具有布拉格光栅的人工现实系统的制作方法
具有布拉格光栅的人工现实系统
1.相关申请的交叉引用
2.本技术要求于2019年10月14日提交的美国临时专利申请号62/914,673的权益,以其整体内容通过引用并入于此。
技术领域
3.本公开总体涉及人工现实系统,诸如增强现实和/或混合现实系统。
背景技术:
4.人工现实系统在诸如计算机游戏、健康和安全、工业和教育的许多领域中具有应用。作为几个示例,人工现实系统正在被合并到移动设备、游戏控制台、个人计算机、电影院和主题公园中。一般而言,人工现实是在呈现给用户之前已经以某种方式调整的现实的形式,人工现实可以包括例如虚拟现实、增强现实、混合现实、杂混现实或其某种组合和/或衍生物。
5.人工现实系统通常使用头戴式显示器(hmd)来向用户呈现图像。为了让用户舒适地察看由hmd显示的图像,光学系统被用来对光线进行整形并且将其引导到用户的眼睛。由于用户将hmd戴在头上,因此尺寸和重量是重要的考虑因素。此外,减少或消除图像伪影或失真对于实现舒适的察看体验是重要的。
技术实现要素:
6.一般而言,本公开描述了人工现实系统,并且更具体地,描述了包括光学组件的人工现实系统,光学组件包括用于将光耦合进和/或耦合出波导的至少一个布拉格光栅。例如,布拉格光栅被描述为具有所选择的属性,使得对于多个不同的光波长,布拉格光栅具有相似的衍射效率和衍射角。例如,本文描述的布拉格光栅可以具体被配置为:对于对应于光谱内的绿色、红色和蓝色区域的光的波长,表现出相似的衍射效率和衍射角。布拉格光栅可以是反射布拉格光栅或透射布拉格光栅。这可以允许减少数目的波导(例如,单个波导)被用作人工现实系统内的光学元件,以用于控制和输出绿光、红光和蓝光,从而减小人工现实系统的尺寸和/或重量和/或降低人工现实系统的对齐和组装的复杂性。
7.在一个或多个示例方面,本技术描述了一种光学组件,包括:波导;以及布拉格光栅,布拉格光栅被配置为将光耦合进或耦合出波导,其中布拉格光栅包括多个层对,其中至少一个层对包括具有第一折射率的第一材料和具有第二折射率的第二层,并且其中布拉格光栅的属性被选择,使得对于至少两种颜色的光,布拉格光栅表现出实质相似的衍射效率和衍射角。
8.布拉格光栅可以包括反射布拉格光栅。
9.布拉格光栅可以包括透射布拉格光栅。
10.布拉格光栅的属性可以被选择,使得对于具有第一波长的第一光和具有第二波长的第二光,布拉格光栅可以表现出实质相似的衍射效率,其中第一波长可以与第二波长相
差至少50nm。
11.布拉格光栅的属性可以被选择,使得对于三种颜色的光,布拉格光栅表现出实质相似的衍射效率。三种颜色的光可以包括:波长在约430nm与约450nm之间的光、波长在约525nm与约550nm之间的光,以及波长在约650nm与约675nm之间的光。
12.对于第一光的衍射级可以与第二光的衍射级不同的至少两种颜色的光,布拉格光栅可以表现出实质相似的衍射效率。
13.属性可以包括以下至少一项:第一折射率、第二折射率、第一折射率和第二折射率的平均、或层对的厚度。
14.层对可以限定一个主平面,其中波导可以限定一个主平面,并且其中层对的主平面可以与波导的主平面以非平行且非垂直的角度被定向。
15.多个层对中的每个层对可以包括第一材料和第二材料,并且其中每个层对的厚度可以实质相同。
16.布拉格光栅可以是输入耦合光栅。
17.布拉格光栅可以是输出耦合光栅。
18.布拉格光栅可以是输入耦合光栅,还可以包括输出耦合光栅,其中输出耦合光栅可以包括:第二多个层对,其中第二多个层对中的第二层对可以包括具有第三折射率的第三材料和具有第四折射率的第四层,并且其中输出耦合光栅的属性可以被选择,使得对于至少两种颜色的光,输出耦合光栅可以表现出实质相似的衍射效率和衍射角。
19.光学组件还可以包括投影仪,投影仪被配置为经由布拉格光栅将光引导到波导中。
20.在一个或多个示例方面,本技术描述了一种头戴式显示器,其包括投影仪和光学组件。光学组件包括:波导;以及布拉格光栅,布拉格光栅被配置为将光耦合进或耦合出波导,其中布拉格光栅包括多个层对,其中层对包括具有第一折射率的第一材料和具有第二折射率的第二层,其中布拉格光栅的属性被选择,使得对于至少两种颜色的光,布拉格光栅表现出实质相似的衍射效率和衍射角,并且其中投影仪被配置为将光引导到波导中。
21.布拉格光栅的属性可以被选择,使得对于波长在约430nm与约450nm之间的光、波长在约525nm与约550nm之间的光,以及波长在约650nm与约675nm之间的光,布拉格光栅可以表现出实质相似的衍射效率。
22.属性可以包括第一折射率、第二折射率、第一折射率和第二折射率的平均或层对的厚度中的至少一个。
23.层对可以限定一个主平面,其中波导可以限定一个主平面,并且其中层对的主平面可以与波导的主平面以非平行且非垂直的角度被定向。
24.布拉格光栅可以是输入耦合光栅,还可以包括输出耦合光栅,其中输出耦合光栅可以包括:第二多个层对,其中第二多个层对中的第二层对可以包括具有第三反射率的第三材料和具有第四反射率的第四层,并且其中输出耦合光栅的属性可以被选择,使得对于至少两种颜色的光,输出耦合光栅可以表现出实质相似的衍射效率。
25.在一个或多个示例方面,本技术描述了一种方法,方法包括:确定布拉格光栅的属性,使得对于至少两种颜色的光,布拉格光栅表现出实质相似的衍射效率和衍射角,其中布拉格光栅被配置为将光耦合进或耦合出波导,其中布拉格光栅包括多个层对,其中层对包
括具有第一折射率的第一材料和具有第二折射率的第二层;以及将布拉格光栅与波导组装。
26.一个或多个示例的细节在附图和以下描述中被阐述。从描述和附图以及从权利要求,其他特征、目的和优点将是明显的。
附图说明
27.图1是描绘根据本公开中描述的技术的示例人工现实系统的图示,该示例人工现实系统包括用于将光耦合进和/或耦合出波导的至少一个布拉格光栅。
28.图2a是描绘根据本公开中描述的技术的示例hmd的图示,该示例hmd包括用于将光耦合进和/或耦合出波导的至少一个布拉格光栅。
29.图2b是描绘根据本公开中描述的技术的另一示例hmd的图示,该另一示例hmd包括用于将光耦合进和/或耦合出波导的至少一个布拉格光栅。
30.图3是示出根据本公开中描述的技术的,图1的人工现实系统的控制台和hmd的示例实施方式的框图。
31.图4是描绘根据本公开中描述的技术的人工现实系统的独立hmd的示例的框图。
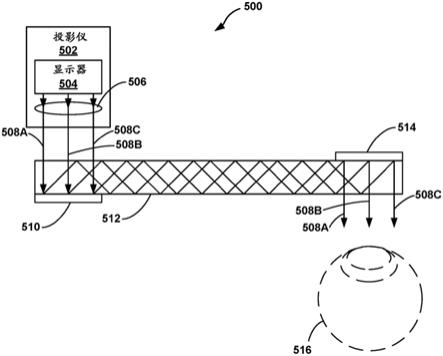
32.图5a和图5b是图示包括投影仪、波导以及输入和输出耦合光栅的示例光学系统的概念图。
