具有基底和两个带光波导的结构元件的组件以及制造方法与流程
[0001]
本发明涉及半导体技术领域和微机械学领域以及光学领域,并且可以特别有利地应用在微电子学和光子学的混合集成领域。
背景技术:
[0002]
除了将电子构件集成到半导体结构元件中之外,光学和光电子学结构元件的集成及其小型化也在不断发展。典型的光电子学结构元件在此为激光源、调制器、光电二极管和类似物。通常将这些结构元件组合到具有分路器(splitter)、耦合器、移相器,延时线路、环形谐振器、光放大器、开关或其它元件的光集成电路中,其中,在结构元件内部,光通常被光波导引导。波导可以在构件之间实现为单独的光波导纤维亦或相应基底中的集成波导。在此如果仅应传输单独的光模式,则需要所谓的单模波导,其部分地具有从几百纳米到若干微米的直径。
[0003]
如果应将光从一个光波导传输到第二光波导中、即两个光波导彼此联接,则对定位精度的要求特别高。联接的要求特别苛刻的实现是两个光波导的端侧设置结构,在该设置结构中,这两个光波导沿共同的轴线定向并在端侧相对彼此设置。例如,这种问题例如在联接集成到两个不同结构元件中的光波导时产生,其中,结构元件相对彼此定向为,使得不同结构元件的光波导在端侧彼此联接。
[0004]
原则上可能的是,在光从第一结构元件的光波导联接到第二结构元件的光波导期间,对这种结构元件相对彼此进行校准,以便通过测量传输的光来优化联接并因此优化校准。然而,该方法的成本非常高并且在批量生产中是非常昂贵的。
[0005]
还提出的是,在装配期间使用液体焊料来自我校准结构元件。在此使用液体焊料的表面张力,以便将结构元件拉到最佳位置中。此外,可以设置有机械止挡,以限定相应的额定额定位置。
技术实现要素:
[0006]
基于现有技术的背景,本发明的目的是:提供一种结构元件的组件,所述结构元件在基底上具有光波导,该组件能够实现不同结构元件的光波导相对彼此在额定位置中的简单且可靠的定位。
[0007]
所述目的根据本发明通过具有权利要求1特征的组件得以实现。权利要求2至6提出了本发明的可能实施方式。本发明还涉及用于装配的基底以及用于装配具有两个结构元件的组件的方法,所述结构元件在基底上具有光波导。
[0008]
依此,本发明涉及至少具有一个第一结构元件和一个第二结构元件以及装配装置的组件,所述装配装置具有至少一个照相机和可控制的机械操纵装置,所述第一结构元件和第二结构元件分别与共同的平整的基底牢固地连接,并且每个结构元件具有至少一个光波导,其中,这些结构元件在基底上紧接着彼此设置并且相对彼此设置为,使得这些结构元件的两个联接侧在联接平面的两侧上彼此对置并且不同结构元件的分别在联接侧上的联
接面上终止的至少两个光波导彼此对齐地定向并定位为,使得它们在端侧彼此光联接。
[0009]
联接平面也可以与结构元件的一个联接侧或两个联接侧相同,或者与延伸穿过光波导在结构元件的联接侧上的端侧联接部位的平面相同。
[0010]
所述目的根据本发明通过以下方式得以实现:基底在其朝向结构元件的表面上具有可光学识别的第一基底标记组以及可光学识别的第二基底标记组,使得每个基底标记组分别具有至少一条直的、特别是至少两条直的、彼此平行并且彼此隔开的线,其中,所述线或其直的延长部分别贯穿联接平面,使得第一结构元件具有第一结构元件标记组,并且第二个结构元件具有第二结构元件标记组,其中,结构元件标记组分别具有直的可光学识别的线,所述可光学识别的直线平行于待联接的光波导的纵向轴线延伸,并且所述装配装置设置为,将结构元件和基底如下组装,使得所述结构元件借助结构元件标记组仅光学地对齐基底标记组的线上。
[0011]
标记例如也可以由两个或更多个可光学识别的点或点组构成,该点或点组位于一条直线上、例如也以中断线的形式。
[0012]
