光学元件驱动机构及光学系统的制作方法
1.本公开涉及一种光学元件驱动机构,特别是涉及一种驱使一光学元件运动的光学元件驱动机构。
背景技术:
2.随着三维物体感测科技的快速进步,先进驾驶辅助系统(advanced driver assistance systems,adas)已逐渐被应用于一般车辆中。举例而言,前述先进驾驶辅助系统(adas)可具备即时三维物体侦测(real-time 3d object detection)、大尺度三维车辆侦测(large-scale 3d vehicle detection)甚至三维物体辨识(3d object recognition)等功能。
3.传统的三维物体感测技术大多是采用光达感测(light detection and ranging,lidar)、红外线感测或超音波感测,然而如何能提升传统三维物体感测装置的效能并达成其驱动机构的微型化始成为一重要的挑战。
技术实现要素:
4.本公开的一实施例提供一种光学元件驱动机构,具有一主轴,包括一活动部、一固定部、一驱动组件、以及一第一连接组件。活动部连接一光学元件,并且相对于固定部可运动,驱动组件驱动活动部相对固定部运动。活动部经由第一连接组件活动地连接固定部。
5.根据本公开一些实施例,光学元件驱动机构还包括一电路构件,配置以将光学元件电性连接至一外部电路。活动部包括一承载座、一框架、以及一第二连接组件。承载座连接光学元件。承载座相对框架可运动。承载座经由第二连接组件活动地连接框架。光学元件包括一第一透镜以及一反射元件,反射元件设置于第一透镜与承载座之间。承载座具有金属材质。第二连接组件具有弹性材质。承载座相对于框架具有一第一共振频率。活动部相对于固定部具有一第二共振频率。第一共振频率与第二共振频率不同。活动部仅经由该第一连接组件连接固定部。
6.根据本公开一些实施例,第一连接组件具有长条形结构,沿着一第一方向延伸。第二连接组件具有长条形结构,沿着一第二方向延伸。第一方向与第二方向不平行。第一方向与第二方向互相垂直。第一连接组件在第一方向的一最大尺寸与第二连接组件在第二方向的一最大尺寸不同。第一连接组件在第一方向的最大尺寸大于第二连接组件在第二方向的最大尺寸。第一连接组件在第二方向的一最大尺寸与第二连接组件在第一方向的一最大尺寸不同,更详细地说,第一连接组件在第二方向的最大尺寸小于第二连接组件在第一方向的最大尺寸。沿着平行于主轴的一方向观察时,固定部具有多边形结构。沿着平行于主轴的方向观察时,固定部更具有沿着第一方向延伸的一第一侧边以及沿着第二方向延伸的一第二侧边。沿着平行于主轴的方向观察时,第一侧边的长度大于第二侧边的长度。
7.根据本公开一些实施例,驱动组件包括一第一磁性单元、一第二磁性单元、以及一线圈。第一磁性单元设置于靠近框架的一外周边。第二磁性单元设置相对于第一磁性单元。
线圈设置于框架。沿着平行于主轴的方向观察时,第一磁性单元以及第二磁性单元具有一弧形结构。其中沿着平行于主轴的方向观察时,第一磁性单元、第二磁性单元与线圈不重叠。线圈配置以接收一控制组件所输出的一第一驱动信号以及一第二驱动信号。当线圈接收第一驱动信号时,驱动组件驱动活动部相对固定部在一第一维度上运动。当线圈接收第二驱动信号时,驱动组件驱动承载座相对框架在一第二维度上运动。第一维度与第二维度不同。在第一维度上运动为以一第一转轴为轴心的转动。第一转轴与第一方向平行。在第二维度上运动为以一第二转轴为轴心的转动。第二转轴与第二方向平行。第二驱动信号的频率与第一共振频率相同,第一驱动信号的频率与第二共振频率相同。沿着平行于主轴的方向观察时,第一磁性单元、第二磁性单元与主轴形成一第一连线,第一连线与第一方向以及第二方向皆不平行。第一驱动信号包括一行进信号以及一回归信号,其中当线圈接收到行进信号时,驱动组件驱动活动部相对固定部以第一转轴为轴心进行一第一旋转。当线圈接收到回归信号时,驱动组件驱动活动部相对固定部以第一转轴为轴心进行一第二旋转。第一旋转的角速度的绝对值与第二旋转的角速度的绝对值不同。第一旋转的角速度的绝对值小于第二旋转的角速度的绝对值。驱动组件配置以同时驱动活动部相对固定部在第一维度运动以及承载座相对框架在第二维度运动。当驱动组件驱动活动部相对固定部在第一维度运动以及承载座相对框架在第二维度运动时,控制组件同时输入第一驱动信号以及第二驱动信号至线圈。
