光学系统的制作方法
1.本公开涉及一种光学系统,尤其涉及一种具有压电式驱动组件的光学元件系统。
背景技术:
2.随着科技的发展,现今许多电子装置(例如智能手机或数字相机)皆具有照相或录影的功能。这些电子装置的使用越来越普遍,并朝着便利和轻薄化的设计方向进行发展,以提供使用者更多的选择。
3.前述具有照相或录影功能的电子装置通常设有驱动机构,以驱动光学元件(例如为镜头)沿着光轴进行移动,进而达到自动对焦(auto focus,af)或光学防手震(optical image stablization,ois)的功能。光线可穿过前述光学元件在感光元件上成像。然而,现今移动装置的趋势是希望可具有较小的体积并且具有较高的耐用度,因此如何有效地降低驱动机构的尺寸以及提升其耐用度始成为一重要的课题。此外,如何使前述电子装置捕捉各方向上的图像亦是目前业界在乎的一课题。
技术实现要素:
4.本公开的目的在于提供一种光学系统,以解决上述至少一个问题。
5.本公开实施例提供一种光学系统,包括第一光学模块。第一光学模块包括第一固定部、第一活动部、第一驱动组件以及电路组件。第一活动部用以连接第一光学元件并可动地连接第一固定部。第一驱动组件用以驱动第一活动部相对第一固定部运动。电路组件电性连接第一驱动组件。
6.在一些实施例中,其中第一驱动组件用以驱动第一活动部相对第一固定部以一第一方向为转轴进行旋转,且第一驱动组件包括:第一驱动源,用以产生第一驱动力,包括:第一压电元件;以及第一弹性元件,设置于第一压电元件上;以及第一传输元件,连接第一驱动源,用以传输第一驱动力,其中第一传输元件具有长条形结构,沿着与第一方向不平行的一第二方向延伸。第一光学模块还包括:第一施压组件,用以施加一第一压力于第一驱动组件,第一驱动组件与第一活动部沿着第一压力的方向排列,第一压力方向与第一方向不平行,第一施压组件包括:第一施压元件,具有弹性的结构;第一调整元件,设置在第一施压元件上,用以调整第一压力的大小或方向,其中第一调整元件具有螺牙结构;以及第一框架,第一驱动组件设置于第一框架上;第一黏着元件,其中第一传输元件经由第一黏着元件连接第一驱动源;第二黏着元件,其中第一弹性元件经由第二黏着元件连接第一压电元件;第三黏着元件,其中第一传输元件经由第三黏着元件连接第一框架,其中第一黏着元件的杨式模量大于第二黏着元件的杨式模量,第二黏着元件的杨式模量大于第三黏着元件的杨式模量,第一黏着元件的杨式模量大于第三黏着元件的杨式模量;以及位置感测组件,用以感测第一活动部相对固定部的运动。
7.在一些实施例中,其中第一框架包括:第一本体;一第一穿孔,位于第一本体上并用以容纳至少部分第一传输元件;一第二穿孔,位于第一本体上并用以容纳至少部分第一
传输元件;一第一承靠部,位于第一本体上并对应第一施压组件;以及第二承靠部,位于第一本体上并对应第一施压组件,其中第一承靠部以及第二承靠部的排列方向与第二方向平行。
8.在一些实施例中,其中第一光学元件用以调整一入射光的光轴由一入射方向转换为第一出射方向,入射方向与第一出射方向不平行,且第一光学模块还包括:第二活动部,用以连接一第二光学元件并可相对固定部运动;第二驱动组件,用以驱动第二活动部相对第一固定部运动,其中第二驱动组件用以驱动第二活动部相对第一固定部以第一方向为转轴进行旋转,第二光学元件用以调整入射光的光轴由第一出射方向转换为第二出射方向,第一出射方向与第二出射方向不平行。
9.在一些实施例中,其中第二驱动组件包括:第二驱动源,用以产生第二驱动力,包括:第二压电元件;第二弹性元件,设置于第二压电元件;第二传输元件,用以传输第二驱动力,其中第二传输元件具有长条形结构,沿着与第一方向不平行的第三方向延伸,且第一光学模块还包括:第二施压组件,用以施加第二压力于第二驱动组件,第二驱动组件与第二活动部沿着第二压力的方向排列,第二压力的方向与第一方向不平行,第二施压组件包括:第二施压元件,具有弹性结构;第二调整元件,用以调整第二压力的大小或方向。
10.在一些实施例中,其中第一活动部、第二活动部相对第一固定部以相同的轴心进行旋转,沿着第一方向观察时,第一驱动组件以及第二驱动组件不重叠,沿着第二方向观察时,第一驱动组件以及第二驱动组件不重叠,沿着第四方向观察时,第一驱动组件以及第二驱动组件不重叠,其中第一方向、第二方向以及第四方向互相垂直,第二方向、第三方向互相平行,沿着第二方向观察时,第一驱动组件以及第二驱动组件沿着第五方向排列,第五方向与第一方向、第二方向、第四方向皆不平行,第五方向与第一方向、第四方向皆不垂直,且第一驱动力的方向与第二驱动力的方向平行。
11.在一些实施例中,光学系统还包括第二光学模块,对应第一光学模块,第二光学模块包括:镜片;以及感光元件,对应镜片,其中镜片与感光元件沿着第二出射方向排列,第二出射方向与第一方向不平行,第二出射方向与第二方向平行,第一光学模块以及第二光学模块沿着第二方向排列。
12.在一些实施例中,光学系统还包括:第三活动部,连接第一光学模块以及第二光学模块;第二固定部,第三活动部可相对第二固定部运动;第三驱动组件,用以驱动第三活动部相对第二固定部运动,其中第三驱动组件用以驱动第三活动部相对第二固定部以第六方向为转轴进行旋转,第三驱动组件包括:第三驱动源,用以产生第三驱动力,第三驱动源包括:第三压电元件;第三弹性元件,设置于第三压电元件;以及第三传输元件,用以传输第三驱动力,其中第三传输元件具有长条形的结构,沿着与第六方向不平行的第七方向延伸。
13.在一些实施例中,光学系统还包括:第三施压组件,用以施加第三压力于第三驱动组件,第三驱动组件与第三活动部沿着第三压力的方向排列,第三压力方向与第六方向不平行,且第三施压组件包括:第三施压元件,具有弹性结构;第三调整元件,用以调整第三压力的大小或方向,其中第一方向与第六方向不平行,第七方向与假想平面平行,假想平面与第一方向平行,且假想平面与第六方向垂直,第一驱动组件以及第二驱动组件可相对第三驱动组件运动,沿着第六方向观察时,第三驱动组件与第一驱动组件不重叠,沿着第六方向观察时,第三驱动组件与第二驱动组件并不重叠。