所述结构元件通常是其中包含有、特别是集成有光学元件的结构元件。另外,电子元件可以集成到结构元件中。结构元件分别在其联接侧具有联接面,待彼此联接的光波导在这些联接面上终止。为了在结构元件的联接侧或联接边棱上为光波导构成在光学方面尽可能良好限定的出射面,结构元件和/或波导可以沿能容易切割的晶体定向以整洁的面断裂,其可以利用平版印刷结构化(lithographisch strukturiert)的掩模在干蚀过程中产生,或者其可以通过抛光结构元件的联接侧来实现尽可能良好限定的联接面。在所有情况下,在构成结构元件上的出射面时都出现公差。这导致,在许多情况下为了达到最佳位置必须将结构元件线性地推向彼此,以便将结构元件彼此联接并且设定在待联接的光波导的出射面之间的尽可能小的距离。出于此原因提出的是,基底标记组包含笔直的、彼此平行的线,结构元件可以沿着这些线被推向彼此。因此可以无关于在构成出射面时已去除了多少待彼此连接/联接的结构元件地设定在结构元件的联接侧之间的最佳距离。为了优化两个结构元件相对彼此的角度定向,有利的是,在基底标记组和结构元件标记组中分别设置多条彼此隔开的平行线。但是,在标记组中的一根单线也可以够用。为此例如可以设定,该线在整个结构元件上延伸。
[0013]
在装配状态中,结构元件的联接面在联接平面的两侧彼此对置。在此,联接面与联接平面之间的距离可以随意小,使得联接面在边界值中也可以两个都位于联接平面中并且还彼此触碰。
[0014]
标记组的各条线是可光学识别的并且也可以被自动安装设备的光学识别系统识别。标记组的线例如可以以蚀刻方法施设到基底和结构元件上。为此例如也可以使用掩膜,该掩膜用于在结构元件上构成光波导。
[0015]
在结构元件上,例如光波导自身或其中设置有光波导的沟槽或接桥(steg)的边棱也可以用作标记组的线。原则上,在产生标记组的线时可以尝试,通过蚀刻或施设标记物质产生尽可能窄的条带。然而也可以想到的是,在结构元件或基底上标记可见的面,其中,该面的至少一个边棱精确地限定并且直延伸并构成标记组的线。原则上,标记组的线可以由接桥或沟槽的边缘或直的边棱构成,所述边缘或边棱在微机械半导体加工的情况下,特别是通过蚀刻产生在结构元件或基底上。
[0016]
借助照相机可以检测并存储基底标记组的形状、位置和定向。结构元件由此可以借助操纵装置抓取和定位,使得结构元件标记组与基底标记组对齐或者覆盖在其上。为此当构件已经遮盖基底的表面时,也可以将基底标记组的之前拍摄的图片与构件标记组的图片进行比较。一处理和控制装置进行图片比较。
[0017]
本发明的一种可能的设计方案可以设定,在两个结构元件中的待联接的光波导在装配在基底上之后以距基底表面相同的距离延伸,其中,光波导特别是分别在结构元件的朝向基底的一侧上设置在其表面上。为此例如可以设定,光波导在第一和第二结构元件的表面上延伸,其中,两个结构元件分别具有相同的厚度。对此可选地,在光波导不同地定位在不同的结构元件中时必须通过在基底中的合适的垫座补偿高度差。
[0018]
另一种设计方案可以设定,结构元件与基板以倒装芯片技术连接。倒装芯片技术或倒装芯片装配理解为用于触点接通结构元件的构造和连接技术的方法,在其中,结构元件直接并且在不使用绑定线的情况下以触点接通侧侧朝基底定向地装配。然后将结构元件的接触面直接压到基底的焊丘(kontakthuegel)(凸块)上并因此与基底电接触。也可以将基底上压印的或以其它方法施设的焊料量设置为焊丘,该焊料量为了最终的触点接通而至少可以部分地液化。
[0019]
待联接的光波导可以在结构元件上分别设置在与接触侧对置的一侧上。那么在倒装新品装配中,待联接的光波导可良好接近地位于结构元件的上侧上。在该侧上还设置有结构元件标记组。但是,光波导也可以位于结构元件的、特别是结构元件的表面上的朝向基底的接触侧上。
[0020]
所述组件的另一种实施方式可以设定,基底标记组中的至少一个基底标记组具有平行于联接平面延伸的线。原则上,所述结构元件可以沿基底标记组的贯穿联接平面的线在一定范围中自由移动。基底标记组的平行于联接平面延伸的线可以用于使至少一个结构元件相对联接平面定位。例如在结构元件的联接侧上的前边棱可以覆盖基底标记组的平行于联接平面延伸的线。然后第二结构元件可以在基底标记组的另外的平行于联接平面延伸的线,或者也可以在第一结构元件的联接侧上定向。