8.根据本公开一些实施例,光学元件驱动机构还包括发射元件以及一接收元件。发射元件发射一光线。接收元件接收光线入射至一物体后的一反射光,换句话说,接收元件接收入射至一物体后反射的该光线。当驱动组件驱动承载座相对框架运动时,光线的一行进方向同时受到影响而改变。发射元件以一脉冲波的形式发射光线。当驱动组件驱动承载座相对框架在第二维度上于一周期内运动时,发射元件以至少两个以上的频率发射光线。光学元件配置以改变光线的行进方向。
9.根据本公开一些实施例,第一透镜包括一第一介质以及一第二介质。第一介质的折射率不同于第二介质的折射率。第一介质的折射率小于第二介质的折射率。第一介质与第二介质之间具有一第一界面。电路构件驱动第一界面变形。第二介质较第一介质更接近反射元件。沿着平行于主轴的方向观察时,第一介质与第二介质至少部分重叠。经由电路构件施加一电压到光学元件,以一化学性方式改变第一界面的一曲率。设置一压电机构连接光学元件,借由压电机构以一物理性方式改变第一界面的曲率。经由化学性方式或是物理性方式两者中的至少一种方式控制曲率,进而控制经由光学元件出射的光线的一出射角度。
10.根据本公开一些实施例,其中第一透镜还包括一第三介质,第三介质较第一介质更接近反射元件。第二介质与第三介质之间具有一第二界面。第一界面与第二界面不平行。第一介质与第三介质之间具有一第三界面,第二界面与第三界面不平行。沿着平行于主轴的方向观察时,第一介质与第三介质至少部分重叠。沿着垂直于主轴的一方向观察时,第二介质与第三介质至少部分重叠。
11.根据本公开一些实施例,借由驱动组件控制活动部相对固定部在第一维度运动,进而控制由光学元件反射的光线形成的一扫描范围。借由驱动组件控制承载座相对框架在第二维度运动,进而控制扫描范围。控制出射角度以进而控制扫描范围。设置使第一介质的
折射率小于第二介质的折射率,并且第二介质的折射率小于第三介质的折射率,使得出射角度放大,进而扩大扫描范围。其中扫描范围具有一矩形形状,控制第二维度运动以控制扫描范围的一长边的大小,控制第一维度运动以控制扫描范围的一短边的大小。光线的一截面具有一椭圆形状,且椭圆形状的一长轴与扫描范围的长边垂直。
12.根据本公开一些实施例,光学元件驱动机构还包括一第一阻尼元件以及一第二阻尼元件,第一阻尼元件配置以抑止活动部相对固定部的异常运动。第二阻尼元件配置以抑止承载座相对框架的异常运动。第一阻尼元件具有一树脂材质。第一阻尼元件直接接触第一连接组件。第一阻尼元件直接接触固定部。第一阻尼元件直接接触活动部。第二阻尼元件具有一树脂材质。第二阻尼元件直接接触第二连接组件。第二阻尼元件直接接触承载座。第二阻尼元件直接接触框架。
13.根据本公开一些实施例,一种光学系统包括多个光学元件驱动机构,多个光学元件驱动机构沿着一第三方向排列。多个光学元件驱动机构分别输出一第一信息、一第二信息以及一第三信息。光学系统的一运算单元将第一信息、第二信息以及第三信息整合为一第四信息。第四信息的范围大于第一信息、第二信息以及第三信息。
附图说明
14.本公开可借由之后的详细说明并配合图示而得到清楚的了解。要强调的是,按照业界的标准做法,各种特征并没有按比例绘制,并且仅用于说明的目的。事实上,为了能够清楚的说明,因此各种特征的尺寸可能会任意地放大或者缩小。
15.图1为本公开一实施例的一光学感测系统的示意图。
16.图2为图1中的一光学模块改变一光线行进方向的示意图。
17.图3为当一第一光学元件绕一第二轴旋转时,光线被一第二光学元件反射到一物体表面的示意图。
18.图4为第二光学元件于一第一角度范围内绕一第一轴连续地旋转,且第一光学元件于一第二角度范围内以间歇步进的方式绕第二轴旋转的示意图。
19.图5为本公开另一实施例的一光学元件驱动机构的部分结构的立体图。
20.图6为本公开另一实施例的光学元件驱动机构的部分结构的俯视图。
21.图7为本公开另一实施例的光学元件驱动机构的部分结构的仰视图。
22.图8为本公开另一实施例的光学元件的侧视图。
23.图9为本公开另一实施例的光线的一出射角度随一界面角度改变的示意图。