14.在一些实施例中,光学系统还包括:控制元件,用以控制第一驱动组件以及第二驱动组件;电源;无线传输元件,用以输出无线信号至外部设备;无源电子元件,设置在第二电路元件上;干扰抑止元件,设置在第二电路元件上,且电路组件包括:第一电路元件;第二电路元件,其中第一电路元件以及第二电路元件沿着第六方向排列;以及第一间隔元件,设置于第一电路元件以及第二电路元件之间,其中第一电路元件以及第二电路元件具有板状结构,第一电路元件以及第二电路元件互相平行,第一电路元件以及第二电路元件具有间隔,第一电路元件较第二电路元件靠近第二光学模块,位置感测组件至少部分设置于第一电路元件,第一驱动组件电性连接第一电路元件,电源、无线传输元件、控制元件设置于第二电路元件上,干扰抑止元件设置于第一位置感测组件与第二电路元件之间,且干扰抑止元件设置于第一电路元件以及第二电路元件之间。
15.本公开的有益效果在于,本公开实施例提供一种光学系统,包括第一光学模块,第一光学模块包括第一固定部、第一活动部、第一驱动组件以及电路组件。第一活动部用以连接第一光学元件并可动地连接第一固定部,第一驱动组件用以驱动第一活动部相对第一固定部运动,电路组件电性连接第一驱动组件。由此,光学系统可在各个方向进行摄影,并且还可达成小型化。
附图说明
16.以下将配合所附附图详述本公开的实施例。应注意的是,依据在业界的标准做法,多种特征并未按照比例示出且仅用以说明例示。事实上,可能任意地放大或缩小元件的尺寸,以清楚地表现出本公开的特征。
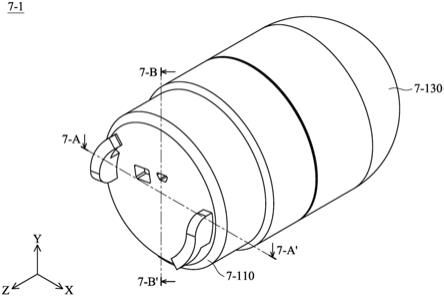
17.图1是本公开一些实施例中的光学系统的示意图。
18.图2是光学系统的爆炸图。
19.图3a以及图3b分别是沿着图1中的线段7
‑
a
‑7‑
a’以及线段7
‑
b
‑7‑
b’示出的剖面图。
20.图4是第一光学模块以及第二光学模块的爆炸图。
21.图5a是第一光学模块一些元件的透视图。
22.图5b是第一驱动组件或第二驱动组件的示意图
23.图5c是第一驱动组件或第二驱动组件的俯视图
24.图5d是第一驱动组件或第二驱动组件的剖面图。
25.图5e是沿着第一方向观察时,第一驱动组件、第二驱动组件、第一壳体的示意图。
26.图5f是沿着第二方向观察时,第一驱动组件、第二驱动组件、第一壳体的示意图。
27.图5g是沿着第四方向观察时,第一驱动组件、第二驱动组件、第一壳体的示意图。
28.图6是第二光学模块的爆炸图。
29.图7a是光学系统一些元件的示意图。
30.图7b是光学系统一些元件的俯视图。
31.图8是光学系统一些元件从第六方向观察时的示意图。
32.图9a、图9b、图9c是光学系统进行运作时的示意图。
33.附图标记如下:
[0034]7‑
1光学系统
[0035]7‑
100固定部
[0036]7‑
110第一固定部
[0037]7‑
120第二固定部
[0038]7‑
130第三固定部
[0039]7‑
200第一光学模块
[0040]7‑
210第一驱动组件
[0041]7‑
212第一驱动源
[0042]7‑
2121第一压电元件
[0043]7‑
2122第二压电元件
[0044]7‑
2123第一弹性元件
[0045]7‑
2124第一黏着元件
[0046]7‑
2125第二黏着元件
[0047]7‑
2126第三黏着元件
[0048]7‑
213第一施压元件
[0049]7‑
214第一传输元件
[0050]7‑
215第一调整元件
[0051]7‑
216第一框架
[0052]7‑
2161第一本体
[0053]7‑
2162第一承靠部
[0054]7‑
2163第二承靠部
[0055]7‑
2164第一穿孔
[0056]7‑
2165第二穿孔
[0057]7‑
218第一活动部
[0058]7‑
219第一线路
[0059]7‑
220第二驱动组件
[0060]7‑
222第二驱动源
[0061]7‑
2221第三压电元件
[0062]7‑
2222第四压电元件
[0063]7‑
2223第二弹性元件
[0064]7‑
2224第四黏着元件
[0065]7‑
2225第五黏着元件
[0066]7‑
2226第六黏着元件
[0067]7‑
223第二施压元件
[0068]7‑
224第二传输元件
[0069]7‑
225第二调整元件
[0070]7‑
226第二框架
[0071]7‑
2261第二本体
[0072]7‑
2262第三承靠部
[0073]7‑
2263第四承靠部
[0074]7‑
2264第三穿孔
[0075]7‑
2265第四穿孔
[0076]7‑
228第二活动部
[0077]7‑
229第二线路
[0078]7‑
230第一壳体
[0079]7‑
230a进光口
[0080]7‑
231第一转轴
[0081]7‑
232第二转轴
[0082]7‑
233第一光学元件
[0083]7‑
234第二光学元件
[0084]7‑
235承载部
[0085]7‑
240第二壳体
[0086]7‑
242开口
[0087]7‑
244第一凸柱
[0088]7‑
245第二凸柱
[0089]7‑
246第三凸柱
[0090]7‑
247第四凸柱
[0091]7‑
250电路组件
[0092]7‑
251第一电路元件
[0093]7‑
252第二电路元件
[0094]7‑
260间隔元件
[0095]7‑
270上盖
[0096]7‑
272第三转轴
[0097]7‑
274卡扣
[0098]7‑
276轴承
[0099]7‑
300第二光学模块
[0100]7‑
310顶壳
[0101]7‑
320底座
[0102]7‑
330承载座
[0103]7‑
340镜片
[0104]7‑
350第四驱动组件
[0105]7‑
352第四驱动源
[0106]7‑
354第四传输元件
[0107]7‑
400第三驱动组件
