镜头驱动设备、相机模块和光学装置的制作方法
1.本实施例涉及一种镜头驱动设备、一种相机模块和一种光学装置。
背景技术:
2.由于难以将在现有的通用相机模块中使用的音圈马达(vcm)技术应用于超小尺寸和低功耗的相机模块,因此已经积极地进行了相关研究。
3.在诸如智能手机之类的小型电子产品上安装的相机模块的情况下,相机模块在使用过程中可能会经常受到撞击,并且在拍摄时,相机模块可能会随着用户的手抖动而轻微抖动。考虑到这一点,最近开发了一种用于在相机模块上附加安装防抖装置的技术。
4.同时,正在研究用于相机模块的根据被摄体的距离来自动调整焦点的自动对焦功能。另外,正在研究反馈功能以执行更准确的自动对焦功能。
5.然而,在具有自动对焦反馈功能的传统相机模块的情况下,由于用于检测镜头位置的配置导致相机模块的整体尺寸增大,所以存在以下问题:难以应用于其中用来安装相机模块的空间有限的智能手机。
技术实现要素:
6.技术主题
7.本发明的第一实施例提供了一种镜头驱动设备以及一种包括该镜头驱动设备的相机模块和光学装置,其能够:降低被安装在双相机模块上的两个相邻镜头驱动设备中所包括的磁体之间的磁场干扰;平衡x轴方向上的电磁力和y轴方向上的电磁力以执行ois功能;以及通过减轻ois移动部分的重量来降低电流消耗。
8.本发明的第二实施例提供了一种镜头驱动设备以及一种包括该镜头驱动设备的相机模块和光学装置,其能够:防止磁场干扰引起的af驱动故障;和通过使用感测线圈而非感测磁体向位置传感器提供磁场从而提高自动对焦的准确性。
9.本发明的第三实施例提供了一种包括以下结构的相机模块:与未配备自动对焦反馈功能的相机模块相比,该相机模块的整体尺寸的增大被最小化,并且容易进行用于使感测线圈导电的组装操作。
10.另外,提供了一种设置于相机模块上的镜头驱动设备。
11.技术方案
12.根据第一实施例的镜头驱动设备包括:基板;外壳,所述外壳被设置在所述基板上;骨架,所述骨架被设置在所述外壳内;感测线圈,所述感测线圈被设置在所述骨架上;第一磁体、第二磁体、第三磁体以及假代构件(dummy member),所述第一磁体、所述第二磁体、所述第三磁体以及所述假代构件被设置在所述外壳的不同侧部上;第一线圈,所述第一线圈包括第一线圈单元和第二线圈单元,所述第一线圈单元对应于所述第一磁体,所述第二线圈单元对应于所述第二磁体;以及第一位置传感器,所述第一位置传感器被设置在所述基板上并且对应于所述感测线圈,其中,所述第一磁体和所述第二磁体彼此相对定位,所述
第三磁体和所述假代构件彼此相对定位,并且其中,驱动信号被提供给所述感测线圈,并且所述第一位置传感器检测所述感测线圈的磁场强度并输出输出信号。
13.所述感测线圈可以在光轴方向上与所述第一位置传感器重叠。
14.所述骨架可以包括从外侧表面突出的突出部分,并且所述感测线圈可以耦接到所述骨架的突出部分。
15.所述感测线圈可以具有包括中心孔的环形状,并且所述感测线圈的中心孔可以平行于光轴。
16.所述感测线圈可以耦接到所述突出部分的下表面。
17.所述假代构件可以包括彼此间隔开的第一假代件和第二假代件,并且所述感测线圈的至少一部分可以设置在所述第一假代件与所述第二假代件之间。
18.所述镜头驱动设备可以包括:第二线圈,所述第二线圈包括第三线圈单元至第五线圈单元,所述第三线圈单元至所述第五线圈单元在所述光轴方向上对应于所述第一磁体至所述第三磁体;和第二位置传感器,所述第二位置传感器被设置在所述基板上并且包括第一传感器和第二传感器,所述第一传感器对应于第一磁体,所述第二传感器对应于第三磁体。
19.所述感测线圈可以在所述光轴方向上不与所述第三线圈单元至所述第五线圈单元重叠。
20.所述第一位置传感器可以是霍尔传感器、包括所述霍尔传感器的驱动器ic或隧道磁阻(tmr)传感器。
21.所述镜头驱动设备可以包括:弹性构件,所述弹性构件被耦接到所述骨架和所述外壳;和支撑构件,所述支撑构件连接所述弹性构件和所述基板。
22.根据另一实施例的镜头驱动设备包括:固定部分;af移动部分,所述af移动部分包括骨架,和ois移动部分,所述ois移动部分包括外壳;第一弹性部分,所述第一弹性部分用于相对于所述外壳支撑所述af移动部分;第二弹性部分,所述第二弹性部分用于相对于所述固定部分支撑所述ois移动部分;af线圈,所述af线圈被设置在所述骨架上;感测线圈,所述感测线圈被设置在所述骨架上;第一磁体和第二磁体,所述第一磁体和所述第二磁体被设置在所述外壳上并且被定位成彼此相对;第三磁体和假代构件,所述第三磁体和所述假代构件被设置在所述外壳上并且被定位成彼此相对;第一ois线圈单元至第三ois线圈单元,所述第一ois线圈单元至所述第三ois线圈单元在所述光轴方向上对应于所述第一磁体至所述第三磁体;af位置传感器,所述af位置传感器被设置在所述固定部分上并在所述光轴方向上对应于所述感测线圈;以及第一ois传感器和第二ois传感器,所述第一ois传感器被设置在所述固定部分上并且对应于所述第一磁体,所述第二ois传感器对应于所述第三磁体,其中,驱动信号被提供给所述感测线圈,并且其中,所述af位置传感器可以检测所述感测线圈的磁场强度并输出输出信号。
23.根据本发明的第二实施例的镜头驱动设备包括:底座;外壳,该外壳被设置在底座上;骨架,该骨架被设置在外壳内;线圈,该线圈被设置在骨架上;感测线圈,该感测线圈被设置在骨架上;以及位置传感器,该位置传感器被设置在底座上并且对应于感测线圈,其中,第一驱动信号被提供给感测线圈,并且其中,位置传感器检测感测线圈的磁场强度并且可以输出输出信号。
24.第二驱动信号被提供给线圈,并且所述骨架通过线圈与磁体之间的相互作用而在光轴方向上移动,其中,当骨架在光轴方向上移动时,第一驱动信号可以是具有恒定值的dc信号。
25.感测线圈可以在光轴方向上与位置传感器重叠。
26.线圈可以耦接到骨架的外侧表面,并且感测线圈可以被设置在线圈下方。
27.感测线圈可以具有包括中心孔的环形状,并且所述感测线圈的中心孔可以平行于光轴。
28.镜头驱动设备包括:端子部分,该端子部分被设置在底座上,其中,端子部分包括彼此间隔开的第一端子、第二端子、第三端子和第四端子,并且其中,位置传感器可以电连接到第一端子至第四端子。
29.镜头驱动设备包括耦接到骨架的下部和外壳的下部的下弹性构件,其中,下弹性构件包括第一弹性构件、第二弹性构件、第三弹性构件和第四弹性构件,其中,线圈电连接到第一弹性构件和第二弹性构件,并且其中,感测线圈可以电连接到第三弹性构件和第四弹性构件。
30.线圈与位置传感器之间的最短距离可以小于位置传感器与磁体之间的最短距离。
31.第一端子至第四端子被设置在底座中,其中,底座包括凹槽,该凹槽使第一端子至第四端子中的每个端子的一端露出,并且位置传感器被设置在该凹槽中,并且其中,第一端子至第四端子中的每个端子的另一端可以露出于底座的外侧表面。
32.该位置传感器可以是霍尔传感器、包括霍尔传感器的驱动器ic或隧道磁阻(tmr)传感器。
33.根据本发明的第三实施例的镜头驱动设备包括:盖,该盖包括上板和从上板延伸的侧板;骨架,该骨架被设置在盖内;底座,该底座被设置在骨架下方;第一线圈,该第一线圈被设置在骨架上;磁体,该磁体被设置在第一线圈与盖的侧板之间;弹性构件,该弹性构件连接到骨架;以及基板,该基板包括第二线圈并且该基板被设置在底座上,其中,基板被设置在底座的上表面上,并且其中,弹性构件可以包括外侧部,该外侧部被设置在基板的上表面上。
34.通过与第一线圈的相互作用,可以在第二线圈中产生感应电压。
35.弹性构件的外侧部可以通过粘合剂固定到基板的上表面。
36.弹性构件包括形成在外侧部中的孔,其中,基板包括形成在与外侧部中的所述孔相对应的位置处的孔,其中,底座包括凹槽,该凹槽形成在底座的上表面上,在对应于基板的所述孔的位置处,并且其中,粘合剂可以设置在外侧部的所述孔、基板的所述孔以及底座的所述凹槽的至少一部分中。
37.弹性构件包括形成在外侧部中的孔,其中,基板包括形成在与外侧部中的所述孔相对应的位置处的孔,其中,底座包括突起,该突起形成在底座的上表面上,在对应于基板的所述孔的位置处,并且其中,底座的突起可以插入到外侧部的所述孔和基板的所述孔中。
38.第二线圈可以形成为基板上的图案化线圈。
39.底座包括突出部分,该突出部分形成在底座的上表面上并且从底座的外侧表面延伸,其中,该突出部分包括:第一突出部分,该第一突出部分形成在底座的外侧表面的第一侧上;和第二突出部分,该第二突出部分形成在底座的外侧表面的与第一侧相反的第二侧
上,并且其中,基板可以包括本体部分,该本体部分被设置在第一突出部分和第二突出部分之间。
40.基板包括端子部分,该端子部分从本体部分向下延伸并且被设置在底座的外侧表面的第三侧上,其中,弹性构件包括:第一下弹性单元,该第一下弹性单元电连接到第一线圈的一端;和第二下弹性单元,该第二下弹性单元与第一下弹性单元间隔开并且电连接到第一线圈的另一端,其中,第一下弹性单元和第二下弹性单元中的每个下弹性单元均包括端子,并且其中,基板的端子部分可以被设置在第一下弹性单元的端子与第二下弹性单元的端子之间。
41.电路板包括端子部分,该端子部分从本体部分向下延伸并且被设置在底座的外侧表面的第三侧上,其中,弹性构件包括:第一下弹性单元,该第一下弹性单元电连接到第一线圈的一端;和第二下弹性单元,该第二下弹性单元与第一下弹性单元间隔开并且电连接到第一线圈的另一端,其中,第一下弹性单元和第二下弹性单元中的每个下弹性单元都电连接到基板,并且其中,基板的端子单元可以包括电连接到第一线圈的两个端子和电连接到第二线圈的两个端子。
42.骨架可以包括止挡件,该止挡件在光轴方向上与底座重叠并且从骨架的下表面突出,其中,基板可以包括形成在与止挡件对应的位置处的孔。
43.第二线圈的至少一部分可以在光轴方向上与第一线圈重叠。
44.基板的至少一部分可以在光轴方向上与磁体重叠。
45.根据本发明第三实施例的相机模块可以包括:印刷电路板;图像传感器,该图像传感器被设置在印刷电路板上;镜头驱动设备;以及镜头,该镜头耦接到镜头驱动设备的骨架,并且被设置在对应于图像传感器的位置处。
46.根据本发明第三实施例的光学装置可以包括相机模块。
47.根据本发明第三实施例的镜头驱动设备包括:盖,该盖包括上板和从上板延伸的侧板;骨架,该骨架被设置在盖内;底座,该底座被设置在骨架下方;第一线圈,该第一线圈被设置在骨架上;磁体,该磁体被设置在第一线圈与盖的侧板之间;弹性构件,该弹性构件连接到骨架;以及基板,该基板包括第二线圈并且被设置在底座上,其中,弹性构件包括耦接到骨架的内部(inner portion)、耦接到基板或底座的外侧部,以及连接所述内部与外侧部的连接部分,并且其中,基板可以被设置在弹性构件的外侧部与底座之间。
48.根据本发明第三实施例的镜头驱动设备包括:盖,该盖包括上板和从上板延伸的侧板;骨架,该骨架被设置在盖内;底座,该底座被设置在骨架下方;第一线圈,该第一线圈被设置在骨架上;磁体,该磁体被设置在第一线圈与盖的侧板之间;弹性构件,该弹性构件连接到骨架;以及基板,该基板包括第二线圈并且被设置在底座上,其中,弹性构件包括第一下弹性单元,该第一下弹性单元电连接到第一线圈的一端;和第二下弹性单元,该第二下弹性单元与第一下弹性单元间隔开并且电连接到第一线圈的另一端,并且其中,第一下弹性单元和第二下弹性单元中的每个下弹性单元可以电连接到基板。
49.有利效果
50.本发明的第一实施例能够:降低安装在双相机模块上的两个相邻镜头驱动设备中所包括的磁体之间的磁场干扰;平衡x轴方向上的电磁力和y轴方向上的电磁力以执行ois功能;以及通过减轻ois移动部分的重量来降低电流消耗。
51.本发明的第二实施例使用感测线圈而非感测磁体向位置传感器提供磁场,由此防止由于磁场干扰导致的af驱动故障并提高了自动对焦的准确性。
52.通过本发明的第三实施例,可以最小化具有自动对焦反馈功能的相机模块的尺寸。
53.另外,与使用感测线圈的其它比较例相比,存在不需要单独卷绕和组装感测线圈的优点。
54.另外,由于仅通过将带有感测线圈图案的fpcb的端子与印刷电路板导电来完成感测线圈的导电,因此存在不需要额外的焊接连接工艺的优点。
附图说明
55.图1是根据本发明的第一实施例的镜头驱动设备的分解图。
56.图2是去掉了盖构件的镜头驱动设备的透视图。
57.图3a是骨架、第一线圈单元、第二线圈单元以及感测线圈的分解透视图。
58.图3b是骨架、第一线圈单元、第二线圈单元以及感测线圈的组装透视图。
59.图4a是外壳、第一磁体至第三磁体以及假代构件的分解透视图。
60.图4b是外壳、第一磁体至第三磁体以及假代构件的组装透视图。
61.图5是上弹性构件的透视图。
62.图6是用于说明上弹性构件、支撑构件以及电路板之间的电连接关系的视图。
63.图7是第一磁体至第三磁体、假代构件、外壳、下弹性构件以及感测线圈的仰视图。
64.图8是第二线圈、电路板以及底座的分解透视图。
65.图9是沿图2的方向ab截取的镜头驱动设备的剖视图。
66.图10是沿图2的方向cd截取的镜头驱动设备的剖视图。
67.图11是沿图2的方向ef截取的镜头驱动设备的剖视图。
68.图12是示出第一位置传感器、感测线圈、第一磁体至第三磁体、假代构件以及第三线圈单元至第五线圈单元的透视图。
69.图13是第一位置传感器、感测线圈、第一磁体至第三磁体、假代构件、第三线圈单元至第五线圈单元以及第一传感器和第二传感器的透视图。
70.图14是图12中所示的构造的仰视图。
71.图15a示出了用于模拟的感测线圈和第一位置传感器的设置。
72.图15b示出了图15a的感测线圈根据af移动部分在光轴方向上的移动的位置变化。
73.图15c示出了由第一位置传感器根据图15b的感测线圈的位置变化而检测到的感测线圈的磁场强度的变化。
74.图16示出了镜头驱动设备的另一实施例。
75.图17是根据本发明的第一实施例的相机模块的分解透视图。
76.图18是根据另一实施例的相机模块的透视图。
77.图19a示出了图18的双相机模块的实施例。
78.图19b示出了图18的双相机模块的另一实施例。
79.图20a示出了图18的双相机模块的又一实施例。
80.图20b示出了图18的双相机模块的又一实施例。
81.图20c示出了图18的双相机模块的又一实施例。
82.图21是根据本发明的第一实施例的便携式终端的透视图。
83.图22是图21中所示的便携式终端的框图。
84.图23是根据本发明的第二实施例的镜头驱动设备的分解图。
85.图24是去掉了盖构件的镜头驱动设备的透视图。
86.图25a是骨架的第一透视图。
87.图25b是骨架的第二透视图,并且图25c是骨架和线圈的组装透视图。
88.图26a是外壳的透视图。
89.图26b是外壳和磁体的第一透视图。
90.图26c是外壳和磁体的第二透视图。
91.图27是外壳、磁体和上弹性构件的透视图。
92.图28是下弹性构件、位置传感器、端子部分以及底座的分解透视图。
93.图29是与位置传感器和端子部分耦接的底座的透视图。
94.图30是下弹性构件、端子部分以及底座的组合透视图。
95.图31是沿图24的方向ab截取的镜头驱动设备的剖视图。
96.图32是沿图24的方向cd截取的镜头驱动设备的剖视图。
97.图33a示出了线圈、磁体单元、感测线圈以及位置传感器的设置。
98.图33b示出了图33a的仰视图。
99.图34示出了骨架的位移、被施加于线圈的第一驱动信号以及被施加于感测线圈的第二驱动信号之间的关系。
100.图35a示出了用于模拟的感测线圈和位置传感器的设置。
101.图35b示出了图35a的感测线圈的、根据af移动部分在光轴方向上的移动的位置变化。
102.图35c示出了由位置传感器根据图35b的感测线圈的位置变化而感测到的感测线圈的磁场强度的变化。
103.图36示出了根据另一示例性实施例的线圈、磁体单元、感测线圈以及位置传感器的设置。
104.图37是示出了使用感测磁体的镜头驱动设备中的感测磁体和驱动磁体各自的磁场分布的视图。
105.图38是根据另一示例性实施例的镜头驱动设备的分解图。
106.图39示出了图38的线圈、磁体单元以及位置传感器的设置。
107.图40是沿图24的方向ab截取的、图38的镜头驱动设备的剖视图。
108.图41示出了被提供给图38的线圈的驱动信号的示例。
109.图42示出了根据另一实施例的磁体单元、线圈和位置传感器的设置。
110.图43是根据本发明的第二实施例的相机模块的分解透视图。
111.图44是根据本发明的第二实施例的便携式终端的透视图。
112.图45是图44中所示的便携式终端的框图。
113.图46是根据本发明的第三实施例的镜头驱动设备的透视图。
114.图47是沿图46的线a-a截取的剖视图。
115.图48是沿图46的线b-b截取的剖视图。
116.图49是沿图46的线c-c截取的剖视图。
117.图50是根据本发明的第三实施例的镜头驱动设备的仰视图。
118.图51是其中在图46中移除了盖的状态的透视图。
119.图52是根据本发明的第三实施例的镜头驱动设备的分解透视图。
120.图53是从与图52不同的方向观察的、根据本发明的第三实施例的镜头驱动设备的分解透视图。
121.图54是示出根据本发明的第三实施例的动子和定子的分解透视图。
122.图55是示出根据本发明的第三实施例的底座、弹性构件以及基板的分解透视图。
123.图56是从与图55不同的方向观察的、根据本发明的第三实施例的构造的一部分的分解透视图。
124.图57a是示出了根据本发明的第三实施例的底座与基板之间的耦接状态的透视图。
125.图57b是示出了根据变型例的底座与基板之间的耦接状态的透视图。
126.图58是示出了下弹性构件另外耦接到图57a的状态的透视图。
127.图59是根据本发明的第三实施例的镜头驱动设备的一部分的截面透视图。
128.图60是根据本发明的第三实施例的相机模块的分解透视图。
129.图61是根据本发明的第三实施例的光学装置的透视图。
130.图62是根据本发明的第三实施例的光学装置的框图。
具体实施方式
131.下面将参考附图详细描述本发明的优选实施例。
132.然而,本发明的技术思想不限于将要描述的一些实施例,而是可以以各种形式实施,并且在本发明的技术思想的范围内,可以在实施例之间选择性地组合或替换一个或多个构成要素。
133.另外,除非明确定义和描述,否则本发明的实施例中使用的术语(包括技术术语和科学术语)均可以被解释为本领域技术人员通常可能理解的含义,并且诸如字典中定义的术语之类的常用术语可以考虑相关技术背景的含义来解释。
134.另外,在本说明书中使用的术语是为了描述实施例,并非旨在限制本发明。在本说明书中,除非在短语中特别说明,否则单数形式可以包括复数形式,并且当被描述为“a和b和c中的至少一个(或超过一个)”时,可能包括可以用a、b和c组合的所有组合中的一个或多个。
135.另外,在描述本发明实施例的组件时,可能使用诸如第一、第二、a、b、(a)和(b)之类的术语。这些术语仅旨在将组件与其它组件区分开来,并且这些术语并非限制组件的性质、顺序或序列。
136.并且,当一个组件被描述为与另一组件
‘
连接’、
‘
耦接’或
‘
互连’时,该组件不仅与该另一组件直接连接、耦接或互连,还可能包括因为与该另一组件之间的另一组件而
‘
连接’、
‘
耦接’或
‘
互连’的情况。另外,当被描述为形成或设置在每个组件“上(之上)”或“下(之下)”时,“上(之上)”或“下(之下)”意味着不仅包括其中两个组件直接接触的情况,而且
也包括其中一个或多个其它组件形成或设置在这两个组件之间的情况。另外,在被表述为“上(之上)”或“下(之下)”时,不仅可以包含基于一个组件向上方向的意思,还可以包含基于一个组件向下方向的意思。
137.下文中的镜头驱动设备可以表述成被替换为镜头驱动单元、音圈马达(vcm)、致动器或镜头移动设备等,并且下文中的术语“线圈”可以表述成被替换为线圈单元,并且术语“弹性构件”可以表述成被替换为弹性单元或弹簧。
138.另外,在下文的说明中,术语“端子”可以表述成被替换为焊盘、电极、导电层或结合部分等。
139.为了便于描述,使用笛卡尔坐标系(x,y,z)来描述根据实施例的镜头驱动设备,但也可以使用其它坐标系进行描述,并且本实施例不限于此。在每个图中,x轴和y轴是指与作为光轴方向的z轴垂直的方向,作为光轴(oa)方向的z轴方向被称为
‘
第一方向’,x轴方向被称为
‘
第二方向’,y轴方向可以被称为
‘
第三方向’。
140.根据实施例的镜头驱动设备可以执行
‘
自动对焦功能’。这里,自动对焦功能是指将被摄体的图像自动对焦在图像传感器表面上。
141.另外,根据实施例的镜头驱动设备可以执行
‘
手抖动校正功能’。这里,手抖动校正功能是指可以防止由于在拍摄静止图像期间用户的手抖动而引起的振动从而不能清楚地形成所拍摄图像的轮廓的功能。
142.图1是根据本发明的第一实施例的镜头驱动设备100的分解图,图2是去掉了盖构件300的镜头驱动设备100的透视图。
143.参考图1和图2,镜头驱动设备100可以包括:骨架110、第一线圈120、第一磁体130-1、第二磁体130-2和第三磁体130-3、假代构件135、外壳140、上弹性构件150、下弹性构件160、第一位置传感器170、感测线圈180以及第二线圈230。
144.镜头驱动设备100可以还包括底座210、电路板250和支撑构件220中的至少一个。
145.另外,镜头驱动设备100可以还包括平衡线圈(未示出),用于减小感测线圈180的重量或减弱磁场的影响。
146.另外,镜头驱动设备100可以还包括第二位置传感器240,用于驱动光学图像稳定器(ois)反馈。另外,镜头驱动设备100可以还包括盖构件300。
147.本实施例可以提供一种包括ois功能的镜头驱动设备,ois功能能够减小或抑制被包括在安装于双相机模块上的两个相邻镜头驱动设备中的磁体之间的磁场干扰。
148.另外,本实施例可以平衡在x轴方向上产生的电磁力和在y轴方向上产生的电磁力,以执行ois功能。
149.另外,本实施例减少了用于ois的磁体的数目,减小了用于ois的磁体的尺寸,并减轻了ois移动部分的重量,由此减少了电流消耗。
150.首先,将描述骨架110。
151.骨架110被设置在外壳140的内侧,并且该骨架110可以通过第一线圈120与第一磁体130-1和第二磁体130-2之间的电磁相互作用而在光轴oa方向上或在第一方向(例如,z轴方向)上移动。
152.图3a是骨架110、第一线圈单元120-1、第二线圈单元120-2和感测线圈180的分解透视图,而图3b是骨架110、第一线圈单元120-1、第二线圈单元120-2和感测线圈180的组装
透视图。
153.参考图3a和图3b,骨架110可以具有用于安装镜头或镜筒的开口。例如,骨架110的开口可以是贯穿骨架110的通孔的形式,骨架110的开口可以具有圆形形状、卵形形状或多边形形状,但其不限于此。
154.镜头可以直接安装在骨架110的开口中,但不限于此,在另一实施例中,安装或耦接有至少一个镜头的镜筒可以耦接或安装到骨架110的开口。该镜头或镜筒可以以各种方式耦接到骨架110的内周表面。
155.骨架110可以包括彼此间隔开的多个侧部,并且所述多个侧部可以彼此连接。
156.例如,骨架110可以包括:侧部,这些侧部对应于外壳140的侧部141-1至141-4;和拐角部(或拐角),这些拐角部(或拐角)对应于外壳140的拐角部142-1至142-4。
157.在骨架110的侧部中的彼此相对定位的两个侧部中,可以提供用于设置、安装或安放第一线圈单元120-1和第二线圈单元120-2的安放凹槽201。
158.例如,安放凹槽201可以形成在骨架110的彼此相对定位的第一外侧表面和第二外侧表面上。安放凹槽201可以具有从骨架110的第一外侧表面和第二外侧表面凹进的结构,并且可以具有与第一线圈单元120-1和第二线圈单元120-2的形状相匹配的形状。
159.在骨架110的彼此相对定位的第一外侧表面和第二外侧表面中的每一个上,可以设置有用于分别与第一线圈单元120-1和第二线圈单元120-2中的对应一个线圈单元耦接的突起25。
160.例如,用于安装或缠绕第一线圈单元120-1的第一突起可以形成在骨架110的第一外侧表面上,而用于安装或缠绕第二线圈单元120-2的第二突起可以形成在骨架110的第二外侧表面上。例如,突起25可以从安放凹槽201的底表面突出。
161.在不是骨架110的第一外侧表面和第二外侧表面的骨架110的其它一个外侧表面(例如,第四外侧表面)上,可以设置有突出部分116。用于安装或设置感测线圈180的突起26可以形成在突出部分116上。
162.突出部分116可以在垂直于光轴的方向上从骨架110的侧部的外侧表面(例如,第四外侧表面)突出。例如,突出部分116可以在与穿过骨架110的开口中心并且垂直于光轴方向的直线平行的方向上突出。
163.例如,突起26可以从突出部分116的下表面向下突出或者在朝向第一位置传感器170的方向上突出。
164.另外,骨架110可以还包括形成于骨架110的另一侧部(或第三外侧表面)上的突起,以用于安装或设置平衡线圈。在这种情况下,骨架110的第三外侧表面可以是与骨架110的第四外侧表面相对定位的外侧表面。
165.突出部分111可以形成在骨架110的拐角部处。骨架110的突出部分111穿过骨架110的开口中心并且可以在与垂直于光轴方向的直线平行的方向上突出,但其不限于此。
166.骨架110的突出部分111对应于外壳140的凹槽部145,并且可以被插入或设置在外壳140的凹槽部145中,并且可以抑制或防止骨架110绕光轴移动或旋转超过特定范围。
167.用于避免与上弹性构件150的第一框架连接部分153发生空间干涉的第一避让凹槽122a可以设置在骨架110的上表面上,并且,用于避免与下弹性构件150的第二框架连接部分163发生空间干涉的第二避让凹槽122b可以设置在骨架110的下表面上。例如,第一避
让凹槽122a和第二避让凹槽122b可以形成在骨架110的拐角部中,但其不限于此。在另一实施例中,第一避让凹槽122a和第二避让凹槽122b可以形成在骨架110的侧部中。
168.虽然图3a和图3b中未示出,但是骨架110可以包括从上表面突出的第一止挡件和从下表面突出的第二止挡件。当骨架110在第一方向上移动以实现自动对焦功能时,骨架110的第一止挡件和第二止挡件可以防止骨架110的上表面与盖构件300的上板的内侧直接碰撞,即使骨架110由于外部冲击而移动超出规定范围也是如此,并且可以防止骨架110的下表面与底座210、第二线圈230和/或电路板250直接碰撞。
169.用于耦接和固定到上弹性构件150的第一耦接部分可以设置在骨架110的上表面上,并且,用于耦接和固定到下弹性构件160的第二耦接部分可以设置在骨架110的下表面上。
170.例如,在图3a和图3b中,骨架110的第一耦接部分和第二耦接部分可以具有平面形状,但其不限于此,在另一实施例中,骨架110的第一耦接部分和第二耦接部分可以具有凹槽形状或突起形状。
171.在骨架110的内周表面上可以设置有用于与镜头或镜筒耦接的螺纹。在骨架110被夹具等固定的状态下,可以在骨架110的内周表面上形成螺纹,并且,用于固定夹具的凹槽19可以设置在骨架110的上表面上。
172.接下来,将描述第一线圈120。
173.第一线圈120包括设置在骨架110的侧部中的彼此相对定位的两个侧部上的第一线圈单元120-1和第二线圈单元120-2。
174.这里,“线圈单元”可以表述成被替换为线圈部分、线圈块或线圈环。
175.例如,第一线圈单元120-1可以设置在骨架110的与外壳140的第一侧部141-1相对应的第一侧部上,并且第二线圈单元120-2可以设置在骨架110的与外壳140的第二侧部141-2相对应的第二侧部上。
176.第一线圈单元120-1和第二线圈单元120-2可以设置在骨架110的安放凹槽201中。第一线圈单元120-1和第二线圈单元120-2可以耦接到骨架110的突起25或缠绕在突起25上。
177.第一线圈单元120-1和第二线圈单元120-2中的每一个可以包括圆形形状、椭圆形状和闭合曲线形状中的至少一种。例如,第一线圈单元120-1和第二线圈单元120-2中的每一个穿过骨架110的开口的中心并且可以具有围绕垂直于光轴的轴线缠绕的线圈环形状。
178.例如,第一线圈单元120-1和第二线圈单元120-2中的每一个可以包括中心孔,并且该中心孔可以面对骨架110的设置有第一线圈单元120-1和第二线圈单元120-2的外侧表面,并且可以耦接到突起25。
179.例如,第一线圈单元120-1和第二线圈单元120-2中的每一个可以包括第一部3a、设置在第一部3a下方的第二部3b、以及将第一部3a和第二部3b彼此连接的连接部3c,并且第一部3a至第三部3c可以形成闭合曲线。
180.第三部3c可以包括:第一连接部3c1,该第一连接部连接第一部3a的一端和第二部3b的一端;和第二连接部3c2,该第二连接部连接第一部3a的另一端和第二部3b的另一端。
181.第一线圈120被设置在第一线圈单元120-1和第二线圈单元120-2之间,并且可以包括用于将第一线圈单元120-1和第二线圈单元120-2彼此连接的连接部分(未示出)或连
接线圈。
182.第一线圈120的连接部分的一端可以连接到第一线圈单元120-1的一端,并且第一线圈120的连接部分的另一端可以连接到第二线圈单元120-2的一端。也就是说,第一线圈单元120-1和第二线圈单元120-2可以通过第一线圈120的连接部分串联连接,并且可以向第一线圈120提供一个驱动信号。