[0021]
另外例如可以设定,标记组的一条或多条线是可光学识别的面的线条或边棱。
[0022]
此外可以规定,基底标记组的和/或结构元件标记组的一条或多条线或所有线与联接平面以小于90度的角定向并且在联接面的区域中平行于结构元件的待联接的光波导的纵向轴线延伸,所述线或其延长部贯穿联接平面。
[0023]
通常在结构元件的联接侧上,光波导不垂直于结构元件在联接侧上的相应的联接面引导,而是以偏离垂直方向的角引导,以便避免或最小化在光波导的出射面上的反向反射。在这种情况下有意义的是,为了产生最佳距离,结构元件相对彼此沿待彼此联接的光波导的纵向轴线移动,以避免横向的偏移。出于此原因,基底标记组的和结构元件标记组的线分别平行于待联接的光波导定向并且在上述情况下不垂直于结构元件的联接面/联接侧延伸,而是以与联接面/联接侧成不同于90度的角延伸,所述线贯穿联接平面或其延长部贯穿联接平面。
[0024]
除了上面提到和说明类型的组件之外,本发明还涉及用于至少装配一个第一结构元件和一个第二结构元件的基底,所述结构元件分别借助倒装芯片技术与所述基底牢固连接,其中,结构元件的两个联接侧在一个共同的联接面的一侧或两侧上彼此对置,并且不同
结构元件的在联接面中的联接侧上终止的至少两个光波导彼此对齐地定向并定位为,使得所述两个光波导在端侧彼此光联接。所述目的则根据本发明通过以下方式得以实现,即,基底在其朝向结构元件的表面上具有用于使结构元件定位的可光学识别的第一基底标记组以及可光学识别的第二基底标记组。
[0025]
本发明还涉及用于装配至少具有一个第一结构元件和一个第二结构元件的组件的方法,所述结构元件分别与一个共同的平整的基底牢固连接,并且每个结构元件具有至少一个光波导,其中,这些结构元件在基底上紧接着彼此设置并且相对彼此设置为,使得结构元件的两个联接侧或联接面在一个共同的联接平面的一侧或两侧上彼此对置,并且不同结构元件的在联接侧上终止的至少两个光波导彼此对齐地定向并定位为,使得所述两个光波导在端侧彼此光联接,其中,第一结构元件具有第一结构元件标记组,并且第二结构元件具有第二结构元件标记组,所述结构元件标记组分别具有至少一条直的、特别是至少两条直的、彼此平行且彼此隔开的线,所述线平行于待联接的光波导的纵向轴线延伸,其中,基底在其朝向结构元件的表面上具有可光学识别的第一基底标记组以及可光学识别的第二基底标记组,其中,在所述方法的过程中首先将第一结构元件以其结构元件标记组的线在第一基底标记组的线上定向并且与基底联接,然后将第二结构元件以其结构元件标记组的线在第二基底标记组的线上定向,并且特别是以与第一结构元件尽可能小的距离与基底连接。
[0026]
作为替代,也可以设定第二结构元件标记组在已经与基底连接的结构元件的第一结构元件标记组上定向,来代替第二结构元件标记组在第二基底标记组上的定向。
[0027]
结构元件借助基底标记组和结构元件标记组的定向例如可以通过基于照相机的自动识别和安装系统实现。所述定向以如下方式实现:不同标记组的线从结构元件的上侧看起来彼此覆盖或者定向为,使得基底标记组的线构成结构元件标记组的设置在基底标记组的线的上方的线的直的延长部。
[0028]
在该方法中例如还可以设定,两个结构元件借助凸块触点紧固在所述基底上。凸块触点可以均匀地产生,使得它们分别具有距基底相同的、限定的高度,使得结构元件的平整的接触面可以平行于基底的表面指向凸块触点。凸块触点可以设计为,使得能够通过特别是与其它物理或化学作用类型结合的压力分别建立在结构元件的接触面与基底之间的传导连接并且同时结构元件与基底可以机械地牢固连接。
[0029]