33.图6是图示示例反射布拉格光栅的概念图。
34.图7是图示另一示例反射布拉格光栅的概念图。
35.图8是示例反射布拉格光栅的模拟反射率对波长的绘图。
36.图9是示例反射布拉格光栅的模拟反射效率对波长的绘图。
37.图10是示例反射布拉格光栅和具有446nm波长的光的模拟反射效率对入射角的绘图。
38.图11是示例反射布拉格光栅和具有536nm波长的光的模拟反射效率对入射角的绘图。
39.图12是示例反射布拉格光栅和具有670nm波长的光的模拟反射效率对入射角的绘图。
40.图13是图示示例透射布拉格光栅的概念图。
41.图14-图16是示例透射布拉格光栅的模拟电磁场强度对衍射角的绘图。
具体实施方式
42.图1是描绘根据本公开中描述的技术的示例人工现实系统的图示,该示例人工现实系统包括具有至少一个布拉格光栅的光学组件。在图1的示例中,人工现实系统100包括hmd 112、一个或多个控制器114a和114b(统一地,“(多个)控制器114”),并且在一些示例中可以包括一个或多个外部传感器90和/或控制台106。
43.hmd 112通常由用户110穿戴,并且包括用于向用户110呈现人工现实内容122的电子显示器和光学组件。此外,hmd 112包括用于跟踪hmd 112的运动的一个或多个传感器(例如,加速度计),并且可以包括用于捕获周围物理环境的图像数据的一个或多个图像捕获设备138(例如,相机、线扫描仪)。尽管被图示为头戴式显示器,但ar系统100可以备选地或附
加地包括用于向用户110呈现人工现实内容122的眼镜或其他显示设备。
44.每个控制器114是输入设备,用户110可以使用它来向人工现实系统100的控制台106、hmd 112或另一部件提供输入。(多个)控制器114可以包括一个或多个存在敏感表面,用于通过检测一个或多个触摸或悬停在存在敏感表面的位置之上的对象(例如手指、笔)的存在,来检测用户输入。在一些示例中,(多个)控制器114可以包括输出显示器,输出显示器可以是存在敏感显示器。在一些示例中,(多个)控制器114可以是智能手机、平板计算机、个人数据助理(pda)或其他手持设备。在一些示例中,(多个)控制器114可以是智能手表、智能环或其他可穿戴设备。(多个)控制器114也可以是信息亭或其他固定或移动系统的一部分。备选地或附加地,(多个)控制器114可以包括其他用户输入机构,诸如一个或多个按钮、触发器、操纵杆、方向键等,以使用户能够与由人工现实系统100呈现给用户110的人工现实内容122的方面进行交互和/或控制。
45.在该示例中,控制台106被示为单个计算设备,诸如游戏控制台、工作站、台式计算机或膝上型计算机。在其他一些示例中,控制台106可以跨多个计算设备分布,诸如分布式计算网络、数据中心或云计算系统。如该示例中所示,控制台106、hmd 112和传感器90可以经由网络104通信耦合,网络104可以是有线或无线网络,诸如wi-fi、网状网络或短程无线通信介质,或它们的组合。尽管hmd 112在该示例中被示为与控制台106通信,例如,连接到控制台106或与控制台106无线通信,但在一些实施方式中,hmd 112作为独立的移动人工现实系统操作,并且人工现实系统100可以省略控制台106。
46.一般而言,人工现实系统100绘制人工现实内容122以在hmd112处显示给用户110。在图1的示例中,用户110察看由在hmd 112和/或控制台106上执行的人工现实应用构建和绘制的人工现实内容122。在一些示例中,人工现实内容122可以是完全人工的,即与用户110所在的环境无关的图像。在一些示例中,人工现实内容122可以形成增强现实或混合现实的一部分,其中人工现实内容122被显示在现实世界视图之上并且与现实世界视图协调。在一些示例中,人工现实内容122可以包括现实世界图像(例如,用户110的手、(多个)控制器114、用户110附近的其他环境对象)和虚拟对象的混合,以产生混合现实和/或增强现实。在一些示例中,虚拟内容项可以被映射(例如,固定、锁定、放置)到例如相对于现实世界的特定位置。虚拟内容项的位置可以是固定的,例如相对于墙壁或大地之一。虚拟内容项的位置可以是可变的,例如相对于(多个)控制器114或用户。在一些示例中,虚拟内容项在人工现实内容122内的特定位置与现实世界、物理环境内的位置相关联(例如,在物理对象的表面上)。
47.在操作期间,人工现实应用构建人工现实内容122,以通过跟踪和计算针对参考框架(通常,hmd 112的察看视角)的位姿信息来显示给用户110。使用hmd 112作为参考框架,并且基于由hmd 112的当前估计位姿确定的当前视场,人工现实应用绘制3d人工现实内容,在一些示例中,该内容可以至少部分地覆盖在用户110的现实世界、3d物理环境上。在该过程期间,人工现实应用使用从hmd 112接收的感测数据,诸如移动信息和用户命令,并且在一些示例中,使用来自任何外部传感器90(诸如外部相机)的数据,来捕获3d现实世界、物理环境内的信息,诸如用户110的运动和/或关于用户110的特征跟踪信息。基于感测的数据,人工现实应用确定针对hmd 112的参考框架的当前位姿,并且根据当前位姿,绘制人工现实内容122。
48.人工现实系统100可以基于用户110的当前视场130,触发虚拟内容项的生成和绘制,当前视场130可以通过用户的实时注视跟踪或其他条件来确定。更具体地,hmd 112的图像捕获设备138捕获图像数据,该图像数据表示在图像捕获设备138的视场130内的现实世界物理环境中的对象。视场130通常对应于hmd 112的察看视角。在一些示例中,人工现实应用覆盖现实世界地呈现人工现实内容122,人工现实内容122包括混合现实和/或增强现实。在一些示例中,人工现实应用可以绘制现实世界对象的图像,诸如外围设备136、用户110的手132和/或手臂134的部分,它们在视场130内,沿着诸如在人工现实内容122内的虚拟对象。在其他一些示例中,人工现实应用可以绘制外围设备136、用户110的手132和/或手臂134的部分的虚拟表示,它们在人工现实内容122内的视场130内(例如,将现实世界对象绘制为虚拟对象)。在任一示例中,用户110能够察看他们的手132、手臂134、外围设备136和/或在人工现实内容122内的视场130内的任何其他现实世界对象的部分。在其他一些示例中,人工现实应用可以不绘制用户的手132或手臂134的表示。
