包括两个微镜的集成电子模块和包括电子模块的系统的制作方法
包括两个微镜的集成电子模块和包括电子模块的系统
1.优先权声明
2.本技术要求于2020年9月25日提交的意大利专利申请第102020000022715号的优先权,其公开内容通过引用整体并入。
技术领域
3.本公开涉及一种包括反射器,特别是mems微镜的电子模块,以及一种包括或集成电子模块的系统。
背景技术:
4.已知微机械镜结构至少部分地由半导体材料制成,并且使用mems(微机电系统)技术获得。这种微机械结构通常集成在便携式设备中,例如便携式计算机、膝上型电脑、笔记本电脑(包括超薄笔记本电脑)、pda、平板电脑和智能手机。这种与便携式设备的集成用于光学应用,特别是用于以期望的方式引导由光源产生的光辐射束。
5.由于此类结构的尺寸小,因此此类结构可以满足在面积和厚度方面对空间占用的严格要求。
6.例如,微型机械镜结构(或微镜,通常通过mems技术获得)用于微型投影仪模块(所谓的微型投影仪),它们能够远距离投射图像或生成所需的光图案。
7.与图像捕获模块结合,这种类型的投影仪模块可以例如获得用于形成三维图像的三维(3d)摄影机或摄像机。
8.前述微机械反射镜结构通常包括反射镜元件和支撑元件,反射镜元件从半导体材料体开始获得的反射镜元件,从而例如利用倾斜或旋转运动以期望的方式引导入射光束;支撑元件也从半导体材料体开始获得,该支撑元件耦接至具有支撑和处理功能的镜元件。在支撑元件中形成空腔,该空腔设置在反射镜元件的下方且对应于反射镜元件的位置,从而使其能够自由移动以使其倾斜或旋转。
9.已知类型的微型投影仪使用能够围绕两个轴旋转的微镜,以便执行扫描二维区域的运动。特别地,在一些解决方案中,微镜系统包括一对微镜,它们被控制以便围绕两个相互垂直的旋转轴旋转。
10.此外,随着深度检测技术的引入,3d检测现在普遍应用于智能手机和便携式设备上。特别是,这项技术有望通过面部识别来创新安全方法。
11.用于实现3d检测的已知方法之一是基于飞行时间(tof)方法。典型的tof架构包括红外(ir)源,该源被配置为生成红外脉冲(发射光束)并将其导向物体。在一些应用中,物体反射的光束被微镜接收,微镜将反射光束导向检测器。在其他应用中,微镜被布置在发射器的水平面上,以生成一个击中目标的点阵列,接收器接收从目标反射的脉冲作为响应。通过测量发射脉冲或光束与反射脉冲或光束之间的时间(直接tof)或相位偏移(间接tof)来计算深度。另一种用于实现3d检测的已知方法是基于结构光。在这种情况下,一个已知的图案被投影到一个物体上;这样投影的图案会被物体扭曲,并且对光图案的扭曲分析可用于计
算深度值并实现物体形状的几何重建。
12.例如,图1是一个系统(通常可以应用于投影仪或3d检测系统)的示意图,其中光源1、通常是激光源产生光束2,该光束通过光学器件3被一对微镜5、6偏转。第一微镜5例如可以是水平微镜,其围绕第一轴a旋转并产生水平扫描,第二微镜6例如可以是垂直微镜,其围绕第二横轴b旋转,特别是垂直于第一轴a,并产生垂直扫描。两个微镜5、6的运动组合使光束2进行完整的二维扫描运动,并且一旦投射到投影屏幕7上,就在其上产生二维图像。例如,在美国专利申请公开第20110234898号(国际专利公开wo2010/067354)中描述了这样的系统,通过引用并入。
13.已知类型的实施例设想微镜5、6被手动安装在电子设备中,微镜被设计用于该电子设备,每个微镜已经固定到相应的支撑件,以形成两个相应的镜组件。
14.在安装过程中,操作员拿起两个反射镜组件,一个用于水平微镜,另一个用于垂直微镜,并将两个组件定位成所需的对准状态(例如,准直光束可用于获得所需的对准)。接下来,操作者涂上可以通过紫外线聚合的胶,然后将两个镜子组件固定在操作位置。
