一种调整成像镜头安装角度的辅助装置及调整方法与流程
1.本发明涉及成像镜头调整技术领域,具体涉及一种调整成像镜头安装角度的辅助装置及调整方法。
背景技术:
2.在倾斜式扫描的直接成像系统中,成像镜头的安装角度θ'需要保持在一个有效角度范围a内,即a=[θ
‑
ε,θ+ε],ε>0,其中,θ是理想的装配角度,ε为最大允许的装配误差。如果装配误差e满足|e|>ε,则装配不合格,一般地ε<0.003(deg)。装配精度要求越高,装配越困难。
[0003]
现在比较常用的方法是:
[0004]
1、准备运动系统x、y、z和角度标定相机。其中,角度标定相机与成像镜头可相对在x、y方向移动,z用于改变成像镜头与角度标定相机之间的距离,使的成像镜头的成像更好的落在角度标定相机的传感器面上。
[0005]
2、把成像镜头初步预装好,再利用运动系统驱动角度标定相机去标定成像镜头的安装角度θ',标定的安装角度θ'由计算机计算得出;
[0006]
3、人工判断安装角度θ',如果不在有效角度范围a内,再通过人工微调成像镜头的安装角度。
[0007]
4、再用运动系统驱动角度标定相机去标定成像镜头的安装角度θ',人工再次判读安装角度θ'是否属于有效角度范围a。
[0008]
5、不断的重复2~3,直至安装角度属于有效角度范围a。
[0009]
上述工作过程,工作效率低下,并且在紧固成像镜θ'头到成像镜头座时,可能会发生角度的偏转,并且无法实时监测。
技术实现要素:
[0010]
本发明提出的一种调整成像镜头安装角度的辅助装置及调整方法,可解决上述技术问题。
[0011]
为实现上述目的,本发明采用了以下技术方案:
[0012]
一种调整成像镜头安装角度的辅助装置,包括两个工业相机,工业相机一、工业相机二、底座、两个平面镜,平面镜一、平面镜二,平面镜座;
[0013]
底座上中心对齐依次安装的是工业相机一,平面镜座和工业相机二;
[0014]
平面镜座安装在底座的中间位置,工业相机一和工业相机二以平面镜座的中心相向对称安装,用于接收由平面镜一和平面镜二反射而来的水平光线;
[0015]
平面镜座的两端有两个45度切面,用于安装两个平面镜,两个平面镜分别安装在平面镜座的45度切面上,用于接收成像镜头机构中的成像镜头垂直向下的出射光线;
[0016]
成像镜头的出射光线经两个平面镜反射后,以水平方向分别反射到两侧的工业相机的视场内。
[0017]
另一方面,本发明还公开一种调整成像镜头安装角度的辅助装置,包括两个工业相机、底座和反射棱台;
[0018]
底座上单方向依次安装的是工业相机,反射棱台和工业相机;
[0019]
反射棱台安装在底座的中间位置,工业相机一和工业相机二以反射棱台的中心相向对称安装,用于接收由反光膜反射而来的水平光线;
[0020]
反射棱台的两端有两个45度切面,上面镀有反光膜,用于接收成像镜头垂直向下的出射光线,成像镜头的出射光线经两个反光膜反射后,以水平方向分别反射到两侧的工业相机的视场内。
[0021]
再一方面,本发明还公开一种调整成像镜头安装角度的辅助装置,包括两个工业相机、底座、两个三角棱镜;
[0022]
底座上单方向依次安装的是工业相机一,两个三角棱镜,工业相机二;
[0023]
两个工业相机和两个三角棱镜以底座为中心对称安装;
[0024]
两个工业相机用于接收由三角棱镜全反射而来的水平光线。
[0025]
同时,本发明还公开一种调整成像镜头安装角度的方法,基于上述调整成像镜头安装角度的辅助装置,包括以下步骤:
[0026]
s100、待调整成像镜头安装角度的整机的硬件已经就绪;
[0027]
s200、通过角度标定相机进行一次成像镜头的安装角度标定,得出成像镜头的当前安装角度θ';
[0028]
s300、将成像镜头角度测量装置水平固定在运动平台上,装置的长边方向与直接成像系统的扫描方向垂直;
[0029]
s400、驱动运动系统移动成像镜头角度测量装置到成像镜头的正下方,即成像系统成像左右两部分可分别落在左右工业相机的成像面上,且清晰成像;
[0030]
s500、在空间光调制器中投放带有左右对称的两个标记的单张图像,该图像的两个标记点在两个相机分别清晰成像,使用图像处理方法计算出两个标记在两个工业相机中的位置,分别记为:a1(x
11
,y
11
),b'1(x'
12
,y'
12
),对b'1(x'
12
,y'
12
)使用事先设定的相机位置关系计算算法计算得出b1(x
12
,y
12
);此时初次安装角度为θ';
[0031]
s600、通过计算机模块获取当前成像镜头的已标定的角度;
[0032]