[0108]7‑
402第三驱动源
[0109]7‑
4021第五压电元件
[0110]7‑
4022第六压电元件
[0111]7‑
4023第三弹性元件
[0112]7‑
404第三传输元件
[0113]7‑
406第三框架
[0114]7‑
408第三活动部
[0115]7‑
410第三施压组件
[0116]7‑
412第三施压元件
[0117]7‑
414第三调整元件
[0118]7‑
420第三电路元件
[0119]7‑
500干扰抑止元件
[0120]7‑
501位置感测元件
[0121]7‑
502控制元件
[0122]7‑
504无线传输元件
[0123]7‑
506无源电子元件
[0124]7‑
508电源
[0125]7‑
a
‑7‑
a’,7
‑
b
‑7‑
b’线段
[0126]7‑
d1第一方向
[0127]7‑
d2第二方向
[0128]7‑
d3第三方向
[0129]7‑
d4第四方向
[0130]7‑
d5第五方向
[0131]7‑
d6第六方向
[0132]7‑
d7第七方向
[0133]7‑
e11,7
‑
e12,7
‑
e13第一出射方向
[0134]7‑
e21,7
‑
e22,7
‑
e23第二出射方向
[0135]7‑
i1,7
‑
i2,7
‑
i3入射方向
[0136]7‑
o主轴
[0137]7‑
p1第一压力
[0138]7‑
p2第二压力
[0139]7‑
p3第三压力
具体实施方式
[0140]
以下公开许多不同的实施方法或是范例来实行所提供的不同特征,以下描述具体的元件及其排列的实施例以阐述本公开。当然,这些实施例仅用以例示,且不该以此来限定本公开的范围。举例来说,在说明书中提到第一特征部件形成于第二特征部件之上,其包括第一特征部件与第二特征部件是直接接触的实施例,另外也包括于第一特征部件与第二特征部件之间另外有其他特征的实施例,也就是说,第一特征部件与第二特征部件并非直接地接触。
[0141]
此外,在不同实施例中可能使用重复的标号或标示,这些重复仅为了简单清楚地叙述本公开,不代表所讨论的不同实施例及/或结构之间有特定的关系。此外,在本公开中的在另一特征部件之上形成、连接到及/或耦接到另一特征部件可包括其中特征部件形成为直接接触的实施例,并且还可包括其中可形成插入上述特征部件的附加特征部件的实施
例,使得上述特征部件可能不直接接触。此外,其中可能用到与空间相关用词,例如“垂直的”、“上方”、“上”、“下”、“底”及类似的用词(如“向下地”、“向上地”等),这些空间相关用词是为了便于描述图示中一个(些)元件或特征与另一个(些)元件或特征之间的关系,这些空间相关用词旨在涵盖包括特征的装置的不同方向。
[0142]
除非另外定义,在此使用的全部用语(包括技术及科学用语)具有与此篇公开所属的本领域技术人员所通常理解的相同涵义。能理解的是这些用语,例如在通常使用的字典中定义的用语,应被解读成具有一与相关技术及本公开的背景或上下文一致的意思,而不应以一理想化或过度正式的方式解读,除非在此进行特别定义。
[0143]
再者,说明书与权利要求中所使用的序数例如“第一”、“第二”等的用词,以修饰权利要求的元件,其本身并不意含及代表该请求元件有任何之前的序数,也不代表某一请求元件与另一请求元件的顺序、或是制造方法上的顺序,多个序数的使用仅用来使具有某命名的一请求元件得以和另一具有相同命名的请求元件能做出清楚区分。
[0144]
以下公开许多不同的实施方法或是范例来实行所提供的不同特征,以下描述具体的元件及其排列的实施例以阐述本公开。当然这些实施例仅用以例示,且不该以此限定本公开的范围。举例来说,应理解的是,当元件被称为“连接到”或“耦接到”另一个元件时,其可直接连接到或耦接到另一个元件,或亦可存在一或多个中间的元件。
[0145]
图1是本公开一些实施例中的光学系统7
‑
1的示意图,图2是光学系统7
‑
1的爆炸图,而图3a以及图3b分别是沿着图1中的线段7
‑
a
‑7‑
a’以及线段7
‑
b
‑7‑
b’示出的剖面图,其中线段7
‑
a
‑7‑
a’与线段7
‑
b
‑7‑
b’彼此垂直。光学系统7
‑
1主要可包括在主轴7
‑
o上排列的固定部7
‑
100(包括第一固定部7
‑
110、第二固定部7
‑
120、第三固定部7
‑
130)、第一光学模块7
‑
200、第二光学模块7
‑
300以及其他元件(于随后说明)。
[0146]
固定部7
‑
100可构成光学系统7
‑
1的外壳,而第一光学模块7
‑
200以及第二光学模块7
‑
300可设置在固定部7
‑
100中。举例来说,第一固定部7
‑
110以及第二固定部7
‑
120可锁固在第三固定部7
‑
130上,并且第二固定部7
‑
120可设置在第一固定部7
‑
110以及第三固定部7
‑
130之间。
[0147]
在一些实施例中,第三固定部7
‑
130的材料可包括透明材料(例如玻璃或塑胶),而外界的光线可通过第三固定部7
‑
130,并通过第一光学模块7
‑
200调整此外界光线的路径以抵达第二光学模块7
‑
300。由此,光学系统7
‑
1可对不同方向上的光线进行感测。
[0148]
图4是第一光学模块7
‑
200以及第二光学模块7
‑
300的爆炸图。图5a是第一光学模块7
‑
200一些元件的透视图。第一光学模块7
‑
200主要可包括第一驱动组件7
‑
210、第二驱动组件7
‑
220、第一壳体7
‑
230、第二壳体7
‑
240、电路组件7
‑
250(包括第一电路元件7
‑
251、第二电路元件7
‑
252)、间隔元件7
‑
260以及上盖7
‑
270。
[0149]
第一驱动组件7
‑
210以及第二驱动组件7
‑
220可设置在第一壳体7
‑
230的两侧。第一驱动组件7
‑
210主要可包括第一驱动源7
‑
212、第一传输元件7
‑
214、第一框架7
‑
216、第一活动部7
‑
218。第二驱动组件7
‑
