无轴向位移的压电二维快反镜及驱动和偏转角度测量方法与流程
[0001]
本发明属于光束控制领域,具体涉及一种无轴向位移的压电二维快反镜及驱动和偏转角度测量方法。
背景技术:
[0002]
压电快反镜机构结构紧凑、体积小可实现光束的高精度、高带宽控制,在精密加工、生物工程、激光通信等领域有广泛应用。目前国内外主流的压电快反镜机构主要是以差分驱动方式工作,即在偏转之前,快反镜机构内部的压电堆总体伸长到中间某一个位置,表现为镜面整体提沿轴向抬高。偏转镜沿轴向的移动往往会改变原有光路的设计。通过控制电压在中间点电压上下变化,实现镜面在中间点附近偏转。以德国pi二维偏转机构为例,压电快反镜在差分驱动时,需要在驱动轴下两个压电陶瓷上施加三种电压,即0v和100v固定电压以及x轴控制输入电压和y轴控制输入电压。供电种类较多,而且往往对上电顺序有比较的严格要求,否则会容易造成压电堆的损伤。现有的快反镜机机构采用应变测量的方式测量快反镜的偏角,应变电桥信号线普遍较短,长距离传输时测量噪声会明显增大导致控制精度会明显降低。
技术实现要素:
[0003]
为了克服上述现有技术存在的问题,本发明目的在于提供一种无轴向位移的压电二维快反镜及驱动和偏转角度测量方法,该压电二维快反镜具有工作时无轴向位移、驱动电压形式安全简单,测量信号可实现较远距离传输的特点。
[0004]
为了达到上述目的,本发明采用如下技术方案:
[0005]
一种无轴向位移的压电二维快反镜,包括反射镜片1,用于安装反射镜片的镜托2,第一位移放大机构3,第一表面贴应变片的压电堆4,第二位移放大机构6,第二表面贴应变片的压电堆5,第三位移放大机构9,第三表面贴应变片的压电堆10,第四位移放大机构12,第四表面贴应变片的压电堆11,安装底座7,应变信号处理电路8;
[0006]
所述第一位移放大机构3,第二位移放大机构6,第三位移放大机构9,第四位移放大机构12安装在安装底座7上,相邻90
°
安装;应变信号处理电路8安装在安装底座7上表面中部;
[0007]
所述第一位移放大机构3,第二位移放大机构6,第三位移放大机构9,第四位移放大机构12顶部为双向柔性导向的虎克铰;第一位移放大机构3和第二位移放大机构6近似为菱形结构。第三位移放大机构9和第四位移放大机构12近似为六边形且上下两个顶点内凹;
[0008]
所述第一表面贴应变片的压电堆4安装在第一位移放大机构3内,沿长轴方向布置;第二表面贴应变片的压电堆5安装在第二位移放大机构6内,沿长轴方向布置;第三表面贴应变片的压电堆10安装在第三位移放大机构9内,沿长轴方向布置;第四表面贴应变片的压电堆11安装在第四位移放大机构12内,沿长轴方向布置;所述第一位移放大机构3和第二位移放大机构6结构形式和工作原理相同,相邻安装;表现为当压电堆通电且电压逐渐升高
时,压电堆伸长并驱动位移放大机构沿长轴方向伸长,同时在位移放大机构的短轴方向,即安装方向表现为数倍放大的位移的收缩;第三位移放大机构9,第四位移放大机构12结构形式和工作原理相同,相邻安装;表现为当压电堆通电且电压逐渐升高时,压电堆伸长并驱动位移放大机构沿长轴方向伸长,同时在位移放大机构的短轴方向,即安装方向表现为数倍放大的位移的伸长;
[0009]
所述第一表面贴应变片的压电堆4和第一位移放大机构3组成第一位移作动器,第二表面贴应变片的压电堆5和第二位移放大机构6组成第二位移作动器,第三表面贴应变片的压电堆10和第三位移放大机构9组成第三位移作动器,第四表面贴应变片的压电堆11和第四位移放大机构12组成第四位移作动器;
[0010]
所述第一表面贴应变片的压电堆4和第一位移放大机构3组成的第一位移作动器与第三表面贴应变片的压电堆10和第三位移放大机构9组成第三位移作动器相对安装,组成一个偏转对;第二表面贴应变片的压电堆5和第二位移放大机构6组成的第二位移作动器与第四表面贴应变片的压电堆11和第四位移放大机构12组成的第四位移作动器相对安装,组成一个偏转对;