24.图10为本公开另一实施例的光线在一光学元件行进的示意图。
25.其中,附图标记说明如下:
26.2-1:光学元件驱动机构
27.2-10:光学元件
28.2-11:第一透镜
29.2-12:反射元件
30.2-100:固定部
31.2-101:第一侧边
32.2-102:第二侧边
33.2-110:基座
34.2-200:活动部
35.2-210:承载座
36.2-220:框架
37.2-300:驱动组件
38.2-310:第一磁性单元
39.2-320:第二磁性单元
40.2-330:线圈
41.2-400:第一连接组件
42.2-500:第二连接组件
43.2-600:电路构件
44.2-700:位置感测元件
45.2-1000:光学感测系统
46.2-a1:第一轴
47.2-a2:第二轴
48.2-c,2-c0,2-c1:曲率
49.2-c1:第一转轴
50.2-c2:第二转轴
51.2-d1:第一方向
52.2-d2:第二方向
53.2-fl:聚焦镜
54.2-i1:第一界面
55.2-i2:第二界面
56.2-i3:第三界面
57.2-ip:初始位置
58.2-l:第一连线
59.2-l1:光线
60.2-m:主轴
61.2-n1:第一介质
62.2-n2:第二介质
63.2-o:物体
64.2-pr:第一光学元件
65.2-r1:第二光学元件
66.2-ra1:第一角度范围
67.2-ra2:第二角度范围
68.2-rx:接收元件
69.2-s1:固定部
70.2-s2:活动部/承载座
71.2-s3:连接部
72.2-sm:光学模块
73.2-sp1,2-sp2,2-sp3:步进角度
74.2-tx:发射元件
75.2-θc:界面角度
76.2-θi:入射角度
77.2-θe:出射角度
具体实施方式
78.为了让本公开的目的、特征、及优点能更明显易懂,下文特举实施例,并配合所附图示做详细说明。其中,实施例中的各元件的配置是为说明之用,并非用以限制本公开。且实施例中图式标号的部分重复,是为了简化说明,并非意指不同实施例之间的关联性。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附加图式的方向。因此,使用的方向用语是用来说明并非用来限制本公开。
79.此外,实施例中可能使用相对性的用语,例如“较低”或“底部”及“较高”或“顶部”,以描述图示的一个元件对于另一元件的相对关系。能理解的是,如果将图示的装置翻转使其上下颠倒,则所叙述在“较低”侧的元件将会成为在“较高”侧的元件。
80.在此,“约”、“大约”的用语通常表示在一给定值或范围的20%之内,优选是10%之内,且更优选是5%之内。在此给定的数量为大约的数量,意即在没有特定说明的情况下,仍可隐含“约”、“大约”的含义。
81.请参考图1以及图2,图1为本公开一实施例的一光学感测系统2-1000的示意图。图2为图1中的一光学模块2-sm改变一光线2-l1行进方向的示意图。本实施例的光学感测系统2-1000主要包括一发射元件2-tx、一接收元件2-rx、一光学模块2-sm以及一聚焦镜2-fl(focusing lens),如图2所示,光学模块2-sm包括一第一光学元件2-pr以及一第二光学元件2-r1,第一光学元件2-pr以及第二光学元件2-r1可分别被驱动而于特定角度范围内分别绕一第一轴2-a1以及一第二轴2-a2旋转。
82.当前述发射元件2-tx所发出的一光线2-l1沿一初始方向到达光学模块2-sm中的第一光学元件2-pr,然后光线2-l1会受到第一光学元件2-pr的引导而沿一入射方向传递至第二光学元件2-r1。接着,光线2-l1会被第二光学元件2-r1反射并沿一出射方向离开而到达前述物体2-o表面,其中第一轴2-a1是垂直于前述入射方向以及出射方向,并且第二轴2-a2则是垂直于前述初始方向以及入射方向。接着,被物体2-o反射后的光线2-l1会经过聚焦镜2-fl而到达接收元件2-rx,前述接收元件2-rx可将接收到的光信号转换成为电信号并传送到一处理器(未图示),从而可得知物体2-o的三度空间表面(3d surface)及深度信息。