220主要可包括第二驱动源7
‑
222、第二传输元件7
‑
224、第二框架7
‑
226、第二活动部7
‑
228。此外,可在第一壳体7
‑
230中设置一第一光学元件7
‑
233、第二光学元件7
‑
234以及承载部7
‑
235。第一壳体7
‑
230可通过第一转轴7
‑
231连接第一活动部7
‑
218,而承载部7
‑
235可动地设置在第一壳体7
‑
230中,并通过第二转轴7
‑
232连接第二活动部7
‑
228。第一光学元件7
‑
233固定在第一壳体7
‑
230上,而第二光学元件7
‑
234固定在承
载部7
‑
235上。此外,如图3a所示,第一壳体7
‑
230可具有一进光口7
‑
230a,可允许光线通过进光口7
‑
230a进入到第一壳体7
‑
230之中。
[0150]
第一壳体7
‑
230可设置在第二壳体7
‑
240上,并且可相对于第二壳体7
‑
240以第一转轴7
‑
231以及第二转轴7
‑
232进行转动。第二壳体7
‑
240与上盖7
‑
270内可形成一空间,且第二光学模块7
‑
300、第一电路元件7
‑
251、第二电路元件7
‑
252可设置在此空间中。
[0151]
在一些实施例中,第一电路元件7
‑
251以及第二电路元件7
‑
252例如可为电路板,且第一电路元件7
‑
251以及第二电路元件7
‑
252可沿着主轴7
‑
o的方向(第六方向7
‑
d6,于随后说明)排列,且第一电路元件7
‑
251与第二电路元件7
‑
252可具有板状的结构并互相平行。此外,如图4所示,第一电路元件7
‑
251较第二电路元件7
‑
252靠近第二光学模块7
‑
300。
[0152]
间隔元件7
‑
260可设置在第一电路元件7
‑
251以及第二电路元件7
‑
252之间,以隔开第一电路元件7
‑
251以及第二电路元件7
‑
252。换句话说,第一电路元件7
‑
251与第二电路元件7
‑
252之间具有一间隔。干扰抑止元件7
‑
500(图3a、图3b)例如可设置在第二电路元件7
‑
252上,并且亦可设置在第一电路元件7
‑
251以及第二电路元件7
‑
252之间,以防止设置在第一电路元件7
‑
251以及第二电路元件7
‑
252之间的各元件的信号发生干扰。举例来说,可将干扰抑止元件7
‑
500设置于一位置感测元件7
‑
501(图3a、图3b)与第二电路元件7
‑
252之间。
[0153]
控制元件7
‑
502、无线传输元件7
‑
504、无源电子元件7
‑
506、电源7
‑
508例如可设置在第二电路元件7
‑
252上。然而,本公开并不以此为限,可根据实际需求调整各元件之间的位置关系。控制元件7
‑
502可用以对第一驱动组件7
‑
210、第二驱动组件7
‑
220、第四驱动组件7
‑
350进行控制。无线传输元件7
‑
504例如可通过无线传输的方式来控制光学系统7
‑
1,例如可用以输出一无线信号至一外部设备(未示出)。无源电子元件7
‑
506例如可为电容、电阻、电感等无源电子元件。电源7
‑
508例如可为一电池,用以输出能量给第一驱动组件7
‑
210、第二驱动组件7
‑
220、第四驱动组件7
‑
350。
[0154]
在一些实施例中,上盖7
‑
270上可延伸出一第三转轴7
‑
272,设置在第三活动部7
‑
408中,以允许上盖7
‑
270随着第三活动部7
‑
408一起移动。上盖7
‑
270随着第三活动部7
‑
408一起移动的实施例将于随后说明。此外,在第三转轴7
‑
272上还可具有一轴承7
‑
276,用以降低旋转时的摩擦力。在一些实施例中,可在上盖7
‑
270上设计一卡扣7
‑
274,并在第二壳体7
‑
240上设计一开口7
‑
242,以通过将卡扣7
‑
274设置在开口7
‑
242中,将上盖7
‑
270固定在第二壳体7
‑
240上。
[0155]
在一些实施例中,如图4所示,可将第一转轴7
‑
231所延伸的方向定义为第一方向7
‑
d1,且可将第一传输元件7
‑
214所延伸的方向定义为第二方向7
‑
d2,并将第二传输元件7
‑
224所延伸的方向定义为第三方向7
‑
d3,其中第二方向7
‑
d2可与第三方向7
‑
d3彼此平行。
[0156]
图5b是第一驱动组件7
‑
210或第二驱动组件7
‑
220的示意图,图5c是第一驱动组件7
‑
210或第二驱动组件7
‑
220的俯视图,其中还额外示出了第一施压组件7
‑
211或第二施压组件7
‑
221。
[0157]
第一框架7
‑
216主要包括一第一本体7
‑
2161以及从第一本体7
‑
2161上延伸的第一承靠部7
‑
2162、第二承靠部7
‑
2163。第一承靠部7
‑
2162上可具有第一穿孔7
‑
2164,第二承靠部7
‑
2163上可具有第二穿孔7
‑
2165。第一承靠部7
‑
2162以及第二承靠部7
‑
2163可用以对应第一施压组件7
‑
211。第一施压组件7
‑
211可包括第一施压元件7
‑
213以及第一调整元件7
‑
215。
[0158]
举例来说,如图5c所示,第一承靠部7
‑
2162以及第二承靠部7
‑
2163可直接接触第一施压元件7
‑
213,以允许第一施压元件7
‑
213通过第一承靠部7
‑
2162以及第二承靠部7
‑
2163对第一框架7
‑
216施加与第一方向7
‑
d1不平行的一第一压力7
‑
p1,从而第一驱动组件7
‑
210与第一活动部7
‑
218沿着第一压力7
‑
p1的方向排列。
[0159]
第一承靠部7
‑
2162以及第二承靠部7
‑
2163的排列方向与第一传输元件7
‑
214的延伸方向平行。在一些实施例中,第一施压元件7
‑
213设置在第一调整元件7
‑
215以及从第一壳体7
‑
230上延伸的第一凸柱7
‑
244上,而第一调整元件7
‑
215设置在从第一壳体7
‑
230上延伸的第二凸柱7
‑