[0011]
所述镜托2安装在第一位移放大机构3、第二位移放大机构6、第三位移放大机构9和第四位移放大机构12之上,通过虎克铰与作动器相连;反射镜片1安装在镜拖2上,反射镜片1和镜拖2同轴心。
[0012]
所述四个位移放大机构放大倍率相同,即在相同的驱动电压下,四个位移作动器的输出位移大小相等,且两种不同结构形式和工作原理的位移作动器输出位移方向相反。
[0013]
所述第一位移作动器和第三位移作动器相对安装,当第一位移放大机构3和第三位移放大机构9内的第一表面贴应变片的压电堆4和第三表面贴应变片的压电堆10施加同样的电压时,第一位位移作动器输出位移与第三位移作动器输出位移大小相等方向相反;由于位移放大机构与镜托柔性铰链的连接和导向作用,当第一位移作动器和第三位移作动器时间同样大小电压时,位移作动器带动镜托2和反射镜片1实现绕x轴偏转;
[0014]
所述第二位移作动器和第四位移作动器相对安装,当第二位移放大机构和第四位移放大机构内的第二表面贴应变片的压电堆5和第四表面贴应变片的压电堆11施加同样的电压时,第二位位移作动器输出位移与第四位移作动器输出位移大小相等方向相反;由于位移放大机构与镜托柔性铰链的连接和导向作用,当第二位移作动器和第四位移作动器时间同样大小电压时,位移作动器带动镜托2和反射镜片1实现绕y轴偏转;
[0015]
由于柔性铰链设计成的虎克铰能够实现x轴和y轴工作的机械解耦,当x轴和y轴同时工作时,实现镜面的二维偏转;
[0016]
所述二维快反镜,x轴或y轴单轴偏转时,只需要一个驱动电压正极和一个驱动电压负极,能够实现单轴的偏转。
[0017]
二维偏转时,x轴和y轴共用电压负极,即公共地,而驱动电压正极独立;因此,二维偏转只需要三个驱动电压信号即x轴驱动电压正极、y轴驱动电压正极、公共地;由于压电堆的正极接驱动电压正极,压电堆的负极接公共地;在正常工作电压范围内,压电堆上的电压始终在允许的工作范围内;不存在因为各电压上电顺序不一致,压电堆施加负电压导致损伤的问题。
[0018]
所述二维快反镜的初始位置为零点,即不通电状态或者通电电压为零的状态;随
着驱动电压的增大,偏转角度逐渐增加;如果某一轴下距离二维快反镜中心距为l输出位移为δx,那么二维快反镜的偏转角度为θ=arctan(2δx/l);偏转过程中,偏转的中心点保持变,无轴向位移。
[0019]
所述二维快反镜偏转角度的测量,通过利用单轴下相对的压电堆上粘接的应变片来组成应变电桥,通过应变测量间接得出二维快反镜偏转角度;为了实现二维快反镜测量桥路信号高精度长距离传输,在二维快反镜内部集成一块应变信号处理电路8,将信号以(-5v,5v)(-10v,10v)或者通过ad转换器件以lvds或rs422差分线电平将数据传出。
[0020]
应变信号处理电路8核心为应变信号调理放大电路及模拟信号滤波电路;滤波后的信号通过双通道ad转换电路转换成数字量,并通过lvds或者rs422差分电平输出;同时为了方便与其它设备兼容将模拟信号调理至(-5v,5v)和(-10v,10v)范围内输出;压电堆位移输出和所在位移作动器的输出位移是线性关系;通过压电堆表面的电阻应变片能够测得压电堆的轴向伸长;压电堆的变形和压电堆所贴电阻应变片阻值的变化是线性关系;将每个轴下的一对位移作动器的应变片组成应变全桥,通过测量桥路输出放大后的电压能够间接反应快反镜对应轴的偏转角度;双轴的应变测量桥路独立工作,能够同时反应快反镜二维偏转角度;通过标准偏角传感器标定应变测量桥路输出后,能够通过应变信号处理电路测量快反镜二维偏转角度。
[0021]
