分段对准建模方法与流程
分段对准建模方法
[0001]
本申请是申请日为2017年7月7日、申请号为201780021844.6、发明名称为“分段对准建模方法”的发明专利申请的分案申请。
技术领域
[0002]
本公开内容的实施方式一般涉及无掩模光刻的领域。更具体地,本文提供的实施方式涉及一种用于响应于覆盖误差来调整基板的曝光参数的系统和方法。
背景技术:
[0003]
光刻被广泛地用于制造半导体器件和显示装置,诸如液晶显示器(lcd)。大面积基板常常用于制造lcd。lcd或板件通常用于有源矩阵显示器,诸如计算机、触摸面板装置、个人数字助理(personal digital assistant,pda)、蜂窝电话、电视机监视器和类似装置。通常,板件可以包括夹在两个板之间的形成像素的液晶材料层。当在液晶材料上施加来自电源的功率时,可以在像素位置处控制经过液晶材料的光的量,从而使得能够产生图像。
[0004]
微光刻(microlithography)技术一般用于产生作为形成像素的液晶材料层的一部分而并入的电特征。根据此技术,通常将光敏光刻胶施加到基板的至少一个表面。然后,图案发生器(pattern generator)用光曝光作为图案的一部分的光敏光刻胶的选定区域,以导致选择性区域中的光刻胶的化学变化,以准备这些选择性区域用于后续的材料移除和/或材料添加工艺,以产生电特征。
[0005]
为了持续向消费者提供符合消费者期望的价格的显示装置和其它装置,需要新的设备、方法和系统来精确且成本有效地在基板(诸如大面积基板)上产生图案。
技术实现要素:
[0006]
本文公开的实施方式一般涉及响应于覆盖误差来调整基板的曝光参数。方法包括将基板划分为多个区段。每个区段对应于图像投影系统。确定沉积在基板上的第一层的总覆盖误差。针对每个区段,计算区段覆盖误差。针对其中两个或多个区段重叠的每个重叠区域,计算平均覆盖误差。响应于总覆盖误差来调整曝光参数。
[0007]
在另一实施方式中,本文公开了一种用于响应于总覆盖误差来调整基板的曝光参数的计算机系统。计算机系统包括处理器和存储器。存储器存储指令,当由处理器执行时,指令致使处理器执行响应于覆盖误差来调整基板的曝光参数的方法。方法包括将基板划分为多个区段。每个区段对应于图像投影系统。确定沉积在基板上的第一层的总覆盖误差。针对每个区段,计算区段覆盖误差。针对其中两个或多个区段重叠的每个重叠区域,计算平均覆盖误差。响应于总覆盖误差来调整曝光参数。
[0008]
在又一实施方式中,本文公开了一种非暂时性计算机可读介质。非暂时性计算机可读介质存储指令,当由处理器执行时,指令致使计算机系统通过执行方法的步骤而响应于覆盖误差来调整基板的曝光参数。方法包括将基板划分为多个区段。每个区段对应于图像投影系统。确定沉积在基板上的第一层的总覆盖误差。针对每个区段,计算区段覆盖误
差。针对其中两个或多个区段重叠的每个重叠区域,计算平均覆盖误差。响应于总覆盖误差而调整曝光参数。
附图说明
[0009]
因此,为了能够详细理解本公开内容的上述特征所用方式,可以通过参考实施方式来获得上文简要地概述的本公开内容的更具体的描述,一些实施方式在随附附图中示出。然而,将注意,随附附图仅示出本公开内容的示例性实施方式,并且因此不应被视为限制本公开内容的范围,因为本公开内容可允许其它等效实施方式。
[0010]
图1是可获益于本文公开的实施方式的系统的透视图。
[0011]
图2是根据一个实施方式的多个图像投影系统的示意性透视图。
[0012]
图3示意性地示出根据一个实施方式的由dmd的两个镜子反射的束。
[0013]
图4是根据一个实施方式的图像投影设备的透视图。
[0014]
图5示出根据一个实施方式的计算机系统。
[0015]
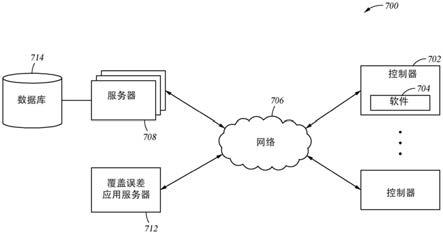
图6示出根据一个实施方式的图5的服务器的更详细示图。
[0016]
图7示出根据一个实施方式的控制器计算系统。
[0017]