15.上述类型的组装缓慢、困难且容易出错。因此,使用这种方法,正确安装的零件的生产率和产量不是最佳的。
16.其他实施例,例如在美国专利第10,338,378号(欧洲专利号ep3206071)中描述的实施例,通过引用并入本文,设想将水平和垂直的两个微镜组装在同一金属框架上,并将其通过电引线接合至已经固定到框架上的相应电连接元件(挠性印刷电路)。然后将框架弯曲以便以期望的相互角度布置来设置两个微镜。弯曲步骤可以自动执行,无需人工干预,使用类似于半导体工业中用于在标准集成电路封装中成型连接导体的成型机。框架可以由传送带连同多个类似的框架一起运送,并且单个框架可以在单个弯曲步骤之后分离。
17.因此,本领域需要一种能够克服上述问题而不影响性能的技术方法。
技术实现要素:
18.本文的实施例涉及一种包括两个反射器,特别是mems微镜的电子模块,以及一种包括该电子模块的系统,其将克服上述现有技术的缺陷。
19.例如,本文公开的是一种电子模块,包括:半导体材料的第一管芯,包括第一反射器;半导体材料的第二管芯,包括第二反射器;框架,包括第一支撑部与第二支撑部,第一支撑部和第二支撑部彼此平行延伸;其中第一和第二管芯分别由第一和第二支撑部承载,并且分别布置为使得第一反射器面向第二支撑部、并且第二反射器面向第一支撑部。
20.第一反射器和第二反射器可以彼此交错。
21.第一支撑部和第二支撑部可以彼此间隔开地布置,从而在框架内部限定间隙。
22.第一支撑部可以具有:在其中限定的第一腔,所述第一腔被配置为至少部分地容纳第一管芯,使得第一反射器面向间隙;以及穿过第一支撑部横向于第一腔的第一贯穿口。第二支撑部具有:在其中限定的第二腔,所述第二腔被配置为至少部分地容纳第二管芯,使得第二反射器面向间隙;以及穿过第二支撑部横向于第二腔的第二贯穿口。
23.第一支撑部还可以具有限定在其中的第一贯穿口,所述第一贯穿口横向于所述第一腔布置。第二支撑部还可以具有限定在其中的第二贯穿口,所述第二贯穿口横向于所述第二腔布置。
24.所述第一反射器、所述第二反射器、所述第一开口和所述第二开口相互布置,使得光束通过所述第一和第二开口中的一个开口进入所述间隙,击中所述第一反射器或所述第二反射器,向第一反射器和第二反射器中的另一个反射器偏转,并通过第一开口和第二开口中的另一个开口离开间隙。
25.第一开口和第二开口中的至少一个开口具有涂覆有抗反射材料的内壁,所述抗反射材料成形为限制开口内的多次反射。
26.第一开口和第二开口中的至少一个开口具有内壁,所述内壁成形为限制开口内的多次反射。
27.框架可以是整体式的。
28.第一支撑部和第二支撑部通过具有第一连接部结合在一起,所述第一连接部在公共连接部处结合所述第一支撑部和所述第二支撑部的弯曲区域。
29.第一支撑部和所述第二支撑部还耦接至第二连接部,所述第二连接部具有将第一支撑部和第二支撑部结合在一起的相应弯曲区域。
30.第一支撑部和第二支撑部可以具有矩形形状,并且第一连接部和第二连接部在第一支撑部和第二支撑部的相对侧延伸。
31.在一些情况下,第一连接部和第二连接部可以与所述第一支撑部和第二支撑部不共面。
32.第一支撑部和第二支撑部分别承载第一电连接元件和第二电连接元件,第一管芯耦接至第一电连接元件,并且第二管芯耦接至第二电连接元件。
33.第一电连接元件可以是刚挠型板,第一管芯耦接至第一电连接元件的刚性部。第二电连接元件可以是刚挠型板,第二管芯耦接至第二电连接元件的刚性部。
34.第一电连接元件还可以在第一电连接元件的挠性部上承载第一电连接器。第二电连接元件还可以在第二电连接元件的挠性部上承载第二电连接器。