245上,第一调整元件7
‑
215例如具有螺牙,以通过锁固的方式设置在第二凸柱7
‑
245上,并且可对第一调整元件7
‑
215与第二凸柱7
‑
245之间的相对位置进行调整,以进一步调整第一压力7
‑
p1的大小或方向。
[0160]
图5d是第一驱动组件7
‑
210或第二驱动组件7
‑
220的剖面图。如图5d所示,第一驱动源7
‑
212可固定在第一传输元件7
‑
214上,例如可通过一第一黏着元件7
‑
2124而固定在第一传输元件7
‑
214上。在一些实施例中,第一驱动源7
‑
212可包括一第一压电元件7
‑
2121、一第二压电元件7
‑
2122以及一第一弹性元件7
‑
2123。第一弹性元件7
‑
2123可设置在第一压电元件7
‑
2121以及第二压电元件7
‑
2122之间,并且可以通过第二黏着元件7
‑
2125固定在第一压电元件7
‑
2121以及第二压电元件7
‑
2122上。换句话说,第二黏着元件7
‑
2125可设置在第一弹性元件7
‑
2123的两侧。
[0161]
然而,本公开并不以此为限。举例来说,在一些实施例中,亦可省略第二压电元件7
‑
2122以及位在第二压电元件7
‑
2122和第一弹性元件7
‑
2123之间的第二黏着元件7
‑
2125以降低所需的元件数量,取决于设计需求。此外,第一线路7
‑
219(图4)可电性连接第一驱动组件7
‑
210以及第一电路元件7
‑
251,以允许设置在第一电路元件7
‑
251上的电子元件提供电信号给第一驱动组件7
‑
210。
[0162]
在一些实施例中,第一压电元件7
‑
2121以及第二压电元件7
‑
2122可由压电(piezoelectric)材料所形成。也就是说,当在第一压电元件7
‑
2121或第二压电元件7
‑
2122表面施加电场(电压),会拉长第一压电元件7
‑
2121或第二压电元件7
‑
2122的电偶极矩(electric dipole moment),而第一压电元件7
‑
2121或第二压电元件7
‑
2122为抵抗变化,会沿电场方向伸长。因此,可将电能转化为机械能。在一些实施例中,第一压电元件7
‑
2121或第二压电元件7
‑
2122可进行变形而使第一传输元件7
‑
214在第二方向7
‑
d2上进行移动。
[0163]
此外,如图5c以及图5d所示,可将第一传输元件7
‑
214设置在第一框架7
‑
216上。举例来说,第一传输元件7
‑
214可通过第一穿孔7
‑
2164以及第二穿孔7
‑
2165,并且可在第一传输元件7
‑
214与第二穿孔7
‑
2165之间设置第三黏着元件7
‑
2126,以黏合第一传输元件7
‑
214与第二穿孔7
‑
2165。由此,第一传输元件7
‑
214可与第一框架7
‑
216一起进行移动。虽然在本实施例中在第一框架7
‑
216上设计第一穿孔7
‑
2164以及第二穿孔7
‑
2165,但也可以设计成凹陷或其他第一传输元件7
‑
214可设置在其中的结构,取决于设计需求。
[0164]
在一些实施例中,第一黏着元件7
‑
2124的杨式模量(young’s modulus)大于第二黏着元件7
‑
2125的杨式模量,第二黏着元件7
‑
2125的杨式模量大于第三黏着元件7
‑
2126的杨式模量。即,第一黏着元件7
‑
2124的杨式模量大于第三黏着元件7
‑
2126的杨式模量。
[0165]
举例来说,通过第一黏着元件7
‑
2124黏着的第一驱动源7
‑
212以及第一传输元件
7
‑
214之间的相对位置可彼此固定,而通过第二黏着元件7
‑
2125黏着的第一压电元件7
‑
2121、第二压电元件7
‑
2122以及第一弹性元件7
‑
2123之间的相对位置与通过第三黏着元件7
‑
2126黏着的第一传输元件7
‑
214、第一框架7
‑
216之间的相对位置可进行改变,以允许第一传输元件7
‑
214在第二方向7
‑
d2上进行移动。
[0166]
第二框架7
‑
226主要包括一第二本体7
‑
2261以及从第二本体7
‑
2261上延伸的第三承靠部7
‑
2262、第四承靠部7
‑
2263。第三承靠部7
‑
2262上可具有第三穿孔7
‑
2264,第四承靠部7
‑
2263上可具有第四穿孔7
‑
2265。第三承靠部7
‑
2262以及第四承靠部7
‑
2263可用以对应第二施压组件7
‑
221。第二施压组件7
‑
221可包括第二施压元件7
‑
223以及第二调整元件7
‑
225。
[0167]
举例来说,如图5c所示,第三承靠部7
‑
2262以及第四承靠部7
‑
2263可直接接触第二施压元件7
‑
223,以允许第二施压元件7
‑
223通过第三承靠部7
‑
2262以及第四承靠部7
‑
2263对第二框架7
‑
226施加与第一方向7
‑
d1不平行的一第二压力7
‑
p2,从而第二驱动组件7
‑
220与第二活动部7
‑
228沿着第二压力7
‑
p2的方向排列。
[0168]
第三承靠部7
‑
2262以及第四承靠部7
‑
2263的排列方向与第二传输元件7
‑
224的延伸方向平行。在一些实施例中,第二施压元件7
‑
223设置在第一调整元件7
‑
225以及从第一壳体7
‑
230上延伸的第三凸柱7
‑
246上,而第二调整元件7
‑
225设置在从第一壳体7
‑
230上延伸的第四凸柱7
‑
247上,第二调整元件7
‑
255例如具有螺牙,以通过锁固的方式设置在第四凸柱7
‑
247上,并且可对第二调整元件7
‑
215与第四凸柱7
‑
247之间的相对位置进行调整,以进一步调整第二压力7
‑
p2的大小或方向。
[0169]
如图5d所示,第二驱动源7
‑
222可固定在第二传输元件7
‑
224上,例如可通过一第四黏着元件7
‑
2224而固定在第二传输元件7
‑
224上。在一些实施例中,第二驱动源7
‑
222可包括一第三压电元件7
‑
2221、一第四压电元件7
