一种双面纳米压印设备的制作方法
1.本发明涉及纳米压印技术领域,特别涉及一种双面纳米压印设备
背景技术:
2.纳米压印技术,是一种新型的微纳加工技术,通过纳米压印胶,将模板 上的微纳结构转移到代加工基板上,为保证压印精度和对位精度,需要在基 片上进行双面压印,需要对压印设备做进一步改进。
技术实现要素:
3.本发明的目的在于克服以上技术缺陷,提出一种双面纳米压印设备。
4.本发明为实现其技术目的所采取的技术方案是:一种双面纳米压印设备, 包括位于设备腔体内的传送单元和移动压印单元,以及基片、工作模具,所 述传送单元包括固定在设备腔体内部的上固定板,所述上固定板下表面固定 有基片吸附板,工作模具吸附板和紫外固化单元;
5.所述传送单元还包括用于移动压印单元移动的固定板、导轨、移动块、 电机、导轨固定块,固定板位于移动块上,所述移动块套接在所述导轨上, 所述固定板能够随着移动块在导轨上左右移动;
6.所述传送单元还包括用于确定移动压印单元位置的限位感应块和红外距 离探测器;
7.所述移动压印单元包括工作模具吸附板,所述工作模具吸附板中间设有 透明区,所述工作模具吸附板的上表面设有方形真空槽,所述真空槽的槽内 设有真空孔,方形真空槽外侧设有工作模具定位槽;
8.所述工作模具吸附板通过连接块与升降柱连接,电机驱动升降柱伸长或 收缩带动工作模具吸附板升起或降下;所述电机下方设有位移平台,用于工 作模具吸附板的前后移动,所述位移平台下方设有旋转平台,用于工作模具 吸附板的旋转。
9.优选的、还包括基片吸附板,所述基片吸附板位于所述上固定板的下表 面,所述基片吸附板用于吸附固定基片,基片吸附板的下表面设有圆形的真 空槽,真空槽槽内设有真空孔。
10.优选的、还包括工作模具吸附板,所述工作模具吸附板位于所述上固定 板的下表面,工作模具吸附板的下表面设有方形真空槽,方形真空槽槽内设 有真空孔,方形真空槽外侧设有工作模具定位槽。
11.优选的、还包括对准单元,所述对准单元位于所述上固定板的上方,包 括用于对准装置左右移动的移动块、限位块、导轨、固定支撑杆、对准装置;
12.所述对准单元能够透过透明的基片吸附板、工作模具吸附板、基片和工 作模具观察对位标记的相对位置,将图像实时显示在液晶触摸屏上,根据对 位标记的相对位置调整移动压印单元的相对位置。
13.优选的、还包括紫外固化单元,所述紫外固化单元位于所述上固定板的 下表面,所述紫外固化单元发出紫外光穿过工作模具和基片,固化纳米压印 胶体。
14.优选的、所述基片上设有对位标记,所述工作模具包括第一工作模具、 第二工作模具,所述第一工作模具位于所述移动压印单元上表面,所述第二 工作模具位于工作模具吸附板的下表面,所述工作模具上设有与对位标记相 对应的对位标记。
15.本发明的有益效果是:移动块套接在导轨上,使得固定板能够随着移动 块在导轨上左右移动,从而带动基片在不同工位上移动;基片吸附板、工作 模具吸附板,实现对基片和工作模具的吸附;基片表面的胶体通过与第一工 作模具和第二工作模具的接触,推动中心的胶体由中心向外扩展,填充纳米 结构,实现双面纳米压印。
附图说明
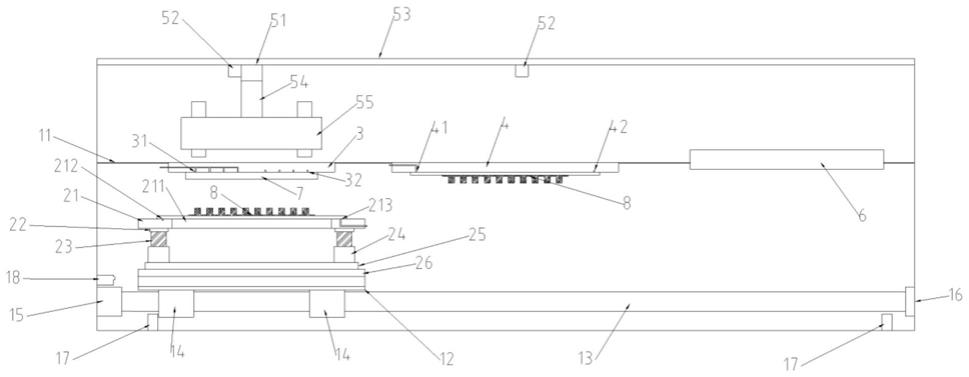
16.图1本发明设备的结构示意图;
17.图2本发明设备移动压印单元2的俯视图;
18.图3本发明设备移动压印单元2的侧视图;
19.图4本发明设备的基片吸附板3的下表面结构示意图;
20.图5本发明设备基片吸附板3的侧视图;
21.图6本发明设备工作模具吸附板4的下表面结构示意图;
22.图7本发明设备工作模具吸附板4的侧视图;
23.图8本发明设备压印过程的示意图;
24.图9本发明设备双面压印的基片结构示意图;
25.图10-图14本发明设备双面压印过程的结构示意图。
26.图中标记为:
27.1、传送单元;11、上固定板;12、固定板;13、导轨;14、移动块;
28.15、电机;16、导轨固定块;17、限位感应块;18、红外距离探测器;
29.2、移动压印单元;21、工作模具吸附板;211、透明区;
30.212、方形真空槽;213、真空孔;214、工作模具定位槽;22、连接块;
31.23、升降柱;24;电机;25、位移平台;26、旋转平台;
32.3、基片吸附板;31、真空孔;32、真空槽;
33.4、工作模具吸附板;41、真空孔;42、方形真空槽;43、工作模具定位 槽;
34.5、对准单元;51、移动块;52、限位块;53、导轨;54、固定支撑杆; 55、对准装置;
35.6、紫外固化单元;7、基片;71、对位标记;
36.8、工作模具;81、第一工作模具;82、第二工作模具;83、对位标记。
具体实施方式
37.下面结合附图实施例,对本发明做进一步说明。
38.实施例一
39.如图1-14所示:
40.一种双面纳米压印设备,包括:
41.传送单元1
42.传送单元1位于设备腔体内。传送单元1包括固定在设备腔体内部的上 固定板11上固定板11下表面固定有基片吸附板3,工作模具吸附板4和紫外 固化单元6。
43.传送单元还包括用于移动压印单元移动的固定板12,导轨13,移动块14, 电机15,导轨固定块16。固定板12位于移动块14上,随移动块14在导轨 13上左右移动。
44.传送单元还包括用于确定移动压印单元位置的限位感应块17和红外距离 探测器18。
45.移动压印单元2
46.移动压印单元2用于吸附固定工作模具,并带动工作模具移动完成压印 和对准动作。移动压印单元2包括工作模具吸附板21,工作模具吸附板21中 间设有透明区211,工作模具吸附板21的上表面设有方形真空槽212,真空 槽槽内设有真空孔213,方形真空槽212外侧设有工作模具定位槽214。
47.工作模具吸附板21通过连接块22与升降柱23连接,电机24使升降柱 13伸长或收缩带动工作模具吸附板21升起或降下。电机24下方设有位移平 台25用于工作模具吸附板21的前后移动,位移平台下方设有旋转平台26用 于工作模具吸附板21的旋转;
48.基片吸附板3
49.基片吸附板3位于所述上固定板11的下表面。基片吸附板3的材质可以 是亚克力等透明材质。基片吸附板3用于吸附固定基片7。基片吸附板3的下 表面设有圆形的真空槽32,真空槽32槽内设有真空孔31。
50.工作模具吸附板4
51.工作模具吸附板4位于所述上固定板11的下表面。工作模具吸附板的材 质可以是亚克力等透明材质。工作模具吸附板4的下表面设有方形真空槽42, 方形真空槽42槽内设有真空孔41。方形真空槽42外侧设有工作模具定位槽 43。
52.对准单元5
53.对准单元位于所述上固定板11的上方。对准单元5可透过透明的基片吸 附板3,工作模具吸附板4,基片7和工作模具8观察对位标记的相对位置, 将图像实时显示在液晶触摸屏上,根据对位标记的相对位置调整移动压印单 元2的相对位置。对位单元5包括用于对准装置55左右移动的移动块51,限 位块52,导轨53,固定支撑杆54,对准装置55;
54.紫外固化单元6
55.紫外固化单元6位于所述上固定板11的下表面。双面压印完成后,移动 压印单元2带动压印完毕的材料移动到紫外固化单元6的下方,紫外固化单 元6发出紫外光穿过工作模具8和基片7固化纳米压印胶体。
56.基片7,
57.基片7上设有对位标记71。
58.工作模具8,
59.工作模具8设有两个。第一工作模具81位于移动压印单元2上表面,第 二工作模具82位于工作模具吸附板4的下表面。工作模具8上设有与对位标 记71相对应的对位标记83。
60.本发明工作原理及工作过程如下:
61.如图8-图14所示:
62.双面压印过程:
63.s1复位:
64.设备个单元回到原点位置,移动压印单元2移动到基片吸附板3下方,对 位单元5移动到基片吸附板3的上方。
65.s2上料:
66.第一工作模具81:
67.第一工作模具81需要固定在移动压印单元2上表面,首先将第一工作模 具81的四角与工作模具定位槽214冲齐,打开方形真空槽212,在真空槽内 产生负压固定第一工作模具81,第一工作模具81的纳米结构面朝向基片吸附 板3。
68.第二工作模具82:
69.第二工作模具82需固定在工作模具吸附板4的下表面,首先将第二工作 模具82结构面朝下放置,然后将第二工作模具82的四角与工作模具定位槽 43冲齐,打开方形真空槽42的真空,在槽内形成负压固定第二工作模具82, 第二工作模具82的纳米结构面朝向移动压印单元2。
70.s3点胶:
71.上料完毕后,准备工作完成,开始点胶。第一次点胶首先在位于移动压印 单元2上表面的第一工作模具81的中心处点胶(点胶装置未画出)。
72.s4第一次对位:
73.点胶完成后开始对位动作。电机24带动升降柱23伸长,工作模 具吸附板21向上移动到某一位置,此位置第一工作模具81中心的胶 体未接触基片7。对准装置55观察对位标记71和83的相对位置, 将信息反馈并显示在液晶触摸屏上,根据对位标记的相对位置,通过 传送单元1,位移平台25和旋转平台26调整第一工作模具的位置, 使第一工作模具的对位标记83和基片7的对位标记71在竖直方向上 对齐。
74.s5第一次压印:
75.对准动作完成后,移动压印单元2仅保存上下移动,其他方位上不再移动。 电机24带动升降柱23继续伸长,工作模具吸附板21向上移动,慢慢与基片 7接触,推动中心的胶体由中心向外扩展,填充纳米结构。
76.s6复位:
77.压印动作完成后,关闭圆形真空槽32,释放基片7。移动压印单元2回到 原点位置。
78.s7第二次点胶:
79.移动压印单元吸附固定第一工作模具81和基片7,并带动回到原点位置。 第二次点胶将胶体滴加在基片7上表面的中心处,完成点胶动作(点胶装置 未画出)。
80.s8第二次对位:
81.电机15带动移动块14向右运动至工作模具吸附板4的正下方,红外距离 探测器18实时监测移动压印单元2的位置。
82.移动块51带动对准装置55向右移动至工作模具吸附板4的正上方。
83.电机24带动升降柱23伸长,工作模具吸附板21向上移动到某 一位置,此位置第二工作模具82中心的胶体未接触基片7表面的胶 体。对准装置55观察对位标记71和83的相对位置,将信息反馈并 显示在液晶触摸屏上,根据对位标记的相对位置,通过传送单元1, 位移平台25和旋转平台26调整第一工作模具的位置,使第一工作模 具、第二工作模具的对位
标记83和基片7的对位标记71在竖直方向 上对齐。
84.s9第二次压印:
85.对准动作完成后,移动压印单元2仅保存上下移动,其他方位上不再移动。 电机24带动升降柱23继续伸长,工作模具吸附板21向上移动,基片7表面 的胶体慢慢与第二工作模具82接触,推动中心的胶体由中心向外扩展,填充 纳米结构。
86.s10移动:
87.压印完成后,关闭方形真空槽42,释放第二工作模具82。电机15带动移 动块14向右运动,红外距离探测器18实时监测移动压印单元2的位置。
88.s11紫外固化:
89.当移动压印单元2移动至紫外固化单元6的正下方时,开始固化纳米压印 胶。紫外固化单元6发出紫外光透过透明的工作模具8和基片7固化纳米压 印胶。
90.s12分离:
91.关闭方形真空槽212,释放第二工作模具81,将压印在一起的基片7,第 一工作模具81和第二工作模具82取下,手动分离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1