183.例如,第一线圈120的连接部分可以面对第三磁体130-1,并且可以设置在第三磁体130-1与骨架110之间。
184.根据另一实施例,第一线圈120的连接部分可以面对假代构件135,并且可以设置在假代构件135与骨架110之间。
185.在另一实施例中,第一线圈单元120-1和第二线圈单元120-2可以彼此分离或间隔开,并且可以向第一线圈单元120-1和第二线圈单元120-2中的每一个提供单独的驱动信号。
186.可以向第一线圈120提供电力或驱动信号。
187.被提供给第一线圈120的电力或驱动信号可以是dc信号或ac信号,或者可以包括dc信号和ac信号,并且可以是电压或电流的形式。
188.当向第一线圈120供应驱动信号(例如,驱动电流)时,可以通过第一线圈120与第一磁体130-1和第二磁体130-2之间的电磁相互作用而形成电磁力,并且骨架110可以通过所产生的电磁力在光轴oa方向上移动。
189.在af移动部分的初始位置,骨架110可以在向上方向上或在向下方向(例如,z轴方向)上移动,这被称为af移动部分的双向驱动。或者,在af移动部分的初始位置,骨架110可以向上移动,这被称为af移动部分的单向驱动。
190.af移动部分可以包括骨架110和耦接到骨架110的组件。例如,af移动部分可以包括骨架110、第一线圈120、感测线圈180和/或平衡磁体。另外,af移动部分可以还包括安装在骨架110上的镜头。
191.并且,af移动部分的初始位置是在未向第一线圈120施加电力的状态下的af移动部分的初始位置,或者可以是在上弹性构件150和下弹性构件160仅因为af移动部分的重量弹性变形时、af移动部分被放置的位置。
192.另外,骨架110的初始位置是当重力在从骨架110到底座210的方向上作用时、af移动部分被放置的位置,或者相反地,该初始位置可以是当重力在从底座210到骨架110的方向上作用时、af移动部分被放置的位置。
193.在af移动部分的初始位置处,第一线圈单元120-1可以在垂直于光轴的方向上和在从光轴朝向第一线圈单元120-1(或第一线圈单元120-1的中心)的方向上面对第一磁体130-1或与第一磁体130-1重叠,但不面对第三磁体130-3或与第三磁体130-3重叠。
194.在af移动部分的初始位置处,第二线圈单元120-2可以在垂直于光轴的方向上、在从光轴朝向第二线圈单元120(或第二线圈单元120-2的中心)的方向上面对第二磁体130-2或与第二磁体130-2重叠,但不面对第三磁体130-3或与第三磁体130-3重叠。
195.接下来,将描述感测线圈180。
196.感测线圈180可以设置在骨架110中的侧部中的未设置有第一线圈单元120-1和第二线圈单元120-2的任一个侧部上。例如,感测线圈180可以设置在骨架110的突出部分116
上,并且可以耦接到突起26或缠绕在突起26上。
197.当镜头驱动设备100包括平衡感测线圈时,该平衡感测线圈可以设置在骨架110中的侧部中的未设置有第一线圈单元120-1和第二线圈单元120-2的任一个侧部处。例如,该平衡感测线圈可以耦接到或缠绕在形成于骨架110的其它侧部上的突起上。
198.平衡感测线圈可以是这样一种线圈:它用于抵消感测线圈180的磁场的影响并且平衡感测线圈180的重量,由此执行准确的af操作。
199.感测线圈180可以向第一位置传感器170提供由第一位置传感器170感测的磁场。感测线圈180可以被提供有驱动信号或电力以产生磁场。提供给感测线圈180的驱动信号可以包括直流信号和交流信号中的至少一种。另外,该驱动信号可以是电流或电压的形式。
200.感测线圈180可以包括圆形形状、椭圆形状和闭合曲线形状中的至少一种。例如,感测线圈180可以具有绕平行于光轴的轴线旋转的线圈环形状。
201.例如,感测线圈180可以包括中心孔,并且该中心孔可以平行于光轴。或者,感测线圈180的中心孔可以面对骨架110的突出部分116的其上设置有感测线圈180的下表面,并且该中心孔可以耦接到突起26。
202.例如,感测线圈180可以包括:第一部4a;第二部4b,该第二部被设置在第一部4a下方;以及连接部4c,该连接部将第一部4a和第二部4b彼此连接,其中,第一部4a至第三部4c可以形成闭合曲线。
203.第三部4c可以包括连接第一部4a的一端和第二部4b的一端的第一连接部4c1、以及连接第一部4a的另一端和第二部4b的另一端的第二连接部4c2。
204.例如,第一部3a或4a可以被表述为“第一直线部”,第二部3b或4b可以被表述为“第二直线部”,第三部3c或4c可以被表述为“曲线部”,第一连接部3c1或4c1可以被表述为“第一曲线部”,第二连接部3c2或4c2可以被表述为“第二曲线部”。
205.通过第一线圈单元120-1与第一磁体130-1之间的相互作用以及第二线圈单元120-2与第二磁体130-2之间的相互作用,感测线圈180可以与骨架110一起在光轴oa方向上移动,并且第一位置传感器170可以检测在光轴方向上移动的感测线圈180的磁场强度,并且可以根据检测结果输出输出信号。
206.例如,相机模块的控制单元830或终端的控制单元780可以基于第一位置传感器170输出的输出信号来检测骨架110在光轴方向上的位移。
207.接下来,将描述外壳140。
208.外壳140将骨架110的至少一部分容纳在其内部,并支撑第一磁体130-1、第二磁体130-2、第三磁体130-3以及假代构件135。
209.图4a是外壳140、第一磁体130-1至第三磁体130-3以及假代构件135的分解透视图,并且图4b是外壳140、第一磁体130-1至第三磁体130-3以及假代构件135的组装透视图。
210.参考图4a和图4b,外壳140可以设置在盖构件300内部,并且可以设置在盖构件300与骨架110之间。外壳140可以在内部容纳骨架110。外壳140的外侧表面可以与盖构件300的侧板302的内表面间隔开。
211.外壳140可以是包括开口或中空部的中空柱的形状。
212.例如,外壳140可以具有多边形(例如,正方形或八边形)或圆形开口,并且外壳140的开口可以是在光轴方向上贯穿外壳140的通孔的形式。
213.外壳140可以包括多个侧部141-1至141-4和多个拐角部142-1至142-4。
214.例如,外壳140可以包括第一侧部141-1至第四侧部141-4和第一拐角部142-1至第四拐角部142-4。
215.第一侧部141-1至第四侧部141-4可以彼此间隔开。外壳140的拐角部142-1至142-4中的每一个拐角部可以设置或定位两个相邻的侧部141-1和141-3、141-1和141-4、141-4和141-2、141-2和141-3,并且可以将侧部141-1至141-4彼此连接。
216.例如,拐角部142-1至142-4可以位于拐角处或外壳140的拐角处。例如,外壳140的侧部的数目为四个,拐角部的数目为四个,但其不限于此。
217.外壳140的侧部141-1至141-4中的每一个侧部可以设置成平行于盖构件300的任一个对应的侧板。
218.外壳140的每个侧部141-1至141-4在水平方向上的长度可以大于每个拐角部142-1至142-4在水平方向上的长度,但其不限于此。
219.外壳140的第一侧部141-2和第二侧部141-2可以彼此相对定位,第三侧部141-3和第四侧部141-4可以彼此相对定位。外壳140的第三侧部141-3和第四侧部141-4中的每一个可以被定位在第一侧部141-2和第二侧部141-2之间。
220.为了防止与盖构件300的上板301的内侧表面直接碰撞,可以在外壳140的上部、上端或上表面上设置有止挡件144。
221.例如,止挡件144可以设置在外壳140的拐角部142-1至142-4中的每个拐角部的上表面(例如,第一表面51a)上,但其不限于此。
222.在外壳140的上部、上端或上表面中,可以设置有耦接到上弹性构件150的第一外框架152的至少一个第一耦接部分。另外,在外壳140的下部、下端或下表面中,可以设置有耦接到并固定到下弹性构件160的第二外侧框架162的至少一个第二耦接部分。
223.外壳140的第一耦接部分和第二耦接部分中的每个耦接部分可以是平坦表面、凹槽或突起中的任一种。
224.外壳140的第一耦接部分和上弹性构件150的第一外侧框架152可以使用热熔或粘合剂彼此耦接,并且外壳140的第二耦接部分和下弹性构件160的第二外侧框架162可以彼此耦接。
225.外壳140可以包括:第一安放部141a,该第一安放部被设置在彼此相对定位的两个侧部中的任一个侧部上,例如第一磁体130-1将被设置在其中的第一侧部141-1上;和第二安放部141b,该第二安放部被设置在所述两个侧部中的、第二磁体130-2将被设置在其中的另一个侧部141-2上。
226.另外,外壳140可以包括:第三安放部141c,该第三安放部被设置在彼此相对定位的其它两个侧部中的任一个侧部上,例如第三磁体130-3将被设置在其中的第三侧部141-3上;和第四安放部141d,该第四安放部被设置在所述其它两个侧部中的、骨架110的突出部分116将被设置在其中的其它一个侧部141-4上。
227.例如,感测线圈180的至少一部分可以设置在外壳140的第四安放部141d上。
228.外壳140的第一安放部141a至第三安放部141c中的每一个可以设置在外壳140的任一个侧部的内侧表面上,但其不限于此,而是可以设置在外侧表面上。
229.外壳140的第一安放部141a至第三安放部141c中的每一个可以形成为对应于第一
磁体130-1至第三磁体130-3中的任一个磁体,或者形成为具有匹配形状的凹槽,例如沟形凹槽,但其不限于此。
230.例如,外壳140的第一安放部141a(或第二安放部141b)可以形成有面对第一线圈单元120-1(或第二线圈单元)的第一开口,并且可以形成有面对第三线圈单元230-1(或第四线圈单元230-2)的第二开口,这是为了便于磁体130的安装。
231.面向骨架110的外侧表面的第一开口和面向第五线圈单元230-3的第二开口可以形成在外壳140的第三安放部141c中。
232.另外,外壳140的第四安放部141d可以形成为对应于骨架110的突出部分116或形成为具有匹配形状的凹槽,例如沟形凹槽,但其不限于此,并且在另一实施例中,第四安放部可以是贯穿外壳140的侧部的通孔的形式。
233.外壳140的第四安放部141d可以包括通向外壳140的第四侧部141-4的内侧表面的第一开口和通向外壳140的第四侧部141-4的下表面的第二开口。
234.例如,被固定到或设置在外壳140的第一安放部至第三安放部141a、141b和141c的第一磁体至第三磁体130-1、130-2、130-3的一侧可以通过安放部141a、141b和141c的第一开口露出。另外,被固定到或设置在外壳140的第一安放部至第三安放部141a、141b和141c的第一磁体至第三磁体130-1、130-2、130-3的下表面可以通过安放部141a、141b和141c的第二开口露出。
235.被设置在外壳140的第四安放部141d上的感测线圈180的至少一部分可以通过外壳140的第四侧部141-4的第二开口露出。
236.例如,感测线圈180的下部或下表面的至少一部分可以通过外壳140的第四侧部的第二开口露出,并且可以在光轴方向上与第一位置传感器170面对或重叠。
237.例如,感测线圈180的第一直线部4a和第二直线部4b中的至少一个可以在光轴方向上与第一位置传感器170重叠。或者,感测线圈180的中心孔的至少一部分可以在光轴方向上与第一位置传感器170重叠。
238.用于布置假代构件135的安放凹槽41和42可以设置在外壳140的第四侧部141-4中。例如,在外壳140的第四侧部141-4中,可以形成有用于布置第一假代件135a的第一安放凹槽41和用于布置第二假代件135b的第二安放凹槽42。第一安放凹槽41和第二安放凹槽42中的每一个可以为从外壳140的第四侧部141-4的下表面凹进的形式,但其不限于此。
239.第四安放部141d可以布置在外壳140的第一安放凹槽41和第二安放凹槽42之间,但其不限于此。
240.例如,第一磁体130-1至第三磁体130-3可以通过粘合剂附接到或固定到第一安放部141a至第三安放部141c。另外,假代构件135可以通过粘合剂附接或固定在外壳140的安放凹槽41和42内。
241.支撑构件220-1至220-4可以设置在外壳140的拐角部142-1至142-4上,拐角部142-1至142-4可以设置有孔147,该孔147形成支撑构件220-1至220-4所穿过的路径。
242.例如,外壳140可以包括穿过拐角部142-1至142-4的上部的孔147。
243.在另一实施例中,设置在外壳140的拐角部142-1至142-4中的孔可以是从外壳140的拐角部的外侧表面凹进的结构,并且该孔的至少一部分可以通向拐角部的外侧表面。外壳140的孔147的数目可以与支撑构件的数目相同。
244.外壳140可以包括从侧部141-1至141-4的外侧表面突出的至少一个止挡件(未示出),并且所述至少一个止挡件可以在外壳140在垂直于光轴方向的方向上移动时防止外壳140与盖构件300碰撞。
245.为了防止外壳140的下表面与底座210和/或电路板250碰撞,外壳140还可以包括从下表面突出的止挡件(未示出)。
246.外壳140可以设置有凹槽148,该凹槽148被设置在拐角部142-1至142-4的下部中或下端处,从而不仅确保支撑构件220-1至220-4所穿过的路径,而且确保可以提供用来填充可以起到减震作用的硅树脂的空间。
247.接下来,将描述第一磁体130-1、第二磁体130-2、第三磁体130-3和假代构件135。
248.第一磁体130-1、第二磁体130-2和第三磁体130-3可以彼此间隔开并且被设置在外壳140中。例如,第一磁体130-1至第三磁体130-3中的每一个可以设置在骨架110与外壳140之间。
249.第一磁体130-1、第二磁体130-2和第三磁体130-3可以设置在外壳140的侧部上。
250.第一磁体130-1和第二磁体130-2可以设置在外壳140的侧部141-1至141-4中的彼此相对定位的任两个侧部141-1和141-2中。
251.另外,第三磁体130-3和假代构件135可以设置在外壳140的侧部141-1至141-4中的彼此相对定位的任何其它两个侧部141-3和141-4中。
252.例如,第一磁体130-1可以设置在外壳140的第一侧部141-1上,并且第二磁体130-2可以设置在外壳140的面对第一侧部141-1的第二侧部141-2上。
253.第三磁体130-3可以设置在外壳140的第三侧部141-3上,并且假代构件135可以设置在外壳140的面对第三侧部141-3的第四侧部141-4上。
254.由于用于af驱动的第一线圈单元120-1和第二线圈单元120-2被设置在骨架110的彼此面对的两个侧部上,因此在骨架110与第三磁体130-3之间没有设置用于af驱动的线圈单元。另外,用于af驱动的线圈单元没有设置在骨架110与假代构件135之间。
255.另外,对于ois驱动,由于第三线圈单元230-1至第五线圈单元230-3与第一磁体130-1至第三磁体130-3彼此对应,所以用于ois驱动的第二线圈230未设置在假代构件135与电路板250之间。
256.例如,第一磁体130-1可以包括面对第一线圈单元120-1的第一表面,并且第一磁体130-1的第一表面可以包括n极和s极两个极性以及位于所述两个极性之间的第一非磁性分隔壁11c。
257.例如,第一磁体130-1可以包括面对第三线圈单元230-1的第二表面,并且第一磁体130-1的第二表面可以包括n极和s极两个极性。
258.例如,第二磁体130-2可以包括面对第二线圈单元120-2的第一表面,并且第二磁体130-2的第一表面可以包括n极和s极两个极性以及位于所述两个极性之间的第二非磁性分隔壁12c。
259.例如,第二磁体130-2可以包括面对第四线圈单元230-2的第二表面,并且第二磁体130-2的第二表面可以包括n极和s极两个极性。
260.例如,第三磁体130-3可以包括第一表面,该第一表面与骨架110的面对外壳140的第三侧部141-3的侧部相对,其中在该第三侧部141-3的侧部上设置有第三磁体130,并且第
三磁体130-3的第一表面可以包括n极或s极中的一个极性。
261.例如,第三磁体130-3可以包括面对第五线圈单元230-3的第二表面,并且第三磁体130-3的第二表面可以具有n极和s极两个极性。
262.在另一实施例中,第三磁体130-3可以是双极磁化磁体。在另一实施例中,第一磁体130-1至第三磁体130-3中的至少一个可以是单极磁化磁体或双极磁化磁体。
263.在af移动部分的初始位置处,第一磁体130-1可以在垂直于光轴oa并且在从光轴oa朝向第一线圈单元120-1(或第一线圈单元120-1的中心)的方向上与第一线圈单元120-1重叠。
264.在af移动部分的初始位置处,第二磁体130-2可以在垂直于光轴oa并且在从光轴oa朝向第二线圈单元120-2(或第二线圈单元120-2的中心)的方向上与第二线圈单元120-2重叠。
265.在af移动部分的初始位置处,第三磁体130-3在垂直于光轴oa的方向上并且在从外壳140的第三侧部141-3朝向第四侧部141-4的方向上不面对第一线圈单元120-1和第二线圈单元120-2或不与第一线圈单元120-1和第二线圈单元120-2重叠。
266.例如,第一磁体130-1至第三磁体130-3中的每一个可以设置在外壳140的第一安放部141a至第三安放部141c中的对应一个安放部上。
267.第一磁体130-1可以在垂直于光轴并且在从外壳140的第一侧部141-1指向第二侧部141-2的方向上与第二磁体130-2重叠。
268.第一磁体130-1至第三磁体130-3中的每一个的形状可以是易于安放或设置在外壳140的第一侧部141-1至第三侧部141-3中的任一个对应侧部上的多面体形状,例如长方体。例如,第一磁体130-1至第三磁体130-3中的每一个可以具有平板形状,但其不限于此。
269.例如,第一磁体130-1和第二磁体130-2中的每一个可以是包括两个n极和两个s极的4极磁体,第三磁体130-3可以是包括一个n极和一个s极的双极磁体。这里,有时将4极磁体表述为“双极磁化磁体”,将双极磁体表述为“单极磁化磁体”。下文将描述第一磁体130-1至第三磁体130-3。
270.在另一实施例中,第一磁体至第三磁体中的至少一个可以是双极磁体。或者,第一磁体至第三磁体中的至少一个可以是四极磁体。
271.假代构件135可以设置在外壳140的第四侧部141-4上。假代构件135可以是非磁性材料或非磁性材料,但其不限于此,并且在另一实施例中可以包括磁性材料。
272.假代构件135可以具有与第三磁体130-3相同的质量,但其不限于此。假代构件135可以设置在外壳140的与设置有第三磁体130-3的侧部141-3相对的侧部141-4上,以进行重量平衡。假代构件135可以表述成被替换为“重量平衡构件”、“平衡构件”或“重量构件”。
273.假代构件135可以包括彼此间隔开的第一假代件135a和第二假代件135b。
274.例如,骨架110的突出部分116的至少一部分可以设置在第一假代件135a与第二假代件135b之间。另外,例如,感测线圈180的至少一部分可以设置在第一假代件135a与第二假代件135b之间。
275.例如,第一假代件135a和第二假代件135b可以具有对称形状。例如,第一假代件135a和第二假代件135b可以关于感测线圈180或骨架110的突出部分116对称地设置,但其不限于此。
276.根据另一实施例的假代构件可以仅包括第一假代件135a和第二假代件135b之一。在根据另一实施例的假代构件中,第一假代件135a和第二假代件135b可以彼此连接。
277.在af移动部分的初始位置处,假代构件135在垂直于光轴的方向上和在从外壳140的第三侧部141-3朝向第四侧部141-4的方向上不面对第一线圈单元120-1和第二线圈单元120-2或不与第一线圈单元120-1和第二线圈单元120-2重叠。
278.假代构件135可以垂直于光轴,并且可以在从外壳140的第三侧部141-3指向第四侧部141-4的方向上面对第三磁体130-3或与第三磁体130-3重叠。
279.另外,假代构件135在与光轴垂直的方向上和在从外壳140的第三侧部141-3指向第四侧部141-4的方向上不与第一位置传感器170重叠。
280.另外,假代构件135可以在光轴方向上不与第一位置传感器170重叠。另外,假代构件135可以在光轴方向上不与感测线圈180重叠,但其不限于此,在另一实施例中,假代构件135可以在光轴方向上彼此重叠。
281.另外,假代构件135在光轴方向上不与第二线圈230重叠。
282.例如,该线圈单元可以不形成在光轴方向上与假代构件135相对应的区域(例如,电路构件231的一个区域)中。
283.当假代构件135包括磁性材料时,假代构件135的磁强度可以小于第三磁体130-3的磁强度。
284.例如,假代构件135可以包括钨,并且钨可以占总重量的95%或更多。例如,假代构件135可以是钨合金。
285.第一假代件135a和第二假代件135b可以为多面体的形式,例如长方体或立方体形状,但其不限于此,而是可以形成为各种形状。例如,假代构件135可以在侧表面的边缘中包括圆形部或曲线表面。
286.接下来,将描述上弹性构件150、下弹性构件160、支撑构件220、第二线圈230、电路板250以及底座210。
287.图5是上弹性构件150的透视图,图6是用于说明上弹性构件150、支撑构件220以及电路板250之间的电连接关系的视图,图7是第一磁体130-1至第三磁体130-3、假代构件135、外壳140、下弹性构件160以及感测线圈180的仰视图,图8是第二线圈230、电路板250以及底座210的分解透视图,图9是沿图2的方向ab截取的镜头驱动设备100的剖视图,图10是沿图2的方向cd截取的镜头驱动设备100的剖视图,并且图11是沿图2的方向ef截取的镜头驱动设备100的剖视图。
288.参考图5至图11,上弹性构件150和下弹性构件160可以构成弹性构件,该弹性构件可以耦接到骨架110和外壳140,并且弹性构件可以将骨架110弹性地支撑在外壳140上。
289.上弹性构件150可以耦接到骨架110的上部、上表面或上端以及外壳140的上部、上表面或上端。下弹性构件160可以耦接到骨架110的下部、下表面或下端以及外壳140的下部、下表面或下端。在上弹性构件和下弹性构件中,弹性构件可以表述成被替换为“弹性单元”、“弹簧”或“弹性本体”。
290.上弹性构件150可以包括彼此间隔开或彼此分离的多个上弹性构件150-1至150-4。图5示出了彼此分离的四个上弹性构件,但其数目不限于此,在另一实施例中可以是两个或更多个。或者,在另一实施例中,上弹性构件150可以实现为一体形成的单个弹性单元。
291.还可以包括第一内侧框架151、第一外侧框架152和第一框架连接部分153,在该第一内侧框架中,第一上弹性构件150-1至第四上弹性构件150-4中的至少一个耦接到骨架110,该第一外侧框架耦接到外壳140,并且该第一框架连接部分153连接第一内侧框架151和第一外侧框架152。此时,内侧框架可以被表述为“内侧部”,而外侧框架可以被表述为“外侧部”。
292.例如,在第一内侧框架151和第二内侧框架161中,可以设置有用于与骨架110的第一耦接部分和第二耦接部分耦接的第一区域,并且在第一外侧框架152和第二外侧框架162中,可以设置有用于与外壳140的第一耦接部分和第二耦接部分耦接的第二区域。虽然图6中未示出,但在第一区域和第二区域中,可以设置有用于与骨架110的第一耦接部分和第二耦接部分以及外壳140的第一耦接部分和第二耦接部分耦接的孔。
293.第一上弹性构件150-1至第四上弹性构件150-4中的每一个上弹性构件的第一外侧框架152可以包括:第一耦接部分510,该第一耦接部分耦接到外壳140的拐角部142-1至142-4中的对应一个拐角部;第二耦接部分520,该第二耦接部分与支撑构件220-1至220-4耦接;以及连接部分530,用于连接第一耦接部分510和第二耦接部分520。
294.第一耦接部分510可以包括耦接到外壳140(例如,拐角部142-1至142-4)的至少一个耦接区域(例如,5a、5b)。
295.例如,在图5中的第一耦接部分510的耦接区域5a和5b中未形成有孔,但在另一实施例中,第一耦接部分510的耦接区域5a和5b可以包括被耦接到外壳140的第一耦接部分的至少一个孔或通孔(未示出)。
296.例如,耦接区域5a和5b中的每一个可以具有一个或多个孔,并且可以设置有对应于外壳140的拐角部142-1至142-4的一个或多个第一耦接部分。在另一实施例中,第一耦接部分510的耦接区域可以以足以与外壳140耦接的各种形状来实现,例如,凹槽形状等。
297.第二耦接部分520可以具有供支撑构件220穿过其中的孔52。支撑构件220的已经穿过孔52的一端可以通过导电粘合构件或焊料901(参见图6)直接耦接到第二耦接部分520,并且第二耦接部分520和支撑构件220-1至220-4可以电连接。
298.例如,第二耦接部分520是其中设置有焊料901以与支撑构件220耦接的区域,并且可以包括孔52以及在孔52周边的区域。
299.连接部分530可以连接第一耦接部分510和第二耦接部分510的耦接区域5a和5b。
300.例如,连接部分530可以包括:第一连接部分530-1,该第一连接部分将第一耦接部分510的第一区域5a与第二耦接部分520连接;和第二连接部分530-2,该第二连接部分将第一耦接部分510的第二区域5b与第二耦接部分520连接。第一和第二连接部分530中的每一个可以包括至少一次的弯曲部或曲线部。
301.参考图5b,下弹性构件160可以实现为一体形成的一个弹性单元,但其不限于此,在另一实施例中它可以包括彼此分离的多个弹性单元。
302.例如,下弹性构件160可以包括:第二内侧框架161,该第二内侧框架161被耦接或固定到骨架110的下部、下表面或下端;第二外侧框架162,该第二外侧框架162被耦接或固定到外壳140的下部、下表面或下端;以及第二框架连接部分163,该第二框架连接部分163将第二内侧框架161和第二外侧框架162彼此连接。
303.上弹性构件150的第一框架连接部分153和下弹性构件160的第二框架连接部分
163中的每一个可以形成为至少一次或多次弯曲或成曲线(或曲线),以形成具有预定形状的图案。通过第一框架连接部分153和第二框架连接部分163的位置变化和微变形,骨架110可以由沿第一方向的上升和/或下降移动柔性地(或弹性地)支撑。
304.上弹性构件150-1至150-4和下弹性构件160可以由板簧形成,但其不限于此,而是可以实现为螺旋弹簧等。
305.接下来,将描述支撑构件220。
306.支撑构件220可以将ois移动部分(例如,外壳140)弹性地支撑在固定部分上,并且可以将ois移动部分支撑成能够在垂直于光轴的方向上移动。固定部分可以包括电路板250、第二线圈230和/或底座210中的至少一个。
307.支撑构件220可以电连接上弹性构件150和电路板250。
308.支撑构件220可以包括多个支撑构件220-1至220-4。
309.例如,支撑构件220可以包括对应于外壳140的拐角部142-1至142-4的第一支撑构件220-1至第四支撑构件220-4。
310.第一支撑构件220-1至第四支撑构件220-4中的每个支撑构件可以设置在外壳140的第一拐角部142-1至第四拐角部142-4中的对应一个拐角部上,并且第一上弹性构件150-1至第四上弹性构件150-4中的对应一个上弹性构件和电路板250可以彼此连接。
311.在图2中,在外壳140的一个拐角部中设置有一个支撑构件,但本发明不限于此。在另一实施例中,两个或更多个支撑构件可以设置在外壳140的一个拐角部中。
312.例如,第一支撑构件220-1至第四支撑构件220-4中的每一个可以电连接第一上弹性构件150-1至第四上弹性构件150-4中的任一个对应的上弹性构件以及电路板250的端子中的任一个对应的端子。
313.第一支撑构件220-1至第四支撑构件220-4可以与外壳140间隔开,而不是耦接或固定到外壳140,第一支撑构件220-1至第四支撑构件220-4中的每个支撑构件的一端可以通过导电粘合剂或焊接,直接连接或耦接到第一上弹性构件150-1至第四上弹性构件150-4中的任一个对应的上弹性构件的第一耦接部分510。
314.另外,第一支撑构件220-1至第四支撑构件220-4中的每个支撑构件的另一端可以通过焊料等直接连接或耦接到电路板250。例如,第一支撑构件220-1至第四支撑构件220-4中的每个支撑构件的另一端可以直接连接或耦接到电路板250的下表面。在另一实施例中,支撑构件220-1至220-4中的每个支撑构件的另一端可以耦接到电路构件231或第二线圈230的底座210。
315.例如,第一支撑构件220-1至第四支撑构件220-4中的每一个可以穿过设置在外壳140的拐角部142-1至142-4中的任一个对应的拐角部中的孔147,但其不限于此。在另一实施例中,支撑构件可以与外壳140的侧部141-1至141-4与拐角部142的边界线相邻地设置,并且可以不穿过外壳140的拐角部142-1至142-4。
