有压电致动器层的部分区段通过各一个中间弹簧元件相互连接。在该情况下,所述至少两个中间弹簧元件也有助于在微机械构件运行时抑制干扰模式。
11.作为另外的有利的扩展方案,微机械构件还可以附加地包括第三曲折形弹簧和与第三曲折形弹簧关于第一对称平面镜面对称地构造的第四曲折形弹簧,所述曲折形弹簧在相应的曲折形弹簧的各一个外端部处直接地或间接地接合在支架上并且在相应的曲折形弹簧的各一个内端部处直接地或间接地接合在可调整部件上。优选地,在第三曲折形弹簧上和/或中构造有第三致动器装置并且在第四曲折形弹簧上和/或中构造有第四致动器装置,使得借助于第三致动器装置和第四致动器装置可以激励出第三曲折形弹簧和第四曲折形弹簧的周期性的并且关于第一对称平面镜面对称的变形,所述变形与第一曲折形弹簧和第二曲折形弹簧的周期性的和镜面对称的变形是反相的。通过在微机械构件的该实施方式中存在的四个曲折形弹簧可以将相对较高的调整力无问题地施加到可调整部件上。
12.以优选的方式,第三曲折形弹簧和第四曲折形弹簧与第一曲折形弹簧和第二曲折形弹簧关于垂直于第一对称平面定向的第二对称平面镜面对称,其中,旋转轴位于第二对称平面内部。四个曲折形弹簧的这种对称构造有利地抵抗干扰模式的出现。
13.在实施用于这种微机械构件的相应的制造方法时也确保前面描述的优点。明确指出,制造方法可以这样扩展,使得由此可以制造所有上面阐释的微机械构件。
附图说明
14.下面参照附图阐释本发明的另外的特征和优点。附图示出:
15.图1微机械构件的第一实施方式的示意性整体示图;
16.图2微机械构件的第二实施方式的示意性整体示图;
17.图3a和3b微机械构件的第三实施方式的整体和部分示图;
18.图4微机械构件的第四实施方式的示意性部分示图;
19.图5a至5d微机械构件的第五实施方式的整体和部分示图;和
20.图6用于阐释制造方法的实施方式的流程图。
具体实施方式
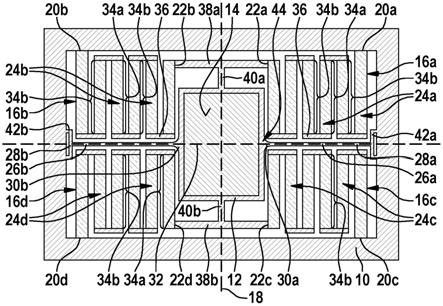
21.图1示出微机械构件的第一实施方式的示意性整体示图。
22.在图1中示意性示出的微机械构件包括支架10和关于支架10可调整的部件12。示例性地,可调整部件12构造为具有反射表面14的微镜12。然而微机械构件的可构造性不限制于所述微机械构件配备有作为可调整部件12的微镜12。支架10的框架形状也仅示例性地呈现。
23.图1的微机械构件具有第一曲折形弹簧16a和关于第一对称平面18与第一曲折形弹簧16a镜面对称地构造的第二曲折形弹簧16b。作为可选的扩展方案,微机械构件还包括第三曲折形弹簧16c和关于第一对称平面18与第三曲折形弹簧16c镜面对称地构造的第四曲折形弹簧16d。曲折形弹簧16a至16d中的每个曲折形弹簧在相应的曲折形弹簧16a至16d的各一个外端部20a至20c处直接地或间接地接合在支架10上。此外,曲折形弹簧16a至16d中的每个曲折形弹簧在相应的曲折形弹簧16a至16d的各一个内端部22a至22d处直接地或间接地接合在可调整部件12上。由于它们的曲折形的形状,曲折形弹簧16a至16d可以相对较长地构造,而曲折形弹簧16a至16d的单个长度不导致微机械构件的明显变大。曲折形弹簧16a至16d的单个长度例如可以大于等于8mm(毫米)、尤其大于等于10mm(毫米)、特别是大于等于12mm(毫米)。