‑
2222以及一第二弹性元件7
‑
2223。第二弹性元件7
‑
2223可设置在第三压电元件7
‑
2221以及第四压电元件7
‑
2222之间,并且可以通过第五黏着元件7
‑
2225固定在第三压电元件7
‑
2221以及第四压电元件7
‑
2222上。换句话说,在一些实施例中,第五黏着元件7
‑
2225可设置在第二弹性元件7
‑
2223的两侧。
[0170]
然而,本公开并不以此为限。举例来说,在一些实施例中,可省略第四压电元件7
‑
2222以及位在第四压电元件7
‑
2222和第二弹性元件7
‑
2223之间的第五黏着元件7
‑
2225,取决于设计需求。此外,第二线路7
‑
229(图4)可电性连接第二驱动组件7
‑
220以及第一电路元件7
‑
251,以允许设置在第一电路元件7
‑
251上的电子元件提供电信号给第二驱动组件7
‑
220。
[0171]
在一些实施例中,第三压电元件7
‑
2221以及第四压电元件7
‑
2222可由压电(piezoelectric)材料所形成。也就是说,当在第三压电元件7
‑
2221或第四压电元件7
‑
2222表面施加电场(电压),会拉长第三压电元件7
‑
2221或第四压电元件7
‑
2222的电偶极矩(electric dipole moment),而第三压电元件7
‑
2221或第四压电元件7
‑
2222为抵抗变化,会沿电场方向伸长。因此,可将电能转化为机械能。在一些实施例中,第三压电元件7
‑
2221或第四压电元件7
‑
2222可进行变形而使第二传输元件7
‑
224在第三方向7
‑
d3上进行移动。
[0172]
此外,如图5c以及图5d所示,可将第二传输元件7
‑
224设置在第二框架7
‑
226上。举例来说,第二传输元件7
‑
224可通过第三穿孔7
‑
2264以及第四穿孔7
‑
2165,并且可在第二传输元件7
‑
224与第四穿孔7
‑
2265之间设置第六黏着元件7
‑
2226,以黏合第二传输元件7
‑
214
与第四穿孔7
‑
2265。由此,第二传输元件7
‑
224可与第二框架7
‑
226一起进行移动。虽然在本实施例中在第二框架7
‑
226上设计第三穿孔7
‑
2264以及第四穿孔7
‑
2265,但也可以设计成凹陷或其他第二传输元件7
‑
224可设置在其中的结构,取决于设计需求。
[0173]
在一些实施例中,第四黏着元件7
‑
2224的杨式模量(young’s modulus)大于第五黏着元件7
‑
2225的杨式模量,第五黏着元件7
‑
2225的杨式模量大于第六黏着元件7
‑
2226的杨式模量。即,第四黏着元件7
‑
2224的杨式模量大于第六黏着元件7
‑
2226的杨式模量。
[0174]
举例来说,通过第四黏着元件7
‑
2224黏着的第二驱动源7
‑
222以及第二传输元件7
‑
224之间的相对位置可彼此固定,而通过第五黏着元件7
‑
2225黏着的第三压电元件7
‑
2221、第四压电元件7
‑
2222以及第二弹性元件7
‑
2223之间的相对位置与通过第六黏着元件7
‑
2226黏着的第二传输元件7
‑
224、第二框架7
‑
226之间的相对位置可进行改变,以允许第二传输元件7
‑
224在第三方向7
‑
d3上进行移动。
[0175]
第一驱动组件7
‑
210可通过设置在第一活动部7
‑
218中的第一转轴7
‑
231来驱动第一壳体7
‑
230相对固定部7
‑
100以第一转轴7
‑
231为旋转轴进行旋转。举例来说,如图5a所示,第一驱动组件7
‑
210的第一传输元件7
‑
214可通过摩擦接触的方式设置在第一活动部7
‑
218的凹槽中。换句话说,第一传输元件7
‑
214与第一活动部7
‑
218间是以彼此之间的最大静摩擦力固定。
[0176]
第二驱动组件7
‑
220可通过设置在第二活动部7
‑
228之中的第二转轴7
‑
232来驱动承载部7
‑
235相对固定部7
‑
100以第二转轴7
‑
232为旋转轴进行旋转。举例来说,如图5a所示,第二驱动组件7
‑
220的第二传输元件7
‑
224可通过摩擦接触的方式设置在第二活动部7
‑
228的凹槽中。换句话说,第二传输元件7
‑
224与第二活动部7
‑
228间是以彼此之间的最大静摩擦力固定。
[0177]
可通过调整第一施压组件7
‑
211通过第一框架7
‑
216对第一传输元件7
‑
214所施加的第一压力7
‑
p1,来调整第一传输元件7
‑
214与第一活动部7
‑
218之间的摩擦力。此外,由于第一传输元件7
‑
214可被第一驱动源7
‑
212所驱动而移动,若对第一驱动源7
‑
212提供较弱的一第一电信号,则第一传输元件7
‑
214的移动速度亦会较低,而并不会使第一传输元件7
‑
214与第一活动部7
‑
218之间的作用力大于最大静摩擦力,所以可带动第一活动部7
‑
218与第一传输元件7
‑
214一起移动,即第一活动部7
‑
218可相对于第一转轴7
‑
231进行旋转。
[0178]
接着,若对第一驱动源7
‑
212提供较强的一第一电信号,则第一传输元件7
‑
214的移动速度会较高,而使第一传输元件7
‑
214与第一活动部7
‑
218之间的作用力大于最大静摩擦力,所以第一传输元件7
‑
214会与第一活动部7
‑
218之间发生相对运动,即当第一传输元件7
‑
214移动时,第一活动部7
‑
218并未随着第一传输元件7
‑
214一起转动。
[0179]
通过重复前述步骤,可允许第一活动部7
‑
218在一特定方向上转动,进而允许设置在第一壳体7
‑
230上的第一光学元件7
‑
233一起转动。此外,通过类似的原理,亦可允许第二活动部7
‑
228在一特定方向上转动,进而允许设置在承载部7
‑
235上的第二光学元件7
‑
234一起转动。
[0180]
第一驱动源7
‑
212可产生一第一驱动力,第二驱动源7