316.第一线圈120可以电连接到上弹性构件150。
317.第一线圈单元120-1的一端可以耦接或连接到第一上弹性构件150-1,第一线圈单元120-1的另一端可以连接到第二上弹性构件150-2。例如,第一线圈单元120-1可以耦接或连接到第一上弹性构件150-1和第二上弹性构件150-2的第一内侧框架151。
318.第二线圈单元120-2的一端可以耦接或连接到第三上弹性构件150-3,第二线圈单
元120-2的另一端可以连接到第四上弹性构件150-4。例如,第二线圈单元120-2可以耦接或连接到第三上弹性构件150-3和第四上弹性构件150-4的第一内侧框架151。
319.第一线圈单元120-1和第二线圈单元120-2可以通过第一支撑构件220-1至第四支撑构件220-4电连接到电路板250。
320.例如,第一线圈单元120-1和第二线圈单元120-2可以通过形成在电路板250上的布线或电路图案彼此串联连接。另外,串联连接的第一线圈单元和第二线圈单元的两端可以电连接到电路板250的端子中的任意两个端子。在这种情况下,可以将驱动信号通过电路板250的任意两个端子提供给第一线圈单元120-1和第二线圈单元120-2。
321.在另一实施例中,第一线圈单元120-1和第二线圈单元120-2可以不彼此串联连接,第一线圈单元120-1可以电连接到电路板250的两个端子,第二线圈单元120-2可以电连接到电路板250的其它两个端子,并且可以通过电路板250的四个端子向第一线圈单元120-1和第二线圈单元120-2中的每一个提供单独的驱动信号(例如,驱动电流)。
322.在另一实施例中,第一线圈单元120-1和第二线圈单元120-2可以通过上弹性构件彼此串联连接。例如,所述上弹性构件可以包括第一弹性单元至第三弹性单元,第一线圈单元120-1可以耦接到第一弹性单元和第三弹性单元,第二线圈单元120-2可以耦接到第二弹性单元和第三弹性单元,第一线圈单元和第二线圈单元两者可以通过第三弹性单元串联连接。
323.支撑构件220可以用能够通过弹性支撑的导电构件(例如悬线、板簧或螺旋弹簧等)来实现。另外,在另一实施例中,支撑构件220可以与上弹性构件150一体地形成。
324.为了吸收和缓冲骨架110的振动,镜头驱动设备100可以还设置有第一阻尼器(未示出),该第一阻尼器被设置在上弹性构件150-1至150-4中的每一个上弹性构件与骨架110(或外壳140)之间。
325.例如,第一阻尼器(未示出)可以设置在每个上弹性构件150-1至150-4的第一框架连接部分153与骨架110之间的空间中。
326.另外,例如,镜头驱动设备100可以还设置有第二阻尼器(未示出),该第二阻尼器被设置在下弹性构件160的第二框架连接部分163与骨架110(或外壳140)之间。
327.另外,例如,镜头驱动设备100可以还包括第三阻尼器(未示出),该第三阻尼器被设置在支撑构件220与外壳140的孔147之间。
328.另外,例如,镜头驱动设备100可以还包括设置在第二耦接部分520和支撑构件220的一端处的第四阻尼器(未示出),并且可以还包括设置在支撑构件220的另一端处和电路板250上的第五阻尼器(未示出)。
329.另外,第六阻尼器(未示出)可以被填充在连接部分530和外壳140之间的空余空间中,以防止由于振动引起的振荡。
330.另外,例如,第七阻尼器(未示出)可以进一步设置在外壳140的内侧表面与骨架110的外周表面之间。
331.接下来,将描述底座210、电路板250和第二线圈230。
332.参考图8,底座210被设置在骨架110(或外壳140)下方。
333.底座210可以具有与骨架110的开口或/和外壳140的开口对应的开口21,并且可以匹配或对应于盖构件300,例如,可以是矩形形状。例如,底座210的开口可以是在光轴方向
上贯穿底座210的通孔的形式。
334.支撑部分255或支撑部可以设置在底座210的面对电路板250的端子251的区域中。底座210的支撑部分255可以支撑电路板250的在其上形成有端子251的端子表面253。
335.底座210可以在拐角区域中具有凹形凹槽212,以便避免与耦接到电路板250的支撑构件220-1至220-4的其它端发生空间干涉。例如,凹形凹槽212可以形成为对应于盖构件300的边缘。
336.另外,用于与电路构件231的耦接凹槽23和电路板250的耦接凹槽27耦接的突出部分29可以设置在底座210的开口周围的上表面上。例如,耦接凹槽23可以与电路构件231的开口相邻地形成,并且可以从电路构件231的内侧表面凹进。另外,例如,耦接凹槽27可以与电路板250的开口相邻地形成,并且可以从电路板250的内周表面凹进。
337.另外,其中安装相机模块200的滤光片610的安放部(未示出)可以形成在底座210的下表面上。
338.底座210可以包括:第一安放凹槽215-1,用于设置、安放或容纳第一位置传感器170;第二安放凹槽215-2,用于设置、安置或容纳第二位置传感器240的第一传感器240a;以及第三安放凹槽215-3,用于设置、安放或容纳第二位置传感器240的第二传感器240b。
339.第一安放凹槽215-1至第三安放凹槽215-3可以从底座210的上表面凹进。
340.第二线圈230可以设置在骨架110和/或外壳140下方,并且可以设置在电路板250上。例如,第二线圈230可以设置在电路板250的上表面上。
341.第二线圈230可以设置在外壳140和骨架110下方。
342.第二线圈230可以包括多个线圈单元230-1至230-3。
343.例如,第二线圈230可以包括:第三线圈单元230-1,该第三线圈单元230-1对应于被设置在外壳140中的第一磁体130-1;第四线圈单元230-2,该第四线圈单元230-2对应于第二磁体130-2;以及第五线圈单元230-3,该第五线圈单元230-3对应于第三磁体130-3。
344.这里,第三线圈单元230-1可以表述成被替换为“第一ois线圈单元”或“第一线圈环”,第四线圈单元230-2可以表述成被替换为“第二ois线圈单元”或“第二线圈环”,第四线圈单元230-4可以表述成被替换为“第三ois线圈单元”或“第三线圈环”。
345.例如,第三线圈单元230-1可以在光轴方向上面对第一磁体130-1或与第一磁体130-1重叠,第四线圈单元230-2可以在光轴方向上面对第二磁体130或与第二磁体130重叠,第五线圈单元230-3可以在光轴方向上面对第三磁体130-3或与第三磁体130-3重叠。
346.第三线圈单元230-1至第五线圈单元230-3中的每一个可以具有包括中心孔的闭合曲线,例如,环形状,并且该中心孔可以形成为面对光轴方向。
347.第三至第五线圈单元230-1至230-4中的每一个可以是由精细图案(fp)线圈形成的线圈图案的形式,但其不限于此。
348.例如,第三线圈单元230-1和第四线圈单元230-2可以在从第一磁体130-1指向第二磁体130-2的方向上彼此面对或彼此相对地设置。
349.另外,例如,第三线圈单元230-1和第四线圈单元230-2中的每一个可以在从第一磁体130-1指向第二磁体130-2的方向上不与第五线圈单元230-3重叠。
350.例如,第二线圈230可以还包括具有多边形形状(例如,矩形)的电路构件231,其中形成有第三线圈单元230-1至第五线圈单元230-3。这里,电路构件231可以被表述为“基
板”、“电路板”或“线圈基板”。
351.例如,电路构件231可以包括四个侧,并且第三线圈单元230-1至第五线圈单元230-3中的每一个可以设置在电路构件231的三个侧中的任一个对应侧上,并且线圈单元可以不设置在电路构件231的剩余侧上。
352.例如,第三线圈单元230-1和第四线圈单元230-2中的每一个可以设置成平行于电路构件231的彼此面对的第一侧和第二侧中的任一个,并且第五线圈单元230-3可以设置成平行于电路构件231的第三侧或第四侧。
353.在另一实施例中,省略了电路构件的形式的第二线圈可以仅包括环形线圈块或以精细图案(fp)形式实现的第三线圈单元至第五线圈单元。
354.在另一实施例中,第二线圈的第三线圈单元至第五线圈单元可以以形成在电路板250上的电路图案或布线的形式来实现。
355.电路板250和电路构件231被单独地表述为单独组件,但其不限于此,在另一实施例中,电路板250和电路构件231可以捆绑在一起并且被表述为术语“电路构件”。在这种情况下,支撑构件的另一端可以耦接到“电路构件(例如,电路构件的下表面)”。
356.为了避免与支撑构件220-1至220-4发生空间干涉,可以在电路构件231的边缘处设置有孔230a,支撑构件220-1至220-4可以穿过电路构件231的孔230a。在另一实施例中,该电路构件可以具有被设置在电路构件边缘处的凹槽(而不是孔),以避免与这些支撑构件发生空间干涉。
357.第三线圈单元230-1至第五线圈单元230-3可以电连接到电路板250。例如,第三线圈单元230-1至第五线圈单元230-3可以电连接到电路板250的端子251。
358.电路板250被设置在底座210的上表面上,并且可以包括与骨架110的开口、外壳140的开口和/或底座210开口对应的开口。电路板250的形状可以匹配或对应于底座210的上表面,例如,矩形形状。
359.电路板250可以包括从顶表面弯曲的至少一个端子表面253。从外部向其供应电信号的多个端子251可以设置在电路板250的至少一个端子表面253上。
360.例如,电路板250可以包括设置在上表面的多个侧中的彼此面对的两侧上的两个端子表面,但其不限于此。
361.可以通过设置在电路板250的端子表面253上的所述多个端子251向第一线圈120和第二线圈230中的每一个提供驱动信号。另外,可以通过电路板250的端子251向第一位置传感器170和第二位置传感器240中的每一个提供驱动信号,并且电路板250可以接收第一位置传感器170和第二位置传感器240中的每个位置传感器的输出信号并通过端子251输出。
362.电路板250可以提供为fpcb,但其不限于此,也可以使用表面电极法等直接在底座210的表面上形成电路板250的端子。
363.电路板250可以包括孔250a,支撑构件220-1至220-4穿过该孔以避免与支撑构件220-1至220-4发生空间干涉。孔250a的位置和数目可以对应于或匹配于支撑构件220-1至220-4的位置和数目。在另一实施例中,电路板250可以在拐角中具有避让凹槽而不是孔250a。
364.例如,支撑构件220-1至220-4可以穿过电路板250的孔250a并通过焊料等电连接
到设置在电路板250的下表面上的电路图案,但其不限于此。
365.在另一实施例中,电路板250可以不具有孔,并且支撑构件220-1至220-4可以通过焊料等电连接到被形成在电路板250的上表面上的电路图案或焊盘。
366.或者,在另一实施例中,支撑构件220-1至220-4可以电连接到电路构件231,并且电路构件231可以将支撑构件220-1至220-4与电路板250电连接。
367.电路板250可以包括电连接到第三线圈单元230-1至第五线圈单元230-3的焊盘p1至p4。可以通过电路板250向第二线圈230提供电力或驱动信号。被提供给第二线圈230的电力或驱动信号可以是dc信号或ac信号,或者可以包括dc信号和ac信号,并且可以是电流或电压的形式。
368.例如,第三线圈单元230-1的一端可以连接到第一焊盘p1,而第三线圈单元230-1的另一端可以连接到第二焊盘p2。
369.第四线圈单元230-2的一端可以连接到第三焊盘p3,而第四线圈单元230-2的另一端可以连接到第四焊盘p4。并且第一和第二焊盘中的任一个焊盘(例如,p2)以及第三焊盘p3和第四焊盘p4中的任一个焊盘(例如,p4)可以通过第一电路图案(或第一布线)彼此连接。
370.第三线圈单元230-1和第四线圈单元230-2可以彼此串联连接。并且第一焊盘p1和第二焊盘p2中的剩余另一个焊盘(例如,p1)以及第三焊盘p3和第四焊盘p4中的剩余另一个焊盘(例如,p3)可以通过第二电路图案(或第二布线)电连接到电路板250的第一端子和第二端子。另外,可以将第一驱动信号通过电路板250的第一端子和第二端子提供给第一和第二线圈单元230-1和230-2。
371.另外,例如,第五线圈单元230-3的一端可以连接到第五焊盘p5,而第五线圈单元230-3的另一端可以连接到第六焊盘p6。第五焊盘p5和第六焊盘p6可以通过第三电路图案(或第三布线)电连接到电路板250的第三端子和第四端子。可以将第二驱动信号通过电路板250的第三端子和第四端子提供给第五线圈单元230-3。
372.第一电路图案至第三电路图案(或布线)可以形成在电路板250中。
373.通过第一磁体130-1至第三磁体130-3与被提供有第一驱动信号和第二驱动信号的第三线圈单元230-1至第五线圈单元230-3之间的相互作用,ois移动部分(例如,外壳140)可以在第二和/或第三方向上(例如,在x轴和/或y轴方向上)移动,结果,可以执行手抖动校正。
374.第一位置传感器170和第二位置传感器240的第一传感器240a和第二传感器240b可以设置在电路板250和底座210之间。例如,第一位置传感器170以及第一传感器240a和第二传感器240b可以设置、安装或耦接在电路板250的下表面上。
375.在另一实施例中,第一位置传感器170以及第一传感器240a和第二传感器240b中的至少一个可以设置在电路板250的上表面上。
376.在另一实施例中,第一位置传感器可以设置在外壳140中而不是在底座210中,并且外壳140可以设有用于布置第一位置传感器170的安放部,此时,该安放部可以是凹槽或孔。例如,设置在外壳140中的第一位置传感器可以与感测磁体在光轴方向上重叠,但其不限于此,在另一实施例中,二者可以在光轴方向上彼此不重叠。另外,设置在外壳140中的第一位置传感器可以设置在感测线圈180下方,但其不限于此,而是可以设置在感测线圈的一
侧处。
377.第一位置传感器170以及第一传感器240a和第二传感器240b中的每一个可以电连接到电路板250。例如,第一位置传感器170以及第一传感器240a和第二传感器240b中的每一个可以电连接到电路板250的端子251。
378.第一位置传感器170可以是“af位置传感器”,第二位置传感器240可以是“ois位置传感器”。第二位置传感器240可以包括第一传感器240a和第二传感器240b。
379.通过由于第一线圈120与磁体130之间的相互作用引起的电磁力,af移动部分(例如,骨架110和感测线圈180)可以在光轴方向上移动,第一位置传感器170可以检测正在光轴方向上移动的感测线圈180的磁场的强度或磁力,并且可以输出根据感测结果的输出信号。
380.例如,由第一位置传感器170检测到的感测线圈180的磁场的强度或磁力可以根据骨架110在光轴方向上的位移而改变,第一位置传感器170可以输出与感测到的磁场强度成正比的输出信号,并且可以使用第一位置传感器170的输出信号来检测骨架110在光轴方向上的位移。
381.通过由于第二线圈230与磁体130之间的相互作用引起的电磁力,ois移动部分可以在垂直于光轴的方向上移动,第一传感器240a和第二传感器240b中的每一个可以检测在垂直于光轴的方向上移动的ois移动部分的磁体130的磁场强度,并且可以输出根据检测结果的输出信号。
382.ois移动部分在垂直于光轴的方向上的位移(例如,ois移动部分的偏移或倾斜)可以使用第一传感器240a和第二传感器240b的输出信号来检测。这里,ois移动部分可以包括af移动部分和安装在外壳140上的组件。
383.例如,ois移动部分可以包括af移动部分和外壳140、磁体130以及假代构件135。
384.第一位置传感器170以及第一传感器240a和第二传感器240b中的至少一个可以单独实现为霍尔传感器。
385.或者,第一位置传感器170以及第一传感器240a和第二传感器240b中的至少一个可以以包括霍尔传感器的驱动器集成电路(ic)的形式来实现。
386.另外,由于第一位置传感器170被设置在底座210上,因此与第一位置传感器170被设置在ois移动部分(例如,外壳)上的情况相比,第一位置传感器170和感测线圈180之间的分离距离可以增大,因此第一位置传感器170可以实现为高灵敏度霍尔传感器或隧道磁阻(tmr)传感器。
387.在单独实现霍尔传感器的实施例中,霍尔传感器170、240a或240b可以包括两个输入端子和两个输出端子。霍尔传感器的两个输入端子可以电连接到电路板250的两个端子,并且可以通过这两个输入端子提供驱动信号。另外,霍尔传感器的两个输出端子可以电连接到电路板250的其它两个端子,可以通过这两个输出端子输出霍尔传感器的输出信号。
388.在以包括霍尔传感器的驱动器集成电路(ic)的形式实现的实施例中,驱动信号可以从第一位置传感器170直接提供给第一线圈120。例如,第一位置传感器170可以通过两个支撑构件电连接到两个上弹性构件,驱动信号可以直接提供给第一线圈120。另外,第一驱动信号可以从第一传感器240a直接提供给第三线圈单元230-1和第四线圈单元230-2,并且第二驱动信号可以直接从第二传感器240b提供给第五线圈单元230-3。
389.例如,第一传感器240a可以电连接到电路板250的两个焊盘,该两个焊盘电连接到串联连接的第三线圈单元230-1和第四线圈单元230-2,并且第二传感器240b可以电连接到电路板250的被电连接到第五线圈单元230-3的两个焊盘。
390.另外,在以包括霍尔传感器的驱动器ic(集成电路)的形式实现的实施例中,用于与驱动器ic进行数据通信的信号可以通过电路板250的端子251传输和接收。用于数据通信的信号可以包括时钟信号、数据信号和电源信号。
391.接下来,将描述盖构件300。
392.盖构件300可以在与底座210一起形成的容纳空间中容纳ois移动部分、上弹性构件150、下弹性构件160、第一位置传感器170、第二线圈230、底座210、电路板250、支撑构件220以及第二位置传感器240。
393.盖构件300可以是包括上板310和侧板302并具有敞口下部的盒的形式,并且盖构件300的下部可以耦接到底座210的上部。盖构件300的上板的形状可以是多边形,例如矩形或八边形。
394.盖构件300可以在上板中具有开口,以使耦接到骨架110的镜头(未示出)暴露于外部的光。盖构件300的材料可以是诸如sus的非磁性材料,以防止粘附到磁体130。盖构件300可以由金属板形成,但其不限于此,而是可以由塑料形成。另外,盖构件300可以连接到相机模块200的第二保持座800的接地。盖构件300可以阻挡电磁干扰(emi)。
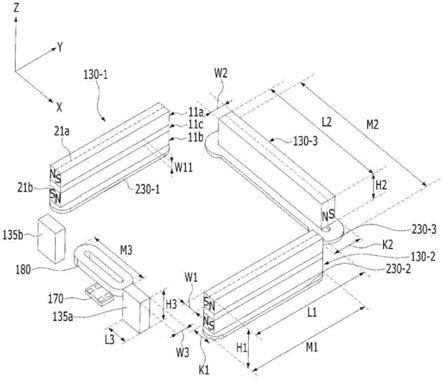
395.图12是示出了第一位置传感器170、感测线圈180、第一磁体130-1至第三磁体130-3、假代构件135以及第三至第五线圈单元230-1至230-5的透视图;图13是第一位置传感器170、感测线圈180、第一磁体130-1至第三磁体130-3、假代构件135、第三至第五线圈单元230-1至230-5以及第一传感器240a和第二传感器240b的透视图;并且图14是图12中所示的构造的仰视图。
396.参考图12至图14,第一磁体130-1可以包括第一磁体部分11a、第二磁体部分11b以及被设置在第一磁体部分11a和第二磁体部分11b之间的第一分隔壁11c。这里,第一分隔壁11c可以表述成被替换为“第一非磁性分隔壁”。
397.例如,第一磁体部分11a和第二磁体部分11b可以在光轴方向上彼此间隔开,并且第一分隔壁11c可以位于第一磁体部分11a和第二磁体部分11b之间。
398.第一磁体部分11a可以包括n极、s极以及n极和s极之间的第一边界表面21a。第一边界表面21a是基本不具有磁性的部分,可以包括几乎没有极性的一段,并且该第一边界表面可以是自然发生的部分以形成由一个n极和一个s极构成的磁体。
399.第二磁体部分11b可以包括n极、s极以及n极和s极之间的第二边界表面21b。第二边界表面21b可以包括几乎没有极性的一段,作为基本不具有磁性的部分,并且该第二边界表面可以是自然发生的部分以形成由一个n极和一个s极构成的磁体。
400.第一分隔壁11c将第一磁体部分11a和第二磁体部分11b分开或隔开,并且是基本不具有磁性的部分,并且可以是几乎没有极性的部分。例如,第一分隔壁11c可以是非磁性材料或空气。分隔壁可以被表述为“中性区”或“中性区域”。第一分隔壁11c将第一磁体部分11a和第二磁体部分11b分开或隔开,是基本不具有磁性的部分,并且可以是几乎没有极性的部分。例如,第一分隔壁11c可以是非磁性材料或空气。该分隔壁可以被表述为“中性区”或“中性区域”。
401.第一分隔壁11c是在第一磁体部分11a和第二磁体部分11b被磁化时人为形成的部分,第一分隔壁11c的宽度w11可以大于第一边界表面21a和第二边界表面21b的对应宽度。
402.这里,第一分隔壁11c的宽度w11可以是第一分隔壁11c在从第一磁体部分11a指向第二磁体部分11b的方向上的长度。或者,第一分隔壁11c的宽度w11可以是第一分隔壁11c在光轴方向上的长度。
403.第一磁体部分11a和第二磁体部分11b可以设置成使得彼此相反的极性在光轴方向上彼此面对。
404.例如,第一磁体部分11a的s极和第二磁体部分11b的n极可以设置成面对第一线圈单元120-1,但其不限于此,反过来也可以。
405.第二磁体130-2可以包括第三磁体部分12a、第四磁体部分12b以及设置在第三磁体部分12a与第四磁体部分12b之间的第二分隔壁12c。这里,第二分隔壁12c也可以表述成被替换为“第二非磁性分隔壁”。
406.例如,第三磁体部分12a和第四磁体部分12b可以在光轴方向上彼此间隔开,并且第二分隔壁12c可以位于第三磁体部分12a与第四磁体部分12b之间。
407.第三磁体部分12a和第四磁体部分12b中的每一个可以包括n极、s极以及n极与s极之间的边界表面。
408.对于第一磁体部分11a和第二磁体部分11b的边界表面21a、21b的说明可以应用于第三磁体部分12a和第四磁体部分12b中的每个磁体部分的边界表面。另外,第一分隔壁11c的上述说明也可以应用于第二分隔壁12c。
409.第一分隔壁11c和第二分隔壁12c中的每一个可以在水平方向或垂直于光轴的方向上延伸。例如,第一分隔壁11c和第二分隔壁12c中的每一个可以在光轴方向上将两个磁体部分11a和11b以及12a和12b彼此隔开或分开。
410.第一磁体部分11a、第一分隔壁11c和第二磁体部分11b可以在光轴方向上依次布置。第三磁体部分12a、第二分隔壁12c和第四磁体部分12b可以在光轴方向上依次布置。
411.例如,第一磁体部分11a可以设置在第一分隔壁11c上,第二磁体部分11b可以设置在第一分隔壁11c下方。另外,第三磁体部分12a可以设置在第二分隔壁12c上,第四磁体部分12b可以设置在第二分隔壁12c下方。
412.例如,第一分隔壁11c和第二分隔壁12c中的每一个可以平行于垂直于光轴的直线,并且第一磁体部分11a和第二磁体部分11b中的每个磁体部分的边界表面21a和21b可以平行于光轴。
413.例如,在第一磁体130-1和第二磁体130-2中的每一个中,双极磁化的n极和s极可以设置在光轴方向上。
414.第三磁体130-3可以包括n极、s极以及n极和s极之间的第二边界表面21b。第三磁体130-3的边界表面可以包括几乎没有极性的一段,作为基本不具有磁性的部分,并且它可以是自然发生的部分以形成由一个n极和一个s极构成的磁体。
415.例如,第一磁体130-1可以位于第三线圈单元230-1的区域的内侧上,并且可以在光轴方向上与第三线圈单元230-1重叠。
416.例如,第二磁体130-2可以位于第四线圈单元230-2的区域的内侧上,并且可以在光轴方向上与第四线圈单元230-2重叠。
417.例如,第三磁体130-3可以位于第五线圈单元230-3的区域的内侧上,并且可以在光轴方向上与第五线圈单元230-3重叠。
418.第三线圈单元230-1的任一个部分可以与第一磁体部分11a的第一极性部、第一分隔壁11c以及第二磁体部分11b的第二极性部在光轴方向上同时重叠。这里,第一极性部可以是n极或s极,第二极性部可以是具有与第一极性相反的极性的部分。
419.第四线圈单元230-2的任一个部分可以与第三磁体部分12a的第一极性部、第二分隔壁12c以及第四磁体部分12b的第二极性部在光轴方向上同时重叠。
420.第五线圈单元230-3的任一个部分可以在光轴方向上与第三磁体130-3的n极和s极重叠。
421.第一磁体130-1和第二磁体130-2可以具有相同的形状,但其不限于此。例如,第一磁体130-1和第二磁体130-2可以具有相同的长度、宽度和高度,但其不限于此。
422.另外,第三线圈单元230-1和第四线圈单元230-2可以具有相同的形状,但其不限于此。例如,第三线圈单元230-1和第四线圈单元230-2可以具有相同的长度、宽度和高度,但其不限于此。
423.参考图12至图14,将描述第一磁体130-1至第三磁体130-3、假代构件135a和135b、感测线圈180以及第三线圈单元230-1至第五线圈单元230-3中的每一个的长度、宽度和高度。
424.这里,第一磁体130-1至第三磁体130-3、假代构件135a和135b、感测线圈180以及第三线圈单元230-1至第五线圈单元230-3中的每一个的长度可以分别是沿其长度方向的长度。
425.另外,第一磁体130-1至第三磁体130-3、假代构件135a和135b、感测线圈180以及第三线圈单元230-1至第五线圈单元230-3中的每一个的宽度可以分别是沿其宽度方向的宽度。这里,宽度方向可以垂直于长度方向,并且可以是其中组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的长度较短的方向。另外,组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的宽度可以表述成被替换为每个组件的“厚度”。
426.第一磁体130-1至第三磁体130-3、假代构件135a和135b、感测线圈180以及第三线圈单元230-1至第五线圈单元230-3中的每一个的高度可以分别是沿其光轴方向的长度。
427.例如,组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的长度可以是组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的面对骨架110的第一表面的水平方向上的长度。
428.另外,例如,组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的宽度可以是从组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的面对骨架110的第一表面到作为与第一表面相反的表面的第二表面的距离。
429.另外,组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的高度可以是组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的面对骨架110的第一表面的纵向方向上的长度。或者,例如,组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的高度可以是从组件130-1至130-3、135a、135b、180和230-1至230-3中的每一个的下表面到其上表面的距离。
430.第一磁体130-1的长度l1可以小于第三线圈单元230-1的长度m1(l1<m1),但其不
限于此,在另一实施例中,二者可以彼此相同。
431.第一磁体130-1的宽度w1可以小于第三线圈单元230-1的宽度k1(w1《k1),但其不限于此,在另一实施例中,二者可以彼此相同。
432.另外,第二磁体130-2的长度可以小于第四线圈单元230-2的长度。第二磁体130-2的宽度可以小于第四线圈单元230-2的宽度。
433.第三磁体130-3的长度l2可以小于第五线圈单元230-3的长度m2(l2<m2),但其不限于此,在另一实施例中,二者可以彼此相同。
434.第三磁体130-3的宽度w2可以小于第五线圈单元230-3的宽度k2(w2<k2),但其不限于此,在另一实施例中,二者可以彼此相同。
435.第五线圈单元230-3的长度m2可以大于第三线圈单元230-1的长度m1和/或第四线圈单元230-2的长度(m2》m1),但其不限于此,并且在另一实施例中,二者可以彼此相同。
436.第三磁体130-3的长度l2可以大于第一磁体130-1的长度l1和/或第二磁体130-2的长度(l2》l1),但其不限于此,并且在另一实施例中,二者可以彼此相同。
437.在实施例中,由于m2》m1且l2》l1,所以第五线圈单元230-3和第三磁体130-3产生的第一电磁力可以大于第三线圈单元230-1和第一磁体130-1产生的第二电磁力以及由第四线圈单元230-2和第二磁体130-2产生的第三电磁力中的任一个。因此,本实施例可以减小y轴方向上的第一电磁力与x轴方向上的第二电磁力和第三电磁力之和之间的差值,并且可以减小在x轴方向上相对于ois移动部分的驱动力与在y轴方向上相对于ois移动部分的驱动力之间的差值,由此提高ois操作的可靠性。