83.在一些实施例中,第一光学元件2-pr可以是一棱镜(prism)、第二光学元件2-r1可以是一反射镜。第二光学元件2-r1是设置于一弹性元件2-s上,在一些实施例中,弹性元件2-s可为一簧片,具有两个固定部2-s1、一活动部2-s2、以及两个连接部2-s3。活动部2-200为平板状的一承载座2-s2,可承载第二光学元件2-r1,连接部2-s3连接固定部2-s1以及活动部2-s2,使得活动部2-s2可相对固定部2-s1运动。
84.在一些实施例中,第二光学元件2-r1可以借由开回路控制(open-loop control)的方式而在一第一角度范围内绕第一轴2-a1旋转,此外第一光学元件2-pr则可通过闭回路
控制(closed-loop control)的方式而在一第二角度范围内绕第二轴2-a2旋转。
85.在一些实施例中,承载座2-s2具有一共振频率,借由施加一交流电信号,并使交流电信号的频率对应于前述共振频率,可驱动承载座2-s2绕第一轴2-a1往复地旋转,此外第一光学元件2-pr则可借由音圈马达(voice coil motor,vcm)驱动而绕第二轴2-a2旋转。
86.接着请一并参考图3以及图4,图3表示当第一光学元件2-pr绕第二轴2-a2旋转时,光线2-l1被第二光学元件2-r1反射到物体2-o表面的示意图,图4表示第二光学元件2-r1于一第一角度范围2-ra1内绕第一轴2-a1连续地旋转,且第一光学元件2-pr于一第二角度范围2-ra2内以间歇步进(stepwise manner)的方式绕第二轴2-a2旋转的示意图。
87.如图3所示,当第一光学元件2-pr绕第二轴2-a2旋转时,可使光线2-l1移动经过一扇形(fan-shaped)区域,由于此时第二光学元件2-r1也会绕该第一轴2-a1往复地旋转,因此可利用光线2-l1在物体2-o表面的一特定区域范围内进行深度感测或3d扫描。
88.从图4可以看出,本实施例中的弹性元件2-s的承载座2-s2以及第二光学元件2-r1主要是以连续运动的方式相对于固定部在第一角度范围2-ra1内绕第一轴2-a1往复地旋转,而第一光学元件2-pr则是以间歇步进的方式相对于固定部在第二角度范围2-ra2内绕第二轴2-a2旋转。
89.需特别说明的是,当光线2-l1从一初始位置2-ip沿一预设方向绕前述第二轴2-a2旋转一步进角度2-sp1(step angle)后,第一光学元件2-pr会暂时停止绕该第二轴2-a2旋转,接着等待弹性元件2-s的承载座2-s2以及第二光学元件2-r1完全移动经过第一角度范围2-ra1后,第一光学元件2-pr才会再沿前述预设方向继续绕第二轴2-a2旋转另一步进角度2-sp2。
90.同理,当第一光学元件2-pr绕第二轴2-a2旋转步进角度2-sp2后,第一光学元件2-pr同样会暂时停止绕第二轴2-a2旋转,接着等待弹性元件2-s的承载座2-s2以及第二光学元件2-r1完全移动经过该第一角度范围2-ra1后,才会在再沿前述预设方向绕第二轴2-a2旋转另一步进角度2-sp3,以此类推。经由前述说明应可理解,随着第二光学元件2-r1和第一光学元件2-pr分别绕第一轴2-a1以及第二轴2-a2旋转,即可使光线2-l1在物体2-o表面的一特定区域范围内进行深度感测或3d扫描。
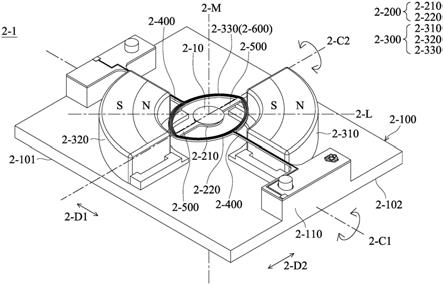
91.然而,光学感测系统2-1000不限于前述的配置,例如接着请参考图5至图7,其中图5为本公开另一实施例的光学元件驱动机构2-1的部分结构的立体图。图6为本公开另一实施例的光学元件驱动机构2-1的部分结构的俯视图。图7为本公开另一实施例的光学元件驱动机构2-1的部分结构的仰视图。在以下说明中,与前述实施例中具有相似功能的元件可能使用相同的标号。
92.相较于图1以及图2的实施例使用了两个光学元件(第一光学元件2-pr以及第二光学元件2-r1),本实施例仅借由一个光学元件而使光线2-l1在物体2-o表面的一特定区域范围内进行深度感测或3d扫描。如图5所示,光学元件驱动机构2-1具有一主轴2-m,包括一光学元件2-10、一固定部2-100、一活动部2-200、一驱动组件2-300、一第一连接组件2-400、一第二连接组件2-500、一电路构件2-600、以及一位置感测元件2-700。