49.根据本公开的技术,hmd 112包括光学系统,该光学系统包括至少一个布拉格光栅,用于将光耦合进和/或耦合出波导。例如,光可以是从为用户110产生人工现实内容122的投影仪或显示器输出的光。如本文所描述的,光学系统的一个或多个布拉格光栅可以被配置为:对于多个波长或波长范围的光,表现出相似的衍射效率和衍射角。例如,至少一个布拉格光栅可以被配置为对于红光、绿光和蓝光表现出相似的衍射效率。另外,至少一个布拉格光栅可以被配置为:以基本相似的衍射角,将多个不同波长或波长范围(例如,红光、绿光和蓝光波长范围)的光耦合进和/或耦合出波导。至少一个布拉格光栅可以包括反射布拉格光栅、透射布拉格光栅或反射布拉格光栅和透射布拉格光栅两者。
50.在一些示例中,至少一个布拉格光栅被构造为包括多个层对。此外,在一些示例中,层对中的至少一些层对包括包含第一材料的第一层和包含第二材料的第二层,其中第一材料具有第一折射率并且第二材料具有不同于第一折射率的第二折射率。通过适当地选择第一和第二折射率以及第一和第二层的厚度,至少一个布拉格光栅可以被构造成对于多个波长的光表现出相似的衍射效率和衍射角。例如,针对第一波长的光的选择衍射级的衍射效率和衍射角可以与针对第二波长的光的选择衍射级的衍射效率和衍射角相似。对于第一和第二波长的光,选择的衍射级可以不同。在一些示例中,第一波长和第二波长可以不同至少阈值量,诸如至少50nm或至少75nm。例如,第一波长可以是来自光谱的蓝色部分的波长,并且第二波长可以是来自光谱的绿色部分或红色部分的波长。
51.通过包括至少一个表现出本文描述的属性的布拉格光栅,单个波导可以用于多种颜色的光,图像伪影减少。例如,在使用单个输入耦合光栅和单个输出耦合光栅(对于不同波长的光(例如,光的颜色)不表现出相似的衍射效率和/或衍射角)的光学组件中,输出图像可以包括与输入图像不同的颜色强度,并且可能由于不同波长的不同衍射角而表现出像差。这些缺陷的一种解决方案是使用多个波导,每个波导具有相关联的耦合光栅,该耦合光栅被配置为衍射选择的波长或波长范围。这可以解决颜色问题和衍射角问题中的一些问题,但由于增加了部件数量,可能引入附加的成本、重量和/或尺寸。此外,精确对齐多个波导可能是困难的,并且导致制造复杂性和成本增加。
52.相反,本文描述的布拉格光栅可以允许使用单个波导,该单个波导具有用于多个波长的光的单个输入耦合光栅和/或单个输出耦合光栅。这可以减少部件数量,从而降低光
学组件的成本、重量和/或尺寸,并且与使用多个波导的光学组件相比可以简化制造,同时仍然提供可接受的光学性能。
53.图2a是描绘根据本公开中描述的技术的示例hmd 112的图示,hmd 112包括具有至少一个布拉格光栅的光学组件。图2a的hmd112可以是图1的hmd 112的示例。hmd 112可以是人工现实系统(诸如图1的人工现实系统100)的一部分,或者可以作为被配置为实现本文描述的技术的独立、移动虚拟现实系统操作。
54.在该示例中,hmd 112包括前刚性主体,并且包括用于将hmd112固定到用户的带。此外,hmd 112包括面向内部的电子显示器203,其被配置为经由光学组件205向用户呈现人工现实内容。电子显示器203可以是任何适当的显示技术,包括例如液晶显示器(lcd)、有机发光二极管(oled)显示器、发光二极管(led显示器,例如microled显示器)、有源矩阵oled(amoled)显示器、硅上液晶(lcos)显示器等。在一些示例中,电子显示器是立体显示器或者是用于向用户的每个眼睛提供单独图像的两个显示器。在一些示例中,当跟踪hmd 112的位置和定向以根据hmd 112和用户的当前察看视角来绘制人工现实内容时,显示器203相对于hmd 112的前刚性主体的已知定向和位置被用作参考框架,也被称为局部原点。在其他一些示例中,hmd 112可以采取其他可穿戴头戴式显示器的形式,诸如眼镜或护目镜。
55.光学组件205包括光学元件,该光学元件被配置为管理由电子显示器203输出的光以供hmd 112的用户(例如,图1的用户110)察看。例如,光学元件可以包括一个或多个透镜、一个或多个衍射光学元件、一个或多个反射光学元件、一个或多个波导等,其操纵(例如,透镜、反射、折射、衍射、引导等)由电子显示器203输出的光。光学组件205可以包括波导和至少一个布拉格光栅,该布拉格光栅被配置为将光耦合进和/或耦合出波导。例如,光学组件205可以是本文参考图1和图5-图7描述的任何光学组件。
56.如图2a进一步所示,在该示例中,hmd 112还包括一个或多个运动传感器206,诸如输出指示hmd 112的当前加速度的数据的一个或多个加速度计(也被称为惯性测量单元或“imu”)、输出指示hmd 112的位置的数据的gps传感器、输出指示hmd 112与各种对象的距离的数据的雷达或声纳,或提供hmd 112或物理环境内的其他对象的位置或定向的指示的其他传感器。此外,hmd 112可以包括集成图像捕获设备138a和138b(统一地,“图像捕获设备138”),诸如视频相机、激光扫描仪、多普勒雷达扫描仪、深度扫描仪等,集成图像捕获设备被配置为输出表示物理环境的图像数据。更具体地,图像捕获设备138捕获表示物理环境中的对象(包括外围设备136和/或手132)的图像数据,该对象在图像捕获设备138的视场130a、130b内,视场130a、130b通常对应于hmd 112的视角。hmd 112包括内部控制单元210,内部控制单元210可以包括内部电源和一个或多个印刷电路板,该印刷电路板具有一个或多个处理器、存储器和硬件,以提供用于执行可编程操作以处理感测的数据并且在显示器203上呈现人工现实内容的操作环境。
57.图2b是描绘根据本公开中描述的技术的另一示例hmd 112的图示。如图2b中所示,hmd 112可以采取眼镜的形式。图2a的hmd112可以是图1的hmd 112的示例。hmd 112可以是人工现实系统(诸如图1的人工现实系统100)的一部分,或者可以作为被配置为实现本文描述的技术的独立、移动虚拟现实系统操作。
58.在该示例中,hmd 112是包括前框架的眼镜,该前框架包括允许hmd 112搁置在用户的鼻子和太阳穴上的桥(或“臂”),该桥在用户的耳朵上延伸以将hmd 112固定到用户。前
框架和臂将透镜定位在用户眼前。透镜可以包括光学组件的至少一部分,该光学组件被配置为:接收来自投影仪或显示器的光,并且将光重定向以供用户察看。例如,投影仪可以被安装到hmd 112的前框架或镜腿,并且例如在自由场中或通过波导向透镜投射光。透镜可以包括将光引向用户眼睛的一个或多个层或涂层。以该方式,图2b的hmd 112可以有效地包括被配置为向用户呈现人工现实内容的一个或多个面向内部的显示器203a和203b(统一地,“显示器203”),并且可以有效地包括被配置为管理由显示器203输出的光的一个或多个光学组件205a和205b(统一地,“光学组件205”)。在一些示例中,当跟踪hmd 112的位置和定向以根据hmd 112和用户的当前察看视角来绘制人工现实内容时,hmd 112的显示器203或透镜相对于hmd 112的前框架的已知定向和位置被用作参考框架,也被称为局部原点。