图8示意性地示出用于响应于覆盖误差来调整基板的曝光参数的方法的操作。
[0018]
图9示出根据一个实施方式的在其上沉积有第一层的基板的俯视图。
[0019]
为了促进理解,在可能的情况下,已经使用相同的附图标记表示各图中共有的相同元件。将预期,一个实施方式的要素和特征可能有利地并入其它实施方式而无需赘述。
具体实施方式
[0020]
本文公开的实施方式一般涉及响应于覆盖误差来调整基板的曝光参数。方法包括将基板划分为一个或多个区段。每个区段对应于图像投影系统。确定沉积在基板上的第一层的总覆盖误差。针对每个区段,计算区段覆盖误差。针对其中两个或多个区段重叠的每个覆盖区域,计算平均覆盖误差。响应于总覆盖误差而调整曝光参数。
[0021]
如本文使用的术语“用户”包括例如:拥有计算装置或无线装置的个人或实体;操作或利用计算装置或无线装置的个人或实体;或以其它方式与计算装置或无线装置相关联的个人或实体。将预期,术语“用户”不意欲为限制性的,并且可包括除了本文描述的示例之外的各个示例。
[0022]
图1是可获益于本文公开的实施方式的系统100的透视图。以横截面示出的系统100包括基座框架110、板件120、两个或多个平台130和处理设备160。在某些实施方式中,可以使用一个平台130。基座框架110可以放置在制造设施的地面上并且可以支撑板件120。被动式空气隔离器112可定位在基座框架110与板件120之间。板件120可为整片的花岗石,并且两个或多个平台130可设置在板件120上。基板140可由两个或多个平台130中的每个平台来支撑。多个孔洞(未图示)可形成在平台130中以允许多个升降杆(未图示)延伸穿过其中。升降杆可升高到延伸位置以接收基板140,诸如从传送机器人(未图示)。传送机器人可将基板140定位在升降杆上,并且随后升降杆可将基板140缓慢降低到平台130上。
[0023]
基板140可例如由石英制成,并且可用作平板显示器的一部分。在其它实施方式中,基板140可由其它材料制成。在一些实施方式中,基板140可具有在其上形成的光刻胶
层。光刻胶对辐射敏感,并且可为正性光刻胶或负性光刻胶,意味着,在将图案写入光刻胶中之后,光刻胶曝光至辐射的部分将分别可溶于或不可溶于施加到光刻胶的光刻胶显影剂。光刻胶的化学成分确定了光刻胶将是正性光刻胶还是负性光刻胶。例如,光刻胶可包括以下中的至少一种:重氮萘醌、酚醛树脂、聚(甲基丙烯酸甲酯)、聚(甲基戊二酰亚胺)和su-8。以此方式,可在基板140的表面上产生图案以形成电子电路。
[0024]
系统100可进一步包括一对支撑件122和一对轨道124。这一对支撑件122可设置在板件120上,并且板件120和这一对支撑件122可为单块材料。这一对轨道124可由这一对支撑件122支撑,并且两个或多个平台130可沿着轨道124在x方向上移动。在一个实施方式中,这一对轨道124为一对平行的磁性通道。如图所示,这一对轨道124的每个轨道124是线性的。在其它实施方式中,轨道124可具有非线性形状。编码器126可耦接到每个平台130,以便向控制器702(参见图7)提供位置信息。
[0025]
处理设备160可包括支撑件162和处理单元164。支撑件162可设置在板件120上并且可包括用于使两个或多个平台130穿过处理单元164下方的开口166。处理单元164可由支撑件162支撑。在一个实施方式中,处理单元164是图案发生器,所述图案发生器经构造以在光刻工艺中暴露光刻胶。在一些实施方式中,图案发生器可经构造以执行无掩模光刻工艺。处理单元164可包括设置在壳体165中的多个图像投影系统(图2所示)。处理设备160可用于执行无掩模直接图案化。在操作期间,两个或多个平台130中的一个平台在x方向上从装载位置(如图1所示)移动到处理位置。处理位置可指平台130穿过处理单元164下方时的平台130的一个或多个位置。在操作期间,两个或多个平台130可由多个空气轴承200提升,并且可沿着一对轨道124从装载位置移动到处理位置。多个竖直引导空气轴承(未图示)可耦接到每个平台130并且可定位在每个支撑件122的内壁128附近以便稳定平台130的移动。两个或多个平台130的每个平台也可通过沿着轨道150移动而在y方向中移动,以用于处理和/或转位(index)基板140。