另外例如可以设定,在紧固在基底的凸块触点上期间或借助焊接方法紧固在基底上期间,将结构元件放置到不可变形的且与基底连接的机械限位件上。机械限位件可以构造为导电的或不导电的并且例如可以仅用于限定构件在基底上的位置。因此,它们仅构成机械止挡,并且电触点接通通过另外的标记点或焊丘产生。在这种情况下,电触点接通也可以通过焊点构成,这些焊点在其液化时无法允许触点接通的结构元件相对基底的足够精确限定的定位;然而通过机械限位件,必要情况下与在焊接方法期间施加到结构元件上的压力结合,结构元件可以通过焊接与基底连接并且同时可以实现结构元件在基底上方的足够精确的定位。
附图说明
[0030]
下面借助附图中的实施例示出并接着描述本发明。附图中:
[0031]
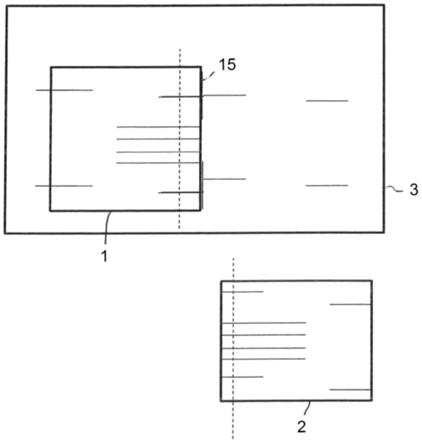
图1示出了装配前的基底和两个结构元件的视图;
[0032]
图2示出第一结构元件已装配而第二结构元件在装配前的基底;
[0033]
图3在下部示出了两个结构元件已装配的基底以及在上部示出了两个结构元件已装配且被削减的基底;
[0034]
图4示出了两个结构元件在装配前的基底,其中,结构元件在联接侧上具有倾斜延伸的光波导;
[0035]
图5示出了图4所示的基底,其中第一结构元件已装配而第二结构元件在装配前;
[0036]
图6在下方示出了图4所示的基底,其中两个结构元件已装配,在中间示出了两个结构元件在装配前且被削减的基底,并且在上方示出了两个结构元件已装配且被削减的基底;
[0037]
图7示出了两个结构元件在装配前的基底的侧视图;
[0038]
图8示出了两个结构元件静置在凸块触点上的基底;
[0039]
图9示出了带两个在限位件凸块触点上的结构元件的基底,其具有额外的机械限位件;
[0040]
图10示出了以焊接带两个结构元件并且带机械限位件的基底;
[0041]
图11示出了带两个结构元件和另一种类型的机械限位件以及在结构元件与基底之间具有焊接的基底。
具体实施方式
[0042]
图1示出了基底3以及装配在基底上之前的第一结构元件1和第二结构元件2。基底3具有第一基底标记组11、12、13、14、15以及第二基底标记组16、17、18、19、20。两个结构元件1、2应该沿联接平面10通过它们的联接侧8、9、具体而言通过它们的联接面8a、9a联接并且装配在基底3上。由此应确保的是,光可以在第一结构元件上的光波导4、5与第二结构元件2上的光波导6、7之间高效地联接。
[0043]
第一结构元件具有第一结构元件标记组21、22、23、24,其中,该结构元件标记组的各条线分别平行于结构元件1、2上的光波导的纵向轴线29、30延伸并且在装配状态下垂直于联接平面10延伸。第二结构元件2具有第二结构元件标记组25、26、27、28。
[0044]
示意性地示出了结构元件上的光波导4、5、6、7。它们在结构元件上可以分别与光学元件,例如激光二极管、光电二极管或其它有光学活性元件连接,出于清楚的原因在此未示出这些元件。
[0045]
另外,在图1中画出了两条虚线60、61,其表示用于联接的结构组件1、2在装配在基底3上之前在其联接侧上直到这些线为止被磨光/抛光、干法蚀刻或者可以在这些线上被折断/切割,以分别产生光滑的联接面,该联接面实现光波导的良好且无损失的联接。结构元件1、2的这种处理可以在设置结构元件标记后进行。结构元件标记组的线21、24、25、26在再加工结构元件时,至少部分地保留。因此,尽管结构元件发生了变化,结构元件标记仍可以覆盖相应的基底标记。
[0046]
图1除了所述基底和结构元件之外还示出照相机100和操纵装置101以及图片处理和控制装置,所述照相机也可以通过包括多个照相机的系统代替,所述操纵装置可以构造为安装自动机。所述操纵装置具有用于抓取结构元件的抓取臂103,104。
[0047]
在图2中示出了图1的基底3,其中第一结构元件1放置并安装到基底上。第一结构元件1在此以其第一结构元件标记组的线21、22、23、24分别在第一基底标记组的线11、12、13、14上定向为,使得线21覆盖线11,线22覆盖线12,线23覆盖线13,线24覆盖线14。第一结构元件1的联接面8a覆盖第一基底标记组的线15,该线平行于联接平面10延伸并且特别地位于联接平面10中。为了清楚起见,在图2和3中省略了标记组的各条线的附图标记,这是因为不同标记组的线彼此重叠地设置并且因此不可区分。