59.如图2b中进一步所示,在该示例中,hmd 112还包括一个或多个运动传感器206、一个或多个集成图像捕获设备138a和138b(统一地,“图像捕获设备138”)、内部控制单元210,内部控制单元210可以包括内部电源和一个或多个印刷电路板,该印刷电路板具有一个或多个处理器、存储器和硬件,以提供用于执行可编程操作以处理感测的数据并且在显示器203上呈现人工现实内容的操作环境。
60.图3是示出根据本公开中描述的技术的,包括控制台106和hmd112的人工现实系统的示例实施方式的框图。在图3的示例中,控制台106基于感测的数据(诸如,从hmd 112和/或外部传感器接收的运动数据和图像数据),对hmd 112执行位姿跟踪、姿势检测和用户界面生成和绘制。
61.在该示例中,hmd 112包括一个或多个处理器302和存储器304,在一些示例中,一个或多个处理器302和存储器304提供了用于执行操作系统305的计算机平台,操作系统305例如可以是嵌入式、实时多任务操作系统,或其他类型的操作系统。操作系统305又提供用于执行一个或多个软件部件307的多任务操作环境,包括应用引擎340。如关于图2a和图2b的示例讨论的,处理器302耦合到电子显示器203、运动传感器206、图像捕获设备138,并且在一些示例中,还耦合到光学组件205。在一些示例中,处理器302和存储器304可以是分开的分立组件。在其他一些示例中,存储器304可以是与处理器302并置在单个集成电路内的片上存储器。
62.一般而言,控制台106是计算设备,其处理从图像捕获设备138接收的图像和跟踪信息,以执行hmd 112的姿势检测和用户界面和/或虚拟内容生成。在一些示例中,控制台106是单个计算设备,诸如工作站、台式计算机、膝上型计算机或游戏系统。在一些示例中,控制台106的至少一部分(诸如处理器312和/或存储器314)可以跨云计算系统、数据中心分布,或跨网络分布,网络诸如是因特网、另一个公共或私人通信网络,例如宽带、蜂窝、wi-fi和/或用于在计算系统、服务器和计算设备之间传送数据的其他类型的通信网络。
63.在图3的示例中,控制台106包括一个或多个处理器312和存储器314,在一些示例中,一个或多个处理器312和存储器314提供用于执行操作系统316的计算机平台,操作系统316可以是例如嵌入式、实时多任务操作系统或其他类型的操作系统。操作系统316又提供用于执行一个或多个软件部件317的多任务操作环境。处理器312耦合到一个或多个i/o接口315,i/o接口315提供一个或多个i/o接口以用于与外部设备通信,外部设备诸如是键盘、(多个)游戏控制器、(多个)显示设备、(多个)图像捕获设备、(多个)hmd、外围设备等。此外,一个或多个i/o接口315可以包括一个或多个有线或无线网络接口控制器(nic),以用于与
诸如网络104的网络通信。
64.控制台106的软件应用317操作以提供整体的人工现实应用。在该示例中,软件应用317包括应用引擎320、绘制引擎322、姿势检测器324、位姿跟踪器326和用户界面引擎328。
65.一般而言,应用引擎320包括提供和呈现人工现实应用的功能,例如电话会议应用、游戏应用、导航应用、教育应用、训练或模拟应用等。应用引擎320可以包括例如一个或多个软件包、软件库、硬件驱动器和/或应用程序接口(api),用于在控制台106上实现人工现实应用。响应于应用引擎320的控制,绘制引擎322生成3d人工现实内容,以由hmd 112的应用引擎340显示给用户。
66.根据参考框架的当前位姿信息,应用引擎320和绘制引擎322构造人工内容,以显示给用户110,参考框架通常是由位姿跟踪器326确定的hmd 112的察看视角。基于当前察看视角,绘制引擎322构建3d人工现实内容,在一些情况下,该3d人工现实内容可以至少部分覆盖在用户110的现实世界3d环境上。在该过程期间,位姿跟踪器326对从hmd 112接收的感测数据(诸如移动信息和用户命令,以及在一些示例中,来自诸如外部相机的任何外部传感器90(图1)的数据)操作,以捕获现实世界环境内的3d信息,诸如用户的运动110和/或关于用户110的特征跟踪信息。基于感测的数据,位姿跟踪器326确定针对hmd 112的参考框架的当前位姿,并且根据当前位姿,构建人工现实内容以经由一个或多个i/o接口315通信到hmd112以显示给用户110。
67.位姿跟踪器326可以确定hmd 112的当前位姿,并且根据当前位姿,触发与任何绘制的虚拟内容相关联的某些功能(例如,将虚拟内容项放置到虚拟表面上,操纵虚拟内容项,生成和绘制一个或多个虚拟标记,生成和绘制激光指示器)。在一些示例中,位姿跟踪器326检测hmd 112是否接近对应于虚拟表面(例如,虚拟钉板)的物理位置,以触发虚拟内容的绘制。
68.用户界面引擎328被配置为生成用于在人工现实环境中绘制的虚拟用户界面。用户界面引擎328生成虚拟用户界面,以包括一个或多个虚拟用户界面元素329,诸如虚拟绘图界面、可选菜单(例如,下拉菜单)、虚拟按钮、方向键、键盘或其他用户可选择的用户界面元素、字形、显示元素、内容、用户界面控件等。
69.控制台106可以经由通信通道,将该虚拟用户界面和其他人工现实内容输出到hmd 112以在hmd 112处显示。
70.基于来自任何图像捕获设备138或其他传感器设备的感测数据,姿势检测器324分析控制器114和/或用户110的对象(例如,手、手臂、手腕、手指、手掌、拇指)的跟踪运动、配置、位置和/或定向,以标识用户110执行的一个或多个姿势。更具体地,姿势检测器324分析在由hmd 112的图像捕获设备138和/或传感器90和外部相机102捕获的图像数据内识别的对象,以标识(多个)控制器114和/或用户110的手和/或手臂,并且跟踪(多个)控制器114、手和/或手臂相对于hmd 112的移动,以标识用户110执行的姿势。在一些示例中,姿势检测器324可以基于捕获的图像数据来跟踪(多个)控制器114、手、手指和/或手臂的移动,包括位置和定向的改变,并且将对象的运动矢量与姿势库330中的一个或多个条目进行比较,以检测用户110执行的姿势或姿势组合。在一些示例中,姿势检测器324可以接收由(多个)控制器114的存在敏感表面检测的用户输入,并且处理用户输入以检测由用户110相对于(多