24.此外,至少在第一曲折形弹簧16a上和/或中这样构造有第一致动器装置24a并且在第二曲折形弹簧16b上和/或中这样构造有第二致动器装置24b,使得借助于第一致动器装置24a和第二致动器装置24b可以激励出/被激励出第一曲折形弹簧16a和第二曲折形弹簧16b的周期性的和关于第一对称平面18镜面对称的变形。至少借助于第一曲折形弹簧16a和第二曲折形弹簧16b的关于第一对称平面18镜面对称的变形,可调整部件12由此可以关于支架10调整。作为可选的扩展方案,图1的微机械构件还在第三曲折形弹簧16c上和/或中这样具有第三致动器装置24c并且在第四曲折形弹簧16d上和/或中这样具有第四致动器装置24d,使得借助于第三致动器装置24c和第四致动器装置24d可以激励出/被激励出第三曲折形弹簧16c和第四曲折形弹簧16d的周期性的和关于第一对称平面18镜面对称的变形。在此期望的是,第三曲折形弹簧16c和第四曲折形弹簧16d的周期性的和关于第一对称平面18镜面对称的变形与第一曲折形弹簧16a和第二曲折形弹簧16b的周期性的和镜面对称的变形是反相的。如下面更详细阐释的那样,在该情况下所有四个曲折形弹簧16a至16d的变形可以用于将相对较大的调整力传递到可调整部件12上。
25.在图1中示意性描绘的微机械构件也具有第一扭转弹簧26a和第二扭转弹簧26b,它们在相应的扭转弹簧26a或26b的各一个外端部28a或28b处直接地或间接地接合在支架10上并且在相应的扭转弹簧26a和26b的各一个内端部30a或30b处直接地或间接地接合在可调整部件12上。第一扭转弹簧26a和第二扭转弹簧26b分别沿着旋转轴32延伸。因此,可调整部件12可以至少借助于第一曲折形弹簧16a和第二曲折形弹簧16b的周期性的和镜面对称的变形(并且可能借助于第三曲折形弹簧16c和第四曲折形弹簧16d的与此反相的变形)关于支架10围绕旋转轴32调整。
26.第一扭转弹簧26a和第二扭转弹簧26b针对可调整部件12的不期望的调整运动“固定(sicherung)”希望的旋转轴32。因此,第一扭转弹簧26a和第二扭转弹簧26b有助于稳定可调整部件12围绕旋转轴32的期望的旋转运动。尤其地,第一扭转弹簧26a和第二扭转弹簧
26b提高微机械构件针对可调整部件12在垂直于扭转弹簧26a和26b的平面定向的方向上的不期望的调整运动的刚性。因此,可调整部件的另外的不期望的调整运动的出现/频率、即所谓的干扰模式的出现/频率借助于第一扭转弹簧26a和第二扭转弹簧26b减小/阻止。这确保微机械构件的可靠运行。
27.如果第三曲折形弹簧16c和第四曲折形弹簧16d构造在微机械构件上,那么第三曲折形弹簧16c和第四曲折形弹簧16d优选关于垂直于第一对称平面18定向的第二对称平面与第一曲折形弹簧16a和第二曲折形弹簧16b镜面对称,其中,旋转轴32位于(未画出的)第二对称平面内部。这种对称在微机械构件上的保持也有利地导致干扰模式的减少。
28.在图1的示例中,致动器装置24a至24d分别包括多个由至少一个压电材料组成的压电致动器层24a至24d。每个曲折形弹簧16a至16d可以具有由相同的压电材料或由不同的压电材料组成的压电致动器层24a至24d。所述至少一个压电材料例如可以是pzt双金属(blei
‑
zirkonium
‑
titanat,锆钛酸铅)。压电致动器层24a至24d例如可以具有在1μm(微米)至2μm(微米)之间的层厚度。
29.各个压电致动器层24a至24d构造在相对应的曲折形弹簧16a至16d的多个部分区段34a和34b上和/或中。优选地,各个曲折形弹簧16a至16d的各两个相邻的、构造有压电致动器层24a至24d的部分区段34a和34b通过相应的曲折形弹簧16a至16d的各一个中间区段36相互连接,其中,中间区段36理解为“没有所述至少一个压电材料的弹簧区段”。同样有利地,曲折形弹簧16a至16d的构造有压电致动器层24a至24d的部分区段34a和34b彼此平行地并且垂直于旋转轴32地延伸。