[0026]
如图所示,每个平台130包括用于提升平台130的多个空气轴承200。每个平台130也可包括用于沿着轨道124移动平台130的电机线圈(未图示)。两个或多个平台130和处理设备160可由外壳(未图示)封闭以提供温度和压力控制。
[0027]
图2是根据一个实施方式的多个图像投影系统301的示意性透视图。如图2所示,每个图像投影系统301产生到基板140的表面304上的多个写入束302。随着基板140在x方向和y方向上移动,整个表面304可由写入束302来图案化。图像投影系统301的数量可根据基板140的大小和/或平台130的速度而变化。在一个实施方式中,在处理设备160中存在22个图像投影系统301。
[0028]
图像投影系统301可包括光源402、孔隙404、透镜406、镜408、dmd 410、集光器(light dump)412、相机414和投影透镜416。光源402可为发光二极管(led)或激光器,并且光源402可以能够产生具有预定波长的光。在一个实施方式中,预定波长在蓝光或近紫外(uv)范围中,诸如小于约450nm。镜408可为球面镜。投影透镜416可为10x物镜。dmd 410可包括多个镜,并且镜的数量可对应于投影图像的分辨率。在一个实施方式中,dmd 410包括1920x1080镜。
[0029]
在操作期间,具有预定波长(诸如在蓝光范围中的波长)的束403由光源402产生。束403被镜408反射到dmd 410。dmd 410包括可被独立控制的多个镜,并且基于由控制器(未
图示)提供到dmd 410掩模数据,dmd 410的多个镜的每个镜可处于“打开”位置或“关闭”位置。当束403到达dmd 410的镜时,处于“打开”位置的镜将束403反射(即,形成多个写入束302)到投影透镜416。投影透镜416随后将写入束302投影到基板140的表面304。处于“关闭”位置的镜将束403反射到集光器412,而非基板140的表面304。
[0030]
在一个实施方式中,dmd 410可具有两个或多个镜。每个镜可设置在倾斜机构上,所述倾斜机构可设置在存储器单元上。存储器单元可为cmos sram。在操作期间,通过将掩模数据加载到存储器单元中来控制每个镜。掩模数据以二进制方式静电地控制镜的倾斜。当镜处于复位模式或未被施加电力时,镜可被设置到不对应于任何二进制数的平坦位置。二进制中的“零”可对应于“关闭”位置,这意味着镜以-10度、-12度或任何其它可行的负倾斜度倾斜。二进制中的“一”可对应于“打开”位置,这意味着镜以+10度、+12度、或任何其它可行的正倾斜度倾斜。
[0031]
图3示意性地示出由dmd 410的两个镜502、504反射的束403。如图所示,处于“关闭”位置的镜502将从光源402产生的束403反射到集光器412。处于“打开”位置的镜504通过将束403反射到投影透镜416来形成写入束302。
[0032]
每个系统100可以包含任何数量的图像投影系统310,并且图像投影系统301的数量可随系统而变化。在一个实施方式中,存在84个图像投影系统301。每个图像投影系统301可以包含40个二极管,或任何数量的二极管。当尝试维持大量二极管时会产生问题,这是因为需要更高的功率来处置这些大量的二极管。一种解决方案可以是以串联的方式排列二极管;然而,当如下文所述的以串联方式组织时,存在对无功能的二极管进行检测的需求。
[0033]
图4是根据一个实施方式的图像投影设备390的透视图。图像投影设备390用于将光聚焦到基板140的平面上的特定点并且最终将图像投影到基板140上。图像投影设备390包括两个子系统。图像投影设备390包括照明系统和投影系统。所述照明系统至少包括光管391和白光照明装置392。所述投影系统至少包括dmd 410、截锥形(frustrated)棱镜组件288、分束器395、投影光学器件396a、396b中的一个或多个部分、失真补偿器397、聚焦电机398和投影透镜416(如上论述)。投影透镜416包括聚焦分组416a和窗416b。