个)控制器114执行的一个或多个姿势。
71.图4是描绘根据本公开中描述的技术的,其中hmd 112是独立的人工现实系统的示例的框图。在该示例中,与图3相似,hmd 112包括一个或多个处理器302和存储器304,在一些示例中,一个或多个处理器302和存储器304提供用于执行操作系统305的计算机平台,操作系统305可以是例如嵌入式、实时多任务操作系统或其他类型的操作系统。操作系统305又提供用于执行一个或多个软件部件417的多任务操作环境。此外,(多个)处理器302耦合到(多个)电子显示器203、(多个)变焦光学系统205、运动传感器206和图像捕获设备138。
72.在图4的示例中,软件部件417操作以提供整体的人工现实应用。在该示例中,软件应用417包括应用引擎440、绘制引擎422、姿势检测器424、位姿跟踪器426和用户界面引擎428。在各种示例中,软件部件417与图3的控制台106的对应部件(例如,应用引擎320、绘制引擎322、姿势检测器324、位姿跟踪器326和用户界面引擎328)类似地操作,以构建覆盖在人工内容上或作为人工内容的一部分的虚拟用户界面以显示给用户110。
73.类似于关于图3描述的示例,基于来自任何图像捕获设备138或102、(多个)控制器114或其他传感器设备的感测数据,姿势检测器424分析(多个)控制器114和/或用户的对象(例如,手、手臂、手腕、手指、手掌、拇指)的跟踪运动、配置、位置和/或定向来标识用户110执行的一个或多个姿势。
74.图5a是图示示例光学组件500的概念图,示例光学组件500包括投影仪502、波导512以及输入耦合光栅510和输出耦合光栅514。输入耦合光栅510和输出耦合光栅514包括如本文描述的反射布拉格光栅。作为一个示例,光学组件500可以表示如本文描述的人工现实系统的hmd 112的光学元件,诸如用于生成并向用户110输出显示内容的显示器203和光学系统205的元件。
75.在该示例中,投影仪502包括显示器504和光学系统506。显示器504可以包括适当的显示器类型,包括例如lcd、oled显示器、led显示器(例如microled显示器)、有源矩阵oled(amoled)显示器、硅上液晶(lcos)显示器等。显示器504输出指向光学系统506的光508a、508b、508c(统一地,“光508”)。光508可以包括多个波长,例如三个波长。例如,第一光508a可以包括第一波长,第二光508b可以包括第二波长,并且第三光508c可以包括第三波长。作为示例,第一光508a可以包括红光,红光具有在约635nm与约700nm之间(诸如,在约665nm与约675nm之间或约670nm)范围内的波长或波长范围;第二光508b可以包括绿光,绿光具有在约520nm与约560nm之间(诸如,在约530nm与约540nm之间或约536nm)的波长或波长范围,并且第三光508c可以包括蓝光,蓝光具有在约440nm与约490nm之间(诸如,在约440nm与约450nm之间或约446nm)的波长。通常,光508可以包括至少两个波长或波长范围。在一些示例中,波长或波长范围可以不同至少约50nm,或至少约75nm。作为示例,波长范围可以包括约2nm、约5nm或约10nm的范围。
76.光学系统506可以是投影仪502的一部分,并且接收来自显示器504的光508。光学系统506可以包括一个或多个光学元件,该光学元件被配置为将来自显示器504的光引导到波导512。例如,光学系统506可以包括一个或多个透镜元件、一个或多个偏振控制元件、一个或多个反射器等,以控制由显示器输出的光。在一些示例中,光学系统506可以基本准直(例如准直或接近准直)由显示器504输出的光。
77.波导512包括任何适当材料或材料组合,以用于将光从波导512的一部分(例如,邻
近输入耦合光栅510)引导到波导512的另一部分(例如,邻近输出耦合光栅514)。例如,波导512可以包括芯材料和涂层材料,其中芯材料和涂层材料被选择,使得它们的折射率支持光的至少一些输入角度的全内反射。作为另一示例,波导512可以包括具有与空气充分不同的折射率的材料,使得波导512对于光的至少一些输入角度表现出全内反射。
78.输入耦合光栅510和输出耦合光栅514被配置为分别将光耦合进波导512和耦合出波导512。可以对输入耦合光栅510和/或输出耦合光栅514使用任何适当的耦合光栅,包括例如表面浮雕光栅、全息光栅等。在一些示例中,输入耦合光栅510和/或输出耦合光栅514是反射光栅,如图5中所示。在其他一些示例中,输入耦合光栅510或输出耦合光栅514之一或两者可以是透射光栅。
79.输入耦合光栅510被配置为接收来自投影仪502(例如,投影仪502的光学系统506)的光508,并且将光的至少一部分耦合到波导512内的全内反射(tir)中。输出耦合光栅514被配置为将光508从波导512输出耦合,并且将光508引向察看者(例如,hmd 112的用户)的眼睛516。
80.根据本公开的示例,输入耦合光栅510或输出耦合光栅514中的至少一个包括如本文所述配置的布拉格光栅。在一些示例中,输入耦合光栅510或输出耦合光栅514中的仅一个包括如本文所述的布拉格光栅。在其他一些示例中,输入耦合光栅510和输出耦合光栅514中的两个包括如本文所述构造的布拉格光栅。至少一个布拉格光栅可以被配置为对于多个不同波长(诸如在光谱的红色、绿色和/或蓝色区域内的(多个)波长范围)的光,表现出相似的衍射效率和衍射角。即,作为一个示例,至少一个布拉格光栅可以被配置为对红光、绿光和蓝光(例如,第一光508a、第二光508b和第三光508c)表现出相似的衍射效率。尽管仅示出了单个输入耦合光栅510和单个输出耦合光栅514,但是多个光栅可以被用作输入和/或输出耦合光栅。此外,图5a图示了其中输入耦合光栅510和输出耦合光栅514两者是反射布拉格光栅的示例。
81.图5b是图示示例光学组件520的概念图,示例光学组件520包括投影仪502、波导512以及输入耦合光栅530和输出耦合光栅534。除了输入耦合光栅530和输出耦合光栅534包括如本文所述的透射布拉格光栅之外,光学组件520基本上类似于图5a的光学组件500。在其他一些示例中,输入耦合光栅530或输出耦合光栅534中的一个可以包括反射布拉格光栅,并且输入耦合光栅530或输出耦合光栅534中的另一个可以包括透射布拉格光栅。