s700、微调成像镜头,通过计算机模块实时计算出标记在工业相机的成像的两个标记坐标为分别记为:a2(x
21
,y
21
),b'2(x'
22
,y'
22
),对b'2(x'
22
,y'
22
)使用事先设定的相机位置关系计算算法计算得出b2(x
22
,y
22
);并且实时计算出当前偏转角度与初次安装角度θ'的角度偏差δ;
[0033]
当前的安装角度为:θ=θ'+δ;
[0034]
s800、通过计算机模块判断当前的安装角度θ是否在有效角度范围a内,如果在有效角度范围a内,则提示操作人员已经满足要求,进行下一步操作;如果没有满足要求,根据当前的安装角度θ的大小,进行相反方向的角度调整,即角度偏大,向更小的角度方向调整,角度偏小,向更大的角度方向调整。
[0035]
进一步的,s800中下一步操作包括:
[0036]
紧固成像镜头,并实时监测安装角度的变化,如果角度超过有效角度范围a,在发前紧固的程度下,重新进行微调,直至满足安装角度的要求,再继续紧固工作。
[0037]
进一步的,所述角度偏差δ的计算步骤如下:
[0038]
成像系统投放包含两个用于标定的标记的图像,在工业相机中成像;
[0039]
使用图像处理方法计算出两个标记在工业相机中的位置,分别记为:a1(x
11
,y
11
),b1(x
12
,y
12
),此时初次安装角度为θ';
[0040]
微调成像镜头,此时因为角度的变化,计算机可实时计算出标记点在工业相机的成像的两个标记坐标为a2(x
21
,y
21
),b2(x
22
,y
22
);
[0041]
令向量:
[0042][0043][0044][0045]
得
[0046]
进一步的,参考图7,所述相机间位置关系计算算法如下:
[0047]
以相机一(431a)的中心点为原心,以相机一(431a)相机的坐标系方向构建世界坐标系,在该世界坐标系下标定出相机二(431b)的相机中心在世界坐标系中的位置b(t
x
,t
y
),以及相机431b坐标系在世界坐标系中的旋转角度α,则在相机431b中任意像素坐标p
c
(x0,y0)在世界坐标系中的坐标为p
w
(x1,y1),上述坐标均以像素为单位,两者之间的关系为:
[0048][0049]
令旋转矩阵其中,相机二(431b)坐标系在世界坐标系中的旋转角度α;
[0050]
世界坐标系的平移矩阵为:其中,世界坐标系下标定出相机二(431b)的相机中心在世界坐标系中的位置b(t
x
,t
y
);
[0051]
相机中心坐标平移矩阵为:其中,相机中心在相机坐标系中的位置c(c
x
,c
y
),
[0052]
故有:
[0053]
得出:
[0054]
则公式1即为相机间位置关系计算算法公式。
[0055]
由上述技术方案可知,通过本发明提供的调整成像镜头安装角度的辅助装置和调整方法,可实现在调整成像镜头的安装角度的同时,实时监测调整的安装角度是否已经满足要求,并且在紧固成像镜头的过程中,监测成像镜头的安装角度是否发生偏移出有效角度范围。使用本发明的成像镜头角度的装置和方法,使得成像镜头调整和安装过程简单快捷,省去了反复调整和标定的繁琐动作。
附图说明
[0056]
图1是本发明的成像镜头角度测量装置一的结构示意图;
[0057]
图2是本发明的成像镜头角度测量装置二的结构示意图;
[0058]
图3是本发明的成像镜头角度测量装置三的结构示意图;
[0059]
图4是本发明使用状态结构示意图;
[0060]
图5是本发明的相机坐标系与世界坐标系示意图;
[0061]
图6是相机误差分析模型;
[0062]
图7是垂直面相机光路转换为水平面后的相机关系模型图;
[0063]
图8相机成像分析原理图;
[0064]
图9是本发明相机标定算法示意图;
[0065]
图10是本发明角度偏差δ示意图;
[0066]
图11、图12是本发明的成像镜头安装角度的整机结构示意图。
具体实施方式
[0067]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
[0068]
本发明提供的调整成像镜头安装角度的辅助装置可以是三种结构:
[0069]
第一种,如图1所示;
[0070]
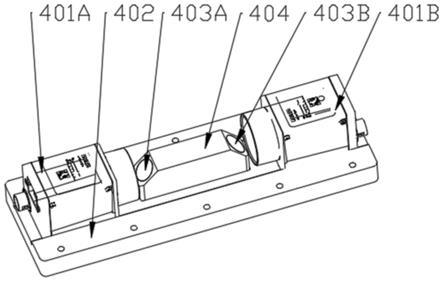
成像镜头角度测量装置一包括两个工业相机401a,401b、底座402、两个平面镜403a和403b、平面镜座404。
[0071]
底座402上直线依次安装的是工业相机401a,平面镜座404和工业相机401b。平面镜座404安装在底座402的中间位置,工业相机401a和工业相机401b以平面镜座404的中心相向对称安装,用于接收由平面镜403a、403b反射而来的水平光线。