本发明利用逆压电效应,以压电堆为驱动元件,采用了两种位移放大机构,以及双轴解耦的柔性铰链虎克铰,驱动镜拖带着镜面偏转。在压电堆表面粘贴应变片,通过应变电桥输出间接测量二维偏转的角度,内嵌电路支持远距离信号传输。两种位移放大机构内嵌同规格压电堆,工作方向为短边方向。其中一种是通电后随着电压升高,工作方向位移增大,另一种则在工作方向上位移减小。通过结构设计,一个电压可实现两个位移作动器同时等量收缩和伸长。两种位移放大机构相对安装在同一个偏转轴下,两压电堆并联,随着电压从零增大,所驱动的反射镜从零开始,偏角逐渐增大且镜面在偏转过程中无轴向位移。和现有技术相比较,本发明具有如下优点:
[0022]
1)、结构紧凑,初态为零位,偏转时镜面无轴向位移。
[0023]
2)、含位移放大机构,输出行程大,双轴结构上解耦。
[0024]
3)、驱动形式简单,双轴独立驱动,只需要三个驱动信号即可实现二维偏转。
[0025]
4)、采用应变传感测量偏转角度,内部集成应变信号调理电路,接口丰富,可输出多种信号,便于传感器信号长距离传输。
附图说明
[0026]
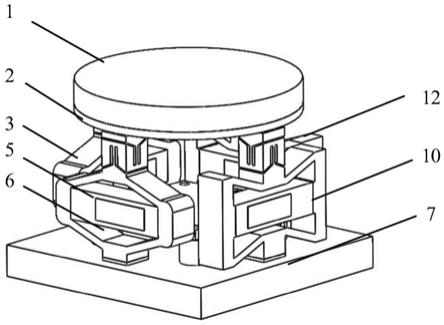
图1为本发明二维快反镜结构图。
[0027]
图2为本发明二维快反镜分解图。
[0028]
图3a和图3b分别为本发明两种位移放大机构工作示意图。
[0029]
图4为偏转角度计算示意图。
[0030]
图5为信号处理电路原理框图。
具体实施方式
[0031]
下面结合附图和具体实施方式,对本发明作进一步详细说明:
[0032]
如图1和图2所示,本发明一种无轴向位移的压电二维快反镜,包括反射镜片1,用于安装反射镜片的镜托2,第一位移放大机构3,第一表面贴应变片的压电堆4,第二位移放大机构6,第二表面贴应变片的压电堆5,第三位移放大机构9,第三表面贴应变片的压电堆10,第四位移放大机构12,第四表面贴应变片的压电堆11,安装底座7,应变信号处理电路8;
[0033]
所述第一位移放大机构3,第二位移放大机构6,第三位移放大机构9,第四位移放大机构12安装在安装底板7上,相邻90
°
安装;应变信号处理电路8安装在安装底板7上表面中部;
[0034]
所述第一位移放大机构3,第二位移放大机构6,第三位移放大机构9,第四位移放大机构12顶部为双向柔性导向的虎克铰;
[0035]
所述第一表面贴应变片的压电堆4安装在第一位移放大机构3内,沿长轴方向布置;第二表面贴应变片的压电堆5安装在第二位移放大机构6内,沿长轴方向布置;第一位移放大机构3和第二位移放大机构6为六边形第三表面贴应变片的压电堆10安装在第三位移放大机构9内,沿长轴方向布置;第四表面贴应变片的压电堆11安装在第四位移放大机构12内,沿长轴方向布置;第三位移放大机构9和第四位移放大机构12为六边形且上下两个顶点内凹;
[0036]
所述第一位移放大机构3和第二位移放大机构6结构形式和工作原理相同,相邻安装;如图3a所示,表现为当压电堆通电且电压逐渐升高时,压电堆伸长并驱动位移放大机构沿长轴方向伸长,同时在位移放大机构的短轴方向,即安装方向表现为数倍放大的位移的收缩;第三位移放大机构9,第四位移放大机构12结构形式和工作原理相同,相邻安装;如图3a所示,表现为当压电堆通电且电压逐渐升高时,压电堆伸长并驱动位移放大机构沿长轴方向伸长,同时在位移放大机构的短轴方向,即安装方向表现为数倍放大的位移的伸长;
[0037]
所述第一表面贴应变片的压电堆4和第一位移放大机构3组成第一位移作动器,第二表面贴应变片的压电堆5和第二位移放大机构6组成第二位移作动器,第三表面贴应变片的压电堆10和第三位移放大机构9组成第三位移作动器,第四表面贴应变片的压电堆11和第四位移放大机构12组成第四位移作动器;
[0038]
所述第一表面贴应变片的压电堆4和第一位移放大机构3组成的第一位移作动器与第三表面贴应变片的压电堆10和第三位移放大机构9组成第三位移作动器相对安装,组成一个偏转对;第二表面贴应变片的压电堆5和第二位移放大机构6组成的第二位移作动器与第四表面贴应变片的压电堆11和第四位移放大机构12组成的第四位移作动器相对安装,组成一个偏转对;