30.为了与压电致动器层24a至24d共同作用,致动器装置24a至24d也分别具有至少一个(未示出的)电导线,该电导线构造在相对应的曲折形弹簧16a至16d上和/或中。由此可以将至少一个电压信号这样施加到压电致动器层24a至24d上,使得至少可以引起/已引起第一曲折形弹簧16a和第二曲折形弹簧16b的周期性的和镜面对称的变形(并且优选也引起第三曲折形弹簧16c和第四曲折形弹簧16d的与此反相的变形)。致动器装置24a至24d作为压电致动器装置24a至24d的这种构造的特征在于高调整力,但均实现小的调整路径。优选地,借助于这里描述的压电致动器装置24a至24d不谐振地进行可调整部件12围绕旋转轴32的调整。
31.如果不将电压施加到压电致动器层24a至24d上,那么可调整部件12位于其关于支架10的所谓的静止位置中。通过将所述至少一个电压信号施加到压电致动器层24a至24d上,能够可选地将拉应力或弯曲应力施加到相应的部分区段34a和34b上。优选地,对于曲折形弹簧16a至16d中的每个曲折形弹簧可以分别限定多个第一部分区段34a和多个第二部分区段34,其中,分别在相同的曲折形弹簧16a至16d的两个第一部分区段34a之间存在相应的曲折形弹簧16a至16d的一个第二部分区段34b并且在相同的曲折形弹簧16a至16d的两个第二部分区段34b之间存在相应的曲折形弹簧16a至16d的一个第一部分区段34a。在这种情况下,所述至少一个电压信号到压电致动器层24a至24d上的施加这样进行,使得交替地将拉应力施加到曲折形弹簧16a至16d的所有第一部分区段34a上并且将弯曲应力施加到曲折形弹簧16a至16d的所有第二部分区段34b上,或者将弯曲应力施加到曲折形弹簧16a至16d的所有第一部分区段34a上并且将拉应力施加到曲折形弹簧16a至16d的所有第二部分区段34b上。在曲折形弹簧16a至16d的所有第一部分区段34a凹形弯曲时,曲折形弹簧16a至16d
的第二部分区段34b同时凸形弯曲,而在曲折形弹簧16a至16d的所有第一部分区段34a凸形弯曲时,曲折形弹簧16a至16d的第二部分区段34b同时凹形弯曲。曲折形弹簧16a至16d的这种“交替的凸形和凹形弯曲”引起可调整部件12从其静止位置出发关于支架10以相对较大的调整角度围绕旋转轴32的相对较强的调整。借助于曲折形弹簧16a至16d的“交替的凸形和凹形弯曲”引起的可调整部件12围绕旋转轴32的调整角度例如可以大于等于4
°
(度)。
32.在图1的示例中,第一曲折形弹簧16a和第二曲折形弹簧16d的内端部22a和22b接合在位于旋转轴32的第一侧上并且平行于旋转轴32走向的第一固定接片38a上。相应地,第三曲折形弹簧16c和第四曲折形弹簧16d的内端部22c和22d也接合在平行于旋转轴32走向的第二固定接片38b上,该第二固定接片位于旋转轴32的第二侧上。可调整部件12通过各一个垂直于旋转轴32延伸的连接元件40a和40b接合在固定接片38a和38b上。第一曲折形弹簧16a和第二曲折形弹簧16b的周期性的和镜面对称的变形(以及可能的第三曲折形弹簧16c和第四曲折形弹簧16d的与此反相的变形)引起固定接片38a和38b垂直于旋转轴32的反相运动,并且由此引起可调整部件12围绕旋转轴32的“摆动”。
33.如在图1中可看出,第一扭转弹簧26a和第二扭转弹簧26b还可以与另外的弹簧类型“集成”。例如,扭转弹簧26a和26b的外端部28a和28b分别还接合在u弹簧42a和42b上,其中,各个u弹簧42a和42b朝着支架10“叉出”。扭转弹簧26a和26b与另外的弹簧类型的这种“集成”可以改善可调整部件12围绕旋转轴32关于支架10的可调整性,其中,扭转弹簧26a和26b仍有利地抵抗不期望的干扰模式。