35.第一支撑部和第二支撑部也可以通过第一连接部结合在一起,第一连接部具有在公共连接部处结合第一支撑部和第二支撑部的弯曲区域。承载第一电连接器的挠性部可以在公共连接部的第一侧上延伸,并且承载第二电连接器的挠性部可以在公共连接部的与第一侧相对的第二侧上延伸。
36.第一电连接元件可包括印刷在第一支撑部上的导电轨道。第二电连接元件可以包括印刷在第二支撑部上的导电轨道。
37.第一支撑部和第二支撑部可以通过第一连接部结合在一起,第一连接部具有在公共连接部处结合第一支撑部和第二支撑部的弯曲区域。
38.公共连接部可以承载第一电连接器和第二电连接器,第一支撑部上的导电轨道电连接至第一电连接器,第二支撑部上的导电轨道电连接至第二电连接器。
39.第一和第二反射器可以是微镜反射器。第一和第二反射器中的至少一个可以被配置为关于静止位置振荡。
40.第一支撑部和第二支撑部可以密封地耦接在一起,使得间隙相对于电子模块外部的环境流体隔离,并且间隙可以由液态或气态流体填充。
41.本文还公开了一种包括电子模块的系统。电子模块可以包括:包括第一反射器的半导体材料的第一管芯;包括第二反射器的半导体材料的第二管芯;包括相互平行的第一
支撑部和第二支撑部的框架。第一管芯和第二管芯分别由第一支撑部和第二支撑部承载,并且分别布置成使得第一反射器面向第二支撑部、并且第二反射器面向第一支撑部。第一光束的发生器被布置和配置成向第一反射器提供第一光束。检测器被配置为接收来自第二反射器的第二反射光束并产生转换信号。可操作地耦接至检测器的处理单元被配置为执行转换信号的处理。
42.该系统可以被配置为限定微型投影仪、3d检测系统或lidar系统。
43.当系统被配置为限定3d检测系统时,处理可以包括通过结构光方法和/或飞行时间方法来执行对象或物体的3d检测。
附图说明
44.为了更好地理解,现在仅通过非限制性示例并参考附图来描述其优选实施例,其中:
45.图1是根据已知类型的实施例的可用作微型投影仪或用于3d感测应用的电子系统的示意性透视图;
46.图2a以剖视图示出了根据本公开一个方面的模块,其包括支撑元件以及相应的电连接器,该支撑元件承载两个刚挠类型的电子板,电子板上安装有相应的反射器、特别是微镜;
47.图2b以剖视图示出了图2a的支撑元件;
48.图2c以透视图示出了图2a的模块的两个电子板,其上安装有相应的反射器。
49.图3以示意性剖视图示出了处于使用状态的图2a的模块;
50.图4示意性并以剖视图示出了根据本公开一个方面的刚挠类型板,其适用于安装反射器、特别是微镜以及相应的连接器;以及
51.图5是集成或使用图2a的模块的系统的功能块示意图。
52.图6以剖视图示出了图2b的支撑元件的变体。
具体实施方式
53.以下公开内容使本领域技术人员能够制造和使用本文公开的主题。在不脱离本公开的精神和范围的情况下,本文描述的一般原理可以应用于除了上面详述的那些之外的实施例和应用。本公开并不旨在限于所示的实施例,而是符合与本文公开或建议的原理和特征一致的最宽范围。
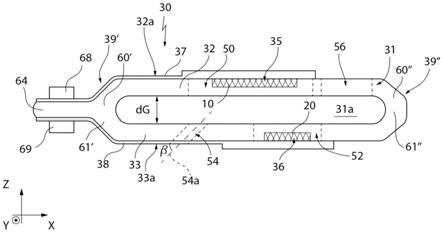
54.图2a以在相互正交的轴x、y、z的三轴参考系统中的剖视图示出了要安装在电子设备(未示出)中的模块30。
55.图2b以与图2a相同的截面图和相同的参考系统示出了模块30的框架31。
56.图2c是在与图2a和2b的参考系统相同的参考系统中的刚挠电子板的透视图,该电子板(两端“断裂”用于更清晰的表示)适于连接至框架31以产生模块30。
57.共同参考图2a-2c,框架31是整体式的,并且包括适于容纳第一管芯35的第一支撑部32和适于容纳第二管芯36的第二支撑部33。第一支撑部32平行于第二支撑部33并延伸远离第二支撑部33距离dg。