[0034]
光从光源402引入到图像投影设备390。光源402可为光化性(actinic)光源。例如,光源402可为一束光纤,每个纤维含有一个激光器。在一个实施方式中,光源402可为约100个光纤的束。光纤束可由激光二极管照射。光源402耦接到光管(或kaleido)391。在一个实施方式中,光源402经由组合器耦接到光管391,所述组合器组合光纤束的每个光纤。
[0035]
一旦来自光源402的光进入光管391中,光围绕光管391内部反弹,使得当光离开光管391时,所述光是均一并且是均匀的。在一个示例中,光在光管391中反弹六次或七次。换言之,在光管391内光经过共六至七次的全内部反射,这导致均匀光的输出。
[0036]
图像投影设备390可选地包括各种反射表面(未标记)。所述各种反射表面捕获行进穿过图像投影设备390的一些光。在一个实施方式中,所述各种反射表面可捕获一些光,并随后有助于将所述光引导至光水平感测器393,使得可监控激光水平。
[0037]
白光照明装置392将宽带可见光投影到图像投射到设备390的投影系统中。具体来说,白光照明装置392将光引导至截锥形棱镜组件。光化性和宽带光源可独立于彼此而被打开和关闭。
[0038]
截锥形棱镜组件288用于传递将被投影到基板140的表面上的光。使用截锥形棱镜
组件288导致了最小能量损失,因为全内反射光被输出。截锥形棱镜组件288耦接到分束器395。
[0039]
dmd 410作为截锥形立方体组件的一部分而被包括在截锥形立方体组件内。dmd 410是图像投影设备390的图案发生装置。使用dmd 410和截锥形棱镜组件288通过保持照明流的方向总是大致垂直于基板140来有助于使得从产生曝光照明的光源402到基板焦平面的每个图像投影设备390的占地面积最小化。
[0040]
分束器395用于进一步提取从基板140反射的光的一部分以用于对准。更具体来说,分束器395用于将光分为两个独立的束。分束器395耦接到投影光学器件396。在图4中示出了投影光学器件396a、396b的两个部件。
[0041]
在一个实施方式中,聚焦感测器和相机284附接到分束器395。聚焦感测器和相机284可经构造以监控图像投影设备390的成像品质的各个方面,包括但不限于,通过透镜聚焦和对准,以及镜倾斜角变化。另外,聚焦感测器和相机284可显示图像,所述图像将被投影到基板140上。在进一步的实施方式中,聚焦感测器和相机284可用于捕获基板140上的图像并且在那些图像之间进行比较。换言之,聚焦感测器和相机284可用于执行检验功能。
[0042]
投影光学器件396,失真补偿器397、聚焦电机398和投影透镜416一起准备并最终将图案从dmd 410投影到基板140上。投影光学器件396a耦接到失真补偿器397。失真补偿器397耦接到投影光学器件396b,投影光学器件396b耦接到聚焦电机398。聚焦电机398耦接到投影透镜416。投影透镜416包括聚焦组416a和窗416b。聚焦组416a耦接到窗416b。窗416b为可替换的。
[0043]
光管391和白光照明装置392耦接到第一安装板341。另外,在包括额外的各种反射表面(未标记)和光水平感测器393的实施方式中,各种反射表面和光水平感测器393也可耦接到第一安装板341。
[0044]
截锥形棱镜组件288、分束器395、一个或多个投影光学器件部分396a、396b和失真补偿器397耦接到第二安装板399。第一安装板341和第二安装板399为平面的,这允许精确对准先前提及的图像投影设备390的部件。换言之,光沿着单个光轴行进穿过图像投影设备390。这种沿着单个光轴的精确对准导致了紧凑的设备。例如,图像投影设备390可具有在约80mm与约100mm之间的厚度。