438.另外,第五线圈单元230-3的宽度k2可以大于第三线圈单元230-1的宽度k1和/或第四线圈单元230-2的宽度(k2》k1),但其不限于此,并且在另一实施例中,二者可以彼此相同。
439.第三磁体130-3的宽度w2可以大于第一磁体130-1的宽度w1和/或第二磁体130-2的宽度(w2》w1),但其不限于此,并且在另一实施例中,二者可以彼此相同。
440.由于w2》w1,实施例可以减小y轴方向上的第一电磁力与x轴方向上的第二电磁力和第三电磁力之和之间的差值,并且可以减小在x轴方向上相对于ois移动部分的驱动力与在y轴方向上相对于ois移动部分的驱动力之间的差值,由此提高ois操作的可靠性。
441.第三磁体130-3的高度h2可以小于第一磁体130-1的高度h1和/或第二磁体130-2的高度(h2《h1),但其不限于此,并且在另一实施例中,二者可以彼此相同,并且在另一实施例中,前者可以大于后者。
442.由于h2<h1,实施例可以减轻镜头驱动设备100的重量,由此降低af驱动和/或ois驱动的功耗。
443.第一假代件135a和第二假代件135b中的每一个的长度l3可以小于第一磁体130-1至第三磁体130-3中的每一个的长度l2(l3《l2),但其不限于此,并且在另一实施例中,前者可以与后者相同或大于后者。
444.第一假代件135a和第二假代件135b中的每一个的宽度w3可以小于第一磁体130-1至第三磁体130-3中的每一个的宽度(w3《w1,w2),但其不限于此,并且在另一实施例中,前者可以与后者相同或大于后者。
445.第一假代件135a和第二假代件135b中的每一个的高度h3可以小于第一磁体130-1
和第二磁体130-2中的每一个的高度h1并且可以大于第三磁体130-3的高度h2(h2《h3《h1),但其不限于此。在另一实施例中,第一假代件135a和第二假代件135b中的每一个的高度可以等于或大于第一磁体130-1和第二磁体130-2中的每一个的高度h1。在另一实施例中,第一假代件135a和第二假代件135b中的每一个的高度可以小于或等于第三磁体130-3的高度h2。
446.感测线圈180的长度m3可以小于第三线圈单元230-1至第五线圈单元230-3中的每一个的长度m1和m2(m3《m1,m2),但其不限于此,在其它实施例中,前者可以与后者相同或大于后者。
447.感测线圈180的宽度k3可以小于第五线圈单元230-3的宽度k2(k3<k2)。感测线圈180的宽度k3可以等于或小于第三线圈单元230-1和第四线圈单元230-2中的每一个的宽度k1,但其不限于此,在另一实施例中,前者可以大于后者。
448.感测线圈180在光轴方向上的长度(或高度)可以大于第三线圈单元至第五线圈单元中的每个线圈单元在光轴方向上的长度(或高度)。因此,可以提高感测线圈180的磁场强度,并且可以提高第一位置传感器170的灵敏度。在另一实施例中,感测线圈180在光轴方向上的长度(或高度)可以与第三线圈单元至第五线圈单元中的每个线圈单元在光轴方向上的长度(或高度)相同。
449.另外,第一磁体130-1与第三线圈单元230-1在光轴方向上的第一分离距离、第二磁体130-2与第四线圈单元230-2在光轴方向上的第二分离距离、以及第三磁体130-3与第五线圈单元230-3在光轴方向上的第三分离距离可以彼此相同,但其不限于此。
450.在另一实施例中,第三分离距离可以小于第一分离距离和/或第二分离距离。并且,由于第三分离距离小于第一分离距离和/或第二分离距离,所以与第一分离距离至第三分离距离都相同的情况相比时,在另一实施例中,可以进一步减小在y轴方向上产生的电磁力与在x轴方向上产生的电磁力之间的差值。
451.在ois移动部分的初始位置处,第一位置传感器170可以在光轴方向上与感测线圈180重叠。第一位置传感器170可以在光轴方向上不与假代构件135重叠,但其不限于此,在另一实施例中,第一位置传感器170的至少一部分可以在光轴方向上与假代构件135重叠。
452.这里,ois移动部分的初始位置可以是在没有向第二线圈230提供驱动信号的状态下、由支撑构件220和弹性构件150和160支撑的ois移动部分的初始位置。另外,ois移动部分的初始位置可以是当重力在从骨架110到底座210的方向上作用时或者相反地当重力在从底座210到骨架110的方向上作用时、ois移动部分所处的位置。
453.在ois移动部分的初始位置处,第一磁体130-1至第三磁体130-3中的每个磁体可以与第三线圈单元230-1至第五线圈单元230-3中的任一个对应的线圈单元在光轴方向上重叠。
454.第一传感器240a可以在光轴方向上与第一磁体130-1重叠,第二传感器240b可以在光轴方向上与第三磁体130-3重叠。
455.另外,在图13和图14中,第一传感器240a在光轴方向上与第三线圈单元230-1重叠,第二传感器240b在光轴方向上与第五线圈单元230-3重叠,但其不限于此,在另一实施例中,第一传感器可以不与第三线圈单元在光轴方向上重叠,第二传感器可以不与第五线圈单元在光轴方向上重叠。
456.参考图14,第一位置传感器170可以位于感测线圈180的区域内。例如,第一位置传感器170可以设置在感测线圈180下方,第一传感器240a可以设置在第一磁体130-1下方,并且第二传感器240b可以设置在第三磁体130-3下方。
457.为了提高第一位置传感器170的灵敏度,第一位置传感器170的感测元件(或感测区域)可以在光轴方向上与感测线圈180重叠。
458.在ois移动部分的初始位置处,第一位置传感器170的感测元件可以在光轴方向上与感测线圈180重叠。
459.第一位置传感器170被设置在固定部分(例如,电路板250和底座210)上,因为感测线圈180被设置在ois移动部分(例如,骨架110)中,所以当ois移动部分相对于固定部分在垂直于光轴的方向上移动时,感测线圈180和第一位置传感器170之间在光轴方向上的对准或相对位置关系可能改变,结果,第一位置传感器170的灵敏度可能减小,或者第一位置传感器170的灵敏度可能受到影响。
460.在ois移动部分在垂直于光轴的方向上的行程范围内,第一位置传感器170的感测元件和感测线圈180的至少一部分可以在光轴方向上维持重叠状态。
461.例如,感测线圈180的至少一部分可以设置在第一假代件35a和第二假代件35b之间,但其不限于此。
462.镜头驱动设备100的af移动部分和ois移动部分可以由弹性部分支撑。例如,该弹性部分可以包括上弹性构件150、下弹性构件160和支撑构件220中的至少一个。
463.例如,该弹性部分可以包括第一弹性部分和第二弹性部分,该第一弹性部分将af移动部分弹性支撑在外壳140上,该第二弹性部分将ois移动部分弹性支撑在固定部分上。
464.例如,第一弹性部分可以包括上弹性构件150和下弹性构件160,第二弹性部分可以包括支撑构件220。
465.被第一弹性部分和第二弹性部分支撑在固定部分上的ois移动部分可能在重力的影响下在重力方向上下垂或移动。
466.通常,当af位置传感器被放置在ois移动部分(例如,外壳或骨架)中时,由于af位置传感器可以通过反馈操作来检测af移动部分在光轴方向上的位移,所以可以自动校正或补偿af移动部分由于重力的影响而引起的下垂。
467.然而,由于被设置在ois移动部分中的af位置传感器不能检测ois移动部分相对于固定部分在光轴方向上的位移,因此af位置传感器不能自动校正或补偿ois移动部分由于重力的影响而引起的下垂或移动。
468.在本实施例中,由于第一位置传感器170被设置在固定部分(例如,电路板250和底座210)中,因此可以自动补偿或校正af移动部分由ois移动部分由于重力影响的移动(或偏斜)而引起的移动(或偏斜),因此,可以执行准确的af驱动,由此提高af操作的可靠性。
469.图15a示出了用于模拟的感测线圈180和第一位置传感器170的布置。图15b示出了图15a的感测线圈180根据af移动部分在光轴方向上的移动的位置变化,图15c示出了由第一位置传感器170根据图15b的感测线圈180的位置变化而检测到的感测线圈180的磁场强度的变化。
470.参考图15a至图15c,从上方观察的感测线圈180的外周表面的形状可以是矩形,但其不限于此。感测线圈180的外周表面的长度x1可以是3.29[mm],感测线圈180的外周表面
的宽度y1可以是2.05[mm],感测线圈180的内周表面的长度x2可以是1.93[mm],感测线圈180的内周表面的宽度y2可以是0.74[mm],并且感测线圈180在光轴方向上的长度z1可以是0.54[mm]。另外,被提供给感测线圈180的驱动信号ia可以是100[ma]。另外,从第一位置传感器170的下表面17a到感测线圈180的下表面18a的分离距离d1可以是0.43[mm]。
[0471]
在af移动部分的初始位置(例如,其中z=0的位置)处,af移动部分的前行程可以是200[μm],af移动部分的后行程可以是200[μm]。
[0472]
在图15c中,x轴表示感测线圈180在光轴方向上的位移(或位置),y轴表示第一位置传感器170检测到的感测线圈180的磁场强度变化。g1表示由第一位置传感器170检测到的在感测线圈180的光轴方向上的磁场强度变化,g2表示由第一位置传感器170检测到的在垂直于感测线圈180的光轴的方向上的磁场强度的变化。
[0473]
如g1所示,由第一位置传感器170根据af移动部分的光轴方向的位移检测到的在光轴方向上的磁场变化可以在-4.6[mt(毫特斯拉)]至-8.2[mt]的范围内,g1可能是线性曲线图。
[0474]
第一位置传感器170的输出可以与由第一位置传感器170感测到的感测线圈180的磁场强度成比例,并且相机模块200或终端200a的控制单元830和780可以使用第一位置传感器170的输出来检测af移动部分在光轴方向上的位移。
[0475]
本实施例包括三个磁体130-1至130-3和与其对应的三个ois线圈单元230-1至230-3,以便减少被包括在双相机模块或多相机模块中的相邻镜头驱动设备中的磁体之间的磁场干扰。
[0476]
三个磁体130-1至130-3中的两个磁体130-1和130-2通过与第一线圈单元120-1和第二线圈单元120-2的相互作用而在光轴方向上执行af操作,同时,可以通过与第三线圈单元230-1和第四线圈单元230-2的相互作用而在垂直于光轴的x轴方向上执行ois操作。
[0477]
三个磁体130-1至130-3中的另一磁体130-3可以通过与第五线圈单元230-3的相互作用而仅在垂直于光轴的y轴方向上执行ois操作。
[0478]
通过在第三磁体130-3的相反侧上布置假代构件135,本实施例可以防止在osi操作期间由于重量偏心而引起的振荡。
[0479]
通常,由于一个磁体与一个线圈单元之间的相互作用而引起的在x轴方向上的电磁力小于由于两个磁体与两个线圈单元之间的相互作用而引起的在y轴方向上的电磁力。另外,x轴方向上的电磁力与y轴方向上的电磁力之间的差值可能导致ois驱动的故障。
[0480]
为了减小在x轴方向上产生的电磁力与在y轴方向上产生的电磁力之间的差值,本实施例可以配置如下。
[0481]
另外,第五线圈单元230-3中的线圈的匝数(下文称为“第一匝数”)可以大于第三线圈单元230-1中的线圈的匝数(下文称为“第二匝数”)或/和第四线圈单元230-2中的线圈的匝数(下文称为“第三匝数”),因而,可以减小在x轴方向上产生的电磁力与在y轴方向上产生的电磁力之间的差值。
[0482]
另外,例如,第二匝数与第三匝数可以相同,但其不限于此。在另一实施例中,第一匝数和第二匝数(或第三匝数)可以相同。
[0483]
另外,第三磁体130-3的长度l2可以大于第一磁体130-1的长度l1和/或第二磁体130-2的长度,第五线圈单元230-3的长度m2可以大于第三线圈单元230-1的长度m1和/或第
四线圈单元230-2的长度,因而,可以减小在x轴方向上产生的电磁力与在y轴方向上产生的电磁力之间的差值。
[0484]
图16示出了镜头驱动设备的另一实施例。参考图16,在另一实施例中,镜头驱动设备100的感测线圈180可以被感测磁体180a替代。
[0485]
例如,感测磁体180a可以设置在骨架110上而不是感测线圈180上。例如,感测磁体180a可以耦接到骨架110的突出部分116。例如,骨架110的突出部分可以具有凹槽,感测磁体180a被安放或设置在该凹槽中。
[0486]
感测磁体180a的形状可以是圆柱形状或多面体形状,但其不限于此。
[0487]
例如,感测磁体180a可以具有圆柱形状,其中在光轴方向上的长度比在垂直于光轴的方向上的长度长,但其不限于此。
[0488]
例如,感测磁体180在垂直于光轴的方向上剖切的截面形状可以是圆形、卵形或多边形(例如,三角形或矩形)形状,但其不限于此。
[0489]
根据上述实施例的镜头驱动设备100可以在各种领域中实现,例如,作为相机模块或光学装置,或者可以在相机模块或光学装置中使用。
[0490]
例如,根据本实施例的镜头驱动设备100可以被包括在光学装置中,该光学装置用于利用光的反射、折射、吸收、干涉和衍射等特性形成空间中的物体的图像,或者提高眼睛的视力,或通过镜头记录图像并再现图像,或者用于光学测量、图像传播或传输等。例如,根据本实施例的光学装置可以包括智能手机和配备有相机的便携式终端。
[0491]
图17是根据本发明的第一实施例的相机模块200的分解透视图。
[0492]
参考图17,相机模块200可以包括镜头或镜筒400、镜头驱动设备100、粘合构件612、滤光片610、第一保持座600和第二保持座800、图像传感器810、运动传感器820、控制单元830以及连接器840。
[0493]
镜头或镜筒400可以安装在镜头驱动设备100的骨架110上。
[0494]
第一保持座600可以设置在镜头驱动设备100的底座210下方。滤光片610被安装在第一保持座600上,并且第一保持座600可以包括突出部分500,滤光片610被安装在该突出部分上。
[0495]
粘合构件612可以将镜头驱动设备100的底座210耦接或附接到第一保持座600。除了上述结合作用之外,粘合构件612还可以用于防止异物被引入到镜头驱动设备100中。
[0496]
例如,粘合构件612可以是环氧树脂、热固性粘合剂或可紫外线固化粘合剂。
[0497]
滤光片610可以用于阻挡穿过镜筒400的光中的特定频带的光入射在图像传感器810上。滤光片610可以是红外截止滤光片,但其不限于此。此时,滤光片610可以设置成平行于x-y平面。
[0498]
可以在第一保持座600的安装有滤光片610的部分中形成开口,使得穿过滤光片610的光可以入射到图像传感器810上。
[0499]
第二保持座800可以设置在第一保持座600下方,并且图像传感器810可以被安装在第二保持座600中。图像传感器810是穿过滤光片610的光入射到其上以形成光中所包含的图像的部分。
[0500]
第二保持座800可以设置有各种电路、设备、控制单元等,以将形成在图像传感器810上的图像转换成电信号并将其传输到外部设备。
[0501]
第二保持座800可以实现为电路板,图像传感器可以安装在该电路板上,可以形成电路图案,并且各种元件可以与上述电路图案耦接。
[0502]
图像传感器810可以接收包含在通过镜头驱动设备100入射的光中的图像,并将接收到的图像转换成电信号。
[0503]
滤光片610和图像传感器810可以间隔开,以在第一方向上彼此面对。
[0504]
运动传感器820可以安装在第二保持座800上,并且可以通过设置在第二保持座800上的电路图案电连接到控制单元830。
[0505]
运动传感器820根据相机模块200的移动来输出旋转角速度信息。运动传感器820可以实现为2轴或3轴陀螺仪传感器或角速度传感器。
[0506]
控制单元830安装或设置在第二保持座800上。第二保持座800可以电连接到镜头驱动设备100。例如,第二保持座800可以电连接到镜头驱动设备100的电路板250。
[0507]
例如,可以通过第二保持座800向第一位置传感器170和第二位置传感器240提供驱动信号,并且可以向第二保持座800传输第一位置传感器170的输出信号和第二位置传感器240的输出信号。例如,可以由控制单元830接收第一位置传感器170的输出信号和第二位置传感器240的输出信号。
[0508]
连接器840电连接到第二保持座800并且可以包括用于电连接到外部设备的端口。
[0509]
图18是根据另一实施例的相机模块1000的透视图。
[0510]
参考图18,相机模块1000可以是双相机模块,其包括第一镜头驱动设备100-1和第二镜头驱动设备100-2。
[0511]
第一镜头驱动设备100-1和第二镜头驱动设备100-2中的每一个可以是用于自动对焦(af)的镜头驱动设备或用于光学图像稳定器(ois)的镜头驱动设备。
[0512]
用于af的镜头驱动设备是指仅能够执行自动对焦功能的设备,而用于ois的镜头驱动设备是指能够执行自动对焦功能和光学图像稳定器(ois)功能的设备。
[0513]
例如,第一镜头驱动设备100-1可以是图1中所示的实施例100,第二镜头驱动设备100-2可以是图1中所示的实施例100或用于af的镜头驱动设备。
[0514]
相机模块1000可以还包括用于安装第一镜头驱动设备100-1和第二镜头驱动设备100-2的电路板1100。在图18中,第一镜头驱动设备100-1和第二镜头驱动设备100-2被并排设置在一个电路板1100上,但其不限于此。在另一实施例中,电路板1100可以包括彼此分离的第一电路板和第二电路板,第一镜头驱动设备可以设置在第一电路板上,第二镜头驱动设备可以设置在第二电路板上。
[0515]
通过将第一镜头驱动设备100-1的假代构件135布置成与第二镜头驱动设备100-2相邻,第一镜头驱动设备100-1的第一磁体130-1至第三磁体130-3之间的磁场减小了,并且第二镜头驱动设备100-2中所包含的磁体可以减小,因而,可以确保af驱动的可靠性和/或第一镜头驱动设备100-1和第二镜头驱动设备100-2中的每个镜头驱动设备的ois驱动的可靠性。
[0516]
当双相机模块或多相机模块中包含的镜头驱动设备设置有与af位置传感器对应的感测磁体时,可能会由于感测磁体的磁场的影响而导致相机模块的功能(例如af操作或ois操作)发生故障,因此,相机模块的分辨率可能降低。
[0517]
图19a示出了图18的双相机模块的实施例。另外,图19a示出了磁体30a、30b、30c、
31a、31b和31c以及感测磁体80a和80b的磁场。
[0518]
图19a的双相机模块可以包括第一镜头驱动设备100a和第二镜头驱动设备100c。
[0519]
第一镜头驱动设备100a可以包括三个驱动磁体30a、30b和30c以及一个感测磁体80a。
[0520]
例如,第一镜头驱动设备100a和第二镜头驱动设备100c中的每一个可以是根据图1的实施例的镜头驱动设备100、图16的镜头驱动设备(或图20b的镜头驱动设备100-2)或第三镜头驱动设备中的任一个。
[0521]
对于每个实施例,可以应用根据图1的实施例的镜头驱动设备100和图16的镜头驱动设备(或图20b的镜头驱动设备100-2)的描述。
[0522]
也就是说,驱动磁体30a、30b和30c可以对应于图1和图16的磁体130-1至130-3,并且对于感测磁体80a和80b,可以应用感测磁体180a的描述。
[0523]
例如,第三镜头驱动设备可以是第一位置传感器170a被设置在外壳140中而不是图20b的镜头驱动设备100-2中的底座210中的实施例。
[0524]
为了减少第一镜头驱动设备100a和第二镜头驱动设备100c的驱动磁体30a至30b和31a至31c之间的磁场干扰,如图19a中所示,可以设置驱动磁体30a至30b、31a至31c以及感测磁体80a和80b。
[0525]
图19b示出了图18的双相机模块的另一实施例。另外,图19b示出了磁体30a、30b、30c、40a、40b、40c和40d以及感测磁体80a和80b的磁场。
[0526]
图19b的双相机模块可以包括第一镜头驱动设备100a和第二镜头驱动设备100b。第一镜头驱动设备可以表述成被替换为“第一相机模块”,第二镜头驱动设备可以表述成被替换为“第二相机模块”。
[0527]
第一镜头驱动设备100a可以与上文所述的相同,第二镜头驱动设备100b可以包括四个驱动磁体40a、40b、40c和40d。
[0528]
图20a示出了图18的双相机模块1000的又另一实施例。
[0529]
参考图20a,第一镜头驱动设备100-1和第二镜头驱动设备100-2中的每一个可以是根据图1的实施例的镜头驱动设备100。
[0530]
其中设置有假代构件135a和135b的第一镜头驱动设备100-1的第一外壳的第四侧部和其中设置有假代构件135a和135b的第二镜头驱动设备100-2的第二外壳的第四侧部可以设置成彼此相邻。
[0531]
另外,当从顶部观察时,第一镜头驱动设备100-1的第一假代件135a和135b可以设置在第一镜头驱动设备100-1的第三磁体130-3与第二镜头驱动设备100-2的第二假代件135a和135b之间。
[0532]
第一镜头驱动设备100-1的第一外壳的第四侧部141-4和第二镜头驱动设备100-2的第二外壳的第四侧部141-4可以设置成彼此相邻。
[0533]
例如,第一外壳的第四侧部和第二外壳的第四侧部可以设置成彼此平行,但其不限于此。
[0534]
第一镜头驱动设备100-1的第一假代件135a和135b和第二镜头驱动设备100-2的第二假代件135a和135b可以设置成彼此相邻。
[0535]
第一镜头驱动设备100-1的第一骨架和第二镜头驱动设备100-2的第二骨架可以
设置成彼此间隔开。
[0536]
第一镜头驱动设备100-1的第一磁体130-1可以设置在第一骨架的第一侧上,并且可以与第一骨架的第一侧间隔开或者被设置成与第一骨架的第一侧相邻。
[0537]
例如,第一镜头驱动设备100-1的第一磁体130-1可以设置在第一骨架(例如,第一骨架的第一侧)与第一外壳之间。例如,第一磁体130-1可以设置在第一外壳中以对应于第一骨架的第一侧。
[0538]
第一镜头驱动设备100-1的第二磁体130-2可以设置在第一骨架的面对第一骨架的第一侧的第二侧上,并且可以设置成与第一骨架的第二侧间隔开或者与第一骨架的第二侧相邻。
[0539]
例如,第一镜头驱动设备100-1的第二磁体130-2可以设置在第一骨架(例如,第一骨架的第二侧)与第一外壳之间。例如,第二磁体130-2可以设置在第一外壳中以对应于第一骨架的第二侧。
[0540]
第一镜头驱动设备100-1的第三磁体130-3可以设置在第一骨架的与第一骨架的第一侧相邻的第三侧上,并且可以设置成与第一骨架的第三侧间隔开或与第一骨架的第三侧相邻。
[0541]
例如,第三磁体130-3可以设置在第一骨架(例如,第一骨架的第三侧)与第一外壳之间。例如,第三磁体130-3可以设置在第一外壳中以对应于第一骨架的第三侧。
[0542]
第二镜头驱动设备100-2的第一磁体130-1可以设置在第二骨架的第一侧上,并且可以设置成与第二骨架的第一侧间隔开或者与第二骨架的第一侧相邻。
[0543]
例如,第二镜头驱动设备100-2的第一磁体130-1可以设置在第二骨架(例如,第二骨架的第一侧)与第二外壳之间。例如,第二镜头驱动设备100-2的第一磁体130-1可以设置在第二外壳中以对应于第二骨架的第一侧。
[0544]
第二镜头驱动设备100-2的第二磁体130-2可以设置在第二骨架的面对第二骨架的第一侧的第二侧上,并且可以设置成与第二骨架的第二侧间隔开或者与第二骨架的第二侧相邻。
[0545]
例如,第二镜头驱动设备100-2的第二磁体130-2可以设置在第二骨架(例如,第二骨架的第二侧)与第二外壳之间。例如,第二镜头驱动设备100-2的第二磁体130-2可以设置在第二外壳中以对应于第二骨架的第二侧。
[0546]
第二镜头驱动设备100-2的第三磁体130-3可以设置在第二骨架的与第二骨架的第一侧相邻的第三侧上,并且可以设置成与第二骨架的第三侧间隔开或与第二骨架的第三侧相邻。
[0547]
例如,第二镜头驱动设备100-2的第三磁体130-3可以设置在第二骨架(例如,第二骨架的第三侧)与第二外壳之间。例如,第二镜头驱动设备100-2的第三磁体130-3可以设置在第二外壳中以对应于第二骨架的第三侧。
[0548]
第一镜头驱动设备100-1的第一假代件135a和135b可以设置在第一骨架的面对第一骨架的第三侧的第四侧上,并且可以设置成与第一骨架的第四侧间隔开或与第一骨架的第四侧相邻。
[0549]
第二镜头驱动设备100-2的第二假代件135a和135b可以设置在第二骨架的与第二骨架的第三侧相对的第四侧上,并且可以设置成与第二骨架的第四侧间隔开或与第二骨架
的第四侧相邻。
[0550]
第一镜头驱动设备100-1的第一假代件135a和135b和第二镜头驱动设备100-2的第二假代件135a和135b可以设置成在从第一镜头驱动设备100-1的第三磁体130-3指向第二镜头驱动设备100-2的第三磁体130-3的方向上彼此重叠。
[0551]
或者,当从顶部观察时,第一镜头驱动设备100-1和第二镜头驱动设备100-2的假代构件135a和135b可以设置成在从第一骨架(例如,第四侧)指向第二骨架(例如,第四侧)的方向上彼此重叠。
[0552]
另外,第一镜头驱动设备110-1的第一位置传感器170和第二镜头驱动设备100-2的第一位置传感器170a可以设置在第一镜头驱动设备110-1的第一底座和第二镜头驱动设备100-2的第二底座的彼此相邻的区域中。
[0553]
此时,第一底座和第二底座的彼此相邻的区域可以对应于第一外壳和第二外壳的第四侧部(或第一骨架和第二骨架的第四侧)。
[0554]
第一镜头驱动设备110-1的感测线圈180(下文称为“第一感测线圈”)可以设置在第一骨架的对应于或面对第一外壳的第四侧部的任何侧部(或侧表面)上,例如,在第一骨架的第四侧上。
[0555]
第二镜头驱动设备110-2的感测线圈180(下文称为“第二感测线圈”)可以设置在第二骨架的对应于或面对第二外壳的第四侧部的任何侧部(或侧表面)上,例如,在第二骨架的第四侧上。
[0556]
第一感测线圈和第二感测线圈可以设置成彼此相邻。
[0557]
第一感测线圈可以设置在第一骨架的面对第一骨架的第三侧的第四侧上,并且第二感测线圈可以设置在第二骨架的面对第二骨架的第三侧的第四侧上。
[0558]
第一感测线圈和第二感测线圈可以设置成在从第一镜头驱动设备100-1的第三磁体130-3指向第二镜头驱动设备100-2的第三磁体130-3的方向上彼此重叠。
[0559]
或者,当从顶部观察时,第一感测线圈和第二感测线圈可以设置成在从第一骨架(例如,第四侧)指向第二骨架(例如,第四侧)的方向上彼此重叠。
[0560]
由于图20a的实施例包括感测线圈180而非图19a的感测磁体80a和80b,所以可以降低图19a的相邻感测磁体之间的磁场干扰的影响,因而,可以防止由于磁场干扰导致的af操作错误。
[0561]
参考20a和图1至图15c,相机模块1000可以包括第一相机模块100-1和第二相机模块100-2。
[0562]
第一相机模块100-1包括:100-1的第一骨架110;100-1的第一af线圈120,该第一af线圈被设置在100-1的第一骨架110上;100-1的第一磁体130,该第一磁体对应于100-1的第一af线圈120;100-1的第一感测线圈180,该第一感测线圈被设置在100-1的第一骨架110上;以及第一位置传感器170,该第一位置传感器对应于100-1的第一感测线圈180。
[0563]
第二相机模块100-2可以包括:100-2的第二骨架110,该第二骨架与100-2的第一骨架110间隔开;100-2的第二af线圈120,该第二af线圈被设置在第二骨架上;100-2的第二磁体130,该第二磁体对应于100-2的第二af线圈120;100-2的第二感测线圈180,该第二感测线圈被设置在100-2的第二骨架110上;以及第二位置传感器170a,该第二位置传感器对应于100-2的第二感测线圈180。
[0564]
100-1的第一感测线圈180和100-2的第二感测线圈180可以设置在彼此面对并且与100-1的第一骨架110和100-2的第二骨架110相邻的侧部上。
[0565]
或者,相机模块1000可以包括第一相机模块100-1和第二相机模块100-2。
[0566]
第一相机模块100-1可以包括:100-1的第一盖300;100-1的第一外壳140,该第一外壳被设置在100-1的第一盖300中;100-1的第一骨架110,该第一骨架被设置在100-1的第一外壳140内部;100-1的第一af线圈120,该第一af线圈被设置在100-1的第一骨架110上;100-1的第一磁体130,该第一磁体被设置在100-1的第一外壳140中并且对应于100-1的第一af线圈120;100-1的第一感测线圈180,该第一感测线圈被设置在100-1的第一骨架110上;100-1的第一底座210,该第一底座被设置在100-1的第一外壳140下方;以及第一位置传感器170,该第一位置传感器被设置在100-1的第一底座210上并且对应于100-1的第一感测线圈180。