‑
222可产生一第二驱动力,且第一驱动力的方向(第二方向7
‑
d2)与第二驱动力的方向(第三方向7
‑
d3)平行。因此,第一光学元件7
‑
233以及第二光学元件7
‑
234可分别以第一转轴7
‑
231和第二转轴7
‑
232为轴心转动,并且可通过第一驱动组件7
‑
210以及第二驱动组件7
‑
220独立控制第一光学元件7
‑
233以及第二光学元件7
‑
234的转动,以进一步调整入射到第一光学元件7
‑
233以及第二光学元件7
‑
234上的光线路径。
[0181]
在一些实施例中,可将与前述第一方向7
‑
d1、第二方向7
‑
d2垂直的方向定义为第四方向7
‑
d4。图5e是沿着第一方向7
‑
d1观察时,第一驱动组件7
‑
210、第二驱动组件7
‑
220、第一壳体7
‑
230的示意图,图5f是沿着第二方向7
‑
d2观察时,第一驱动组件7
‑
210、第二驱动组件7
‑
220、第一壳体7
‑
230的示意图,图5g是沿着第四方向7
‑
d4观察时,第一驱动组件7
‑
210、第二驱动组件7
‑
220、第一壳体7
‑
230的示意图。如图5e至图5g所示,沿着第一方向7
‑
d1、第二方向7
‑
d2、第四方向7
‑
d4观察时,第一驱动组件7
‑
210以及第二驱动组件7
‑
220彼此不重叠。
[0182]
此外,如图5f所示,沿着第二方向7
‑
d2观察时,第一驱动组件7
‑
210的第一传输元件7
‑
214与第二驱动组件7
‑
220的第二传输元件7
‑
224在一第五方向7
‑
d5上排列,即第一传输元件7
‑
214与第二传输元件7
‑
224圆心的连线方向为第五方向7
‑
d5,其中第五方向7
‑
d5与第一方向7
‑
d1、第二方向7
‑
d2、第三方向7
‑
d3、第四方向7
‑
d4皆不平行,且与第一方向7
‑
d1、第四方向7
‑
d4皆不垂直。此外,第一外壳7
‑
230亦与第一驱动组件7
‑
210和第二驱动组件7
‑
220在第五方向7
‑
d5上排列。由此,可降低光学系统7
‑
1在特定方向上的尺寸,而达到小型化。
[0183]
在一些实施例中,可设置一位置感测组件(未示出),用以感测第一活动部7
‑
218或第二活动部7
‑
228相对固定部7
‑
100的运动,例如可在第一活动部7
‑
218或第二活动部7
‑
228上设置一感测磁铁,并在第一电路元件7
‑
251上设置感测元件,并通过所感测的位置信号来控制第一驱动组件7
‑
210或第二驱动组件7
‑
220,以在第一活动部7
‑
218或第二活动部7
‑
228到达所欲的位置时停止对第一驱动组件7
‑
210或第二驱动组件7
‑
220进行驱动。前述感测元件可包括霍尔效应感测器(hall sensor)、磁阻效应感测器(magnetoresistance effect sensor,mr sensor)、巨磁阻效应感测器(giant magnetoresistance effect sensor,gmr sensor)、穿隧磁阻效应感测器(tunneling magnetoresistance effect sensor,tmr sensor)、或磁通量感测器(fluxgate sensor)。
[0184]
图6是第二光学模块7
‑
300的爆炸图。第二光学模块7
‑
300可包括顶壳7
‑
310、底座7
‑
320、承载座7
‑
330、镜片7
‑
340以及第四驱动组件7
‑
350。如图6所示,顶壳7
‑
310以及底座7
‑
320可相互组合而构成第二光学模块7
‑
300的外壳。承载座7
‑
330可设置在顶壳7
‑
310以及底座7
‑
320之间,而镜片7
‑
340可固定(例如锁固)在承载座7
‑
330上。第四驱动组件7
‑
350可包括第四驱动源7
‑
352以及第四传输元件7
‑
354,第四驱动组件7
‑
350的结构与运作原理和前述第一驱动组件7
‑
210、第二驱动组件7
‑
220类似,于此不再赘述。
[0185]
第四传输元件7
‑
352可通过摩擦接触的方式设置在承载座7
‑
330上,由此可通过第四驱动组件7
‑
350而驱动承载座7
‑
330在主轴7
‑
o的方向上移动,以一起带动镜片7
‑
340在主轴7
‑
o的方向上移动,而达到自动对焦(auto focus,af)的功能。
[0186]
图7a是第二固定部7
‑
120以及设置在第二固定部7
‑
120上的第三驱动组件7
‑
400和第三活动部7
‑
404的示意图,而图7b是前述元件的俯视图,其中在图7b中还额外示出了第三施压组件7
‑
410,而在图7a中为了简洁而省略了第三施压组件7
‑
410。
[0187]
第三驱动组件7
‑
400的结构可与前述第一驱动组件7
‑
210或者第二驱动组件7
‑
220类似,例如第三驱动组件7
‑
400亦可包括第三驱动源7
‑
402、第三传输元件7
‑
404、第三框架
7
‑
406,而第三驱动源7
‑
402可包括第五压电元件7
‑
4021、第六压电元件7
‑
4022以及第三弹性元件7
‑
4023的组合,并用以产生朝向第三传输元件7
‑
404延伸方向的第三驱动力,其位置关系的细节于此不再赘述。
[0188]
第三驱动组件7
‑
400用以驱动第三活动部7
‑
408相对第二固定部7
‑
120以在一第六方向7
‑
d6延伸的旋转轴进行旋转,而第三传输元件7
‑
404延伸的方向可定义为第七方向7
‑
d7,其中第六方向7
‑
d6与第七方向7
‑
d7不平行。
[0189]
此外,第三施压组件7
‑
410可包括第三施压元件7
‑
412以及第三调整元件7
‑
414,其原理与第一施压组件7
‑
211或第二施压组件7
‑
221类似,于此不再赘述。第三施压组件7
‑
410可施加第三压力7
‑
p3到第三驱动组件7
‑
400,而第三驱动组件7
‑
400与第三活动部7
‑
408沿着第三压力7