[0045]
图5示出根据一个实施方式的计算系统700。如图所示,计算系统700可包括多个服务器708、覆盖误差应用服务器712和多个控制器(即,计算机、个人计算机、移动/无线装置)702(为了清楚起见,仅示出两个),各者连接到通信网络706(例如,互联网)。服务器708可经由本地连接(例如,存储区域网络(storage area network,san)或网络附属存储(network attached storage,nas))或在互联网上与数据库714通信。服务器708经构造以直接访问数据库714中包括的数据或与数据库管理器对接,所述数据库管理器经构造以管理在数据库714中包括的数据。
[0046]
每个控制器702可包括计算装置的常规部件,例如,处理器、系统存储器、硬盘驱动器、电池、输入装置(诸如鼠标和键盘)、和/或输出装置(诸如监视器或图形用户界面)、和/或不仅接收输入而且还显示输出的输入/输出装置的组合(诸如触摸屏)。每个服务器708和覆盖误差应用服务器712可包括处理器和系统存储器(未图示),并且可经构造以使用,例如,相关数据库软件和/或文件系统管理在数据库714中存储的内容。服务器708可被编程以
使用网络协议(诸如,例如,tcp/ip协议)彼此通信、与控制器702通信和与覆盖误差应用服务器712通信。覆盖误差应用服务器712可经由通信网络706直接与控制器702通信。控制器702被编程以执行软件704,诸如程序和/或其它软件应用,并且访问由服务器708管理的应用。
[0047]
在下文描述的实施方式中,用户可分别操作控制器702,控制器702可通过通信网络706连接到服务器708。可经由控制器702向用户显示页面、图像、数据、文件和类似内容。信息和图像可经由与控制器702通信的显示装置和/或图形用户界面显示。
[0048]
将注意,控制器702可为个人计算机、膝上型移动计算装置、智能电话、视频游戏机、家庭数字媒体播放器、网络连接的电视、机顶盒和/或具有适于与通信网络706和/或所需应用或软件通信的部件的其它计算装置。控制器702也可执行其它软件应用,所述其它软件应用经构造以从基板对准应用服务器712接收内容和信息。
[0049]
图6示出图5的覆盖误差应用服务器712的更详细图。覆盖误差应用服务器712包括但不限于经由互连806通信的中央处理单元(cpu)802、网络接口804、存储器820及存储装置830。覆盖误差应用服务器712也可包括连接i/o装置810(例如,键盘、视频、鼠标、音频、触摸屏等)的i/o装置接口808。覆盖误差应用服务器712可进一步包括网络接口804,网络接口804经构造以经由通信网络706传输数据。
[0050]
cpu 802检索并执行存储在存储器820中的编程指令,并且通常控制和协调其它系统部件的操作。类似地,cpu 802存储并检索驻留在存储器820中的应用数据。所包括的cpu 802表示单个cpu、多个cpu、具有多个处理核心的单个cpu和类似形式。互连806用于在cpu 802、i/o装置接口808、存储装置830、网络接口804和存储器820之间传输编程指令和应用数据。
[0051]
通常包括的存储器820表示随机存取存储器,并且在操作中,存储软件应用和数据以供cpu 802使用。尽管图示为单个单元,存储装置830可为经构造以存储非易失性数据的固定和/或可移除的存储装置的组合,诸如固定磁盘驱动器、软盘驱动器、硬盘驱动器、闪存存储驱动器、磁带驱动器、可移除存储卡、cd-rom、dvd-rom、蓝光、hd-dvd、光学存储、网络附属存储(nas)、云存储或存储局域网络(san)。
[0052]
存储器820可存储用于执行应用平台826的指令和逻辑,应用平台826可包括覆盖误差软件828。存储装置830可包括数据库832,数据库832经构造以存储数据834和相关联的应用平台内容836。数据库832可为任何类型的存储装置。
[0053]