[0072]
平面镜座404的两端有两个45度切面,用于安装两个平面镜403a、403b,两个平面镜403a、403b分别安装在平面镜座404的45度切面上,用于接收成像镜头垂直向下的出射光
线。成像镜头的出射光线经两个平面镜403a、403b反射后,以水平方向分别反射到两侧的工业相机401a,401b的视场内。
[0073]
第二种,如图2所示:
[0074]
成像镜头角度测量装置二包括两个工业相机411a,411b、底座412、两个反光膜413a、413b、平面镜座414。
[0075]
底座412上直线依次安装的是工业相机411a,平面镜座414和工业相机411b。平面镜座414安装在底座412的中间位置,工业相机411a和工业相机411b以平面镜座414的中心相向对称安装,用于接收由反光膜413a、413b反射而来的水平光线。
[0076]
平面镜座414的两端有两个45度切面,上面镀有反光膜413a、413b,用于接收成像镜头垂直向下的出射光线。成像镜头的出射光线经两个反光膜413a、413b反射后,以水平方向分别反射到两侧的工业相机411a,411b的视场内。
[0077]
第三种,如图3所示;
[0078]
成像镜头角度测量装置三包括两个工业相机421a、421b、底座422、两个三角棱镜423a、423b。
[0079]
底座422上直线依次安装的是工业相机421a,两个三角棱镜423a、423b,工业相机401b。两个工业相机421a、421b和两个三角棱镜423a、423b以底座422为中心对称安装。两个工业相机421a、421b用于接收由三角棱镜423a、423b全反射而来的水平光线。
[0080]
在使用时,本实施例所述的调整成像镜头安装角度的辅助装置安装在整机上,具体如图4所示,包括成像镜头机构2,所述成像镜头机构2固定在框架1上,把本实施例的上述成像镜头角度测量装置设置在成像镜头机构2下方的运动平台5上;成像镜头包括准直器、dmd和镜头。
[0081]
上述三种成像镜头角度测量装置的工作原理如下:
[0082]
如图5所示,以相机成像面建立世界坐标系,z轴垂直于成像面,x、y分别平行于成像面的x方向和y方向;因为相机坐标系与世界坐标系之间y轴是反方向的关系,以及在成像过程中,图像可能因为镜像等原因,旋转或翻转。这里均要求相机采像后进行必要的图像旋转和翻转,满足坐标系的定义要求。
[0083]
假定图像成像坐标如5所示。则存在5个误差:
[0084]
1)绕世界坐标轴x方向的转角引入的误差;
[0085]
2)绕世界坐标轴y方向的转角引入的误差;
[0086]
3)绕世界坐标轴z方向的转角引入的误差;
[0087]
4)沿世界坐标轴z方向前后平移引入的误差(增加微调机构,调整到焦面即可);
[0088]
5)沿世界坐标轴y方向上下平移引入的误差(增加微调机构,调整到焦面即可);
[0089]
以下具体说明:
[0090]
针对绕世界坐标轴x方向的转角引入的误差
[0091]
假如相机装配的时候,相机成像面绕x轴有个α角的旋转,示意图如6下:
[0092]
∵|bd|=|ab|
·
tanα,|cd|=|bd|sinα
[0093]
∵α
→
0,|cd|=|bd|sinα≈|ab|
·
α2[0094]
当误差限为d时,应有:|cd|≤d,故角度误差限的给定原则是:
[0095]
[0096]
实施例:如要求d≤0.001mm,相机成像面尺寸为:|ab|=2.7mm,那么相机的装配倾斜角度误差应满足:
[0097]
一般地,底座412上的相机安装面的平面度为0.01mm,相机安装面长度36mm,那么相机成像面绕x轴旋转角装配误差≤0.01/36rad≈0.016
°
,远小于α=1.1
°
,因此能够满足使用要求,即x方向的转角可忽略不计。
[0098]
针对绕世界坐标轴y方向的转角引入的误差
[0099]
假如相机装配的时候,相机成像面绕y轴有个α角的旋转,示意图如6下:
[0100]
∵|bd|=|ab|
·
tanα,|cd|=|bd|sinα
[0101]
∵α
→
0,|cd|=|bd|sinα≈|ab|
·
α2[0102]
当误差限为d时,应有:|cd|≤d,故角度误差限的给定原则是:
[0103][0104]
实施例:如要求d≤0.001mm,相机成像面尺寸为:|ab|=2.7mm,那么相机的装配倾斜角度误差应满足:
[0105]