34.作为有利的扩展方案,微机械构件还可以包括至少一个传感器装置44,该传感器装置设计成用于发出或提供相应于可调整部件12从其静止位置关于支架10的偏移的至少一个传感器信号。传感器装置44例如可以是压电式或压阻式传感器装置44。优选地,传感器装置44构造在第一扭转弹簧26a在可调整部件12处的“锚固区域”上和/或中,和/或,构造在第二扭转弹簧26b在可调整部件12处的“锚固区域”上和/或中。传感器装置44在第一扭转弹簧26a在可调整部件12处的“锚固区域”上和/或中的构造和/或在第二扭转弹簧26b在可调整部件12处的“锚固区域”上和/或中的构造能够实现可调整部件12从其静止位置围绕旋转轴32关于支架10的偏移的清楚探测/识别。尤其地,传感器装置44的这种构造比传感机构在曲折形弹簧16a至16d中的一个曲折形弹簧上的传统定位更有利,该传统定位经常不能实现与可调整部件12的偏移的可靠关联并且还导致以下缺点:微机械构件的干扰模式被错误地解释为可调整部件12从其静止位置围绕旋转轴32的期望偏移。
35.有利地,传感器装置44还通过至少一个构造在第一和/或第二扭转弹簧26a或26b上和/或中的(未画出的)信号导线与构造在支架10上的分析处理电子部件或构造在支架10上的分析处理电子部件
‑
接合触点连接。扭转弹簧26a和26b提供可调整部件12到支架10上的“附加接合部”,所述附加接合部可以用于连接传感器装置44的至少一个信号导线。因此,可以无问题地取消至少一个信号导线在至少两个曲折形弹簧16a至16d上和/或中的构造。因此,所述至少两个曲折形弹簧16a至16d的弯曲刚性不受到通过扭转弹簧26a和26b的至少一个扭转弹簧引导的至少一个信号导线损害。此外,信号导线既不受曲折形弹簧16a至16d的凸形/凹形弯曲的影响,也不干扰致动器和传感器信号导线的电信号。
36.图2示出微机械构件的第二实施方式的示意性整体示图。
37.在图2中示意性示出的微机械构件是前面描述的实施方式的扩展方案。尤其地,图
2的微机械构件的可调整部件12能够围绕倾斜于/垂直于旋转轴32定向的另外的旋转轴50调整。优选地,所述另外的旋转轴50位于第一对称平面18中(在图2中未画出)。
38.可调整部件12通过两个沿着所述另外的旋转轴50延伸的中间弹簧52a和52b悬挂在内部空间54中,其中,内部空间54固定在连接件40a和40b之间。为了围绕所述另外的旋转轴50调整可调整部件,可以在可调整部件12处和/或在内部空间54处构造至少一个另外的致动器装置56。但是,所述至少一个另外的致动器装置56在图2中仅示意性地描绘出。然而要指出的是,用于围绕所述另外的旋转轴50调整可调整部件12的所述至少一个另外的致动器装置56与用于围绕旋转轴32调整可调整部件12的四个致动器装置24a至24d“分开地”构造。通过四个致动器装置24a至24d与所述至少一个另外的致动器装置56的“分开”构造,这四个致动器装置24a至24d可以与所述至少一个另外的致动器装置56无关地运行,从而更小地影响可调整部件12的不同的调整运动/旋转模式。可调整部件12借助于四个致动器装置24a至24d围绕旋转轴32的调整优选不谐振地进行,而为了围绕所述另外的旋转轴50调整可调整部件12可以借助于所述至少一个另外的致动器装置56激励出可调整部件12围绕所述另外的旋转轴50的谐振振动。
39.关于图2的微机械构件的其他特征参见前面描述的实施方式。
40.图3a和3b示出微机械构件的第三实施方式的整体示图和部分示图。