82.图6是图示示例反射布拉格光栅600的概念图,在一些示例中,反射布拉格光栅600可以被用于光栅510、514中的任何一个。在图6的示例中,反射布拉格光栅600包括多个层对602。层对602中的一个层对包括第一材料的第一层(例如,第一层604a)和第二材料的第二层(例如,第二层606a)。在一些示例中,诸如在图6中所示,多个层对602中的每个层对在成分和厚度上基本相似(例如,在制造限制内相同)。例如,多个层对602中的每个层对可以包括相应的第一层604a-604n(统一地,“第一层604”)和相应的第二层606a-606n(统一地,“第二层606”)。在其他一些示例中,层对中的至少一个层对包括与层对中的另一个层对不同的属性(例如,层成分、厚度等)。
83.第一层604的第一材料表现出第一折射率。第二层606的第二材料表现出第二折射率。第一折射率和第二折射率不同,并且可以不同至少约0.1,或至少约0.2,或至少约0.25,或约0.3。例如,第一层604的第一材料可以表现出约1.5的第一折射率,并且第二层606的第
二材料可以表现出约1.8的第二折射率(对于大约0.3的差异)。第一层604和第二层606中的每个层可以包括任何适当的材料,诸如聚合物、玻璃等。例如,第一层604中的每个第一层可以包括第一聚合物,并且第二层606中的每个第二层可以包括第二聚合物。以该方式,反射布拉格光栅600包括在具有不同折射率的材料之间的多个界面,在这些界面处可以出现反射和/或折射。
84.第一层604和第二层606中的每个层可以具有选择的厚度。在一些示例中,层对中的第一层604和第二层606的厚度基本相同(例如,在制造容差内相同)。在其他一些示例中,在层对内,第一层604的厚度可以不同于第二层606的厚度。层对的厚度t1可以被称为布拉格间距。在一些示例中,布拉格间距t1可以在约800nm与约900nm之间,诸如在约800nm与约825nm之间。
85.类似地,在一些示例中,第一层604中的每个第一层可以具有基本相同的厚度(例如,在制造容差内相同)。在一些示例中,第二层606中的每个第二层可以具有基本相同的厚度(例如,在制造容差内相同)。在其他一些示例中,第一层604中的至少一个第一层可以具有与第一层604中的另一个第一层不同的厚度,和/或第二层606中的至少一个第二层可以具有与第二层606中的另一个第二层不同的厚度。
86.第一层604和第二层606的厚度可以基于反射布拉格光栅600要反射的期望波长来选择。在一些示例中,厚度可以是数百纳米的量级。
87.反射布拉格光栅600可以包括任何适当数目的层对602。在一些示例中,更多的层对602可以增加反射布拉格光栅600的衍射效率,以便反射更大比例的入射光。在一些示例中,反射布拉格光栅600可以包括至少十个层对602,诸如至少15个层对602或数十个层对602。在其他一些示例中,反射布拉格光栅600可以包括少于十个层对602或多于100个层对602。反射布拉格光栅600的多个层对602的总厚度t2可以是层对的数目乘以布拉格间距t1。在一些示例中,多个层对602的总厚度t2在几十微米的量级,诸如在约10微米与约20微米之间。
88.反射布拉格光栅600还包括底部基板608和顶部基板610。底部基板608和顶部基板610可以被配置为对反射布拉格光栅600提供结构支撑。底部基板608和顶部基板610可以包括对由投影仪502输出以入射到反射布拉格光栅600的光508的波长基本透明的任何材料。在一些示例中,底部基板608和顶部基板610可以包括玻璃、聚合物等。在一些实施方式中,底部基板608和顶部基板610之一或两者可以被省略,并且例如,反射布拉格光栅600可以直接形成在波导(例如,波导512)上。
89.在图6的示例中,层604和层606的主表面(或主平面)基本平行于底部基板608和顶部基板610的主平面。层604和层606的主表面(或主平面)也可以基本平行于波导512的主表面,反射布拉格光栅600被配置为将光耦合进或耦合出该波导512。
90.通过适当地选择第一层604和第二层606的第一和第二折射率以及厚度,反射布拉格光栅600对于多个选择波长的光508,可以表现出相似的衍射效率和/或衍射角。例如,针对第一波长的光508a的选择衍射级的衍射效率和/或衍射角,可以类似于针对第二波长的光508b的选择衍射级的衍射效率和/或衍射角,和/或可以类似于针对第三波长的光508c的选择衍射级的衍射效率和/或衍射角。对于第一和第二(和第三)波长的光508a、508b和508c,选择的衍射级可以不同。
91.为了选择用于构造反射布拉格光栅600的属性,等式2*n
ave
*pitch*cos(α)=m*λ(其中n
ave
是层对601的平均折射率((n1+n2)/2);pitch是布拉格间距t1;α是光508的入射角;m是衍射级,λ是光的波长)可以结合选择的n
ave
、pitch、α和λ的值,来求解m的整数值,以确定对于给定的反射布拉格光栅600(即,具有选择成分和几何形状的层604和606的反射布拉格光栅600),哪些波长将衍射。当m的整数值对于所需的光波长满足该方程时,反射布拉格光栅600针对所需波长中的每个波长的衍射效率可以使用仿真程序来被确定,仿真程序诸如是comsol建模软件,可从马萨诸塞州伯灵顿的comsol,inc.获得;或lcdmaster 3d,可从德克萨斯州休斯顿的shintech,inc.获得。所得的反射布拉格光栅600对于所需的光波长可以表现出基本相似的衍射效率。如本文所使用的,在一些示例中,“基本相似的衍射效率”是指在约10%以内,在一些示例中,在约5%以内,或在一些示例中,在2%以内的衍射效率。
92.例如,反射布拉格光栅600可以包括以下属性:第一层604的第一折射率:1.5;第二层606的第二折射率:1.8;布拉格间距t1:813nm;总厚度t2:约15微米;入射角:90度(垂直)。这种反射布拉格光栅600对于约446nm、约536nm和约670nm的光可以表现出基本相似的衍射效率,并且对于三个波长中的每个波长,衍射效率可以大于约0.75。
93.在一些示例中,第一层604和第二层606不是被定向为基本平行于波导512的主表面,而是第一层604和第二层606可以被定向成与波导512的主表面成一定角度,以促进将光508耦合到具有全内反射的波导512中,或促进将光508耦合出波导512。图7是图示另一个示例反射布拉格光栅700的概念图。与反射布拉格光栅600相似,反射布拉格光栅700包括多个层对602,层对包括第一层604和第二层606。在一些示例中,每个层对602层对在成分和厚度上基本相同。在其他一些示例中,至少一个层对在成分和/或厚度方面不同于另一个层对。反射布拉格光栅700还包括底部基板608和顶部基板610。