[0567]
第二相机模块100-2可以包括:100-2的第二盖300;100-2的第一外壳140,该第一外壳被设置在100-2的第二盖300中;100-2的第二骨架110,该第二骨架被设置在100-2的第二外壳140内部;100-2的第二af线圈120,该第二af线圈被设置在100-2的第二骨架110上;100-2的第二磁体130,该第二磁体被设置在100-2的第二外壳140中并且对应于100-2的第二af线圈120;100-2的第二感测线圈180,该第二感测线圈被设置在100-2的第二骨架110上;100-2的第二底座210,该第二底座被设置在100-2的第二外壳140下方;以及100-2的第二位置传感器170a,该第二位置传感器被设置在100-2的第二底座210上并且对应于100-2的第二感测线圈180。
[0568]
100-1的第一感测线圈180和100-2的第二感测线圈180可以设置在彼此面对并且与100-1的第一骨架110和100-2的第二骨架110相邻的侧部上。
[0569]
100-1的第一感测线圈180和100-1的第一位置传感器170可以在光轴方向上彼此重叠,100-2的第二感测线圈180和100-2的第二位置传感器170可以在光轴方向上彼此重叠。
[0570]
100-1的第一盖300可以包括第一上板、从第一上板延伸并与100-2的第二盖300相邻的第一-第1侧板、以及面对第一-第1侧板定位的第一-第2侧板;并且100-2的第二盖300可以包括第二上板、从第二上板延伸并面对第一-第1侧板的第二-第1侧板、以及与第二-第1侧板相对定位的第二-第2侧板。
[0571]
100-1的第一感测线圈180更邻近第一-第1侧板而不是第一-第2侧板,100-2的第二感测线圈180可以更邻近第二-第1侧板而不是第二-第2侧板。
[0572]
100-1的第一盖300可以包括设置在第一-第1侧板与第一-第2侧板之间并且彼此面对的第一-第3侧板,以及第一-第4侧板。
[0573]
100-2的第二盖300可以包括被定位在第二-第1侧板与第二-第2侧板之间并且彼此面对的第二-第3侧板,以及第二-第4侧板。
[0574]
100-1的第一磁体130可以包括100-1的对应于第一-第3侧板的第一-第1磁体130-1、100-1的对应于第一-第4侧板的第一-第2磁体130-2、以及100-1的对应于第一-第2侧板的第一-第3磁体130-3。
[0575]
100-2的第二磁体130可以包括100-2的对应于第二-第3侧板的第二-第1磁体130-1、100-2的对应于第二-第4侧板的第二-第2磁体130-2、以及100-2的对应于第二-第2侧板
的第二-第3磁体130-3。
[0576]
100-1的第一假代件135a和135b可以设置在100-1的第一外壳140的与第一-第1侧板对应的任一个侧部(例如,100-1的第四侧部141-4)中,并且100-2的第二假代件135a和135b可以设置在100-2的第二外壳140的与第二-第1侧板对应的任一个侧部(例如,100-2的第四侧部141-4)中。
[0577]
100-1的第一外壳140的、100-1的第四侧部141-4以及100-2的第二外壳140的、100-2的第四侧部141-4可以设置成彼此面对。
[0578]
100-1的第一感测线圈180和100-2的第二感测线圈180可以设置在100-1的第一-第3磁体130-3和100-2的第二-第3磁体130-3之间。
[0579]
相机模块可以包括:100-1的第二-第1线圈230,该第二-第1线圈在光轴方向上与100-1的第一磁体130重叠;100-2的第二-第2线圈230,该第二-第2线圈在光轴方向上与100-2的第二磁体130重叠;第一电路板,该第一电路板与100-1的第一位置传感器170电连接;以及第二电路板,该第二电路板与100-2的第二位置传感器170电连接。
[0580]
图20b示出了图18的双相机模块1000的又一实施例。
[0581]
参考图20b,第一镜头驱动设备100-1可以是根据图1的实施例的镜头驱动设备100,并且第二镜头驱动设备100-2可以是根据图16的实施例的镜头驱动设备。
[0582]
在图20b中,第一镜头驱动设备100-1的感测线圈180和第二镜头驱动设备100-2的感测磁体180a可以设置成彼此相邻。由于感测线圈180与感测磁体180a之间的磁场干扰影响不大,所以本实施例可以防止由于磁场干扰而导致的af操作错误。
[0583]
在根据另一实施例的另一双相机模块中,第二镜头驱动设备100-2可以代替图20b中的第一镜头驱动设备100-1,此时,第一镜头驱动设备和第二镜头驱动设备的感测磁体可以彼此相邻,并且可以如图19a中所示地设置成彼此面对。
[0584]
参考图20b和图1至图15c,相机模块1000可以包括第一相机模块100-1和第二相机模块100-2。
[0585]
第一相机模块100-1可以包括:100-1的第一骨架110;100-1的第一af线圈120,该第一af线圈被设置在100-1的第一骨架110上;100-1的第一磁体130,该第一磁体对应于100-1的第一af线圈120;100-1的第一感测线圈180,该第一感测线圈被设置在100-1的第一骨架110上;以及第一位置传感器170,该第一位置传感器对应于100-1的第一感测线圈180。
[0586]
第二相机模块100-2可以包括:100-2的第二骨架110;100-2的第二af线圈120,该第二af线圈被设置在100-2的第二骨架110上;100-2的第二磁体130,该第二磁体对应于100-2的第二af线圈120;100-2的感测磁体180a,该感测磁体被设置在100-2的第二骨架110上;以及第二位置传感器170a,该第二位置传感器对应于感测磁体180a。
[0587]
100-1的第一感测线圈180和感测磁体180a可以设置在100-1的第一骨架110和100-2的第二骨架110的彼此面对并且彼此相邻的侧部上。
[0588]
或者,相机模块1000可以包括第一相机模块100-1和第二相机模块100-2。
[0589]
第一相机模块100-1可以包括:100-1的第一盖300;100-1的第一外壳140,该第一外壳被设置在100-1的第一盖300中;100-1的第一骨架110,该第一骨架被设置在100-1的第一外壳140中;100-1的第一af线圈120,该第一af线圈被设置在100-1的第一骨架110上;100-1的第一磁体130,该第一磁体被设置在100-1的第一外壳140中并且对应于100-1的第
一af线圈120;100-1的第一感测线圈180,该第一感测线圈被设置在100-1的第一骨架110上;100-1的第一底座210,该第一底座被设置在100-1的第一外壳140下方;以及第一位置传感器170,该第一位置传感器被设置在100-1的第一底座210上并且对应于100-1的第一感测线圈180。
[0590]
第二相机模块100-2可以包括:100-2的第二盖300;100-2的第一外壳140,该第一外壳被设置在100-2的第二盖300中;100-2的第二骨架110,该第二骨架被设置在100-2的第二外壳140中;100-2的第二af线圈120,该第二af线圈被设置在100-2的第二骨架110上;100-2的第二磁体130,该第二磁体被设置在100-2的第二外壳140中并且对应于100-2的第二af线圈120;100-2的感测磁体180a,该感测磁体被设置在100-2的第二骨架110上;100-2的第二底座210,该第二底座被设置在100-2的第二外壳140下方;以及第二位置传感器170a,该第二位置传感器被设置在100-2的第二底座210上并且对应于感测磁体180a。
[0591]
100-1的第一感测线圈180和100-1的第一位置传感器170可以在光轴方向上彼此重叠,并且100-2的感测磁体180a和第二位置传感器170可以在光轴方向上彼此重叠。
[0592]
100-1的第一盖300可以包括第一上板、从第一上板延伸并与100-2的第二盖300相邻的第一-第1侧板、以及与第一-第1侧板相对定位的第一-第2侧板;并且100-2的第二盖300可以包括第二上板、从第二上板延伸并面对第一-第1侧板的第二-第1侧板、以及与第二-第1侧板相对定位的第二-第2侧板。
[0593]
100-1的第一感测线圈180更邻近第一-第1侧板而不是第一-第2侧板,并且感测磁体180a可以更邻近第二-第1侧板而不是第二-第2侧板。
[0594]
至于100-1的第一盖300的第一-第1侧板至第一-第4侧板和100-2的第二盖300的第二-第1侧板至第二-第4侧板、100-1的第一-第1磁体130-1至第一-第3磁体130-3的设置;100-2的第二-第1磁体130-1至第二-第3磁体130-3的设置;以及100-1、100-2的第一假代件135a和第二假代件135b的设置,可以应用或比照应用对图20a的说明。
[0595]
100-1的第一感测线圈180和感测磁体180a可以设置在100-1的第一-第3磁体130-3与100-2的第二-第3磁体130-3之间。
[0596]
图20c示出了图18的双相机模块1000的又一实施例。
[0597]
参考图20c,第一镜头驱动设备100-1和第二镜头驱动设备100-2可以是根据图16的实施例的镜头驱动设备。
[0598]
在图20c中,第一镜头驱动设备100-1的感测磁体180a和第二镜头驱动设备100-2的感测磁体180a可以设置成彼此相邻。
[0599]
至于图20c中100-1的第一感测磁体180a和100-2的第二感测磁体180a的设置,可以应用或比照应用对图20a中的第一感测线圈和第二感测线圈的设置关系。
[0600]
图21是根据本发明的第一实施例的便携式终端200a的透视图,并且图22是图21中所示的便携式终端200a的框图。
[0601]
参考图21和图22,便携式终端200a(下文称为“终端”)可以包括本体850、无线通信单元710、a/v输入单元720、感测单元740、输入/输出单元750、存储器单元760、接口单元770、控制单元780以及电源单元790。
[0602]
图21中所示的本体850为直板的形式,但其不限于此,可以是诸如滑盖式、折叠式、摆动式、旋转式等各种结构,其中两个或更多个子主体被耦接而能够相对于彼此移动。
[0603]
本体850可以包括形成外观的壳(壳体、外壳、盖等)。例如,本体850可以分为前壳851和后壳852。终端的各种电子组件可以内置在前壳851和后壳852之间形成的空间中。
[0604]
无线通信单元710可以被配置成包括一个或多个模块,使得能够在终端200a与无线通信系统之间或者在终端200a与该终端200a所在的网络之间进行无线通信。例如,无线通信单元710可以被配置成包括广播接收模块711、移动通信模块712、无线互联网模块713、近场通信模块714以及地理定位模块715。
[0605]
音频/视频(a/v)输入单元720用于输入音频信号或视频信号,并且可以包括相机721、麦克风722等。
[0606]
相机721可以包括根据图17或图18中所示的实施例的相机模块200和1000。
[0607]
感测单元740可以通过检测终端200a的当前状态,例如终端200a的打开/关闭状态、终端200a的位置、是否存在用户接触、终端200a的定向、终端200a的加速/减速等,产生用于控制终端200a的操作的感测信号。例如,当终端200a为滑盖手机的形式时,可以感测滑盖手机是打开还是关闭的。另外,感测单元负责感测与电源单元790是否被供电、接口单元770是否耦接到外部设备等相关的功能。
[0608]
输入/输出单元750用于产生与视觉、听觉或触摸相关的输入或输出。输入/输出单元750可以产生用于终端200a的操作控制的输入数据,另外,可以显示由终端200a处理的信息。
[0609]
输入/输出单元750可以包括小键盘单元730、显示模块751、声音输出模块752和触摸屏面板753。小键盘单元730可以响应于小键盘输入而产生输入数据。
[0610]
显示模块751可以包括其颜色根据电信号而改变的多个像素。例如,显示模块751可以包括液晶显示器、薄膜晶体管-液晶显示器、有机发光二极管、柔性显示器和3d显示器中的至少一种。
[0611]
声音输出模块752可以在呼叫信号接收、呼叫模式、记录模式、语音识别模式或广播接收模式等中输出从无线通信单元710接收到的音频数据,或者可以输出存储器单元760中存储的音频数据。
[0612]
触摸屏面板753可以将由于用户在触摸屏的特定区域上的触摸而产生的电容变化转换为电输入信号。
[0613]
存储器单元760可以存储用于处理和控制控制单元780的程序,并且可以临时存储输入/输出数据(例如,电话簿、消息、音频、静止图像、照片、视频等)。例如,存储器单元760可以存储由相机721拍摄的图像,例如照片或视频。
[0614]
接口单元770用作用于连接到外部设备的通路,外部设备被连接到终端200a。接口单元770从外部设备接收数据,接收电力并将其传输到终端200a内部的每个组件,或者将终端200a内部的数据传输到外部设备。例如,接口单元770可以包括有线/无线头戴式耳机端口、外部充电器端口、有线/无线数据端口、存储器卡端口、用于连接具有识别模块的设备的端口,以及音频输入/输出(i/o)端口、视频输入/输出(i/o)端口、耳机端口等。
[0615]
控制单元780可以控制终端200a的整体操作。例如,控制单元780可以对语音呼叫、数据通信、视频呼叫等执行相关的控制和处理。
[0616]
控制单元780可以包括用于播放多媒体的多媒体模块781。多媒体模块781可以在控制单元780中实现或者可以与控制单元780分开实现。
[0617]
控制单元780可以执行能够将在触摸屏上执行的手写输入或绘图输入分别识别为字符和图像的模式识别处理。
[0618]
电源单元790可以在控制单元780的控制下接收外部电力或内部电力,以供应每个组件操作所需的电力。
[0619]
根据本发明第一实施例的镜头驱动设备可以包括本发明第二实施例的感测结构。更详细地,根据本发明第一实施例的镜头驱动设备可以包括根据本发明第二实施例的感测线圈2180和位置传感器2170。根据本发明第一实施例的镜头驱动设备可以包括根据本发明的第三实施例的基板3600和下弹性部分材料3520。
[0620]
图23是根据本发明的第二实施例的镜头驱动设备2100的分解图,图24是去掉了盖构件2300的镜头驱动设备2100的透视图。
[0621]
参考图23和图24,镜头驱动设备2100可以包括骨架2110、线圈2120、感测线圈2180、磁体2130、外壳2140以及位置传感器2170。
[0622]
镜头驱动设备2100可以还包括与位置传感器2170电连接的端子部分2190。
[0623]
镜头驱动设备2100可以还包括上弹性构件2150、下弹性构件2160以及底座2210中的至少一个。
[0624]
另外,镜头驱动设备2100可以还包括平衡线圈(未示出),用于减轻感测线圈2180的重量或磁场的影响。
[0625]
另外,镜头驱动设备2100可以还包括盖或盖构件2300。
[0626]
由于本实施例提供了用于使用感测线圈或驱动线圈(代替感测磁体)来检测af移动部分的位置的磁场,所以可以防止感测磁体与磁场之间的干扰。
[0627]
首先,将描述骨架2110。
[0628]
骨架2110被设置在外壳2140的内侧,并且线圈2120和磁体2130可以通过线圈2120与磁体2130之间的电磁相互作用而在光轴oa方向上或在第一方向(例如,z轴方向)上移动。
[0629]
图25a是骨架2110的第一透视图,图25b是骨架2110的第二透视图,图25b是骨架2110和线圈2120的组装透视图。
[0630]
参考图25a至图25c,骨架2110可以具有用于安装镜头或镜筒的开口或中空部。例如,骨架2110的开口可以是贯穿骨架2110的通孔的形式,并且骨架2110的开口可以具有圆形形状、椭圆形状或多边形形状,但其不限于此。例如,骨架2110的开口可以是在光轴方向上贯穿骨架2110的孔的形式。
[0631]
镜头可以直接安装到骨架2110的开口,但其不限于此,并且在另一实施例中,至少一个镜头所安装或耦接到的镜筒可以被耦接或安装到骨架2110的开口。镜头或镜筒可以通过各种方式耦接到骨架2110的内周表面。例如,在骨架2110的内侧表面上可以形成有用于耦接镜头或镜头模块的螺纹,但在另一实施例中,可以不形成螺纹。
[0632]
骨架2110可以包括彼此间隔开的多个侧部2110b1至2110b4和2110c1至2110c4,并且所述多个侧部2110b1至2110b4和2110c1至2110c4可以彼此连接。
[0633]
例如,骨架2110可以包括对应于外壳2140的侧部2141-1至2141-4的侧部2110b1至2110b4以及对应于外壳2140的拐角部2142-1至2142-4的拐角部2110c1至2110c4(或拐角)。
[0634]
线圈2120被设置、安装或安放于其内的至少一个安放凹槽2105可以设置在骨架2110的外侧表面上。
[0635]
例如,安放凹槽2105可以形成在骨架2110的侧部2110b1至2110b4和2110c1至2110c4的外侧表面上。安放凹槽2105可以具有从骨架2110的侧部2110b1至2110b4和2110c1至2110c4的外侧表面凹进的结构,并且可以具有与线圈2120的形状相匹配的形状。
[0636]
例如,线圈2120可以直接缠绕或缠绕在骨架2110的凹槽2105周围,以相对于光轴oa进行顺时针或逆时针旋转。
[0637]
骨架2110的凹槽2105的形状和数目可以对应于设置在骨架2110的外侧表面上的线圈的形状和数目。在另一实施例中,骨架2110可以没有用于安放线圈的凹槽,并且线圈2120可以不带凹槽地直接缠绕在骨架2110的外侧表面上,或者可以被缠绕和固定。
[0638]
用于穿过线圈2120的视线(例如,一端)或垂直线(例如,另一端)的凹槽2106可以形成在骨架2110的外侧表面的下端处。
[0639]
用于避免与上弹性构件2150的第一框架连接部分2153发生空间干涉的第一避让凹槽2122a可以设置在骨架2110的上表面上,并且用于避免与下弹性构件2150的第二框架连接部分2163发生空间干涉的第二避让凹槽2122b可以设置在骨架2110的下表面上。例如,第一避让凹槽2122a和第二避让凹槽122b可以形成在骨架2110的拐角部中,但其不限于此,在另一实施例中,第一避让凹槽2122a和第二避让凹槽122b可以形成在骨架2110的侧部中。
[0640]
虽然图25a至图25c中未示出,但骨架2110可以包括从上表面突出的第一止挡件和从下表面突出的第二止挡件。当骨架2110在第一方向上移动以实现自动对焦功能时,骨架2110的第一止挡件和第二止挡件可以防止骨架2110的上表面与盖构件2300的上板的内侧直接碰撞,即使骨架2110由于外部冲击等而移动超出规定范围也是如此,并且可以防止骨架2110的下表面与底座2210直接碰撞。
[0641]
用于耦接和固定到上弹性构件2150的第一耦接部分2113可以设置在骨架2110的上表面、上部或上端上;并且,用于耦接和固定到下弹性构件2160的第二耦接部分2117可以设置在骨架2110的下表面上。
[0642]
例如,在图25a至图25c中,骨架2110的第一耦接部分2113具有凹槽形状,并且第二耦接部分2117可以具有突起形状,但其不限于此,在另一实施例中,骨架2110的第一耦接部分和第二耦接部分中的每一个可以具有凹槽、平坦表面或突起形状。
[0643]
用于与镜头或镜筒耦接的螺纹可以设置在骨架2110的内周表面上。在骨架2110通过夹具等固定的状态下,螺纹可以形成在骨架2110的内周表面上,并且用于固定夹具的凹槽2119可以设置在骨架2110的上表面上。
[0644]
骨架2110可以包括感测线圈2180被安放、设置或插入于其内的凹槽部2025。
[0645]
凹槽部2025可以形成在骨架2110的下部、下表面或下端上。
[0646]
凹槽部2025可以从骨架2110的下表面凹进。例如,凹槽部2025可以形成在骨架2110的任一个拐角部中。
[0647]
例如,凹槽部2025可以形成在骨架2110的第二拐角部2110c2的下部处。凹槽部2025可以包括至少一个开口。例如,凹槽部2025可以包括朝向底座2210敞开的第一开口。另外,凹槽部2025可以包括朝向骨架2110的外侧表面敞开的至少一个第二开口。
[0648]
另外,骨架2110可以包括至少一个突起2026以耦接到感测线圈2180。
[0649]
例如,突起2026可以设置在凹槽部2025中。例如,突起2026可以从凹槽部2025的上表面向下突出或者在朝向位置传感器2170(或底座2210)的方向上突出。
[0650]
为了安装平衡线圈,骨架2110可以还包括位于凹槽部2025的相反侧的单独凹槽部。
[0651]
接下来,将描述线圈2120。
[0652]
线圈2120可以设置在骨架2110上,被耦接到或连接到骨架2110,或者被骨架2110支撑。
[0653]
例如,线圈2120可以设置在骨架2110的外侧表面上。
[0654]
线圈2120可以设置成围绕骨架2110的外侧表面,从而以光轴为中心顺时针或逆时针旋转。例如,线圈2120可以设置或缠绕在设置于骨架2110的外侧表面上的凹槽2105中。
[0655]
例如,线圈2120可以具有闭合曲线或是具有中心孔的环形状。
[0656]
在另一实施例中,线圈2120可以以围绕垂直于光轴的轴线在顺时针或逆时针方向上缠绕的线圈环的形式来实现,并且线圈环的数目可以与磁体2130的数目相同,但其不限于此。
[0657]
线圈2120与设置在外壳2140中的磁体2130进行电磁相互作用。为了通过与磁体2130的相互作用产生电磁力,可以向线圈2120施加电力或驱动信号。
[0658]
被提供给线圈2120的电力或驱动信号可以是dc信号或ac信号,或者可以包括dc信号和ac信号,并且可以是电压或电流的形式。
[0659]
当向线圈2120供应驱动信号(例如,驱动电流)时,可以通过线圈2120与磁体2130之间的电磁相互作用来形成电磁力,并且由上弹性构件2150和下弹性构件2160支撑的骨架2110可以通过所产生的电磁力在光轴oa方向上移动。
[0660]
由于控制了被提供给线圈2120的驱动信号,所以可以控制骨架2110在第一方向上的移动,因而可以执行自动对焦功能。
[0661]
在af移动部分的初始位置处,骨架2110可以在向上或向下方向(例如,z轴方向)上移动,这被称为af移动部分的双向驱动。或者,在af移动部分的初始位置处,骨架2110可以在向上方向上移动,这被称为af移动部分的单向驱动。
[0662]
af移动部分可以包括骨架2110和耦接到骨架2110的组件。例如,af移动部分可以包括骨架2110、线圈2120和感测线圈2180。另外,af移动部分可以还包括被安装在骨架2110上的镜头。
[0663]
并且,af移动部分的初始位置是在未将电力施加到线圈2120的状态下所述af移动部分的初始位置,或者可以是在上弹性构件2150和下弹性构件2160仅通过af移动部分的重量弹性变形时所述af移动部分被放置的位置。
[0664]
除此之外,骨架2110的初始位置可以是当重力在从骨架2110到底座2210的方向上作用时所述af移动部分被放置的位置,或者相反地,该初始位置可以是当重力在从底座2210朝向骨架2110的方向上作用时所述af移动部分被放置的位置。
[0665]
在af移动部分的初始位置处,线圈2120可以垂直于光轴,并且可以在从光轴朝向线圈2120的方向上与磁体2130面对或重叠。
[0666]
线圈2120可以电连接到上弹性构件2150和下弹性构件2160中的至少一个。可以将驱动信号通过上弹性构件2150和下弹性构件2160中的至少一个而施加到线圈2120。例如,可以将驱动信号通过下弹性构件2160的两个弹性构件2160-1和2160-2提供给线圈2120。
[0667]
感测线圈2180可以与线圈2120间隔开并且设置在线圈2120下方。
[0668]
感测线圈2180可以在光轴方向上与线圈2120的一部分重叠。在另一实施例中,感测线圈2180可以不与线圈2120在光轴方向上重叠。
[0669]
另外,本实施例可以包括平衡线圈(未示出),该平衡线圈设置在骨架2110a上而定位在感测线圈2180的相反侧,从而平衡感测线圈2180的重量。该平衡感测线圈可以用于抵消感测线圈2180的磁场影响并与感测线圈2180平衡重量,因此,可以执行准确的af操作。
[0670]
例如,该平衡线圈可以具有与感测线圈2180相同的重量并且二者可以具有相同的形状,但其不限于此,在其它实施例中,二者可以具有不同的形状。
[0671]
另外,例如,感测线圈2180可以设置在骨架2110的任一个侧部和/或拐角部上。感测线圈2180可以设置在骨架2110的凹槽部2025中,并且可以耦接到突起2026或缠绕在突起2026上。
[0672]
感测线圈2180可以提供磁场以供位置传感器2170检测,并且为了产生这样的磁场,可以向感测线圈2180提供驱动信号或电力。提供给感测线圈2180的驱动信号可以包括直流信号和交流信号中的至少一种。另外,该驱动信号可以是电流或电压的形式。
[0673]
感测线圈2180可以包括圆形形状、椭圆形状和闭合曲线形状中的至少一种。例如,感测线圈2180可以是围绕光轴或平行于光轴的轴线缠绕的线圈环的形式。
[0674]
例如,感测线圈2180可以具有包括中心孔的环形状,并且该中心孔可以平行于光轴。或者,感测线圈2180的中心孔可以面对骨架2110的凹槽部2025(或突起2026),并且可以耦接到突起2026。
[0675]
例如,感测线圈2180的中心孔的直径(例如,最大直径)可以小于线圈2120的环的直径(例如,最小直径)。
[0676]
例如,感测线圈2180可以包括第一部2009a、设置在第一部2009a下方的第二部2009b、以及连接第一部2009a和第二部2009b的第三部2009c。
[0677]
感测线圈2180的第三部2009c可以包括将第一部2009a的一端与第二部2009b的一端彼此连接的第一连接部、以及将第一部的另一端与第二部的另一端彼此连接的第二连接部。
[0678]
例如,感测线圈2180的第一部2009a和第二部2009b中的每一个可以具有“直线形状”,并且感测线圈2180的第三部2009c可以具有曲线形状或弯曲形状。
[0679]
由于线圈2120与磁体2130之间的相互作用,感测线圈2180可以与骨架2110一起在光轴oa方向上移动,位置传感器2170可以检测在光轴方向上移动时的感测线圈2180的磁场强度,并且可以输出根据感测结果的输出信号。
[0680]
例如,由位置传感器2170检测到的感测线圈2180的磁场强度或磁力可以根据骨架2110在光轴方向上的位移而改变,位置传感器2170可以输出与检测到的磁场的强度成比例的输出信号,并且可以使用位置传感器2170的输出信号来检测骨架2110在光轴方向上的位移。
[0681]
例如,相机模块的控制单元2410或终端的控制单元2780可以基于从位置传感器2170输出的输出信号来检测骨架2110a在光轴方向上的位移。
[0682]
被布置在骨架2110的凹槽部2025中的感测线圈2180的至少一部分可以通过骨架2110a的第一开口和第二开口从骨架2110露出。
[0683]
例如,感测线圈2180的下部或下表面的至少一部分可以从骨架2110露出,并且可
以在光轴方向上与位置传感器2170面对或重叠。
[0684]
例如,感测线圈2180的第一部2009a和第二部2009b中的至少一个可以在光轴方向上与位置传感器2170重叠。或者,感测线圈2180的中心孔的至少一部分可以在光轴方向上与位置传感器2170重叠。
[0685]
接下来,将描述外壳2140。
[0686]
外壳2140将骨架2110的至少一部分容纳在内侧上,并支撑磁体2130。
[0687]
图26a是外壳2140的透视图,图26b是外壳2140和磁体2130的第一透视图,图26c是外壳2140和磁体2130的第二透视图。
[0688]
参考图26a至图26c,外壳2140可以设置在盖构件2300的内侧,并且可以设置在盖构件2300与骨架2110之间。外壳2140可以将骨架2110容纳在内侧。外壳2140的外侧表面可以与盖构件2300的侧板2302的内表面间隔开,但其不限于此,在其它实施例中,二者可以彼此接触。
[0689]
外壳2140可以具有开口或包括中空部的中空柱形状。
[0690]
例如,外壳2140可以具有多边形(例如,正方形或八边形)开口或圆形开口,并且外壳2140的开口可以是在光轴方向上贯穿外壳2140的通孔的形式。
[0691]
外壳2140可以包括多个侧部2141-1至2141-4和多个拐角部2142-1至2142-4。这里,“侧部”可以表述成被替换为“第一侧部”,并且拐角部可以表述成被替换为“第二侧部”。另外,拐角部可以表述成被替换为“柱部”。
[0692]