58.很明显,在各个实施例中,框架31可以是单件或者可以由结合(例如接)在一起的
不同元件构成。
59.第一支撑部32在两个连接区域39'、39”处被连接至第二支撑部33,连接区域39'、39”设置有相应的倒弧或弯曲部,将第一和第二支撑部32、33结合在一起。以此方式,在第一和第二支撑部32、33之间存在间隙31a,根据模块30被设计用于的特定应用,该间隙31a可以是空的(即,存在空气或一些其他气体)或填充有适当的材料(例如液体或凝胶等)。
60.在一个实施例中,支撑部32、33和连接区域39'、39”形成流体密封结构,即,由它们在内部限定的空间31a与外部环境流体隔离。
61.在一个实施例中,连接区域39”同样可以被省略(即,它不存在),第一和第二支撑部32、33仅在连接区域39'处彼此连接。该实施例可以在图6中看到。
62.在进一步的实施例中,连接区域39”例如通过合适的耦接-解耦系统(例如插头和插座类型的)可释放地耦接至第一和第二支撑部32、33,使得如果需要,连接区域39"可被移除并稍后重新插入。
63.在进一步的实施例中,连接区域39”是具有第一和第二支撑部32、33的单件(即,它们形成整体块)。
64.在进一步的实施例中,连接区域39”以不可释放的方式焊接或通过胶或其他粘合剂固定到第一和第二支撑部32、33。
65.框架31可以是金属材料,例如阳极氧化铝、或塑料材料,或某些其他材料、例如陶瓷材料或玻璃,或根据需要选择的其他材料。
66.例如使用半导体微加工技术制造的第一管芯35集成了第一反射器10,特别是使用mems技术生产的反射器(也称为微镜)。特别是使用半导体微加工技术制造的第二管芯36集成了第二反射器20,特别是使用mems技术制造的反射器(微镜)。第一和第二反射器10、20被配置为耦接至激活或控制系统(两个反射器共用或专用于每个反射器),其在操作时导致相应的mems反射器关于静止位置振荡。这种类型的微镜例如在美国专利第9,843,779号和美国专利申请第2018/0180873号中有所描述,两者均通过引用并入。
67.在任何情况下都可以使用其他类型的反射器或微镜,这对于本领域技术人员来说是显而易见的。特别地,本公开不限于致动反射器的特定技术(压电、静电等)。
68.第一反射器10被配置为围绕第一振荡轴振荡,而第二反射器20被配置为围绕与第一振荡轴横向(特别是正交)的相应第二振荡轴振荡。
69.可替代地,在进一步的实施例中,第一和第二反射器10、20中的一个或两个可以被设计和配置为沿两个振荡轴振荡。
70.可替代地,在另一实施例中,第一和第二反射器10、20之间的一个反射器可以是固定类型的(即,它不振荡)。
71.框架31承载两个电连接结构37、38(每个管芯35、36一个),其例如作为挠性印刷电路来获得,更具体地作为其中形成(具体地,嵌入)有电气连接线(未详细表示)的挠性印刷电路来获得。电连接结构37、38、特别是它们中的每个的电连接线,例如通过引线接合电连接至管芯35、36。电连接结构37耦接(例如胶合)至第一支撑部32的表面32a;电连接结构38耦接(例如,胶合)至第二支撑部33的表面33a。
72.很明显,如果第一和第二反射器10、20之间的一个是固定类型的,则相应电连接结构37或38的电连接线可以省略,或者如果存在则不使用。
73.第一支撑部32包括被配置用于容纳第一管芯35的壳体50,第二支撑部33包括被配置用于容纳第二管芯36的壳体52。壳体50和壳体52在相应的支撑部32、33中具有贯穿口,并且这些壳体具有的形状和尺寸使得相应的第一和第二管芯35、36以稳定的方式插入相应的外壳50、51中,并且相应的反射器10、20面向间隙31a,因此面对相对的支撑部分32、33。换句话说,由管芯35承载的第一反射器10面向第二支撑部33,该管芯被插入在第一支撑部32中构成的外壳50中。同样地,由管芯36承载的第二反射器20面向第一支撑部32,该管芯被插入在第二支撑部33中构成的外壳51中。