一般地,底座412上的相机安装面的平面度为0.01mm,相机安装面长度36mm,那么相机成像面绕y轴旋转角装配误差≤0.01/36rad≈0.016
°
,远小于α=1.1
°
,因此能够满足使用要求,即y方向的转角可忽略不计。
[0106]
针对绕世界坐标轴z方向的转角引入的误差
[0107]
根据光路的特点,可以将相机理解成为直接成像的机构。
[0108]
如图7、图8及图9所示:
[0109]
以相机431a的中心点为原心,以相机431a相机的坐标系方向构建世界坐标系,在该世界坐标系下标定出相机431b的相机中心在世界坐标系中的位置b(t
x
,t
y
),以及相机431b坐标系在世界坐标系中的旋转角度α,则在相机431b中任意像素坐标p
c
(x0,y0)在世界坐标系中的坐标为p
w
(x1,y1),上述坐标均以像素为单位,两者之间的关系为:
[0110]
令旋转矩阵其中,相机431b坐标系在世界坐标系中的旋转角度α。
[0111]
世界坐标系的平移矩阵为:其中,世界坐标系下标定出相机431b的相机中心在世界坐标系中的位置b(t
x
,t
y
)。
[0112]
相机中心坐标平移矩阵为:其中,相机中心在相机坐标系中的位置c(c
x
,c
y
);
[0113]
故有:
[0114]
得出:
[0115]
则公式1即为相机间位置关系计算算法公式。
[0116]
其调整方法具体步骤如下,如图11和图12所示,
[0117]
前置条件:
[0118]
一、待调整成像镜头安装角度的整机的硬件已经就绪,整机的硬件包括运动系统100,成像系统200和成像镜头角度标定相机304。
[0119]
二、其中,运动系统包括x、y和z轴和吸盘105。
[0120]
三、其中,成像系统200包括成像光源、成像镜头、空间光调制器控制模块202和空间光调制器(slm)203。
[0121]
四、成像镜头已经完成安装角度的机械粗调,安装角度在机械误差的限制范围内。
[0122]
五、驱动整机的软件系统中安装了用于驱动本发明标定装置的软件模块,该软件模块通过软件系统接口控制运动系统(x、y、z)、成像光源、空间光调制器控制模块202和成像镜头角度标定相机304等硬件。
[0123]
准备阶段:
[0124]
step1:通过角度标定相机304进行一次成像镜头的安装角度标定,得出成像镜头的当前安装角度θ';
[0125]
step2:将本装置水平固定在吸盘105上,装置的长边方向与直接成像系统的扫描方向垂直。
[0126]
step3:驱动运动系统移动本装置到成像镜头的正下方的合适位置。即成像系统成像可以完整落在工业相机441的成像面上,且清晰成像;
[0127]
装调阶段:
[0128]
step1:向计算模块提供当前成像镜头的标定角度;
[0129]
step2:打开成像光源,通过空间光调制器控制模块202向空间光调制器(slm)203中投放包含两个用于标定的标记的图像,根据前置条件的描述,该图像会在工业相机441中清晰成像。使用图像处理方法计算出两个标记在工业相机441中的位置,分别记为:a1(x
11
,y
11
),b1(x
12
,y
12
),此时:初次安装角度为θ'。
[0130]
step3:微调成像镜头,此时因为角度的变化,计算机可实时计算出标记在工业相机441的成像的两个标记坐标为a2(x
21
,y
21
),b2(x
22
,y
22
)。并且实时计算出当前偏转角度与初次安装角度θ'的角度偏差δ。如图10所示;
[0131]
令向量:
[0132][0133][0134][0135]
得
[0136]
当前的安装角度为:θ=θ'+δ
[0137]
step4:计算机判断当前的安装角度θ是否在有效角度范围a内,如果在有效角度范围a内,则提示操作人员已经满足要求。转到步骤6执行。如果没有满足要求,根据当前的安装角度θ的大小,进行相反方向的角度调整,即角度偏大,向更小的角度方向调整,角度偏小,向更大的角度方向调整。
[0138]
step5:步骤3是人工行为,步骤4是计算机行为,两者同时进行。
[0139]
step6:紧固成像镜头,并实时监测安装角度的变化。如果角度超过有效角度范围a,在发前紧固的程度下,重新回到步骤3进行微调,直至满足安装角度的要求,再继续步骤6的紧固工作。
[0140]
综合所述,本发明的调整成像镜头安装角度的辅助装置和调整方法,无需多次用底部相机进行标定,成像镜头角度调整效率高;由于是实时显示调整校对,可以把误差调整在很小的范围内。
[0141]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1