[0039]
所述镜托2安装在第一位移放大机构3、第二位移放大机构6、第三位移放大机构9和第四位移放大机构12之上,通过虎克铰与作动器相连;反射镜片1安装在镜拖2上,反射镜片1和镜拖2同轴心。
[0040]
所述四个位移放大机构放大倍率相同,即在相同的驱动电压下,四个位移作动器的输出位移大小相等,且两种不同结构形式和工作原理的位移作动器输出位移方向相反。
[0041]
所述第一位移作动器和第三位移作动器相对安装,当第一位移放大机构3和第三位移放大机构9内的第一表面贴应变片的压电堆4和第三表面贴应变片的压电堆10施加同样的电压时,第一位位移作动器输出位移与第三位移作动器输出位移大小相等方向相反;由于位移放大机构与镜托柔性铰链的连接和导向作用,当第一位移作动器和第三位移作动
器时间同样大小电压时,位移作动器带动镜托2和反射镜片1实现绕x轴偏转;
[0042]
所述第二位移作动器和第四位移作动器相对安装,当第二位移放大机构和第四位移放大机构内的第二表面贴应变片的压电堆5和第四表面贴应变片的压电堆11施加同样的电压时,第二位位移作动器输出位移与第四位移作动器输出位移大小相等方向相反;由于位移放大机构与镜托柔性铰链的连接和导向作用,当第二位移作动器和第四位移作动器时间同样大小电压时,位移作动器带动镜托2和反射镜片1实现绕y轴偏转;由于柔性铰链设计成的虎克铰能够实现x轴和y轴工作的机械解耦,当x轴和y轴同时工作时,实现镜面的二维偏转;所述二维快反镜,x轴或y轴单轴偏转时,只需要一个驱动电压正极和一个驱动电压负极,能够实现单轴的偏转。
[0043]
二维偏转时,x轴和y轴共用电压负极,即公共地,而驱动电压正极独立;因此,二维偏转只需要三个驱动电压信号即x轴驱动电压正极、y轴驱动电压正极、公共地;由于压电堆的正极接驱动电压正极,压电堆的负极接公共地;在正常工作电压范围内,压电堆上的电压始终在允许的工作范围内;不存在因为各电压上电顺序不一致,压电堆施加负电压导致损伤的问题。
[0044]
所述二维快反镜的初始位置为零点,即不通电状态或者通电电压为零的状态;随着驱动电压的增大,偏转角度逐渐增加;如果某一轴下距离二维快反镜中心距为l输出位移为δx,如图4所示,那么二维快反镜的偏转角度为θ=arctan(2δx/l);偏转过程中,偏转的中心点保持变,无轴向位移。
[0045]
所述二维快反镜偏转角度的测量,通过利用单轴下相对的压电堆上粘接的应变片来组成应变电桥,通过应变测量间接得出二维快反镜偏转角度;为了实现二维快反镜测量桥路信号高精度长距离传输,在二维快反镜内部集成一块应变信号处理电路8,将信号以(-5v,5v)(-10v,10v)或者通过ad转换器件以lvds或rs422差分线电平将数据传出。
[0046]
如图5所示,应变信号处理电路8核心为应变信号调理放大电路及模拟信号滤波电路;滤波后的信号通过双通道ad转换电路转换成数字量,并通过lvds或者rs422差分电平输出;同时为了方便与其它设备兼容将模拟信号调理至(-5v,5v)和(-10v,10v)范围内输出;压电堆位移输出和所在位移作动器的输出位移是线性关系;通过压电堆表面的电阻应变片能够测得压电堆的轴向伸长;压电堆的变形和压电堆所贴电阻应变片阻值的变化是线性关系;将每个轴下的一对位移作动器的应变片组成应变全桥,通过测量桥路输出放大后的电压能够间接反应快反镜对应轴的偏转角度;双轴的应变测量桥路独立工作,能够同时反应快反镜二维偏转角度;通过标准偏角传感器标定应变测量桥路输出后,能够通过应变信号处理电路测量快反镜二维偏转角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1