74.此外,第二支撑部33具有通孔54,其被配置为使例如由图1所示并由参考数字1示出(例如,激光来源)类型的源产生的入射光辐射或光束能够通过。光源适于产生光束,该光束在使用中被反射器10、20偏转,以在模块30的输出处发射。为此,第一支撑部32还具有通孔56,其被配置使出射光束、即被第二反射器20反射的光束能够通过。通孔56可以由模块30的不同部分中的通用开口代替(例如,通过消除连接区域39”,并使模块30在图中所示的区域39”处开口)。
75.在该实施例中,通孔54具有大致圆柱形的形状,其轴线54a与由第二部33限定的平面(特别是与第二部33的表面33a)形成大约45
°
的角β。角β的值可以在任何情况下变化并在25
°
和65
°
之间的范围内选择(其中β=0
°
表示孔54的轴线54a平行于第二支撑部33的表面33a,且β=90
°
表示孔54的轴线54a与第二支撑部33的表面33a正交)。然而,可以相对于上述值改变角β,例如达到90
°
的值,前提是入射光束可以击中第一反射器10而不会被孔54的内壁偏转或没有明显干扰。
76.作为圆柱形的替代,通孔54可以具有圆锥形或仍根据需要选择的一些其他形状,特别是用于限制其内部的多次反射。
77.孔54和孔56可以内部涂覆有合适类型的非反射材料(例如,属于arc抗反射涂层的类别)。
78.此外,可以注意到,外壳50、51以及因此反射器10、20相对于彼此垂直交错,即相对于与表面32a和33a正交的轴z交错。以此方式,如图3示意性所示,反射器10、20的反射表面并不直接面对彼此(即,它们不沿平行于轴线z的同一轴线对齐),而是以一种位置布置,使得第一反射器10可以通过孔54接收入射光束b1(具有一定的接收角度,例如45
°
),并且可以将光束b1偏转向第二反射器20(反射光束b2);进而,第二反射器20可将接收的光束b2朝向模块30的输出孔56偏转,以产生光束b3a或b3b。如图3所示,在这种情况下,第二反射器20是振荡型的,并且通过振荡,可以改变光束射向输出孔56的角度,从而产生具有所需角度或方向的光束b3a、b3b。
79.此外,图3示出了光束b1的发生器91(例如激光器、或辐射或光束的一些其他光源)和发射的辐射或光束b3a-b3b的检测器94。检测器94的类型根据具体应用而变化,并且在物体的3d检测的情况下可能不存在。
80.如所预期的,在支撑部32、33之间存在间隙31a。支撑部32、33可以耦接在一起,使得间隙31a将相对于外部环境闭合(使得间隙31a可以被液体或气态流体填充或设置在真空条件下,以改善两个反射镜的动态控制并提高系统在其使用寿命期间的可靠性,这要归功于消除与反射镜接触的空气)。可替代地,支撑部32、33可以耦接在一起,使得间隙31a将与外部流体连通,从而能够接收存在于外部环境中的(液体或气体)流体,例如,用于通过分析
流体与由反射器10、20反射的光束的相互作用来对所述流体进行分析。
81.可替代地,间隙31a可以填充有固体材料,例如塑料树脂或凝胶,该固体材料对于在模块30的输入处接收并在其输出处传输的光束是透明的。
82.框架31的支撑部32、33具有大致多边形的形状(在平面xy中的俯视图中);在图中所示的示例中,支撑部32、33具有矩形形状。
83.在所示的实施例中,连接区域39'包括两个连接臂或元件60'、61',其具有分别连接至第一和第二支撑部32、33的相应第一端,以及连接在一起并连接至部分64的相应第二端。以此方式,每个连接臂60'、61'形成将第一和第二支撑部32、33连接至部分64的弯曲区域。