网络计算机是可以与本文提供的公开内容结合使用的另一类型的计算机系统。网络计算机通常不包括硬盘或其它大容量存储装置,并且可执行程序从网络连接加载到存储器820中以供cpu 802执行。典型的计算机系统将通常至少包括处理器、存储器和将存储器耦接到处理器的互连。
[0054]
图7示出控制器702,控制器702用于访问覆盖误差应用服务器712并且检索或显示与应用平台826相关联的数据。控制器702可包括但不限于中央处理单元(cpu)902、网络接口904、互连906、存储器920、存储装置930和支持电路940。控制器702也可包括将i/o装置910(例如,键盘、显示器、触摸屏和鼠标装置)连接到控制器702的i/o装置接口908。
[0055]
如同cpu 802,所包括的cpu 902表示单个cpu、多个cpu、具有多个处理核心的单个cpu等,并且通常包括的存储器920表示随机存取存储器。互连906可用于在cpu 902、i/o装
置接口908、存储装置930、网络接口904和存储器920之间传输编程指令和应用数据。网络接口904可经构造以经由通信网络706传输数据,例如,从表面对准应用服务器712传递内容。存储装置930,诸如硬盘驱动器或固态存储驱动器(solid-state storage drive,ssd),可存储非易失性数据。存储装置930可含有数据库931。数据库931可含有数据932和其它内容934。在一些实施方式中,数据库931可进一步包括图像处理单元936。图像处理单元可包括数据938和/或控制逻辑939。说明性地,存储器920可包括应用接口922,应用接口922本身可显示软件指令924和/或存储或显示数据926。应用接口922可提供一个或多个软件应用,所述软件应用允许控制器702访问由表面对准应用服务器712托管的数据和其它内容。
[0056]
控制器702可耦接到处理设备160、平台130和编码器126中的一个或多个或与其通信。处理设备160和平台130可向控制器702提供关于基板处理和基板对准的信息。例如,处理设备160可向控制器702提供信息来提醒控制器基板处理已经完成。编码器126可向控制器702提供位置信息,并且随后使用位置信息来控制平台130和处理设备160。
[0057]
控制器702可包括中央处理单元(cpu)902、存储器820和支持电路940(或i/o 908)。cpu 902可为在工业环境中用于控制各种工艺和硬件(例如,图案发生器、电机和其它硬件)和监控工艺(例如,处理时间和基板位置)的任何形式的计算机处理器中的一个。如图7所示的存储器920连接到cpu 902,并且可为容易获得的存储器中的一个或多个,诸如随机存取存储器(ram)、只读存储器(rom)、软盘、硬盘或任何其它形式的数字存储装置(本地或远程)。软件指令和数据可以在存储器内编码和存储以用于指示cpu 902。支持电路940也连接到cpu 902用于以常规方式支持处理器。支持电路940可包括常见高速缓存942、电源944、时钟电路946、输入/输出电路系统948、子系统950和类似电路。可由控制器702读取的程序(或计算机指令)确定可在基板上执行哪些任务。程序可为可由控制器702读取的软件并且可包括代码来监控和控制例如处理时间和基板位置。
[0058]
然而,应记住,所有这些和类似术语与适当的物理量相关联,并且仅为应用到这些量的方便标记。如从以下论述显而易见,除非另外具体说明,将了解,在整个说明中,采用术语诸如“处理(processing)”或“计算(computing)”或“运算(calculating)”或“确定(determining)”或“显示(displaying)”或类似术语的论述是指计算机系统、或类似电子计算装置的动作和处理,所述计算机系统或类似电子计算装置将在计算机系统的寄存器和存储器内表示为物理(电子)量的数据操纵和转换为在计算机系统存储器或寄存器或其它此种信息存储、传输或显示装置内类似地表示为物理量的其它数据。
[0059]