[0048]
在图3中,在下部示出了具有两个已装配的结构元件1、2的基底3,其中,结构元件标记组覆盖相应的基底标记组。光波导4、5、6、7分别成对地彼此同轴地定向并且在端侧对接地联接。
[0049]
在图3中,在视图的上部中示出了在相应地缩短结构元件的再加工之后的第一结构元件1和第二结构元件2的装配。结构元件1、2的缩短由此示出,即,这些结构元件在沿联接平面10设置联接面之后在基底3上占据较少的空间。为了比较,在图3中画出了虚线62、63,这些虚线示出了装配后未变化、未加工形式的结构元件1、2的端部(例如在图3的下部)。经加工的结构元件在加工/缩短之后被简单地沿标记组的线推到联接平面10上。
[0050]
在图4中,在上部示出了具有两个基底标记组41、42、43、44、45、46,47、48、64的基底3',所述两个基底标记组以小于90度的角α相对联接平面10延伸。角α对应在结构元件1'、2'上的光波导4'、5'的端部与联接平面10或各个结构元件的联接面8a所围成的角。
[0051]
光波导4'、5
’
在相应的结构元件1'、2'的联接面附近的联接侧上设置为不垂直于联接面延伸、而是稍微斜置,以防止在联接面上的反向反射。在结构元件1'和2'中,光波导的纵向轴线在联接区域中标记为31和32。
[0052]
结构元件标记组的各条线33、34、35、36、37、38、39、40平行于在联接区域中、也就是说在联接面8a、9a附近的光波导端部的纵向轴线31、32定向并且与联接平面10围成与基底标记组的相应的线围成的相同的角度α。
[0053]
在图4中画出了虚线60、61,这些虚线表示在加工结构元件1'、2
’
之后以及通过抛光或切割去除结构元件1'、2'的部分之后的联接面8a、9a的走向。结构元件1'、2'的这种加工并非在所有情况下都是必需的,但是可以是有意义的。结构元件1'、2'的加工在设置结构元件标记组之后进行。
[0054]
图5示出了图4的基底3,其具有装配在其上的结构元件1'。第一结构元件1'的结构元件标记组覆盖基底3'上的基底标记组。第一结构元件1'的联接面8a在基底标记组的标记/线64上定向,使得联接表面8a位于联接平面10中。
[0055]
在图6中,在下部示出了图5的基底3',其中也装配有第二结构元件2'并且该第二结构元件与结构元件1'联接,使得光波导4'、5'与在第二结构元件2'上的光波导6'、7'在端侧对接地联接。两个结构元件1'、2'的结构元件标记组覆盖基底3'的基底标记组。线60、61表示在抛光或切割后的结构元件1'、2'的潜在的联接面,与附图的下部无关。
[0056]
如果通过抛光或切割在联接面的区域中对结构元件1'、2'进行再加工,则在加工后沿线60、61获得新的联接面,并且结构元件1'、2'会缩短一些。这在将结构元件1'、2'放置到在图6中部的基底3'上之后显示出。两个结构元件1'、2'在缩短之后尚未通过其联接表面在接口侧紧接着彼此设置,而是应该为了优化的联接在所述结构元件装配在基底3'上之前将这些结构元件相对彼此推动直到联接平面10为止。各结构元件1'、2'的这种推动沿着基
底标记组的斜置的线41、42、43、44、45、46、47、48进行,使得在结构元件的移动过程期间,结构元件标记组能够保持覆盖基底标记组。光波导4'、5'、6'、7'的斜置的端部在移动期间保持彼此平行地定向,直到以最小可能的距离实现需在端侧联接的光波导的对接联接或设置。通过斜置标记组的线实现:当结构元件1'、2'在联接面区域中通过抛光或切割缩短时,不必更改标记组。这与结构元件1'、2'的去除层的厚度无关,只要新的联接面位于光波导4'、5'、6'、7
’
相对联接平面10以相同的角度斜置的区域中。