例如,外壳2140可以包括第一侧部2141-1至第四侧部2141-4和第一拐角部2142-1至第四拐角部2142-4。
[0693]
例如,外壳2140的侧部2141-1至2141-4可以是对应于外壳2140的侧面的部分,并且外壳2140的拐角部2142-1至2142-4可以是对应于的外壳2140的拐角的部分。
[0694]
例如,外壳2140的拐角部2142-1至2142-4中的每个拐角部的内侧表面可以是平坦的、倒角的或成曲线的。
[0695]
第一侧部2141-1至第四侧部2141-4可以彼此间隔开。外壳2140的拐角部2142-1至2142-4中的每个拐角部可以被放置或定位在两个相邻的侧部2141-1和2141-3、2141-1和2141-4、2141-4和2141-2以及2141-2和2141-3之间,并且可以将侧部2141-1至2141-4彼此连接。
[0696]
例如,拐角部2142-1至2142-4可以位于外壳2140的拐角或边缘处。例如,外壳2140的侧部的数目为四个,拐角部的数目为四个,但其不限于此。
[0697]
外壳2140的侧部2141-1至2141-4中的每个侧部可以设置成平行于盖构件2300的侧板中的对应一个侧板。
[0698]
外壳2140的侧部2141-1至2141-4中的每个侧部的水平长度可以大于拐角部2142-1至2142-4中的每个拐角部的水平长度,但其不限于此。
[0699]
外壳2140的第一侧部2141-1和第二侧部2141-2可以被定位成彼此相对,并且第三侧部2141-3和第四侧部2141-4可以被定位成彼此相对。外壳2140的第三侧部2141-3和第四侧部2141-4中的每个侧部可以定位在第一侧部2141-1和第二侧部2141-2之间。
[0700]
为了防止上板2301与盖构件2300的内侧表面直接碰撞,可以在外壳2140的上部、上端或上表面上设置有止挡件2143。
[0701]
例如,止挡件2143可以设置在外壳2140的拐角部2142-1至2142-4中的每个拐角部的上表面(例如,第一表面251a)上,但其不限于此。
[0702]
例如,为了防止外壳2140的下表面与底座2210碰撞,外壳2140可以还包括从下表面突出的止挡件(未示出)。
[0703]
耦接到上弹性构件2150的第一外侧框架2152的至少一个第一耦接部分2144可以设置在外壳2140的上部、上端或上表面上。另外,耦接到并固定到下弹性构件2160的第二外侧框架2160的至少一个第二耦接部分2147可以设置在外壳2140的下部、下端或下表面上。
[0704]
在图26a至图26c中,外壳2140的第一耦接部分2144和第二耦接部分2147中的每个耦接部分可以具有突起形状,但其不限于此,并且在另一实施例中,外壳2140的第一耦接部分和第二耦接部分中的每个耦接部分可以是平坦表面、凹槽或突起中的任一个。
[0705]
外壳2140的第一耦接部分2144的孔2152a和上弹性构件2150的第一外侧框架2152可以使用热熔或粘合剂彼此耦接,并且外壳2140的第二耦接部分2147和下弹性构件2160的第二外侧框架2162的孔2162a可以彼此耦接。
[0706]
外壳2140的侧部2141-1至2141-4中的至少一个侧部可以设置有安放部2141a,磁体2130可以设置或安装在该安放部中。
[0707]
图26a中的安放部2141a可以是贯穿外壳2140的侧部2141-1至2141-4的开口或通孔的形式,但其不限于此,在另一实施例中,该安放部可以是凹槽或凹形凹槽的形式。
[0708]
外壳2140可以包括与安放部2141a相邻的支撑部2018,以支撑磁体2130的面向线圈2120的第一表面的边缘。
[0709]
支撑部2018可以被定位成与外壳2140的内侧表面相邻,并且可以具有关于安放部2141a的侧表面在水平方向上突出的形状。另外,例如,支撑部2018可以包括锥形部或倾斜表面。在另一实施例中,外壳2140可以不包括支撑部2018。
[0710]
例如,磁体2130可以通过粘合剂附接或固定到安放部2141a。
[0711]
例如,第一凹槽2118可以设置在外壳2140的拐角部的下部、下表面或下端中,并且与外壳2140的第一凹槽2118相对应的第一凹槽2218可以设置在底座2210的上表面的拐角处。诸如硅树脂或环氧树脂的粘合剂(未示出)可以设置在外壳2140的第一凹槽2118与底座2210的第二凹槽2218之间,因而,外壳2140和底座2210可以彼此耦接。
[0712]
在另一实施例中,可以设置从底座2210的上表面突出的突出部分来代替底座2210的第二凹槽2218。
[0713]
接下来,将描述磁体2130。
[0714]
磁体2130可以设置在外壳2140中。例如,磁体2130可以设置在骨架2110与外壳2140之间。
[0715]
磁体2130可以包括多个磁体或磁体单元2130-1至2130-4。
[0716]
例如,磁体2130可以包括第一磁体2130-1至第四磁体2130-4,但其不限于此。在另一实施例中,磁体单元的数目可以是两个或更多个,例如,磁体可以包括设置在外壳2140的彼此相对定位的两个侧部上的两个磁体单元。
[0717]
磁体单元2130-1至2130-4可以设置在外壳2140的侧部2141-1至2141-4上。
[0718]
例如,第一磁体单元2130-1至第四磁体单元2130-4中的每一个可以设置在外壳2140的第一侧部2141-1至第四侧部2141-4中的对应安放部2141a中的任一个安放部中。
[0719]
第一磁体单元2130-1和第三磁体单元2130-3可以被定位成与外壳2140的第一拐角部2142-1相邻,第二磁体单元2130-2和第四磁体单元2130-4可以被定位成与在对角方向上面对第一拐角部2142-1的第三拐角部2142-3相邻。
[0720]
例如,第一磁体单元2130-1的一部分和第三磁体单元2130-3的一部分可以设置成延伸到外壳2140的第一拐角部2141-1,并且第二磁体2130-2的一部分和第四磁体2130-4的一部分可以设置成延伸到外壳2140的第三拐角部2141-3。
[0721]
例如,第一磁体单元2130-1可以设置成更邻近第一拐角部2142-1而不是第二拐角部2142-2,第二磁体单元2130-2可以设置成更邻近第三拐角部2142-3而不是第四拐角部2142-4,第三磁体单元2130-3可以设置成更邻近第一拐角部2142-1而不是第四拐角部2142-4,并且,第四磁体单元2130-4可以设置成更邻近第三拐角部2142-3而不是第二拐角部2142-2。
[0722]
在另一实施例中,每个磁体单元可以设置成被定位在离外壳2140的两个侧拐角部相同的距离处。
[0723]
在af移动部分(例如,骨架2110)的初始位置处,磁体2130可以设置在外壳2140的侧部2141-1至2141-4中,以对应于或面对线圈2120。
[0724]
磁体单元2130-1至2130-4中的每一个可以具有与外壳2140的侧部2141-1至2141-4的外侧表面相对应的形状,例如,作为整体的多面体(例如,长方体)形状,但其不限于此。
[0725]
磁体单元2130-1至2130-4中的每一个可以是单极磁化磁体或双极磁体,该双极磁体具有两个不同极性以及在不同极性之间自然形成的边界表面。
[0726]
例如,磁体单元2130-1至2130-4中的每个磁体单元为单极磁化磁体,其被设置成面对线圈2120的第一表面为n极,与第一表面相对的第二表面为s极,但其不限于此,n极和s极可以互换。
[0727]
在另一实施例中,为了提高电磁力,磁体单元2130-1至2130-4中的每一个可以是包括两个n极和两个s极的4极磁体或双极磁化磁体。此时,磁体单元2130-1至2130-4中的每个磁体单元可以用铁氧体、铝镍钴合金、稀土磁体等来实现,但其不限于此。
[0728]
当磁体单元2130-1至2130-4被双极磁化时,磁体单元2130-1至2130-4中的每一个可以包括第一磁体部分、第二磁体部分、以及设置在第一磁体部分与第二磁体部分之间的分隔壁。
[0729]
第一磁体部分可以包括n极、s极以及n极和s极之间的第一边界表面。此时,第一边界表面可以包括几乎没有磁性的一部分,作为基本没有磁性的部分,并且它可以是自然发生的部分以形成由一个n极和一个s极构成的磁体。
[0730]
第二磁体部分可以包括n极、s极以及n极和s极之间的第二边界表面。此时,第二边界表面可以包括几乎没有极性的一段作为基本没有磁性的部分,并且可以是自然发生的部分以形成由一个n极和一个s极构成的磁体。
[0731]
分隔壁将第一磁体部分和第二磁体部分分开或隔开,是基本不具有磁性的部分,并且可以是几乎没有极性的部分。例如,分隔壁可以是非磁性材料、空气等。例如,分隔壁可以被表述为“中性区”或“中性区域”。
[0732]
分隔壁是在第一磁体部分和第二磁体部分被磁化时人工形成的部分,分隔壁的宽度可以大于第一边界表面和第二边界表面中的每个边界表面的宽度。这里,分隔壁的宽度
可以是分隔壁在从第一磁体部分指向第二磁体部分的方向上的长度。
[0733]
接下来,将描述上弹性构件2150、下弹性构件2160、底座2210、位置传感器2170和端子2180。
[0734]
图27是外壳2140、磁体2130和上弹性构件2150的透视图,图28是下弹性构件2160、位置传感器2170、端子部分2190以及底座的分解透视图,图29是与位置传感器2170和端子部分2190耦接的底座2210的透视图,图30是下弹性构件2160、端子部分2190以及底座2210的组合透视图,图31是沿图24的方向ab截取的镜头驱动设备2100的剖视图,图32是沿图24的方向cd截取的镜头驱动设备2100的剖视图。
[0735]
参考图27至图32,上弹性构件2150和下弹性构件2160可以构成弹性构件,该弹性构件可以耦接到骨架2110和外壳2140,并且弹性构件可以将骨架2110弹性地支撑在外壳2140上。
[0736]
上弹性构件2150可以耦接到骨架2110的上部、上表面或上端以及外壳2140的上部、上表面或上端。下弹性构件2160可以耦接到骨架2110的下部、下表面或下端以及外壳2140的下部、下表面或下端。在上弹性构件和下弹性构件中,弹性构件可以用“弹性单元”、“弹簧”或“弹性本体”代替。
[0737]
在图27中,上弹性构件2150可以具有单个结构而不是分成多个,但其不限于此,在另一实施例中,上弹性构件2150可以包括彼此间隔开的多个弹性单元。
[0738]
上弹性构件2150可以还包括:第一内侧框架2151,该第一内侧框架耦接到骨架2110;第一外侧框架2152,该第一外侧框架耦接到外壳2140;以及第一框架连接部分2153,该第一框架连接部分连接第一内侧框架2151和第一外侧框架2152。此时,内侧框架可以表述成被代替为“内侧部分”,外侧框架可以表述成被代替为“外侧部”,框架连接部分可以表述成被代替为“连接部分”。
[0739]
用于与骨架2110的第一耦接部分2113耦接的孔2151a可以设置在上弹性构件2150的第一内侧框架2151中,用于与外壳2140的第一耦接部分2144耦接的孔2152a可以设置在第一外侧框架2152中。
[0740]
下弹性构件2160可以包括两个或更多个分开或分离的弹性构件,并且可以耦接到骨架2110。例如,弹性构件可以被表述为“下弹性构件”、“弹性单元”或“弹簧”。
[0741]
例如,下弹性构件2160可以包括彼此间隔开的第一弹性构件2160-1至第四弹性构件2160-4,并且第一弹性构件2160-1至第四弹性构件2160-4可以彼此电气分离。
[0742]
第一弹性构件2160-1至第四弹性构件2160-4中的至少一个可以包括:第二内侧框架2161,该第二内侧框架耦接到骨架2110的下部;第二外侧框架2162,该第二外侧框架耦接到外壳2140的下部;以及第二框架连接部分2163,该第二框架连接部分连接第二内侧框架2161和第二外侧框架2162。
[0743]
线圈2120和感测线圈2180中的每一个可以电连接到上弹性构件2150和下弹性构件2160中的至少一个。
[0744]
例如,线圈2120可以电连接到第一弹性构件2160-1和第二弹性构件2160-2。例如,线圈2120的一端(或第一端部)可以通过焊接或导电构件耦接到第一弹性构件2160-1,并且第二线圈2120的另一端(或第二端部)可以耦接到第二弹性构件2160-2。
[0745]
另外,例如,感测线圈2180可以电连接到下弹性构件2160的第三弹性构件2160-3
和第四弹性构件2160-4。
[0746]
例如,通过焊接或导电构件,感测线圈2180的一端可以耦接到第三弹性构件2160-3的第二内侧框架2161,并且感测线圈2180的另一端可以耦接到第四弹性构件2160-4的第二内侧框架2161。可以通过第三弹性构件2160-3和第四弹性构件2160-4的第三端子2164-3和第四端子2164-4向感测线圈2180提供驱动信号或电力。
[0747]
用于与骨架2110的第二耦接部分2117耦接的孔2161a可以设置在第二内侧框架2161中,并且用于与外壳2140的第二耦接部分2147耦接的孔2162a可以设置在第二外侧框架2162中。
[0748]
在另一实施例中,下弹性构件可以实现为一体形成的一个弹性单元,并且根据另一实施例,线圈2120可以电连接到多个上弹性构件中的两个上弹性构件。
[0749]
上弹性构件2150的第一框架连接部分2153和下弹性构件2160的第二框架连接部分2163中的每个框架连接部分被形成为至少一次或多次弯曲或成曲线(或曲线),以形成具有预定形状的图案。通过第一框架连接部分2153和第二框架连接部分2163的位置变化和微变形,可以柔性地(或弹性地)支撑骨架2110在第一方向上的上升和/或下降移动。
[0750]
上弹性构件2150和下弹性构件2160可以由板簧形成,但其不限于此,而是可以实现为螺旋弹簧等。
[0751]
为了吸收和缓冲骨架2110的振动,镜头驱动设备2100可以还包括设置在上弹性构件2150与骨架2110(或外壳2140)之间的第一阻尼器(未示出)。
[0752]
例如,第一阻尼器(未示出)可以设置在上弹性构件2150的第一框架连接部分2153与骨架2110之间的空间中。
[0753]
另外,例如,镜头驱动设备2100可以还设置有第二阻尼器(未示出),第二阻尼器被设置在下弹性构件2160的第二框架连接部分2163与骨架2110(或外壳2140)之间。
[0754]
另外,例如,在外壳2140的内侧表面与骨架2110的外周表面之间可以设置有阻尼器(未示出)。例如,该阻尼器可以是凝胶形式的硅树脂,但其不限于此。
[0755]
第一弹性构件2160-1可以包括第一端子2164-1,该第一端子连接到第一弹性构件2160-1的第二外侧框架2162的外侧表面,并且在从第一弹性构件2160-1的第二外侧框架2162指向底座2210的方向上弯曲和延伸。
[0756]
另外,第二弹性构件2160-2可以包括第二端子2164-2,该第二端子连接到第二弹性构件2160-2的第二外侧框架2162的外侧表面,并且在从第二弹性构件2160-2的第二外侧框架2162指向底座2210的方向上弯曲和延伸。
[0757]
另外,第三弹性构件2160-3可以包括第三端子2164-3,该第三端子连接到第三弹性构件2160-3的第二外侧框架2162的外侧表面,并且在从第三弹性构件2160-3的第二外侧框架2162指向底座2210的方向上弯曲和延伸。
[0758]
另外,第四弹性构件2160-4可以包括第四端子2164-4,该第四端子连接到第四弹性构件2160-4的第二外侧框架2162的外侧表面,并且在从第四弹性构件2160-4的第二外侧框架2162指向底座2210的方向上弯曲和延伸。
[0759]
例如,第一弹性构件2160-1的第一端子2164-1可以从第一弹性构件2160-1的第二外侧框架2162朝向底座2210的第一外侧表面2028a延伸。
[0760]
另外,例如,第二弹性构件2160-2的第二端子2164-2可以从第二弹性构件2160-2
的第二外侧框架2162朝向底座2210的第一外侧表面2028a延伸。
[0761]
另外,例如,第三弹性构件2160-3的第三端子2164-3可以从第三弹性构件2160-3的第二外侧框架2162朝向底座2210的第二外侧表面2028b延伸。
[0762]
另外,例如,第四弹性构件2160-4的第四端子2164-4可以从第四弹性构件2160-4的第二外侧框架2162朝向底座2210的第二外侧表面2028b延伸。底座2210的第二外侧表面2028b可以被定位成与底座2210的第一外侧表面2028a相对。
[0763]
例如,第一弹性构件2160-1至第四弹性构件2160-4的第一端子2164-1至第四端子2164-4可以设置成彼此间隔开。
[0764]
例如,第一弹性构件2160-1和第二弹性构件2160-2的第一端子2164-1和第二端子2164-2可以设置、安放或插入被设置在底座2210的第一外侧表面2028a上的第一凹进部2052a和第二凹进部2052b中。另外,第三弹性构件2160-3和第四弹性构件2160-4的第三端子2164-3和第四端子2164-4可以设置、安放或插入被设置在底座2210的第二外侧表面2028b上的第三凹进部2052c和第四凹进部2052d中。这里,凹进部可以表述成被替代为“凹槽”。
[0765]
第一弹性构件2160-1至第四弹性构件2160-4的第一端子2164-1至第四端子2164-4可以从底座2210露出,并且第一端子2164-1至第四端子2164-4可以彼此电气隔离。
[0766]
例如,设置在底座2210的凹进部2052a至2052d中的端子2164-1至2164-4的内侧表面可以与凹进部2052a至2052d的一个表面(例如,底表面)接触,并且端子2164-1和2164-4的外侧表面可以从底座2210的外侧表面(例如,2028a和2028b)露出。端子2164-1至2164-4的外侧表面可以是端子2164-1至2164-4的内侧表面的相对表面。
[0767]
例如,第一端子2164-1至第四端子2164-4中的每个端子的下端可以从底座2210的下表面露出,但其不限于此,在另一实施例中,第一端子2164-1至第四端子2164-4中的每个端子的下端可以不从底座2210的下表面露出。
[0768]
凹进部2052a至2052d的深度可以大于端子2164-1至2164-4的厚度,并且被设置在凹进部2052a至2052d中的端子2164-1至2164-4的外侧表面可以不从凹进部2252a至2052d突出。
[0769]
如果结合到第一端子2164-1至第四端子2164-4的焊料从底座2210的外侧表面突出,则结合到第一端子2164-1至第四端子2164-4的焊料与盖构件2300之间可能发生接触或碰撞,这可能导致电气短路或断开。在实施例中,可以充分确保凹进部2052a至2052d的深度,使得结合到端子2164-1至2164-4的焊料不会从底座2210的外侧表面(例如2028a、2028b)突出,因此,本实施例可以防止上述电气短路或断开。
[0770]
在另一实施例中,端子2164-1至2164-4的外侧表面可以突出到凹进部2052a至2052d之外。
[0771]
例如,第一端子2164-1至第四端子2164-4可以通过导电粘合手段(例如,焊接)电连接到外部布线或外部设备。
[0772]
例如,第一端子2164-1和第二端子2164-2可以从外部接收电力或驱动信号,以将该电力或驱动信号提供给线圈2120,并且第一弹性构件2160-1和第二弹性构件2160-2的第一端子2164-1和第二端子2164-2可以电连接到线圈2120。
[0773]
在图28中,第一端子2164-1与第一弹性构件2160-1一体地形成,第二端子2164-2
与第二弹性构件2160-2一体地形成,第三端子2164-3与第三弹性构件2160-3一体地形成,第四端子2164-4与第四弹性构件2160-4一体地形成,但其不限于此。
[0774]
在另一实施例中,第一端子至第四端子中的至少一个端子可以以与第一弹性构件至第四弹性构件中的至少一个弹性构件分离的构造设置在底座2210的外侧表面(例如,2028a和2028b)上,并且对应的弹性构件和端子可以通过导电粘合剂(例如,焊料)彼此耦接或连接。
[0775]
例如,第一端子至第四端子中的每个端子可以与第一弹性构件至第四弹性构件中的每个弹性构件分离地配置,并且第一端子至第四端子中的每个端子可以通过导电粘合剂(例如,焊料)连接到第一弹性构件至第四弹性构件中的对应一个弹性构件。
[0776]
底座2210被设置在骨架2110(或外壳2140)下方。例如,底座2210可以设置在下弹性构件2160下方。
[0777]
例如,底座2210可以耦接到外壳2140,并且可以与盖构件2300一起形成用于骨架2110和外壳2140的容纳空间。
[0778]
底座2210可以具有骨架2110的开口2021和/或对应于外壳2140开口的开口2021,并且该底座可以具有与盖构件2300匹配或对应的形状,例如矩形形状。例如,底座2210的开口2021可以是在光轴方向上贯穿底座2210的通孔的形式。
[0779]
相机模块2200的滤光片2610安装于其内的安放部(未示出)可以形成在底座2210的下表面上。
[0780]
底座2210可以包括用于设置、安放或容纳位置传感器2170的安放凹槽2215。例如,安放凹槽2215可以是从底座2210的上表面凹进的形状。
[0781]
底座2210可以包括在光轴方向上与外壳2140的侧部2141-1至2141-4对应或相对的侧部、以及在光轴方向上与外壳2140的拐角部2142-1至2142-4对应或相对的拐角部。
[0782]
例如,安放凹槽2215可以设置在底座2210的任一个拐角部中。例如,安放凹槽可以形成在安放凹槽2215的底座2210的任何一个拐角与底座2210的开口2021之间。
[0783]
例如,第一凹进部2052a和第二凹进部2052b可以形成在底座2210的第一侧部的外侧表面上,第三凹进部2052c和第四凹进部2052d可以形成在底座2210的第二侧部的外侧表面上。底座2210的第二侧部可以位于底座2210的第一侧部的相反侧。
[0784]
当盖构件2300被粘性固定时,底座2210可以包括在底座2210的外侧表面的下端处的台阶2211,其中向该台阶施加粘合剂。此时,台阶2211可以引导被耦接到上侧的盖构件2300,并且可以面对盖构件2300的侧板2302的下端。可以在盖构件2300的侧板2302的下端与底座2210的台阶2211之间设置或施加粘合构件和/或密封构件。
[0785]
另外,底座2210的上表面2210a可以设置有凹槽2247,突起状外壳2140的第二耦接部分2147被安放、插入或耦接在该凹槽2247中。凹槽2247可以在光轴方向上对应于或面对外壳2140的第二耦接部分2147。
[0786]
至少一个突起或突出部分2145可以形成在外壳2140的下部或下表面上,并且外壳2140的突起或对应于突出部分2145的凹槽2212可以设置在底座2210的侧部中。例如,外壳2140的突起或突出部分2145可以耦接到底座2210的凹槽2212。
[0787]
端子部分2190可以设置在底座2210上并且可以电连接到位置传感器2170。端子部分2190可以包括多个端子p1至p4。所述多个端子p1至p4可以彼此间隔开。
[0788]
底座2210可以由注模材料形成。
[0789]
例如,端子部分2190的第一端子p1至第四端子p4中的每个端子的至少一部分可以通过插入注射成型工艺定位在底座2210内部。在这个意义上,第一端子p1至第四端子p4中的每个端子可以被称为“插入端子”。
[0790]
例如,端子部分2190的第一端子p1至第四端子p4可以设置在底座2210内部。例如,为了与位置传感器2170电连接,第一端子p1至第四端子p4中的每个端子的至少一部分(或一端)b1至b4可以从底座2210的安放凹槽2215露出。
[0791]
另外,例如,为了通过焊料或导电粘合剂与外部布线或外部设备电连接,第一端子p1至第四端子p4中的每个端子的至少另一部分(或另一端)可以朝向底座2210的外侧表面(例如,28a)露出。
[0792]
例如,第三凹进部2052c可以形成在底座2210的第一外侧表面2028a上,并且第一端子p1至第四端子p4中的每个端子的至少另一部分(或另一端)可以设置在底座2210的第三凹进部2052c内部。例如,第一端子p1至第四端子p4中的每个端子的至少另一部分(或另一端)可以不从底座2210的第三凹进部2052c突出,结果,如在第一凹进部2052a和第二凹进部2052b中所述的,可以防止电气短路或断开。
[0793]
第一端子p1至第四端子p4中的每个端子可以包括电连接到位置传感器2170的第一部b1至b4、露出于底座2210的第一外侧表面2028a的第二部q1至q4、以及连接第一部b1至b4和第二部q1至q4的第三部r1至r4。
[0794]
第一端子p1至第四端子p4的至少一个第三部r1至r4可以包括弯曲或曲线部。例如,第三部r1至r4可以包括至少弯曲一次的部分。在另一实施例中,第三部r1至r4可以具有直线形状而不包括弯曲部。
[0795]
位置传感器2170设置在感测线圈2180下方。
[0796]
位置传感器2170可以设置在底座2210上。
[0797]
例如,位置传感器2170可以设置在底座2210的安放凹槽2215内部。位置传感器2170可以设置在端子部分2190的端子p1至p4的通过安放凹槽2215露出的第二部b1至b4上。
[0798]
例如,位置传感器2170可以通过焊接或导电粘合剂耦接到端子部分2190的端子p1至p4的通过安放凹槽2215露出的第二部b1至b4。
[0799]
另外,例如,位置传感器2170可以电连接到端子部分2190的端子p1至p4的第二部b1至b4。
[0800]
位置传感器2170可以是“af位置传感器”。位置传感器2170可以在光轴方向上与线圈2120的一部分重叠。在另一实施例中,位置传感器2170可以不在光轴方向上与线圈2120的一部分重叠。
[0801]
驱动信号2120可以被提供给线圈2120,并且af移动部分(例如,骨架2110和线圈2120)可以通过由于向其提供驱动信号的线圈2120与磁体2130之间的相互作用引起的电磁力而在光轴方向上移动。向其提供驱动信号的线圈2120可以产生磁场。
[0802]
位置传感器2170可以检测在光轴方向上移动时的线圈2120的磁场强度,并且可以根据检测结果输出输出信号。
[0803]
例如,由位置传感器2170检测到的线圈2120的磁场的强度或磁力可以根据骨架2110在光轴方向上的位移而改变,并且位置传感器2170可以输出与检测到的磁场强度成比
例的输出信号。相机模块或光学装置的控制单元2410和2780可以通过使用位置传感器2170的输出信号来检测骨架2110在光轴方向上的位移。
[0804]
位置传感器2170可以独自实现为霍尔传感器或以包括霍尔传感器的驱动器ic(集成电路)的形式来实现。
[0805]
另外,由于位置传感器2170被设置在底座2210上,因此与位置传感器2170被放置在ois移动部分(例如,外壳)中的情况相比,由于位置传感器2170与线圈2120之间的分离距离可以增加,因此,位置传感器2170可以实现为高灵敏度霍尔传感器或隧道磁阻(tmr)传感器。
[0806]
在仅用霍尔传感器实现的实施例或用tmr传感器实现的实施例中,位置传感器2170可以包括两个输入端子和两个输出端子。此时,位置传感器2170检测线圈2120中产生的磁场,并且可以通过两个输出端子输出作为模拟信号的输出电压。
[0807]
位置传感器2170的所述两个输入端子可以电连接到端子部分2190的第一端子和第二端子(例如,p1和p2),并且可以通过这些端子p1和p2向位置传感器2170提供驱动信号。
[0808]
另外,位置传感器2170的所述两个输出端子可以电连接到端子部分2190的第三端子和第四端子(例如,p3和p4),并且可以通过这些端子(例如,p3和p4)输出位置传感器2170的输出信号。
[0809]
例如,在以包括霍尔传感器的驱动器ic(集成电路)的形式实现的实施例中,位置传感器2170可以包括:第一端子和第二端子,该第一端子和第二端子用于接收电力;第三端子和第四端子,该端子用于传输和接收用于数据通信的时钟信号以及数据信号;以及第五端子和第六端子,该第五端子和第六端子用于向线圈2120提供直接驱动信号。此时,位置传感器2170的第一端子至第四端子中的每个端子可以电连接到端子部分2190的第一端子至第四端子中的任一个端子,并且位置传感器2170的第五端子和第六端子可以电连接到线圈2120。例如,位置传感器2170的第五端子和第六端子可以电连接到第一弹性构件2160-1和第二弹性构件2160-2;第一弹性构件和第二弹性构件可以电连接到线圈;并且在这种情况下,可以省略第一弹性构件2160-1和第二弹性构件2160-2的第一端子2164-1和第二端子2164-2。
[0810]
接下来,将描述盖构件2300。
[0811]
盖构件2300可以在与底座2210一起形成的容纳空间中容纳af移动部分、外壳2140、磁体2130、上弹性构件2150、下弹性构件2160、位置传感器2170、端子部分2190、底座2210。