本示例也涉及一种用于执行本文的操作的设备。此设备可出于所需目的被具体地构造,或所述设备可包括由在计算机中存储的计算机程序选择性激活或重新构造的通用计算机。此计算机程序可存储在计算机可读存储介质中,诸如但不限于只读存储器(rom)、随机存取存储器(ram)、eprom、eeprom、闪存存储器、磁性或光学卡、任何类型的盘(包括软盘、光盘、cr-rom、和磁光盘)、或适用于存储电子指令的任何类型的介质,并且各者耦接到计算机系统互连。
[0060]
本文提供的算法和显示并不是固有地与任何特定的计算机或其它设备相关。各种通用系统可与根据本文教示的程序一起使用,或可证明构造更专用的设备来执行所需方法操作可能是方便的。各种这些系统的结构将从以上描述显而易见。此外,本示例不参考任何特定编程语言来描述,并且各个示例可因此使用各种编程语言实现。
[0061]
如本文更详细描述,本公开内容的实施方式提供了软件应用,通过所述软件应用,通过在禁止角度处抖动那些特征的边缘来在禁止角度处校正曝光多边形的线波缺陷,从而在制造工艺中的无掩模光刻图案化期间降低边缘放置误差。
[0062]
在一个实施方式中,公开了用于响应于总覆盖区域来调整曝光参数的方法1000。方法1000可由如前文在图7中图示并且关于图7论述的控制器702执行。cpu 902被编程以执行在存储器820中存储的覆盖误差软件828,覆盖误差软件828实现方法1000以用于下文结合图8描述的响应于总覆盖区域来调整曝光参数。
[0063]
图8示意性示出了用于如图9所示的响应于总覆盖区域来调整曝光参数的方法1000的操作。方法1000通常涉及确定沉积在基板上的第一层的总覆盖误差并且响应于总覆盖误差来调整曝光参数。在一层与覆盖前一层的下一层之间,一层和下一层的独立图案必须对准。然而,由于多个覆盖层中的图案和材料差异,在层之间的膜应力和/或外形变化(或图案相关差异)是不可避免的。在形成在基板上的层之间产生的膜应力将致使基板变形,这影响光刻图案化工艺的结果,进而可以导致在基板上形成的半导体器件的器件产量问题。器件结构的覆盖误差可源自不同的误差源。在本领域中常见的误差源中的一个源为由膜应力、基板曲率和类似因素导致的基板膜层变形。基板上的器件结构的膜应力、基板曲率、基板变形或表面外形变化也可导致从一层到下一层形成的光刻图案的位移/错位,这可对器件产量结果不利和/或导致器件性能变化。作为理想矩形形状开始可导致“枕形”形状,其中基板在各个方向上被拉动,从而无法再维持理想矩形形状。当存在基板翘曲时,原始中心c可偏移至中心c
’
。因此,关于中心c的给定点(x,y)可对应于点(x',y')。由此,为了在第一层的顶部上对准后续层,系统需要对总覆盖误差进行计数。
[0064]
方法1000在操作1002处开始。在操作1002处,将基板1101的表面1102被划分为一个或多个区段s
k
。一个或多个区段s
k
对应于系统100中的一个或多个图像投影系统301。例如,给定n个图像投影系统301,那么将基板1101划分为n个区段s
n
。在本示例中,将基板1101划分为四个区段s
1-s
4
,其对应于二乘二的图像投影系统301布置。将基板1101划分为一个或多个区段s
k
允许覆盖误差的更准确读数。这是因为单个最佳拟合线可能不满足基板上的复杂失真图案。划分基板允许将最佳拟合线应用到较小失真区域,因此提供总失真图案的更准确读数。当将基板1101划分为区段时,确定每个区段的原点(0,0)。这允许系统在后续计算中更容易地确定每个区段s
1-s
4
的中心c。
[0065]
在操作1004处,确定基板上沉积的第一层的总覆盖误差。确定总覆盖误差包括确定每个区段s
k
的区段覆盖误差(子操作1008)和确定其中两个或多个区段s
k
重叠的区域的重叠覆盖误差(子操作1010)。
[0066]
在子操作1008处,确定每个区段s
k
的区段覆盖误差。通过第一次扫描沉积在基板上的第一层的顶表面来确定区段覆盖误差,进而确定在每个区段s
k