94.与反射布拉格光栅600不同,反射布拉格光栅700中的第一层604和第二层606相对于波导512的主表面成一定角度定向。在图7中,在第一层604和第二层606的主表面与底部基板608(以及因此波导512)的表面的法线之间限定了倾斜角θ。倾斜角θ可以被选择以促进将光508耦合到具有全内反射的波导512中,或促进将光508耦合出波导512。在一些示例中,倾斜角θ可以在约55
°
与约70
°
之间,诸如约65
°
。
95.如图7中所示,反射布拉格光栅700限定了布拉格间距t3,布拉格间距t3在基本垂直于第一层604和第二层606的主表面的方向上被测量。反射布拉格光栅700还限定了水平间距t5,水平间距t5与布拉格间距t3和倾斜角θ有关。
96.反射布拉格光栅700的属性可以使用等式2*n
ave
*pitch*cos(α)=m*λ来被选择,如参考反射布拉格光栅600所描述的。作为示例,反射布拉格光栅700可以包括以下属性:第一层604的第一折射率:1.5;第二层606的第二折射率:1.8;布拉格间距t1:897nm;总厚度t5:约15微米;入射角:90度(垂直);倾斜角θ:65
°
;水平间距:2.12μm。这种反射布拉格光栅700对于约446nm、约536nm和约670nm的光,可以表现出基本相似的衍射效率和衍射角,并且对于三个波长中的每个波长,衍射效率可以大于约0.75(例如,在约0.75与约0.85之间)。
97.图8是具有以下属性的反射布拉格光栅的模拟反射率和透射率对波长的绘图:第一层604的第一折射率:1.5;第二层606的第二折射率:1.8;布拉格间距t1:813nm;总厚度t2:约15微米;入射角:90度(垂直)。如图8中所示,对于具有三种不同波长的光,反射率基本
相似。
98.图9是示例反射布拉格光栅的模拟反射效率对波长的绘图。反射布拉格光栅具有以下属性:第一层604的第一折射率:1.5;第二层606的第二折射率:1.8;布拉格间距t1:897nm;总厚度t5:约15微米;入射角:90度(垂直);倾斜角θ:65
°
;水平间距:2.12μm。如图9中所示,预期这种反射布拉格光栅对于具有三个不同波长的光表现出基本相似的衍射效率和衍射角,并且对于三个波长中的每个波长,衍射效率可以大于约0.75(例如,在约0.75与约0.85之间)。
99.图10是示例倾斜反射布拉格光栅(如图7中所示的那个)和446nm波长的光的模拟反射效率对入射角的绘图。图11是示例倾斜反射布拉格光栅和536nm波长的光的模拟反射效率对入射角的绘图。图12是示例倾斜反射布拉格光栅和670nm波长的光的模拟反射效率对入射角的绘图。如图10-图12中所示,由于光栅是反射光栅并且双折射低,因此视场较窄。
100.图13是图示示例透射布拉格光栅800的概念图,在一些示例中,透射布拉格光栅800可以被用于光栅530、534中的任何一个。在图13的示例中,透射布拉格光栅800包括多个层对802。层对802中的一个层对包括第一材料的第一层(例如,第一层804a)和第二材料的第二层(例如,第二层806a)。在一些示例中,诸如图13中所示,多个层对802中的每个层对在成分和厚度上基本相似(例如,在制造限制内相同)。例如,多个层对802中的每个层对可以包括相应的第一层804a-804n(统一地,“第一层804”)和相应的第二层806a-806n(统一地,“第二层806”)。在其他一些示例中,层对中的至少一个层对包括与层对中的另一个层对不同的属性(例如,层成分、厚度等)。
101.第一层804的第一材料表现出第一折射率。第二层806的第二材料表现出第二折射率。第一和第二折射率不同,并且可以不同至少约0.1,或至少约0.2,或至少约0.25,或约0.3。例如,第一层804的第一材料可以表现出约1.5的第一折射率,并且第二层806的第二材料可以表现出约1.8的第二折射率(对于大约0.3的差异)。第一层804和第二层806中的每个层可以包括任何适当的材料,诸如聚合物、玻璃等。例如,第一层804中的每个第一层可以包括第一聚合物,并且第二层806中的每个第二层可以包括第二聚合物。以该方式,透射布拉格光栅800包括在具有不同折射率的材料之间的多个界面,在这些界面处可以出现反射和/或折射。
102.第一层804和第二层806中的每个层可以具有选择的厚度。在一些示例中,层对中的第一层804和第二层806的厚度基本相同(例如,在制造容差内相同)。在其他一些示例中,在层对内,第一层804的厚度可以不同于第二层806的厚度。层对的厚度t3可以被称为布拉格间距。在一些示例中,布拉格间距t3可以在约800nm与约900nm之间,诸如在约800nm与约825nm之间或在约875nm与900nm之间。
103.类似地,在一些示例中,第一层804中的每个第一层可以具有基本相同的厚度(例如,在制造容差内相同)。在一些示例中,第二层806中的每个第二层可以具有基本相同的厚度(例如,在制造容差内相同)。在其他一些示例中,第一层804中的至少一个第一层可以具有与第一层804中的另一个第一层不同的厚度,和/或第二层806中的至少一个第二层可以具有与第二层806中的另一个第二层不同的厚度。
104.第一层804的厚度和第二层806的厚度可以基于透射布拉格光栅800衍射入射光的所需波长来被选择。在一些示例中,厚度可以是数百纳米的量级。
105.透射布拉格光栅800可以包括任何适当数目的层对802。在一些示例中,透射布拉格光栅800可以包括至少十个层对802,诸如几十个或几百个层对802。
106.透射布拉格光栅800还包括底部基板808和顶部基板810。底部基板808和顶部基板810可以被配置为对透射布拉格光栅800提供结构支撑。底部基板808和顶部基板810可以包括对由投影仪502输出以入射在透射布拉格光栅800上的光508的波长基本透明的任何材料。在一些示例中,底部基板808和顶部基板810可以包括玻璃、聚合物等。在一些实施方式中,底部基板808和顶部基板810之一或两者可以被省略,并且例如,透射布拉格光栅800可以直接形成在波导(例如,波导512)上。
107.在图13的示例中,层804和806的主表面(或主平面)基本上垂直于底部基板808和顶部基板810的主平面。层804和806的主表面(或主平面)也可以基本垂直于波导512的主表面,透射布拉格光栅800被配置为将光耦合进或耦合出该波导512。