41.在图3a和3b中示意性示出的微机械构件是前面描述的实施方式的扩展方案。作为对上面阐释的特征的补充,曲折形弹簧16a至16d的各两个相邻的构造有压电致动器层24a至24d的部分区段34a和34b、例如相同的曲折形弹簧16a至16d的各一个第一部分区段34a和各一个第二部分区段34b通过各一个中间弹簧元件60相互连接。中间弹簧元件60例如可以是u弹簧60。优选地,中间弹簧元件60构造在相同的曲折形弹簧16a至16d的两个相邻的构造有压电致动器层24a至24d的和垂直于旋转轴32延伸的部分区段34a和34b的中间,因为在这种情况下在将拉应力施加到两个部分区段34a或34b中的一个部分区段上并且同时将弯曲应力施加到两个部分区段34a或34b的另一个部分区段上时相应的中间弹簧元件60的锚固区域几乎不偏移。
42.关于图2的微机械构件的另外的特征参见前面描述的实施方式。
43.图4示出微机械构件的第四实施方式的示意性部分示图。
44.在图4的微机械构件中,第一曲折形弹簧16a的中间区段36中的至少一个中间区段(和相应第三曲折形弹簧16c的中间区段36中的至少一个中间区段)通过各一个接片元件62与第二曲折形弹簧16b的对此关于第一对称平面18镜面对称的中间区段36(或第四曲折形弹簧16d的对此关于第一对称平面18镜面对称的中间区段36)连接。接片元件62以优选的方式平行于旋转轴32延伸。接片元件62有助于期望地保持弹簧16a至16d的变形的对称,并且由此附加地减小干扰模式的激励的频率率/强度。尤其地,第一曲折形弹簧16a的关于第一曲折形弹簧16a的部分区段34a和34b位于远离旋转轴32指向的侧上的中间区段36的每一个中间区段(和相应第三曲折形弹簧16c的关于第三曲折形弹簧16c的部分区段34a和34b位于远离旋转轴32指向的侧上的中间区段36中的每一个中间区段)可以通过各一个接片元件62与第二曲折形弹簧16b的对此关于第一对称平面18镜面对称的中间区段36(或第四曲折形弹簧16d的对此关于第一对称平面18镜面对称的中间区段36)连接。
45.如在图4中示出,除了相对应的固定接片38a或38b附加地,曲折形弹簧16a和16b的
内端部22a至22d还可以通过各一个弹动悬挂部64接合在可调整部件12或内部空间54处。弹动悬挂部64实现“去应力单元”,通过该去应力单元可以补偿在曲折形弹簧16a至16d变形过程中出现的拉应力。相应的弹动悬挂部64例如可以呈曲折形弹簧64的形式构造,该曲折形弹簧在第一端部上接合在相对应的曲折形弹簧16a和16b的内端部22a至22d处并且在第二端部上接合在可调整部件12或内部空间54处。
46.关于图4的微机械构件的另外的特征参见图1的前面描述的实施方式。
47.图5a至5d示出微机械构件的第五实施方式的整体示图和部分示图。
48.在图5a至5d中示意性示出的微机械构件仅具有第一曲折形弹簧16a和与第一曲折形弹簧16a关于第一对称平面18镜面对称地构造的第二曲折形弹簧16b。在图5a至5d的微机械构件中取消另外的曲折形弹簧。然而,由于可调整部件12通过分别沿着旋转轴32延伸的第一扭转弹簧26a和第二扭转弹簧26b的附加(直接的或间接的)接合,在取消另外的曲折形弹簧时可调整部件12围绕旋转轴32的期望的调整运动本身能够可靠地实施,其中,干扰模式的频率相对于现有技术明显减小。
49.有利地,第一扭转弹簧26a的外端部28a固定在第一固定接片70a上并且第二扭转弹簧26b的外端部28b固定在第二固定接片70b上,其中,固定接片70a和70b垂直于旋转轴32走向并且第一固定接片70a布置在第一曲折形弹簧16a和可调整部件12或围绕可调整部件12的内部空间72之间,并且第二固定接片70b布置在第二曲折形弹簧16b和可调整部件12或内部空间72之间。如在图5a中可看出,扭转弹簧26a和26b在这种固定接片70a和70b上的接合能够实现曲折形弹簧16a和16b垂直于旋转轴32的相对较大的延展。