[0057]
在图6的上部区域中,示出了结构元件1'、2'在基底3'上的最终装配状态中。虚线62、63表示结构元件缩短的尺寸。
[0058]
原则上不仅可以在如图4、5和6所示的具有斜置的标记线的标记组中,也可以在线垂直于联接平面延伸的标记组中分别使用平行的、紧密设置的线对来代替单线。例如,基底标记组的线可以分别设计为双重线,使得结构元件标记组的单线可以分别定位在一个基底标记组的一个标记的两条线之间。反过来也可能的是,结构元件标记组分别配备有双重线,使得一个结构元件标记组的两条紧密设置的并且彼此平行延伸的线分别相对基底定位为,使得基底标记组的一个单独的线位于一个结构元件标记组的双重线的相应紧密设置的线之间。双重线的分别紧密设置在一起的线之间的距离应分别小于线宽的四倍、特别是小于线宽的两倍。
[0059]
图7示出基底3以及装配前的两个结构元件1、2。可以看到的是,集成到结构元件1、2中的光波导4、6位于所述结构元件的下侧(接触侧)上,也就是说,在结构元件的朝向基底3的一侧上。如果两个结构元件1、2相对基底3可以以相同的高度装配,则以此方式获得光波导4、6在相同高度上的定位,而与结构元件1、2的厚度无关。经验表明,结构元件1、2的厚度是波动的,因而在光波导4、6定位在结构元件的上侧上、也就是说在背离基底3的一侧上时,会发生较低效率的联接或者会需要额外的校准。
[0060]
装配任务在于,将结构元件1、2以相同的高度紧固在基底3上。在图8中示出了结构元件1、2可以被装配在所谓的凸块触点49、50上。结构元件1、2的连接面例如通过施加足够的压力来触点接通地并且机械固定地与凸块触点49、50连接。由此如果在两个结构元件中的波导平面设置在表面下方的相同深度处,则仅通过对凸块触点49、50的高度的足够精确的设定就可以确保结构元件1、2在相同高度的紧固。
[0061]
图9在图8基础上额外示出了在装配状态下的机械限位件51、52。这些机械限位件例如可以由基底3的材料制成,该材料例如可以由硅或其它半导体材料构成。机械限位件51、52可以在一个集成的制造过程中与基底共同制造,或者也可以之后作为分开的构件被安装、例如被粘贴。因此,结构元件1、2在基底上方的高度的设定与凸块触点49、50的变形控制无关。
[0062]
在图10中示出了,结构元件1、2与基底的距离在纯焊接方法的情况下也可以很好地保持。在图10中,焊点53、54作为接触元件示出,所述焊点不仅可以在结构元件1、2与基底3之间建立电接触、还可以建立机械连接。此外,牢固的机械止挡由机械限位件51、52提供,所述机械限位件牢固地与基底3连接并且例如由与基底3相同的材料制成。机械限位件51、52可以与基底3一件式地制造。
[0063]
在图11中示出了,当在结构元件1、2和基底3之间使用焊接连接时,可以使用机械限位件51'、52',所述机械限位件与基底3分开地制造并且例如可以与基底粘接。这些分开
的机械限位件例如也可以电镀添加地安装并且由铜、镍或金或其它金属构成。结构元件与基底的电连接可以通过热焊接、回流焊接或焊料沉积物的熔化或再熔化实现。
[0064]
凸块触点与结构元件1、2之间的绑定连接可以通过金-金热压焊接产生。凸块触点的高度公差可以保持地很低,例如低于5%。这可以通过平整进一步改善,并最小化到大约100纳米的范围上。
[0065]
如果将凸块接触表面平整并且化学活化,则可以再实现更小的公差,这则是因为可以以较低的绑定温度以及较低的绑定力实现装配,其中,凸块触点的变形和装配之后的高度公差进一步被最小化。
[0066]
因此总体上获得不同结构元件的光波导相对彼此在垂直于基底的方向上以及在平行于基底表面的方向上的定位的最优精度,并且因此获得最优的光学冲击耦合。
[0067]
导致该申请的项目由欧盟地平线2020研究与创新计划根据第761989号资助协议资助。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1