108.通过适当地选择第一层804和第二层806的第一和第二折射率以及厚度,透射布拉格光栅800对于多个选择波长的光508,可以表现出相似的衍射效率和/或衍射角。例如,针对第一波长的光508a的选择衍射级的衍射效率和/或衍射角,可以类似于针对第二波长的光508b的选择衍射级的衍射效率和/或衍射角,和/或可以类似于针对第三波长的光508c的选择衍射级的衍射效率和/或衍射角。对于第一和第二(和第三)波长的光508a、508b和508c,选择的衍射级可以不同。
109.透射布拉格光栅800可以具有厚度t4,厚度t4被选择以实现入射光812到输出光814的期望重定向。例如,透射布拉格光栅可以具有在约5微米与约20微米之间的厚度,诸如约8微米。
110.为了选择用于构造透射布拉格光栅800的属性,等式2*n
ave
*pitch*cos(α)=m*λ(其中n
ave
是层对802的平均折射率((n1+n2)/2);pitch是布拉格间距t1;α是光508的入射角;m是衍射级,λ是光的波长)可以结合选择的n
ave
、pitch、α和λ的值,来求解m的整数值,以确定对于给定的透射布拉格光栅800(即,具有选择成分和几何形状的层804和806的透射布拉格光栅800),哪些波长将衍射。当m的整数值对于所需的光波长满足该方程时,透射布拉格光栅800针对所需波长中的每个波长的衍射效率可以使用仿真程序来被确定,仿真程序诸如是comsol建模软件,可从马萨诸塞州伯灵顿的comsol,inc.获得;或lcdmaster 3d,可从德克萨斯州休斯顿的shintech,inc.获得。所得的透射布拉格光栅800对于所需的光波长可以表现出基本相似的衍射效率。如本文所使用的,在一些示例中,“基本相似的衍射效率”是指在约10%以内,在一些示例中,在约5%以内,或在一些示例中,在2%以内的衍射效率。
111.例如,透射布拉格光栅800可以包括以下属性:第一层804的第一折射率:1.5;第二层806的第二折射率:1.8;布拉格间距t3:897nm;总厚度t4:约8微米;入射角:约65度。这种透射布拉格光栅800对于约447nm、约536nm和约670nm的光可以表现出基本相似的衍射效率和衍射角,并且对于三个波长中的每个波长,衍射效率可以大于约0.90(90%)。
112.图14是示例透射布拉格光栅(如图13中所示的那个)和447nm波长的光的模拟电磁场强度对衍射角的绘图。6阶衍射效率为约98.6%。图15是示例透射布拉格光栅(如图13中所示的那个)和536nm波长的光的模拟电磁场强度对衍射角的绘图。5阶衍射效率为约99.6%。图16是示例透射布拉格光栅(如图13中所示的那个)和670nm波长的光的模拟电磁
场强度对衍射角的绘图。四阶衍射效率为约91.5%。此外,如图14-图16中所示,对于447nm、536nm和670nm的光,衍射角基本相似。
113.如本文通过各种示例描述的,本公开的技术可以包括人工现实系统或者结合人工现实系统来实现。如所述的,人工现实是在呈现给用户之前已经以某种方式调整过的现实形式,其可以包括例如虚拟现实(vr)、增强现实(ar)、混合现实(mr)、混杂现实或其某种组合和/或衍生物。人工现实内容可以包括完全生成的内容或与捕获的内容(例如,现实世界的照片或视频)相结合的生成的内容。人工现实内容可以包括视频、音频、触觉反馈或它们的某种组合,并且它们中的任何一个都可以在单个通道或多个通道中呈现(诸如,向察看者产生三维效果的立体视频)。另外,在一些实施例中,人工现实可以与应用、产品、附件、服务或其某种组合相关联,这些应用、产品、附件、服务或其某种组合例如用于在人工现实中创建内容和/或在人工现实中使用(例如,在人工现实中执行活动)。提供人工现实内容的人工现实系统可以在各种平台上实现,这些平台包括连接到主计算机系统的头戴式设备(hmd)、独立的hmd、移动设备或计算系统或者能够向一个或多个察看者提供人工现实内容的任何其他硬件平台。
114.本公开中描述的技术可以至少部分地以硬件、软件、固件或其任意组合来实现。例如,所描述的技术的各个方面可以在一个或多个处理器中实现,包括一个或多个微处理器、dsp、专用集成电路(asic)、现场可编程门阵列(fpga)或任何其他等效的集成或分立逻辑电路系统,以及这些部件的任何组合。术语“处理器”或“处理电路系统”通常可以指任何前述逻辑电路系统,单独或与其他逻辑电路系统组合,或任何其他等效电路系统。包括硬件的控制单元也可以执行本公开的一种或更多种技术。
115.这种硬件、软件和固件可以在同一设备内或在单独的设备内实现,以支持本公开中描述的各种操作和功能。此外,任何描述的单元、模块或部件可以一起或单独实现为分立但可互操作的逻辑设备。将不同特征描述为模块或单元旨在突出不同的功能方面,并不一定意味着这些模块或单元必须由单独的硬件或软件部件来实现。相反,与一个或多个模块或单元相关联的功能可以由单独的硬件或软件部件来执行,或者集成在公共或单独的硬件或软件部件中。
116.本公开中描述的技术也可以包含或编码在包含指令的计算机可读介质中,诸如计算机可读存储介质。嵌入或编码在计算机可读存储介质中的指令可以使可编程处理器或其他处理器执行该方法,例如,当指令被执行时。计算机可读存储介质可以包括随机存取存储器(ram)、只读存储器(rom)、可编程只读存储器(prom)、可擦除可编程只读存储器(eprom)、电子可擦除可编程只读存储器(eeprom)、闪存、硬盘、cd-rom、软盘、磁带、磁性介质、光学介质或其它计算机可读介质。
117.如本文通过各种示例描述的,本公开的技术可以包括人工现实系统或结合人工现实系统来实现。如所述的,人工现实是在呈现给用户之前已经以某种方式调整过的现实形式,其可以包括例如虚拟现实(vr)、增强现实(ar)、混合现实(mr)、混杂现实或其某种组合和/或衍生物。人工现实内容可以包括完全生成的内容或与捕获的内容(例如,现实世界的照片或视频)相结合的生成的内容。人工现实内容可以包括视频、音频、触觉反馈或它们的某种组合,并且它们中的任何一个都可以在单个通道或多个通道中呈现(诸如,向察看者产生三维效果的立体视频)。另外,在一些实施例中,人工现实可以与应用、产品、附件、服务或
其某种组合相关联,这些应用、产品、附件、服务或其某种组合例如用于在人工现实中创建内容和/或在人工现实中使用(例如,在人工现实中执行活动)。提供人工现实内容的人工现实系统可以在各种平台上实现,这些平台包括连接到主计算机系统的头戴式设备(hmd)、独立的hmd、移动设备或计算系统或者能够向一个或多个察看者提供人工现实内容的任何其他硬件平台。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1