84.此外,连接区域39”还包括两个连接臂或元件60”、61”,其具有分别连接至第一支撑部和第二支撑部32、33(在其与连接臂60'、61'相对的一侧)的相应第一端(以可释放或不可释放的方式,如前所述),以及连接在一起的相应第二端。以此方式,每个连接臂60”、61”形成将第一和第二支撑部32、33结合在一起的另一弯曲区域。
85.从图2a中可以注意到,电连接结构37、38在模块30的相对面上、在支撑部32、33上、沿着连接臂60'、61'以及在部分64上延伸。特别地,部分64适于容纳连接器68、69,这些连接器适于形成模块30与一系统之间的连接接口,模块30将被插入该系统中或模块30将与该系统一起使用。每个连接器68、69通过集成或存在于电连接结构37、38中的相应电连接线电连接至相应反射器10、20,特别是用于在使用期间控制相应反射器10、20振荡。这些连接器68、69的类型、形状和技术特征不构成本发明的主题,因此不再进一步描述。
86.可以注意到,包括第一和第二支撑部32、33、连接臂60、61和部分64的框架31的生产可以根据任何合适的技术进行。
87.例如,框架31可以通过将第一和第二支撑部32、33、连接臂60、61和部分64(这些元件中的每一个都根据任何合适的技术,例如3d打印、成型、压铸等而获得)焊接或粘合或以某种其他方式固定在一起而获得。
88.可替代地,框架31可以通过例如使用金属材料的压铸工艺将第一和第二支撑部32、33、连接臂60、61和部分64制成单件而获得。
89.可替代地,框架31可通过已知的机加工工艺获得:从一块实心材料开始,并通过逐渐去除材料对其进行适当建模,直到获得所需的最终形状。
90.可替代地,框架31可通过例如使用塑料或聚合材料的模制工艺将第一和第二支撑部32、33、连接臂60、61和部分64制成单件而获得。
91.可替代地,框架31可以通过使用3d打印将第一和第二支撑部32、33、连接臂60、61和部分64制成单件来获得。可以注意到,当前可用的3d打印技术能够通过打印相应的材料来制造框架31和适于将反射器10、20连接至连接器68、69的电连接。因此,在这种情况下,没有必要使用具有适于将管芯35、36连接至连接器68、69的电连接或电线的挠性或刚挠印刷电路。
92.参考图2b,可选地存在对准元件70,这里以小柱或销的形式示出,它们从框架31沿着第一和第二支撑部32、33、连接臂60、60、和部分64中的一个或多个突出;每个电连接结构37、38具有对准孔(未示出),被配置为耦接至相应的对准元件70。这有利于电连接结构37、38和框架31之间的耦接步骤,特别是在管芯35、36和外壳50、51之间的对准。
93.图4是承载第一管芯35的电连接结构37的示意图。电连接结构37具有彼此相对的第一面37a和第二面37b。电连接结构37例如为fccl(挠性覆铜板)型刚挠板,有四层(亦称为4l),即具有可用于如前所述的电连接的四层金属层。可替代地,也可以根据需要使用具有双金属层(2l)的fccl型刚挠板。很明显,这些只是两个可能的非限制性示例,并且可以使用其他类型的挠性或刚挠板或基板。
94.参考图4,所表示的电连接结构37是刚挠型的;即,它包括刚性部37',刚性部37'的刚度大于挠性部37”的刚度,该挠性部与刚性区域37'相邻并作为刚性区域37'的延长部分延伸。在已预先布置电连接结构37之后,下一步骤是在挠性部37”的端部处、在面37b上形成(例如,通过胶合)元件80。元件80例如由金属、例如铜或铝,或其他材料、例如bt/fr4或塑料材料制成,厚度介于200至300微米之间,具有局部增加挠性部37”刚度的功能以利于其处理。在没有遇到操作困难的情况下,可以省略此步骤。