[0812]
盖构件2300具有敞口的下部,并且可以具有包括上板2310和侧板2302的盒形状,并且盖构件2300的下部可以耦接到底座2210的上部。盖构件2300的上板可以是多边形,例如四边形或八边形。
[0813]
盖构件2300可以在上板2301中具有开口,以将耦接到骨架2110的镜头(未示出)暴露于外部光。盖构件2300的材料可以是诸如sus的非磁性材料,以防止粘附到磁体2130。盖构件2300可以由金属板形成,但其不限于此,而是可以由塑料形成。
[0814]
图33a示出了线圈2120、磁体单元(2130-1至2130-4)、感测线圈2180以及位置传感器2170的设置,图33b示出了图33a的仰视图。
[0815]
参考图33a和图33b,线圈2120可以包括设置在骨架2110的侧部2110b1至2110b4上
的第一部2012a、以及设置在骨架2110的拐角部2110c1至2110c4上的第二部2012b。
[0816]
例如,第一部2012a的水平长度l1可以大于第二部2012b的水平长度l2。
[0817]
感测线圈2180可以设置在线圈2120下方,位置传感器2170可以设置在感测线圈2180下方。
[0818]
例如,感测线圈2180和位置传感器2170可以与线圈2120的第二部2012b中的任一个在光轴方向上重叠。
[0819]
感测线圈2180可以设置成更邻近外壳2140的第二拐角部2142-2或第四拐角部2142-4,而不是外壳2140的第一拐角部2142-1和第二拐角部2142-2。这是因为通过增加感测线圈2180与磁体单元2130-1至2130-4之间的分离距离来减小感测线圈2180与磁体单元2130-1至2130-4之间的相互作用的影响,从而使得af驱动不受线圈2120与磁体单元2130-1至2130-4之间的相互作用的影响。
[0820]
另外,位置传感器2170可以设置成更邻近外壳2140的第二拐角部2142-2或第四拐角部2142-4,而不是外壳2140的第一拐角部2142-1和第二拐角部2142-2。这是为了通过允许位置传感器2170受磁体单元2130-1至2130-4的磁场的影响较小来提高位置传感器2170的输出值的可靠性并检测线圈2120的磁场的强度。
[0821]
例如,线圈2120与位置传感器2170之间的最短距离d1可以小于位置传感器2170与相邻磁体单元(例如,2130-1和2130-4)和位置传感器2170之间的最短距离d2(d1《d2)。这是为了减少磁体(例如,2130-1和2130-4)的磁场干扰的影响并提高位置传感器2170对感测线圈2180的磁场的感测灵敏度。在另一实施例中,可以是d1≥d2。
[0822]
参考图31和图33a,感测线圈2180与线圈2120之间的最短距离d3可以小于感测线圈2180与位置传感器2170之间的最短距离d4(d3《d4),但其不限于此。在另一实施例中,为了提高位置传感器2170对感测线圈2180的磁场的灵敏度,可以是d4《d3。在另一实施例中,可以是d3=d4。
[0823]
参考图33b的仰视图,当从上方(或下方)观察时,位置传感器2170可以位于感测线圈2180的区域内。为了提高位置传感器2170的灵敏度,位置传感器2170的感测元件(或感测区域)可以在光轴方向上与感测线圈2180重叠。
[0824]
例如,位置传感器2170在水平方向上的长度k1可以小于感测线圈2180在水平方向上的长度m1(k1<m1)。另外,例如,位置传感器2170在纵向方向上的长度k2可以小于感测线圈2180在纵向方向上的长度m2(k2<m2)。
[0825]
在另一实施例中,位置传感器在水平方向上的长度可以大于或等于感测线圈在水平方向上的长度。另外,在另一实施例中,位置传感器在纵向方向上的长度可以大于或等于感测线圈在纵向方向上的长度。
[0826]
在另一实施例中,当从上方(或从下方)观察时,位置传感器可以包括在光轴方向上不与感测线圈2180重叠的部分。例如,当从上方(或从下方)观察时,位置传感器的一部分可以设置成突出到感测线圈的区域之外。
[0827]
在另一实施例中,当从上方(或下方)观察时,感测线圈(或/和位置传感器)的至少一部分可以设置在线圈2120的外侧上。例如,全部、一些或大部分感测线圈(或/和位置传感器)可以设置在线圈2120的外侧上。
[0828]
图34示出了骨架2110的位移、被施加于线圈2120的第一驱动信号id以及被施加于
感测线圈2180的第二驱动信号is之间的关系。a1可以是骨架2110的最高位置或宏观位置,a2可以是骨架2110的最低位置或无穷远位置。图34的x轴可以是骨架的位移或骨架的行程。
[0829]
参考图34,第一驱动信号id的大小与为了移动骨架2110的骨架2110的位移(或骨架的行程)之间的关系可以是具有恒定斜率的线性直线。或者,在另一实施例中,二者之间的关系可以是非线性的。
[0830]
例如,随着骨架的位移变化,第一驱动信号id可以是增加或减少的信号。
[0831]
另一方面,即使骨架2110的位移或位置被改变以产生具有预定强度的磁场,第二驱动信号is的大小可以具有恒定值。例如,可以向第二驱动信号is提供具有预定恒定值的信号,而不管骨架2110的位移如何。
[0832]
图35a示出了用于模拟的感测线圈2180和位置传感器2170的设置,图35b示出了根据af移动部分在光轴方向上的移动的图35a的感测线圈2180的位置变化,并且图35c示出了由位置传感器2170根据图35b的感测线圈2180的位置变化而感测到的感测线圈2180的磁场强度的变化。
[0833]
参考图35a至图35c,从上方观察的感测线圈2180的外周表面的形状可以是四边形,但其不限于此。感测线圈2180的外周表面的长度x1可以是3.29[mm],感测线圈2180的外周表面的宽度y1可以是2.05[mm],感测线圈2180的内周表面的长度x2可以是1.93[mm],感测线圈2180的内周表面的宽度y2可以是0.74[mm],并且感测线圈2180在光轴方向上的长度z1为0.54[mm]。另外,被提供给感测线圈2180的驱动信号ia可以是100[ma]。另外,从位置传感器2170的下表面217a到感测线圈2180的下表面2018a的分离距离d1可以是0.43[mm]。
[0834]
在af移动部分的初始位置(例如,其中z=0的位置)处,af移动部分的前行程可以是200[μm],af移动部分的后行程可以是200[μm]。
[0835]
在图35c中,x轴表示感测线圈2180在光轴方向上的位移(或位置),y轴表示由位置传感器2170检测到的感测线圈2180的磁场强度变化。g1表示由位置传感器2170检测到的感测线圈2180的磁场强度在光轴方向上的变化,g2表示由位置传感器2170检测到的感测线圈2180的磁场强度在垂直于光轴方向上的变化。
[0836]
如g1所示,由位置传感器2170根据af移动部分在光轴方向上的位移而感测到的光轴方向的磁场变化可以在-4.6[mt]至-8.2[mt]的范围内,并且g1可以是线性曲线图。
[0837]
位置传感器2170的输出可以与由位置传感器2170检测到的感测线圈2180的磁场强度成比例,并且相机模块2200或终端2200a的控制单元2410和780可以使用位置传感器270的输出,检测af移动部分在光轴方向上的位移。
[0838]
在另一实施例中,两个磁体单元可以设置在外壳2140的彼此面对的两个侧部(例如,2141-1和2141-2)上。此时,位置传感器2170可以设置在底座2210上,以便在光轴方向上与线圈2120的被设置在骨架2110的外侧表面上的部分重叠,该部分对应于外壳2140的未设置有所述两个磁体单元的侧部、以及所述拐角部中的任一个。
[0839]
参考图35a和图35b,位置传感器2170在光轴方向上的中心和感测线圈2180位置传感器2170的中心可以设置成彼此重叠,但其不限于此。在另一实施例中,位置传感器2170的中心被设置成与感测线圈2180的边缘或边缘侧重叠,而不是与感测线圈2180的中心重叠,或者可以设置成与感测线圈2180的一些侧重叠。
[0840]
图36示出了根据另一示例性实施例的线圈2120a、磁体单元2130a-1至2130a-4、感
测线圈2180以及位置传感器2170的设置。
[0841]
参考图36,磁体单元2130a-1至2130a-4可以设置在外壳的拐角部处。设置在外壳的拐角部中的每个磁体单元2130a-1至2130a-4的形状可以是多面体形状,从而容易安放在外壳的拐角部中。
[0842]
例如,磁体单元2130a-1至2130a-4中的每个磁体单元的第一表面的面积可以大于第二表面的面积。磁体单元2130a-1至2130a-4中的每个磁体单元的第一表面2011a可以是面对线圈2120a的任何一个表面(或骨架2110的外侧表面)的表面,并且第二表面2011b可以是与第一表面2011a相对的表面。例如,第二表面2011b在水平方向上的长度可以小于第一表面2011a在水平方向上的长度。
[0843]
例如,第一磁体单元2130a-1至第四磁体单元2130a-4中的每个磁体单元可以包括其中在水平方向上的长度在从第一表面2011a朝向第二表面2011b指向的方向上逐渐减小的部分。
[0844]
线圈2120a可以包括:第一部2012a1,该第一部被设置在骨架2110的与外壳的侧部对应的侧部上;和第二部2012b1,该第二部被设置在骨架2110的与外壳的拐角部对应的拐角部处。
[0845]
位置传感器2170可以设置成与线圈2120a的第一部2012a1中的任一个重叠,这些第一部被设置在骨架2110的与外壳在光轴方向上的任一个侧部相对应的侧部上。线圈2120a与位置传感器2170之间的第一最短距离可以小于位置传感器2170与相邻磁体单元(例如,2130a-1和2130a-4)和位置传感器之间的第二最短距离。在另一实施例中,第一最短距离可以大于或等于第二最短距离。
[0846]
感测线圈2120可以设置成与线圈2120a的第一部2012a1中的被设置在骨架2110的与外壳的任一个侧部相对应的侧部上的任一个第一部在光轴方向上重叠。
[0847]
例如,感测线圈2180可以与线圈2120a的第一部2012a1在光轴方向上重叠,该第一部被设置在骨架2110的与外壳的侧部2141-1相对应的侧部2110b1上。
[0848]
在本实施例中,感测线圈2180被设置成更靠近位置传感器2170而不是线圈2120,由于位置传感器2170上的感测线圈2180的磁场强度大于位置传感器2170上的线圈2120的磁场强度,所以本实施例可以进一步提高位置传感器2170对感测线圈2180的磁场的感测灵敏度。
[0849]
由于客户的要求,镜头驱动设备的尺寸越来越小,在使用感测磁体来检测骨架在光轴方向上的位置的镜头驱动设备中,感测磁体与驱动磁体之间的距离变窄。
[0850]
图37是示出了使用感测磁体的镜头驱动设备中的感测磁体和驱动磁体中的每一个的磁场分布的视图。
[0851]
参考图37,当感测磁体和驱动磁体之间的距离变窄时,由于感测磁体和驱动磁体之间的相互磁场干扰,作为位置传感器的霍尔传感器的输出值的可靠性会下降,af驱动精度可能会降低,vcm设计存在困难。
[0852]
本实施例未单独提供感测磁体,因为被设置在底座2210上的位置传感器2170通过检测线圈2120的磁场的根据af移动部分(例如,骨架2110)在光轴方向上的移动(或位移)的磁力变化来检测骨架2110的位置(或位移),所以可以防止位置传感器的输出值的可靠性由于感测磁体与磁体单元之间的磁场干扰而劣化。
[0853]
图38是根据另一示例性实施例的镜头驱动设备2100-1的分解图,图39示出了图38的线圈2120、磁体单元2130-1至2130-4以及位置传感器2170的设置,图40是沿图24的方向ab截取的图38的镜头驱动设备2100-1的剖视图。
[0854]
在图38中,与图23中相同的附图标记指示相同的组件,并且将省略或简化相同组件的描述。
[0855]
参考图38至图40,镜头驱动设备2100-1可以具有从图23的镜头驱动设备中省略了感测线圈2180的结构。
[0856]
位置传感器2170可以设置在线圈2120下方。例如,位置传感器2170可以在光轴方向上与线圈2120的第二部分2012b中的任何一个第二部分重叠。对于图39的d1和d2,可以应用或比照应用对于图33a的描述。
[0857]
被提供给线圈2120的驱动信号可以包括dc信号和ac信号。此时,被提供给线圈2120的驱动信号中包含的ac信号可以通过与磁体单元2130-1至2130-4的相互作用产生电磁力。例如,ac信号可以是脉宽调制(pwm)信号。
[0858]
另外,例如,线圈2120可以通过被包括在提供给线圈2120的驱动信号中的dc信号为位置传感器2170产生磁场。
[0859]
图41示出了被提供给图38的线圈2120的驱动信号的示例。
[0860]
参考图41,被提供给线圈2120的驱动信号v3可以包括具有恒定幅度a的pwm信号v1和dc信号v2。
[0861]
磁体单元2130-1至2130-4与线圈2120之间的电磁力可以由pwm信号v1控制。也就是说,通过控制pwm信号的占空比,可以控制磁体单元2130-1至2130-4与线圈2120之间的电磁力。
[0862]
由dc信号v2在线圈2120中产生的磁场强度可以是恒定的,而与骨架2110的位移无关。然而,随着骨架2110移动,位置传感器2170检测到的由dc信号v2引起的线圈2120的磁场强度或磁力可以改变,并且位置传感器2170可以输出与检测到的磁场强度成比例的输出信号。
[0863]
也就是说,位置传感器2170可以检测在光轴方向上移动的线圈2120的磁场强度,并且可以根据检测结果输出输出信号。
[0864]
相机模块或光学装置的控制单元2410和780可以通过使用位置传感器2170的输出信号来检测骨架2110在光轴方向上的位移。
[0865]
图42示出了根据另一实施例的磁体单元、线圈和位置传感器2170的设置。图42可以是图36的变型实施例。在图42的实施例中,从图36省略了感测线圈2180,并且可以应用或比照应用对图36的描述。
[0866]
根据上述实施例的镜头驱动设备2100和2100-1可以在各种领域中实现,例如,作为相机模块或光学装置,或者可以在相机模块或光学装置中使用。
[0867]
例如,根据本实施例的镜头驱动设备2100和2100-1可以被包括在光学装置中,该光学装置用于利用光的反射、折射、吸收、干涉和衍射等特性形成空间中物体的图像,或者提高眼睛的视力,或通过镜头记录图像并再现图像,或者用于光学测量、图像传播或传输等。例如,根据本实施例的光学装置可以包括智能手机和配备有相机的便携式终端。
[0868]
图43是根据本发明的第二实施例的相机模块2200的分解透视图。
[0869]
参考图43,相机模块可以包括镜头模块2400、镜头驱动设备2100、粘合构件2612、滤光片2610、电路板2800、图像传感器2810、控制单元2410以及连接器840。该相机模块可以包括镜头驱动设备2100-1来代替镜头驱动设备2100。
[0870]
镜头模块2400可以包括镜头或镜筒,并且可以安装或耦接到镜头驱动设备2100的骨架2110。
[0871]
例如,镜头模块2400可以包括一个或多个镜头和容纳该一个或多个镜头的镜筒。然而,该镜头模块的一种配置不限于镜筒,而是可以使用能够支撑一个或多个镜头的任何保持座结构。镜头模块可以耦接到镜头驱动设备2100并且与镜头驱动设备2100和2100-1一起移动。
[0872]
例如,作为示例,镜头模块2400可以螺纹耦接到镜头驱动设备2100。作为示例,镜头模块2400可以通过粘合剂(未示出)耦接到镜头驱动设备2100。同时,穿过镜头模块2400的光穿过滤光片2610并且可以照射到图像传感器2810。
[0873]
粘合构件2612可以将镜头驱动设备2100的底座2210耦接或附接到电路板2800。例如,粘合构件2612可以是环氧树脂、热固性粘合剂、紫外线可固化粘合剂等。
[0874]
滤光片2610可以用于阻挡穿过镜筒2400的光中的特定频带的光入射到图像传感器2810上。滤光片2610可以是红外截止滤光片,但其不限于此。此时,滤光片2610可以设置成平行于x-y平面。
[0875]
此时,红外截止滤光片可以由薄膜材料或玻璃材料形成。作为示例,红外滤光片可以通过在平坦光学滤光片(例如用于保护成像表面的盖玻片)上涂覆红外阻挡涂层材料来形成。
[0876]
滤光片2610可以设置在镜头驱动设备2100的底座2210下方。
[0877]
例如,镜头驱动设备2100的底座2210可以具有用于将滤光片2610安放在其下表面上的安放部。在另一实施例中,可以提供用于安装滤光片2610的单独的传感器底座。
[0878]
电路板2800可以设置在镜头驱动设备2100的下部处,并且图像传感器2810可以安装在电路板2800上。图像传感器2810可以接收被包含在穿过镜头驱动设备2100入射的光中的图像,并将接收到的图像转换成电信号。
[0879]
图像传感器2810可以被定位成使得镜头模块2400与光轴重合。这样,图像传感器可以获取穿过镜头模块2400的光。图像传感器2810可以将照射的光作为图像输出。
[0880]
电路板2800可以电连接到镜头驱动设备2100。
[0881]
例如,电路板2800可以电连接到镜头驱动设备2100的线圈2120、感测线圈2180和位置传感器2170。
[0882]
例如,电路板2800可以设置有镜头驱动设备2100的下弹性构件2160的第一端子2164-1至第四端子2164-4、以及电连接到端子部分2190的端子p1至p4的端子2811。
[0883]
例如,可以通过电路板2800向位置传感器2170提供驱动信号,并且可以将位置传感器2170的输出信号传输到电路板2800。例如,位置传感器2170的输出信号可以被控制单元2410接收,但其不限于此,可以通过终端2811传输到终端2200a的控制单元2780。
[0884]
另外,例如,可以通过电路板2800向线圈2120提供驱动信号,并且可以向感测线圈2180提供驱动信号。
[0885]
电路板2800被示出为包括八个端子,但其不限于此,在另一实施例中,电路板2800
可以包括用于af驱动的多个端子,例如两个或更多个端子。
[0886]
滤光片2610和图像传感器2810可以被设置成在第一方向上彼此面对。
[0887]
连接器2840电连接到电路板2800并且可以设置有用于电连接到外部设备的端口。
[0888]
控制单元2410可以控制镜头驱动设备2100的af驱动,但不限于此,镜头驱动设备的af驱动可以由终端2200a的控制单元2780控制。
[0889]
另外,相机模块2200可以还包括运动传感器,以输出由于相机模块2200的移动而引起的旋转角度速度信息。
[0890]
图44是根据本发明的第二实施例的便携式终端2200a的透视图,图45是图44中所示的便携式终端2200a的框图。
[0891]
参考图44和图45,便携式终端2200a(下文称为“终端”)可以包括本体2850、无线通信单元2710、a/v输入单元2720、感测单元2740、输入/输出单元2750、存储器单元2760、接口单元、控制单元2780以及电源2790。
[0892]
图44中所示的本体2850为直板形状,但其不限于此,可以是诸如滑盖式、折叠式、摆动式、旋转式等各种结构,其中两个或更多个子主体耦接而可相对于彼此移动。
[0893]
本体2850可以包括形成外观的壳(壳体、外壳、盖等)。例如,本体2850可以分为前壳2851和后壳2852。终端的各种电子组件可以内置在前壳2851和后壳2852之间形成的空间中。
[0894]
无线通信单元2710可以由一个或多个模块构成,使得能够在终端2200a与无线通信系统之间或者在终端2200a与终端2200a所在的网络之间进行无线通信。例如,无线通信单元2710可以由广播接收模块2711、移动通信模块2712、无线互联网模块2713、短距通信模块2714以及定位信息模块2715构成。
[0895]
音频/视频(a/v)输入单元2720用于输入音频信号或视频信号,并且可以包括相机2721、麦克风2722等。
[0896]
相机2721可以包括根据实施例的相机模块2200。
[0897]
感测单元2740可以通过检测终端2200a的当前状态,例如终端2200a的打开/关闭状态、终端2200a的位置、是否存在用户接触、终端2200a的定向、终端2200a的加速/减速等,产生用于控制终端2200a的操作的感测信号。例如,当终端2200a为滑盖手机的形式时,可以感测滑盖手机是打开还是关闭的。另外,感测单元负责感测与电源单元2790是否被供电、接口单元2770是否耦接到外部设备等相关的功能。
[0898]
输入/输出单元2750用于产生与视觉、听觉或触摸相关的输入或输出。输入/输出单元2750可以产生用于终端2200a的操作控制的输入数据,另外,可以显示由终端2200a处理的信息。
[0899]
输入/输出单元2750可以包括小键盘单元2730、显示模块2751、声音输出模块2752和触摸屏面板2753。小键盘单元2730可以响应于小键盘输入而产生输入数据。
[0900]
显示模块2751可以包括其颜色根据电信号而改变的多个像素。例如,显示模块2751可以包括液晶显示器、薄膜晶体管-液晶显示器、有机发光二极管、柔性显示器和3d显示器中的至少一种。
[0901]
声音输出模块2752可以在呼叫信号接收、呼叫模式、记录模式、语音识别模式或广播接收模式等中输出从无线通信单元2710接收到的音频数据,或者可以输出存储在存储器
单元2760中的音频数据。
[0902]
触摸屏面板2753可以将由于用户在触摸屏的特定区域上的触摸而产生的电容变化转换为电输入信号。
[0903]
存储器单元2760可以存储用于处理和控制控制单元2780的程序,并且可以临时存储输入/输出数据(例如,电话簿、消息、音频、静止图像、照片、视频等)。例如,存储器单元2760可以存储由相机2721拍摄的图像,例如照片或视频。
[0904]
接口单元2770用作用于连接到外部设备的通道,外部设备被连接到终端2200a。接口单元2770从外部设备接收数据,接收电力并将其传输到终端2200a内部的每个组件,或者将终端2200a内部的数据传输到外部设备。例如,接口单元2770可以包括有线/无线头戴式耳机端口、外部充电器端口、有线/无线数据端口、存储器卡端口、用于连接具有识别模块的设备的端口,以及音频输入/输出(i/o)端口、视频输入/输出(i/o)端口、耳机端口等。
[0905]
控制单元2780可以控制终端2200a的整体操作。例如,控制单元2780可以对语音呼叫、数据通信、视频呼叫等执行相关的控制和处理。
[0906]
控制单元2780可以包括用于播放多媒体的多媒体模块2781。多媒体模块2781可以在控制单元2780中实现或者可以与控制单元2780分开地实现。
[0907]
控制单元2780可以执行能够将在触摸屏上执行的手写输入或绘图输入分别识别为字符和图像的模式识别处理。
[0908]
电源单元2790可以在控制单元2780的控制下接收外部电力或内部电力,以供应每个组件操作所需的电力。
[0909]
根据本发明第二实施例的镜头驱动设备可以包括本发明第一实施例的感测结构。更详细地,根据本发明第二实施例的镜头驱动设备可以包括根据本发明第一实施例的感测线圈180和位置传感器170。根据本发明第二实施例的镜头驱动设备可以包括根据本发明的第三实施例的基板3600和下弹性部分材料3520。
[0910]
下面将参考附图描述根据本发明的第三实施例的镜头驱动设备的配置。
[0911]
图46是根据本发明的第三实施例的镜头驱动设备的透视图,图47是沿图46的线a-a截取的剖视图,图48是沿图46的线b-b截取的剖视图,图49是沿图46的线c-c截取的剖视图,图50是根据本发明的第三实施例的镜头驱动设备的仰视图,图51是其中在图46中移除了盖的状态的透视图,图52是根据本发明的第三实施例的镜头驱动设备的分解透视图,图53是从与图52不同的方向观察的根据本发明的第三实施例的镜头驱动设备的分解透视图,图54是示出了根据本发明的第三实施例的动子和定子的分解透视图,图55是示出了根据本发明的第三实施例的底座、弹性构件以及基板的分解透视图,图56是从与图55不同的方向观察的、根据本发明的第三实施例的配置的一部分的分解透视图,图57a是示出了根据本发明的第三实施例的底座与基板之间的耦接状态的透视图,图57b是示出根据变型例的底座与基板之间的耦接状态的透视图,图58是示出了下弹性构件另外耦接到图57a的状态的透视图,并且图59是根据本发明的第三实施例的镜头驱动设备的一部分的截面透视图。
[0912]
镜头驱动设备3010可以是音圈马达(vcm)。镜头驱动设备3010可以是镜头驱动马达。镜头驱动设备3010可以是镜头驱动马达。镜头驱动设备3010可以是镜头驱动致动器。在本实施例中,镜头驱动设备3010可以包括claf致动器或claf模块。例如,其中镜头、图像传感器3060和印刷电路板3050被组装到镜头驱动设备3010的状态可以被理解为相机模块。
[0913]
镜头驱动设备3010可以包括盖3100。盖3100可以覆盖外壳3310。盖3100可以耦接到底座3400。可以在盖3100与底座3400之间形成内部空间。盖3100可以在其内部容纳外壳3310。盖3100可以在其内部容纳骨架3210。盖3100可以形成相机模块的外观。盖3100可以具有包括敞口下表面的六面体形状。盖3100可以是非磁性材料。盖3100可以由金属材料形成。盖3100可以由金属板形成。盖3100可以连接到印刷电路板的接地部。这样,盖3100可以被接地。盖3100可以阻挡电磁干扰(emi)。此时,盖3100可以被称为“屏蔽罩”或“emi屏蔽罩”。
[0914]
盖3100可以包括上板3110。盖3100可以包括侧板3120。侧板3120可以从上板3110延伸。盖3100可以包括上板3110和从上板3110的外周边或边缘向下延伸的侧板3120。盖3100的侧板3120的下端可以设置在底座3400的台阶3450上。盖3100的侧板3120的内表面可以用粘合剂固定到底座3400。
[0915]
盖3100可以包括多个侧板。盖3100可以包括多个侧板和由该多个侧板形成的多个拐角。盖3100可以包括四个侧板和形成在该四个侧板之间的四个拐角。盖3100可以包括第一侧板、与第一侧板相对设置的第二侧板、以及在第一侧板和第二侧板之间彼此相对设置的第三侧板和第四侧板。盖3100可以包括第一拐角至第四拐角。盖3100可以包括第一拐角、与第一拐角相对设置的第二拐角,以及彼此相对设置的第三拐角和第四拐角。
[0916]
盖3100可以包括内轭(yoke)3130。内轭3130可以从上板3110的内周向下延伸。内轭3130可以设置在侧板3120中。内轭3130的至少一部分可以设置在骨架3210的凹槽3213中。内轭3130可以形成为防止骨架3210旋转。内轭3130可以包括多个内轭。内轭3130可以包括四个内轭。该四个内轭可以分别形成在盖3100的四个拐角处。
[0917]
镜头驱动设备3010可以包括动子3200。动子3200可以耦接到镜头。动子3200可以通过弹性部分材料3500连接到定子3300。动子3200可以通过与定子3300的相互作用而移动。此时,动子3200可以与镜头一体地移动。同时,动子3200可以在af驱动期间移动。此时,动子3200可以被称为“af动子”。
[0918]
镜头驱动设备3010可以包括骨架3210。骨架3210可以设置在外壳3310内部。骨架3210能够可移动地耦接到外壳3310。骨架3210可以在光轴方向上相对于外壳3310移动。骨架3210可以设置在盖3100内部。骨架3210可以设置在底座3400上。
[0919]
骨架3210可以包括孔3211。孔3211可以是中空孔。镜头可以耦接到孔3211。在骨架3210的孔3211的内周表面上可以形成有螺纹。或者,骨架3210的孔3211的内周表面可以形成为曲线表面而无螺纹。骨架3210可以包括耦接到上弹性部分材料3510的第一突起。骨架3210的第一突起可以插入并耦接到上弹性部分材料3510的对应孔中。骨架3210可以包括耦接到下弹性部分材料3520的第二突起。骨架3210的第二突起可以插入并耦接到下弹性部分材料3520的对应孔中。
[0920]
骨架3210可以包括肋3212。肋3212可以从骨架3210的侧表面突出。肋3212可以固定第一线圈3220。肋3212可以包括从骨架3210的上部突出的上肋和从骨架3210的下部突出的下肋。第一线圈3220可以缠绕并固定在上肋和下肋之间。
[0921]
骨架3210可以包括凹槽3213。凹槽3213可以是容纳凹槽的内轭。盖3100的内轭3130的至少一部分可以设置在凹槽3213中。凹槽3213可以通过凹入骨架3210的上表面而形成。凹槽3213的宽度可以略大于内轭3130的宽度。通过上述设置结构,当骨架3210转动时,骨架3210被内轭3130卡住,并且可以防止骨架3210被转动。
[0922]
骨架3210可以包括上止挡件3214。上止挡件3214可以从骨架3210的上表面突出。上止挡件3214的上表面可以形成骨架3210的上端。因此,当骨架3210尽可能向上移动时,上止挡件3214的上表面可以与盖3100的上板3110接触。骨架3210的上止挡件3214可以与盖3100的上板3110在光轴方向上重叠。