93.在本实施例中,固定部2-100具有多边形结构,当沿着平行于主轴2-m的一方向观察时,固定部2-100为一矩形,具有沿着一第一方向2-d1延伸的一第一侧边2-101以及沿着一第二方向2-d2延伸的一第二侧边2-102,第一方向2-d1与第二方向2-d2不平行,更详细地
说,第一方向2-d1与第二方向2-d2互相垂直,并且第一方向2-d1、第二方向2-d2、以及主轴2-m互相垂直。第一侧边2-101的长度大于第二侧边2-102的长度。固定部2-100包括一基座2-110以及一外壳(未图示),基座2-110与外壳形成一容纳空间,以容纳活动部2-200,并使得外部的气体或液体无法进入此容纳空间。也就是说,可以防止活动部2-200相对于固定部2-100的运动受外部气体或液体干扰而被影响,进而影响扫描的品质。
94.活动部2-200经由第一连接组件2-400活动地连接固定部2-100,更详细地说,活动部2-200仅经由第一连接组件2-400连接固定部2-100。活动部2-200包括一承载座2-210以及一框架2-220,而承载座2-210经由第二连接组件2-500活动地连接框架2-220。承载座2-210具有金属材质,并且可承载光学元件2-10,光学元件2-10配置以改变光线2-l1的行进方向。
95.第一连接组件2-400以及第二连接组件2-500皆具有长条形结构,第一连接组件2-400沿着第一方向2-d1延伸,第二连接组件2-500沿着第二方向2-d2延伸。第一连接组件2-400在第一方向2-d1的一最大尺寸与第二连接组件2-500在第二方向的一最大尺寸不同,更详细地说,第一连接组件2-400在第一方向2-d1的最大尺寸大于第二连接组件2-500在第二方向2-d2的最大尺寸。此外,第一连接组件2-400在第二方向2-d2的一最大尺寸与第二连接组件2-500在第一方向的一最大尺寸不同,更详细地说,第一连接组件2-400在第二方向2-d2的最大尺寸小于第二连接组件2-500在第一方向2-d1的最大尺寸。
96.可以设置阻尼元件以抑制两个元件之间的异常运动,在一些实施例中,设置一第一阻尼元件(未图示)以抑止活动部2-200相对固定部2-100的异常运动,设置一第二阻尼元件(未图示)以抑止承载座2-210相对框架2-220的异常运动,第一阻尼元件以及第二阻尼元件可具有一树脂材质。第一阻尼元件可以直接接触第一连接组件2-400、固定部2-100、以及活动部2-200。第二阻尼元件可以直接接触第二连接组件2-500、承载座2-210、以及框架2-220。
97.在本实施例中,活动部2-200、第一连接组件2-400、以及第二连接组件2-500是由一体成形的一簧片构成,因此第一连接组件2-400以及第二连接组件2-500具有弹性材质。并且借由前述第一连接组件2-400以及第二连接组件2-500的长度以及粗细不同(第一连接组件2-400较长且较细、第二连接组件2-500较短且较粗),使得承载座2-210相对于框架2-220具有一第一共振频率,活动部2-200相对于固定部2-100具有一第二共振频率,第一共振频率与第二共振频率不同。因此可以借由一控制组件(未图示)输入相同频率的控制信号使其共振而驱动活动部2-200以及/或承载座2-210。在一些实施例中,第一共振频率高于第二共振频率,举例而言,前述第一共振频率约介于300hz到1000hz之间,第二共振频率介于约10hz到30hz之间,且第一共振频率可为第二共振频率的10倍以上。
98.但不限于此,活动部2-200、第一连接组件2-400、以及第二连接组件2-500也可以分别使用不同的元件连接而构成,例如在一些实施例中,第一连接组件2-400可以使用球状的轴承机构,设置于固定部2-100以及活动部2-200之间,使得活动部2-200可相对固定部2-100转动。
99.驱动组件2-300包括一第一磁性单元2-310、一第二磁性单元2-320、以及一线圈2-330。第一磁性单元2-310设置于靠近框架2-220的一外周边,第二磁性单元2-320设置相对于第一磁性单元2-310。线圈2-330设置于框架2-220,更详细地说,如图6所示,可以通过金