95.然后,连接器68在挠性部37”处并且特别是在元件80处(如已所述,在与容纳元件80的面37b相对的面37a上)耦接(例如,焊接、胶合或以其他方式固定)至电连接结构37的面37a。
96.然后,管芯35在面37b上耦接(例如,以某种其他方式胶合或固定)到刚性部37'。形成电连接线82以将用于控制管芯35的焊盘连接至存在于电连接结构37上的电连接,从而提供用于控制反射器10的电连接。电连接线82涂覆有保护材料84,例如环氧基树脂或硅树脂基树脂。电连接结构37的面37b是直接面对第一支撑部32布置的面。
97.在电连接结构38上进行类似的操作(就其本身显而易见而言,未详细描述)用于耦接连接器69和电连接结构38的管芯36。
98.根据一个实施例,输入孔54和/或输出孔56可以可选地包括相应的透镜,分别进入或离开模块30的光束通过该透镜。例如,该透镜在孔54的情况下具有准直入射光束的功能;在输出孔56的情况下,校正发散度,根据不同的应用引起准直或增加出射光束的发散度。
99.根据本公开描述的模块30可以被用在飞行时间装置/摄影机中以进行3d检测,例如用于智能手机上的应用,例如面部识别。在这种情况下,由发射器朝向输入孔54产生直接或正弦短光闪光;进入模块30的光束被反射器10、20适当地反射并且在输出处通过孔56发射;所述发射光束撞击物体并被反射回来,再次通过孔56进入模块30,并且沿着反向反射路径,通过孔54离开(接收光束)。此示例不适于接收器与发射器分离的应用。接收到的光束随后被检测器捕获以进行分析。光束从发射器到物体并返回到检测器的传播时间由处理硬件(例如,处理器或处理单元)计算。测量的坐标然后用于生成对象的3d图像。
100.模块30还可被用在用于3d检测的结构光应用的上下文中。在这种情况下,检测器优选地是由像素阵列形成的cmos传感器,适于检测来自入射光束的图像。处理算法可用于从检测到的图像中获取信息以进行3d检测,例如面部识别。
101.其他可能的应用包括模块30在lidar系统或设备中的使用,lidar系统或设备可用于例如车辆的自主驾驶的应用中。
102.其他应用包括在用于图像投影的系统或应用(例如,微型投影仪)中使用模块30。
103.图5是系统90的示意图,特别是3d扫描设备或3d扫描仪,其包括至少一个模块30,可操作地耦接至处理单元92,该处理单元92被配置用于基于结构光方法、飞行时间方法等进行3d检测。例如,在飞行时间方法的情况下,处理单元92被配置为计算在对应于发射器产
生第一辐射的第一时刻和对应于发射器产生第二辐射的第二时刻之间的传播时间(即光束从发射器到物体并返回到检测器的传播时间)。不管使用何种方法,处理单元92都可以重建对象的3d图像。
104.从对本说明书特征的检查来看,由此产生的优点是显而易见的。
105.通过在封装结构级别将所有组件集成到一个模块中,解决方案的体积得以减少和优化。
106.此外,可以提供模块30,以安装在电子设备或系统中,模块已经配备有布置在期望的相互角度和空间位置中的两个微镜。通过这种方式,贴片机可以自动进行安装,从而降低组装成本和错误定位的风险,从而提高产量。
107.使用自动机器在电子设备中组装镜子组件,无需人工干预,可降低成本并提高生产率。
108.最后,很明显,可以对这里所描述和图示的内容进行修改和变化,而不脱离所附权利要求中定义的本公开的范围。
109.虽然已经关于有限数量的实施例描述了本公开,但是受益于本公开的本领域技术人员将理解,可以设想不脱离本文公开的本公开的范围的其他实施例。因此,本公开的范围应仅由所附权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1