[0923]
骨架3210可以包括下止挡件3215。下止挡件3215可以形成为从骨架3210的下表面突出。下止挡件3215的下表面可以形成骨架3210的下端。由此,当骨架3210尽可能向下移动时,下止挡件3215的下表面可以接触底座3400。骨架3210的下止挡件3215可以在光轴方向上与底座3400重叠。
[0924]
骨架3210可以通过粘合剂耦接到弹性部分材料3500和第一线圈3220中的任一个或多个。此时,粘合剂可以是通过热、激光和紫外(uv)光中的一种或多种固化的环氧树脂。
[0925]
镜头驱动设备3010可以包括第一线圈3220。第一线圈3220可以是
‘
af驱动线圈’。第一线圈3220可以设置在骨架3210上。第一线圈3220可以设置成与骨架3210接触。第一线圈3220可以设置在骨架3210与外壳3310之间。第一线圈3220可以设置在骨架3210的外周上。第一线圈3220可以直接缠绕在骨架3210上。第一线圈3220可以面对磁体3320。第一线圈3220可以与磁体3320进行电磁相互作用。当向第一线圈3220供应电流以在第一线圈3220周围形成电磁场时,第一线圈3220通过第一线圈3220与磁体3320之间的电磁相互作用形成。第一线圈可以相对于磁体3320移动。
[0926]
镜头驱动设备3010可以包括定子3300。定子3300能够可移动地支撑动子3200。定子3300可以通过与动子3200的相互作用来移动动子3200。定子3300可以包括外壳3310和磁体3320。然而,底座3400和盖3100也可以被理解成定子3300。
[0927]
镜头驱动设备3010可以包括外壳3310。外壳3310可以设置在骨架3210的外侧上。外壳3310可以容纳骨架3210的至少一部分。外壳3310可以设置在盖3100内部。外壳3310可以设置在盖3100与骨架3210之间。外壳3310可以由与盖3100的材料不同的材料形成。外壳3310可以由绝缘材料形成。外壳3310可以由注模材料形成。磁体3320可以设置在外壳3310中。外壳3310和磁体3320可以通过粘合剂耦接。上弹性部分材料3510可以耦接到外壳3310的上部。下弹性部分材料3520可以耦接到外壳3310的下部。外壳3310可以通过热熔合和/或粘合剂耦接到弹性部分材料3500。
[0928]
外壳3310可以包括:第一侧部和第二侧部,该第一侧部和第二侧部被设置在彼此相反侧;第三侧部和第四侧部,该第三侧部和第四侧部被设置在彼此相反侧;第一拐角部,该第一拐角部连接第一侧部和第三侧部;第二拐角部,该第二拐角部连接第一侧部和第四侧部;第三拐角部,该第三拐角部连接第二侧部和第四侧部;以及第四拐角部,该第四拐角部连接第二侧部和第三侧部。
[0929]
外壳3310可以包括第一孔3311。第一孔3311可以是中空孔。第一孔3311可以通过垂直贯穿外壳3310的中央部而形成。骨架3210可以设置在外壳3310的第一孔3311中。
[0930]
外壳3310可以包括第二孔3312。第二孔3312可以是
‘
磁体容纳孔’。磁体3320可以设置在第二孔3312中。第二孔3312可以通过在垂直于光轴的方向上穿透外壳3310的侧部而形成。作为变型实施例,第二孔3312可以形成为凹槽。
[0931]
外壳3310可以包括突起3313。突起3313可以形成为从外壳3310的上表面突出。突起3313可以耦接到上弹性部分材料3500。突起3313可以插入并耦接到弹性部分材料3500的
对应孔。
[0932]
外壳3310可以通过粘合剂耦接到盖3100、底座3400、弹性部分材料3500以及磁体3320中的任一个或多个。此时,粘合剂可以是通过热、激光和紫外(uv)光中的一种或多种固化的环氧树脂。
[0933]
镜头驱动设备3010可以包括磁体3320。磁体3320可以是
‘
驱动磁体’。磁体3320可以设置在外壳3310中。磁体3320可以设置在第一线圈3220与盖3100的侧板3120之间。磁体3320可以设置在骨架3210与外壳3310之间。磁体3320可以面对第一线圈3220。磁体3320可以与第一线圈3220进行电磁相互作用。磁体3320可以用于af驱动。磁体3320可以设置在外壳3310的侧部上。此时,磁体3320可以由扁平磁体形成。磁体3320可以形成为平板形状。磁体3320可以形成为长方体形状。
[0934]
磁体3320可以包括多个磁体。磁体3320可以包括四个磁体。磁体3320可以包括第一磁体至第四磁体3321、3322、3333和3334。第一磁体3321可以设置在外壳3310的第一侧部上。第二磁体3322可以设置在外壳3310的第二侧部上。第三磁体3323可以设置在外壳3310的第三侧部上。第四磁体3324可以设置在外壳3310的第四侧部上。
[0935]
镜头驱动设备3010可以包括底座3400。底座3400可以设置在外壳3310下方。底座3400可以设置在骨架3210下方。底座3400可以至少部分地与骨架3210间隔开。底座3400可以耦接到盖3100的侧板3120。底座3400可以设置在骨架3210与传感器保持座之间。底座3400可以与传感器保持座分开形成。然而,作为变型实施例,底座3400可以与传感器保持座一体地形成。
[0936]
底座3400可以包括孔3410。孔3410可以是中空孔。孔3410可以在光轴方向上贯穿底座3400。穿过镜头通过孔3410的光可以入射在图像传感器3060上。
[0937]
底座3400可以包括凹槽3420。底座3400的凹槽3420可以是
‘
粘合剂容纳凹槽’。凹槽3420可以形成在底座3400的上表面上。凹槽3420可以形成在与基板3600的孔3630相对应的位置处。凹槽3420可以形成在与下弹性部分材料3520的孔3522a相对应的位置处。粘合剂可以设置在凹槽3420的至少一部分上。基板3600和下弹性部分材料3520的外侧部3522可以通过粘合剂固定到底座3400。
[0938]
作为变型实施例,底座3400可以包括突起。突起可以形成在底座3400的上表面上。突起可以形成在与基板3600的孔3630相对应的位置处。突起可以形成在与下弹性部分材料3520的孔3522a相对应的位置处。底座3400的突起可以插入到下弹性部分材料3520的孔3522a中和基板3600的孔3630中。即,下弹性部分材料3520的外侧部3522与基板3600的组装位置可以由底座3400的突起对准和/或引导。
[0939]
粘合剂可以设置在凹槽3420的至少一部分上。基板3600和下弹性部分3520的外侧部3522可以通过粘合剂固定到底座3400。
[0940]
底座3400可以包括突出部分3430。突出部分3430可以从底座3400的外侧表面延伸。突出部分3430可以从底座3400的上表面突出。突出部分3430可以形成在底座3400的上表面上。突出部分3430可以围绕底座3400的外周形成。
[0941]
突出部分3430可以包括多个突出部分。突出部分3430可以包括第一突出部分至第三突出部分3431、3432和3433。突出部分3430可以包括:第一突出部分3431,该第一突出部分形成在底座3400的外侧表面的第一侧上;和第二突出部分3432,该第二突出部分形成在
底座3400的外侧表面中的与第一侧相反的第二侧上。
[0942]
底座3400可以包括凹槽3440。凹槽3440可以是端子部分容纳凹槽。凹槽3440可以通过在底座3400的侧表面中凹进而形成。下弹性部分材料3520的端子3524可以设置在凹槽3440中。凹槽3440可以形成为对应于下弹性部分材料3520的端子3524的至少一部分的形状。凹槽3440的深度可以对应于下弹性部分材料3520的端子3524的厚度或者可以大于端子3524的厚度。
[0943]
底座3400可以包括台阶3450。台阶3450可以形成在底座3400的侧表面上。台阶3450可以形成在底座3400的外周表面上。台阶3450可以形成为底座3400的侧表面的下部突出。盖3100的侧板3120的下端可以设置在台阶3450上。
[0944]
底座3400可以包括凹槽3460。凹槽3460可以形成在底座3400的下表面上。凹槽3460可以形成为与底座3400的外周间隔开。传感器保持座可以形状配合到底座3400的凹槽3460中。
[0945]
镜头驱动设备3010可以包括弹性部分材料3500。弹性部分材料3500可以连接外壳3310和骨架3210。弹性部分材料3500可以耦接到外壳3310和骨架3210。弹性部分材料3500可以可移动地支撑骨架3210。弹性部分材料3500可以弹性地支撑骨架3210。弹性部分材料3500可以至少部分地具有弹性。弹性部分材料3500可以在af驱动时支持骨架3210的移动。此时,弹性部分材料3500可以是
‘
af支撑构件’。
[0946]
弹性部分材料3500可以包括上弹性部分材料3510。上弹性部分材料3510可以耦接到骨架3210的上部和外壳3310的上部。上弹性部分材料3510可以耦接到骨架3210的上表面。上弹性部分材料3510可以耦接到外壳3310的上表面。上弹性部分材料3510可以由板簧形成。
[0947]
上弹性部分材料3510可以包括内侧部分3511。内侧部分3511可以耦接到骨架3210。内侧部分3511可以耦接到骨架3210的上表面。内侧部分3511可以包括耦接到骨架320的突起的孔或凹槽。内侧部分3511可以通过粘合剂固定到骨架3210。
[0948]
上弹性部分材料3510可以包括外侧部分3512。外侧部分3512可以耦接到外壳3310。外侧部分3512可以耦接到外壳3310的上表面。外侧部分3512可以包括与外壳3310的突起3313耦接的孔或凹槽。外侧部分3512可以通过粘合剂固定到外壳3310。
[0949]
上弹性部分材料3510可以包括连接部分3513。连接部分3513可以连接外侧部分3512和内侧部分3511。连接部分3513可以具有弹性。此时,连接部分3513可以被称为“弹性部分”。连接部分3513可以包括弯曲两次或更多次的形状。
[0950]
弹性部分材料3500可以包括下弹性部分材料3520。下弹性部分材料3520可以连接骨架3210和底座3400。下弹性部分材料3520可以耦接到骨架3210的下部和外壳3310的下部。下弹性部分材料3520可以耦接到骨架3210的下表面。下弹性部分材料3520可以耦接到外壳3310的下表面。下弹性部分材料3520可以由板簧形成。下弹性部分材料3520的一部分可以被固定在外壳3310与底座3400之间。
[0951]
下弹性部分材料3520可以包括多个下弹性部分材料。下弹性部分材料3520可以包括两种下弹性部分材料。下弹性部分材料3520可以包括第一下弹性部分材料3520-1和第二下弹性部分材料3520-2。第一下弹性部分材料3520-1和第二下弹性部分材料3520-2可以彼此间隔开。第一下弹性部分材料3520-1和第二下弹性部分材料3520-2可以电连接到第一线
圈3220。第一下弹性部分材料3520-1和第二下弹性部分材料3520-2可以用作用于向第一线圈3220施加电流的导线。下弹性部分材料3520可以包括:第一下弹性单元3520-1,该第一下弹性单元电连接到第一线圈3220的一端;和第二下弹性单元3520-2,该第二下弹性单元与第一下弹性单元3520-1间隔开并且电连接到第一线圈3220的另一端。第一下弹性单元3520-1和第二下弹性单元3520-2中的每个下弹性单元可以包括端子3524。
[0952]
下弹性部分材料3520可以包括内侧部分3521。内侧部分3521可以连接到骨架3210。内侧部分3521可以耦接到骨架3210。内侧部分3521可以耦接到骨架3210的下表面。内侧部分3521可以包括与骨架3210的突起耦接的孔或凹槽。内侧部分3521可以通过粘合剂固定到骨架3210。
[0953]
下弹性部分材料3520可以包括外侧部分3522。外侧部分3522可以设置在基板3600的上表面上。外侧部分3522可以直接接触基板3600的上表面。外侧部分3522可以通过粘合剂固定到基板3600的上表面。外侧部分3522可以耦接到基板3600的上表面。外侧部分3522可以固定到底座3400。外侧部分3522可以固定到底座3400的上表面。外侧部分3522可以连接到底座3400。外侧部分3522可以耦接到外壳3310。外侧部分3522可以耦接到外壳3310的下表面。外侧部分3522可以包括耦接到外壳3310的突起的孔或凹槽。外侧部分3522可以通过粘合剂固定到外壳3310。
[0954]
下弹性部分材料3520可以包括形成在外侧部分3522中的孔3522a。外侧部分3522的孔3522a可以形成在对应于基板3600的孔3630和底座3400的凹槽3420的位置处。粘合剂可以设置在外侧部分3522的孔3522a的至少一部分中。
[0955]
下弹性部分材料3520可以包括连接部分3523。连接部分3523可以连接外侧部分3522和内侧部分3521。连接部分3523可以具有弹性。此时,连接部分3523可以被称为
‘
弹性部分’。连接部分3523可以包括弯曲两次或更多次的形状。
[0956]
下弹性部分材料3520可以包括端子3524。端子3524可以从外侧部分3522延伸。端子3524可以连接到外侧部分3522。端子3524可以与外侧部分3522一体形成并且可以从外侧部分3522向下弯曲。在变型实施例中,端子3524可以与下弹性部分材料3520分离地形成。端子3524可以包括两个端子。端子3524可以通过导电构件耦接到印刷电路板3050的端子。此时,导电构件可以是焊料球或导电环氧树脂。端子3524可以设置在底座3400的侧表面上。端子3524可以设置在底座3400的凹槽3440中。两个下弹性部分材料中的每个下弹性部分材料可以包括端子3524。端子3524可以在垂直于光轴的方向上设置在第二线圈3611与底座3400之间。端子3524可以穿透基板3600。端子3524可以穿透基板3600的本体部分3610。
[0957]
镜头驱动设备3010可以包括基板3600。基板3600可以包括柔性印刷电路板(fpcb)。基板3600可以设置在底座3400上。基板3600可以设置在底座3400的上表面上。基板3600的至少一部分可以在光轴方向上与磁体3320重叠。基板3600可以设置在下弹性部分材料3520的外侧部分3522与底座3400之间。
[0958]
基板3600可以包括本体部分3610。本体部分3610可以设置在底座3400的上表面上。本体部分3610可以设置在第一突出部分3431和第二突出部分3432之间。
[0959]
镜头驱动设备3010可以包括第二线圈3611。基板3600可以包括第二线圈3611。基板3600的本体部分3610可以包括第二线圈3611。第二线圈3611可以是感测线圈。第二线圈3611可以设置在底座3400上。第二线圈3611可以设置在底座3400的上表面上。第二线圈
3611的至少一部分可以在光轴方向上与第一线圈3220重叠。第二线圈3611的至少一部分可以在垂直于光轴的方向上与底座3400重叠。第二线圈3611可以形成为基板3600上的图案化线圈。第二线圈3611可以形成为基板3600上的fp线圈(精细图案线圈)。
[0960]
在本实施例中,可以将任意高频信号与用于驱动镜头模块3020的驱动信号合成并施加到第一线圈3220。在一个示例中,驱动信号是用于移动动子3200的信号分量,并且高频信号可以是用于感测动子3200的位置的信号分量。高频信号可以是比驱动信号更高频率的信号。被合成为驱动信号的高频信号可以是大约100khz至大约5mhz。通过与第一线圈3220的相互作用,可以在第二线圈3611中产生感应电流或电压。也就是说,通过施加到第一线圈3220的高频信号可以在第二线圈3611中产生感应电流或电压,并且可以通过测量所产生的感应电流或电压来感测动子3200的位置。
[0961]
在本实施例中,由于第二线圈3611在基板3600上形成为图案化线圈,因此与没有第二线圈3611的开环自动对焦(olaf)模块相比,在相机模块的总长度中可能导致基板3600的厚度增加或更少。
[0962]
在变型实施例中,第二线圈3611可以与基板3600分离地缠绕。第二线圈3611可以与基板3600分离地设置并且可以通过焊接耦接到基板3600。在这种情况下,下弹性部分材料3520可以在没有端子3524的情况下连接到基板3600,并且基板3600的弯曲部可以连接到印刷电路板3050。
[0963]
基板3600的本体部分3610可以包括基板部分3612。基板部分3612可以是基板3600的本体部分3610中不包括第二线圈3611的部分。
[0964]
基板3600可以包括端子部分3620。端子部分3620可以从本体部分3610向下延伸。端子部分3620可以设置在连接底座3400的外侧表面中的第一侧和第二侧的第三侧上。端子部分3620可以设置在第一下弹性单元3520-1的端子3524与第二下弹性单元3520-2的端子3524之间。端子部分3620可以包括电连接到第二线圈3611的两个端子。
[0965]
在变型实施例中,第一下弹性单元3520-1和第二下弹性单元3520-2中的每一个可以电连接到基板3600。此时,基板3600的端子部分3620可以包括四个端子,如图57b中所示。更详细地,基板3600的端子部分3620可以包括电连接到第一线圈3220的两个端子和电连接到第二线圈3611的两个端子。
[0966]
基板3600可以包括孔3630。孔3630可以形成在对应于下弹性部分材料3520的外侧部分3522的孔3522a的位置处。孔3630可以形成在对应于底座3400的凹槽3420的位置处。粘合剂可以设置在孔3630的至少一部分中。
[0967]
在变型实施例中,基板3600可以包括形成在对应于骨架3210的下止挡件3215的位置处的孔。在骨架3210向下移动的情况下,骨架3210的下止挡件3215可以与底座3400而非基板3600接触。因而,其中骨架3210的下止挡件3215连续地撞击基板3600的现象可以防止基板3600的第二线圈3611损坏。
[0968]
下面,将参考附图描述根据本发明的第三实施例的相机模块。
[0969]
图60是根据本发明的第三实施例的相机模块的分解透视图。
[0970]
相机设备3010a可以包括相机模块。
[0971]
相机设备3010a可以包括镜头模块3020。镜头模块3020可以包括至少一个镜头。该镜头可以设置在对应于图像传感器3060的位置处。镜头模块3020可以包括镜头和镜筒。镜
头模块3020可以耦接到镜头驱动设备3010的骨架3210。镜头模块3020可以通过螺钉耦接和/或粘合剂来耦接到骨架3210。镜头模块3020可以与骨架3210一体地移动。
[0972]
相机设备3010a可以包括滤光片3030。滤光片3030可以用于阻挡在穿过镜头模块3020的光中的特定频带的光入射到图像传感器3060上。滤光片3030可以设置成平行于x-y平面。滤光片3030可以设置在镜头模块3020与图像传感器3060之间。滤光片3030可以设置在传感器保持座中。在变型实施例中,滤光片3030可以设置在底座3400上。滤光片3030可以被粘性固定到底座3400的下表面。具有与滤光片3030的形状相对应形状的凹槽可以形成在底座3400的下表面上。滤光片3030可以包括红外滤光片。红外滤光片可以阻挡红外区域中的光入射到图像传感器3060上。
[0973]
相机设备3010a可以包括传感器保持座。传感器保持座可以设置在镜头驱动设备3010和印刷电路板3050之间。传感器保持座可以包括滤光片3030被设置于其上的突出部分341。开口可以形成在传感器保持座的其中布置有滤光片3030的部分中,使得穿过滤光片3030的光可以入射到图像传感器3060上。粘合构件345可以将镜头驱动设备3010的底座3400耦接或附接到传感器保持座。粘合构件345可以另外用于防止外来物质被引入到镜头驱动设备3010中。粘合构件345可以包括环氧树脂、热固性粘合剂和紫外线可固化粘合剂中的任一种或多种。
[0974]
相机设备3010a可以包括印刷电路板(pcb)3050。印刷电路板3050可以是板或电路板。镜头驱动设备3010可以设置在印刷电路板3050上。传感器保持座可以设置在印刷电路板3050和镜头驱动设备3010之间。印刷电路板3050可以电连接到镜头驱动设备3010。图像传感器3060可以设置在印刷电路板3050上。印刷电路板3050可以设置有各种电路、设备、控制单元等,以便将在图像传感器3060上形成的图像转换成电信号并将其传输到外部设备。
[0975]
相机设备3010a可以包括图像传感器3060。图像传感器3060可以是穿过镜头和滤光片3030的光入射以形成图像的配置。图像传感器3060可以安装在印刷电路板3050上。图像传感器3060可以电连接到印刷电路板3050。例如,图像传感器3060可以通过表面安装技术(smt)耦接到印刷电路板3050。作为另一示例,图像传感器3060可以通过倒装芯片技术耦接到印刷电路板3050。图像传感器3060可以设置成使得镜头与光轴重合。也就是说,图像传感器3060的光轴和镜头的光轴可以对齐。图像传感器3060可以将照射到图像传感器3060的有效图像区域的光转换成电信号。图像传感器3060可以是电荷耦合器件(ccd)、金属氧化物半导体(mos)、cpd和cid中的任一种。
[0976]
相机设备3010a可以包括运动传感器3070。运动传感器3070可以安装在印刷电路板3050上。运动传感器3070可以通过被设置在印刷电路板3050上的电路图案而电连接到控制单元3080。由于相机设备3010a的移动,运动传感器3070可以输出旋转角速度信息。运动传感器3070可以包括2轴或3轴陀螺仪传感器或者角速度传感器。
[0977]
相机设备3010a可以包括控制单元3080。控制单元3080可以设置在印刷电路板3050上。控制单元3080可以电连接到镜头驱动设备3010的第一线圈3220和第二线圈3430。控制单元3080可以单独控制被供应给第一线圈3220和第二线圈3430的电流的方向、强度和幅度。控制单元3080可以控制镜头驱动设备3010以执行自动对焦功能和/或图像稳定功能。此外,控制单元3080可以对镜头驱动设备3010执行自动对焦反馈控制和/或手抖动校正反馈控制。
[0978]
相机设备3010a可以包括连接器3090。连接器3090可以电连接到印刷电路板3050。连接器3090可以包括用于电连接到外部设备的端口。
[0979]
下面,将参考附图描述根据本发明的第三实施例的光学装置。
[0980]
图61是根据本发明的第三实施例的光学装置的透视图,并且图62是根据本发明的第三实施例的光学装置的框图。
[0981]
光学装置3010b可以是手机、移动电话、智能手机、便携式智能设备、数码相机、膝上型电脑、数字广播终端、个人数字助理(pda)、便携式多媒体播放器(pmp)以及导航设备中的任一种。然而,光学装置3010b的类型不限于此,用于拍摄图像或图片的任何设备都可以被包括在光学装置3010b中。
[0982]
光学装置3010b可以包括主体3850。主体3850可以具有直板形状。或者,主体3850可以具有各种结构,例如滑盖式、折叠式、摆动式、旋转式,其中两个或更多个子主体被耦接成能够相对移动。主体3850可以包括形成外观的壳(壳体、外壳和盖)。例如,主体3850可以包括前壳3851和后壳3852。光学装置3010b的各种电子组件可以内置在前壳3851和后壳3852之间形成的空间中。显示模块3753可以设置在主体3850的一个表面上。相机3721可以设置在主体3850的一个表面的一个或多个表面上以及与该一个表面相对设置的另一表面上。
[0983]
光学装置3010b可以包括无线通信单元3710。无线通信单元3710可以包括一个或多个模块,该一个或多个模块使得能够在光学装置3010b和无线通信系统之间或者在光学装置3010b和光学装置3010b所在的网络之间进行无线通信。例如,无线通信单元3710可以由广播接收模块3711、移动通信模块3712、无线互联网模块3713、短距通信模块3714以及定位信息模块3715组成。
[0984]
光学装置3010b可以包括a/v输入单元3720。a/v输入单元3720用于输入音频信号或视频信号,并且可以包括相机3721、麦克风3722等。此时,相机3721可以包括根据实施例的相机设备3010a。
[0985]
光学装置3010b可以包括感测单元3740。感测单元3740可以通过检测终端3200a的当前状态,例如终端3200a的打开/关闭状态、终端3200a的位置、是否存在用户接触、终端3200a的定向、终端3200a的加速/减速等,产生用于控制终端3200a的操作的感测信号。例如,当终端3200a为滑盖手机形式时,可以感测滑盖手机是打开还是关闭的。另外,感测单元负责感测与电源单元3790是否被供电、接口单元3770是否耦接到外部设备等相关的功能。
[0986]
光学装置3010b可以包括输入/输出单元3750。输入/输出单元3750用于产生与视觉、听觉或触摸相关的输入或输出。输入/输出单元3750可以产生用于光学装置3010b的操作控制的输入数据,另外,可以显示由光学装置3010b处理的信息。
[0987]
输入/输出单元3750可以包括小键盘单元3751、触摸屏面板3752、显示模块3753以及声音输出模块3754中的任一个或多个。小键盘单元3751可以响应于小键盘输入来产生输入数据。触摸屏面板3752可以将由于用户在触摸屏的特定区域上的触摸而产生的电容变化转换成电输入信号。显示模块3753可以输出由相机3721拍摄的图像。显示模块3753可以包括其颜色根据电信号而改变的多个像素。例如,显示模块3753可以包括液晶显示器、薄膜晶体管-液晶显示器、有机发光二极管、柔性显示器和3d显示器中的至少一种。声音输出模块3754可以在呼叫信号接收、呼叫模式、记录模式、语音识别模式或广播接收模式等中输出从
无线通信单元3710接收到的音频数据,或者可以输出存储器单元3760中存储的音频数据。
[0988]
光学装置3010b可以包括存储器单元3760。用于处理和控制控制单元3780的程序可以存储在存储器单元3760中。另外,存储器单元3760可以存储输入/输出数据,例如,电话簿、消息、音频、静止图像、照片和移动图像中的任一个或多个。存储器单元3760可以存储由相机3721拍摄的图像(例如照片)或视频。
[0989]
光学装置3010b可以包括接口单元3770。接口单元3770用作用于连接到外部设备的通路,外部设备被连接到光学装置3010b。接口单元3770从外部设备接收数据,接收电力并将电力传输到光学装置3010b内部的每个组件,或者将光学装置3010b内部的数据传输到外部设备。例如,接口单元3770可以包括有线/无线头戴式耳机端口、外部充电器端口、有线/无线数据端口、存储器卡端口、用于连接具有识别模块的设备的端口,以及音频输入/输出(i/o)端口、视频输入/输出(i/o)端口、耳机端口等中的一个或多个。
[0990]
光学装置3010b可以包括控制单元3780。控制单元3780可以控制光学装置3010b的整体操作。控制单元3780可以对语音呼叫、数据通信、视频呼叫等执行相关的控制和处理。控制单元3780可以包括显示控制单元3781,该显示控制单元控制作为光学装置3010b的显示器的显示模块3753。控制单元3780可以包括相机控制单元3782,该相机控制单元控制相机设备3010a。控制单元3780可以包括用于播放多媒体的多媒体模块3783。多媒体模块3783可以设置在控制单元3780中,或者可以与控制单元3780分离地设置。控制单元3780可以执行模式识别处理,该模式识别处理能够将在触摸屏上执行的手写输入或绘图输入分别识别为字符和图像。
[0991]
光学装置3010b可以包括电源单元3790。电源单元3790可以在控制单元3780的控制下接收外部电力或内部电力,以供应每个组件的操作所需的电力。
[0992]
根据本发明第三实施例的镜头驱动设备可以包括本发明第一实施例的感测结构。更详细地,根据本发明第三实施例的镜头驱动设备可以包括根据本发明第一实施例的感测线圈180和位置传感器170。根据本发明第三实施例的镜头驱动设备可以包括本发明第二实施例的感测结构。更详细地,根据本发明第三实施例的镜头驱动设备可以包括根据本发明第二实施例的感应线圈2180和位置传感器2170。
[0993]
本发明的第四实施例可以包括本发明第一实施例的一些配置和本发明第二实施例的一些配置。本发明的第五实施例可以包括本发明第二实施例的一些配置和本发明第三实施例的一些配置。本发明的第六实施例可以包括本发明第一实施例的一些配置和本发明第三实施例的一些配置。本发明的第七实施例可以包括本文发明第一实施例的一些配置、本发明第二实施例的一些配置以及本发明第三实施例的一些配置。更详细地,第一实施例或第二实施例的感测线圈和位置传感器可以应用于本发明的第三实施例。
[0994]
上文已经参考附图描述了本发明的实施例,但是本发明所属领域的技术人员应理解,在不改变技术精神或实质特征的前提下,本发明还可以通过其它具体形式来实施。因此,应当理解,上述实施例在所有方面都是说明性而非限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1