中的失真量。失真图案与趋势线拟合以确定坐标偏移。例如,给定具有线性图案的失真,线性趋势线可用于确定如何调整后续曝光的处理参数。在另一示例中,给定具有弯曲失真的失真,多项式趋势线可用于确定如何调整后续曝光的处理参数。通常,趋势线表示多项式,所述多项式将原始处理参数中的每个原始坐标(x,y)转移到修改的处理参数中的修改坐标(x',y')以解决覆盖误差。通常,这可表示为:
[0067][0068][0069]
其中等式1表示在x方向上的坐标偏移,并且等式2表示在y方向上的坐标偏移。等式1和2被划分为三个元素:原点(x或y)、和并且s
k
(x,y)表示给定区段k,其中s
k
(x,y)为分段函数,并且可表示为:
[0070][0071]
如果点不在区段s
k
中,分段函数s
k
(x,y)迫使为零。因此,等式3确保仅有相应区段中的点通过表示所述区段的最佳拟合线的多项式进行偏移。其它区段可呈现失真图案,其中使用不同的最佳拟合线。由此,每个区段的等式1和2可能不相等。
[0072]
在子操作1010处,确定重叠覆盖误差。确定其中两个或多个区段s
k
重叠的那些区域中的重叠覆盖误差。如图9所示,重叠区域oa
1-oa
5
为其中两个或多个区段s
k
重叠的区域。为了确定给定重叠区域oa
k
中的覆盖误差,对导致重叠区域oa
k
的区段的区段覆盖误差求平均。x方向上的偏移可由等式4表示,并且y方向中的偏移可为等式5。
[0073][0074][0075][0076]
重叠区域由oa
k
(x,y)表示,其中oa
k
(x,y)为由下文等式6表示的分段等式。
[0077][0078]
在等式6中,如果点(x,y)为在至少两个区段s
v
、s
w
(其中s
v
,s
w
∈s
k
)的交叉中的元素,那么oa
k
(x,y)表示函数w
k
(x,y)。如果点(x,y)在重叠区域中,那么将函数w
k
(x,y)代入等式4和5中用于oa
k
(x,y),其中w
k
(x,y)表示为:
[0079][0080]
其中(cx
k
,cy
k
)限定每个区段s
k
的中心。
[0081]
当在每个区段s
k
以及所有重叠区域oa
k
中计算每个点的x和y偏移之后,在操作1006处,响应于在操作1010中确定的总覆盖误差来调整曝光参数。针对每个区段s
k
中的每个点,每个点(x,y)根据等式1和2偏移到(x',y')。针对每个重叠区域oa
k
中的每个点,每个点(x,y)根据等式4和5偏移到(x',y')。通过考虑重叠区域oa
k
,方法1000允许在相邻区段s
k
之间的平滑过渡。所述平滑过渡减轻了由于第一层中的相邻区段s
k
之间的突变而导致的覆盖误差。
[0082]
虽然前述内容针对本文描述的实施方式,但是在不脱离其基本范围的情况下,可设计出其它和进一步实施方式。例如,本公开内容的方面可以在硬件或软件或硬件和软件的组合中实现。本文描述的一个实施方式可实现为与计算机系统一起使用的程序产品。所述程序产品的(多个)程序限定实施方式(包括本文描述的方法)的功能并且可以包含在各种计算机可读存储介质上。说明性计算机可读存储介质包括但不限于:(i)其上永久存储信息的不可写存储介质(例如,在计算机内的只读存储器装置,诸如可由cd-rom驱动器读出的cd-rom盘、闪存存储器、rom芯片或任何类型的固态非易失性半导体存储器);和(ii)其上存储可更改的信息的可写存储介质(例如,在软盘驱动器内的软盘或硬盘驱动器或任何类型的固态随机存取半导体存储器)。当携带涉及所公开的实施方式的功能的计算机可读指令时,这种计算机可读存储介质为本公开内容的实施方式。
[0083]
本领域的技术人员将了解,前述示例为示例性的,而非限制性的。预期的是,在阅读本说明书和研究随附附图之后所有置换形式、增强形式、等效形式和它们的改进形式都包括在本公开内容的真实精神和范围内对本领域的技术人员而言是显而易见的。由此,随附的权利要求书意欲包括落入这些教导的真实精神和范围内的所有这些修改形式、置换形式和等效形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1