‑
p3的方向排列。
[0190]
如图7b所示,第三压力7
‑
p3的方向与第六方向7
‑
d6不平行。此外,图8是光学系统7
‑
1一些元件从第六方向7
‑
d6观察时的示意图。如图8所示,第一方向7
‑
d1与第六方向7
‑
d6不平行。换句话说,第一活动部7
‑
218与第三活动部7
‑
408转轴的方向不同。
[0191]
此外,在一些实施例中,可将与第一方向7
‑
d1和第七方向7
‑
d7皆平行的平面定义为假想平面(未示出),而此假想平面与第六方向7
‑
d6垂直。如图8所示,沿着第六方向7
‑
d6观察时,第三驱动组件7
‑
400与第一驱动组件7
‑
210不重叠,且第三驱动组件7
‑
400与第二驱动组件7
‑
220不重叠。因此,可降低光学系统7
‑
1在特定方向上的尺寸,而达到小型化。
[0192]
请回头参照图3a以及图3b,可将上盖7
‑
270上的第三转轴7
‑
272设置在第三活动部7
‑
408中,以允许第三驱动组件7
‑
400通过第三活动部7
‑
408带动上盖7
‑
270以及与上盖7
‑
270固定的第二壳体7
‑
240沿着主轴7
‑
o的方向转动,从而设置在第二壳体7
‑
240上的第一驱动组件7
‑
210以及第二驱动组件7
‑
220亦会被带动而一起旋转,即第一驱动组件7
‑
210以及第二驱动组件7
‑
220可相对第三驱动组件7
‑
400运动。在一些实施例中,可设置一位置感测器(未示出),用以感测第三活动部7
‑
408相对第二固定部7
‑
120的运动。
[0193]
此外,可在第二固定部7
‑
120上设置第三电路元件7
‑
420。第三电路元件7
‑
420例如为电路板,可电性连接第三驱动组件7
‑
400,并且可在第三电路元件7
‑
420上设置一位置感测元件(未示出),并在第三活动部7
‑
408上设置一感测磁铁(未示出),以通过感测磁铁的磁场变化而感测第三活动部7
‑
408的位置,从而对第三驱动组件7
‑
400进行控制。
[0194]
图9a、图9b、图9c是光学系统7
‑
1进行运作时的示意图。第一光学元件7
‑
233是用以调整入射光的光轴由一入射方向转换为一第一出射方向,其中此入射方向与第一出射方向并不平行,第二光学元件7
‑
234是用以调整入射光的光轴由第一出射方向转换为一第二出射方向,且第一出射方向与第二出射方向不平行。
[0195]
举例来说,如图9a所示,第一光学元件7
‑
233是用以调整入射光的光轴由一入射方向7
‑
i1转换为一第一出射方向7
‑
e11,入射方向7
‑
i1与第一出射方向7
‑
e11不平行,第二光学元件7
‑
234是用以调整入射光的光轴由第一出射方向7
‑
e11转换为一第二出射方向7
‑
e21,第一出射方向7
‑
e11与第二出射方向7
‑
e21不平行。
[0196]
接着,当入射光的方向改变时,如图9b所示,第一光学元件7
‑
233是用以调整入射光的光轴由一入射方向7
‑
i2转换为一第一出射方向7
‑
e12,入射方向7
‑
i2与第一出射方向7
‑
e12不平行,第二光学元件7
‑
234是用以调整入射光的光轴由第一出射方向7
‑
e12转换为一第二出射方向7
‑
e22,第一出射方向7
‑
e12与第二出射方向7
‑
e22不平行。
[0197]
接着,当入射光的方向进一步改变时,如图9c所示,第一光学元件7
‑
233是用以调整入射光的光轴由一入射方向7
‑
i3转换为一第一出射方向7
‑
e13,入射方向7
‑
i3与第一出射方向7
‑
e13不平行,第二光学元件7
‑
234是用以调整入射光的光轴由第一出射方向7
‑
e13转换为一第二出射方向7
‑
e23,第一出射方向7
‑
e13与第二出射方向7
‑
e23不平行。
[0198]
应注意的是,如图9a、图9b、图9c所示,在前述状态中的第二出射方向7
‑
e21、7
‑
e22、或7
‑
e23皆朝向相同的方向,即与主轴7
‑
o的方向平行。而镜片7
‑
340与第三电路元件7
‑
420(感光元件)沿着第二出射方向7
‑
e21、7
‑
e22、或7
‑
e23排列。第二出射方向7
‑
e21、7
‑
e22、或7
‑
e23与第一方向7
‑
d1不平行,且第二出射方向7
‑
e21、7
‑
e22、或7
‑
e23与第二方向7
‑
d2平行。由此,可允许通过第一光学模块7
‑
200来将外界的光线反射给第二光学模块7
‑
300,从而使第二光学模块7
‑
300可接收来自各方向上的图像。接着,可通过第三驱动组件7
‑
400对第一光学模块7
‑
200以及第二光学模块7
‑
300相对于主轴7
‑
o进行旋转,以使光学系统7
‑
1可捕捉更多方向上的图像。
[0199]
综上所述,本公开实施例提供一种光学系统,包括第一光学模块。第一光学模块包括第一固定部、第一活动部、第一驱动组件以及电路组件。第一活动部用以连接第一光学元件并可动地连接第一固定部。第一驱动组件用以驱动第一活动部相对第一固定部运动。电路组件电性连接第一驱动组件。由此,光学系统可在各个方向进行摄影,并且还可达成小型化。
[0200]
虽然本公开的实施例及其优点已经公开如上,但应该了解的是,本领域技术人员在不脱离本公开的精神和范围内,当可作更动、替代、与润饰。此外,本公开的保护范围并未局限于说明书内所述特定实施例中的工艺、机器、制造、物质组成、装置、方法及步骤,任何所属技术领域中技术人员当可从本公开内容中理解现行或未来所发展出的工艺、机器、制造、物质组成、装置、方法及步骤,只要可以在此处所述实施例中实施大抵相同功能或获得大抵上相同的结果皆可根据本公开使用。因此,本公开的保护范围包括上述工艺、机器、制造、物质组成、装置、方法及步骤。另外,每一权利要求构成个别的实施例,且本公开的保护范围也包括各个权利要求及实施例的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1