50.如在图5b中可看出,固定接片70a和70b可以具有大于扭转弹簧26a和26b的高度和宽度。借助于固定接片70a和70b的这种构造能够可靠地抑制可调整部件12从两个扭转弹簧26a和26b的平面的不期望的“提升出来”或可调整部件12垂直于旋转轴32的干扰模式。
51.在图5a至5d的微机械构件中,旋转轴32也可以不(仅)通过曲折形弹簧16a和16b的构造、而是通过扭转弹簧26a和26b的构造固定。通过改变扭转弹簧26a和26b的位置可以改变旋转轴32的位置。此外,可以借助于扭转弹簧26a和26b的构造确定可调整部件12围绕旋转轴32的期望的调整运动的固有频率。通过改变曲折形弹簧16a和16b的内端部22a和22b的作用点可以改变在可调整部件12或围绕的内部空间72上引起的转矩。
52.图5c示出用于将所述至少一个电压信号施加到第一曲折形弹簧16a和第二曲折形弹簧16b的压电致动器层24a和24b上的至少一个电导线74和构造在第一扭转弹簧26a和/或第二扭转弹簧26b上和/或中的至少一个信号导线76以用于连接所述至少一个传感器装置44,所述传感器装置构造在可调整部件12或围绕的内部空间72上和/或中。由此,图5a至5d的微机械构件也具有驱动和探测元件的分开,由此防止在通过导线74和76引导的信号之间的串扰。
53.关于图5a至5d的微机械构件的另外的特征参见前面描述的实施方式。
54.图6示出用于阐释制造方法的实施方式的流程图。
55.所有上面描述的微机械构件可以借助于下面描述的制造方法来制造。然而,所述制造方法的可实施性不局限于上面描述的微机械构件的制造。
56.在方法步骤s1中,将可调整部件通过至少一个第一曲折形弹簧和与第一曲折形弹簧关于第一对称平面镜面对称地构造的第二曲折形弹簧接合到支架上,其中,各个曲折形
弹簧的各一个外端部直接地或间接地接合在支架上并且各个曲折形弹簧的各一个内端部直接地或间接地接合在可调整部件上。此外,在方法步骤s2中,将至少一个第一致动器装置这样构造在第一曲折形弹簧上和/或中并且将第二致动器装置这样构造在第二曲折形弹簧上和/或中,使得在之后的微机械构件运行时借助于第一致动器装置和第二致动器装置激励出第一曲折形弹簧和第二曲折形弹簧的周期性的和关于第一对称平面镜面对称的变形,由此关于支架调整可调整部件。
57.所述制造方法也包括方法步骤s3,在该方法步骤中构造分别沿着旋转轴延伸的第一扭转弹簧和第二扭转弹簧,其中,各个扭转弹簧的各一个外端部直接地或间接地接合在支架上并且各个扭转弹簧的各一个内端部直接地或间接地接合在可调整部件上。这导致,可调整部件至少借助于第一曲折形弹簧和第二曲折形弹簧的周期性的和镜面对称的变形关于支架围绕旋转轴调整。由此,这里描述的制造方法也引起上面阐释的优点。为了实施方法步骤s1和s3,各个部件例如可以由单晶硅、多晶硅或外延多晶硅(epi
‑
polykristallinen silizium)、特别是由soi衬底(silicon
‑
on
‑
isolator
‑
substrat,绝缘体上硅衬底)的硅层结构化出。
58.作为可选的扩展方案,所述制造方法还可以包括方法步骤s4和s5。在方法步骤s4中构造传感器装置,以用于提供或输出至少一个相应于可调整部件从其静止位置关于支架的偏移的传感器信号。在方法步骤s5中,将传感器装置通过至少一个构造在第一扭转弹簧和/或第二扭转弹簧上和/或中的信号导线与构造在支架上的分析处理电子部件或构造在支架上的分析处理电子部件
‑
接合触点连接。借助于相应的方法步骤也可以构造上面描述的微机械构件的其他部件。在技术上能够以简单的方式实现上面描述的微机械构件。
59.方法步骤s1至s5能够以任意的顺序、在时间上重叠地或者同时地实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1