属油墨(metallic printing ink)或其他金属电路生成(circuit-on-metal)技术而将线圈2-330形成于框架2-220的顶侧以及底侧,并且,以上述技术所形成的线圈2-330也可以同时作为电路构件2-600,电性连接例如光学元件2-10至一外部电路,也可以连接至如图6所示的位置感测元件2-700(例如,霍尔感测元件),以得知活动部2-200相对固定部2-100的位置。沿着平行于主轴2-m的方向观察时,第一磁性单元2-310以及第二磁性单元2-320具有一弧形结构,分别以围绕框架2-220形状的方式朝主轴2-m弯曲,并且第一磁性单元2-310、第二磁性单元2-320与线圈2-330不重叠。
100.需特别说明的是,第一磁性单元2-310与第二磁性单元2-320的磁极方向相同,并且第一磁性单元2-310、第二磁性单元2-320与主轴2-m形成一第一连线2-l,此第一连线2-l与第一方向2-d1以及第二方向2-d2皆不平行,在一些实施例中,第一连线2-l与第一连接组件2-400沿着第一方向2-d1延伸而形成的夹角为45度,此时第一磁性单元2-310、第二磁性单元2-320与线圈2-330之间所产生的电磁驱动力较佳,但不限于此,可视需求而改变。
101.线圈2-330配置以接收控制组件所输出的一第一驱动信号以及一第二驱动信号。第一驱动信号以及第二驱动信号可以是具有不同波形以及频率的交流电信号。当线圈2-330接收第一驱动信号时,驱动组件2-300驱动活动部2-200相对固定部2-100在一第一维度上运动,当线圈接2-收第二驱动信号时,驱动组件2-300驱动承载座2-210相对框架2-220在一第二维度上运动。第一维度与第二维度不同。更详细地说,在第一维度上运动是指以一第一转轴2-c1为轴心的转动,在第二维度上运动是指以一第二转轴2-c2为轴心的转动,而第一转轴2-c1与第一方向2-d1平行、第二转轴2-c2与第二方向2-d2平行。
102.在本实施例中,第二驱动信号的频率与第一共振频率相同,因此与图1以及图2的实施例中驱动第二光学元件2-r1转动的方式类似,承载座2-210相对框架2-220在一角度范围以连续运动的方式绕第二转轴2-c2往复地旋转。
103.在一些实施例中,第一驱动信号的频率与第二共振频率相同。第一驱动信号包括一行进信号以及一回归信号,当线圈2-330接收到行进信号时,驱动组件2-300驱动活动部2-200相对固定部2-100以第一转轴2-c1为轴心进行一第一旋转。当线圈2-330接收到回归信号时,驱动组件2-300驱动活动部2-200相对固定部2-100以第一转轴2-c1为轴心进行一第二旋转。第一旋转的角速度的绝对值与第二旋转的角速度的绝对值不同,更详细地说,第一旋转的角速度的绝对值小于第二旋转的角速度的绝对值。因此,上述行进信号与回归信号形成的波形可为一锯齿波。
104.然而,活动部2-200相对固定部2-100以第一转轴2-c1为轴心转动也可以不借由上述共振频率相同的驱动方式,在一些实施例中,也可以采用与图1以及图2的实施例中驱动第一光学元件2-pr转动类似的方式,利用施加电流至线圈2-330,使第一磁性单元2-310、第二磁性单元2-320与线圈2-330之间产生电磁驱动力,而驱动活动部2-200以间接步进的方式相对固定部2-100以第一转轴2-c1为轴心进行第一旋转。
105.驱动组件2-300可以配置以同时驱动活动部2-200相对固定部2-100在第一维度运动以及驱动承载座2-210相对框架2-220在第二维度运动,更详细地说,借由控制组件同时输入第一驱动信号以及第二驱动信号至线圈2-330,驱动组件2-300可以驱动活动部2-200相对固定部2-100在第一维度运动,并且同时驱动承载座2-210相对框架2-220在第二维度运动。
106.发射元件2-tx将光线2-l1入射至上述实施例的光学元件(第一光学元件2-pr以及第二光学元件2-r1、或光学元件2-10),而借由控制两个光学元件或是一个光学元件在两个轴上的运动,使得由光学元件反射的光线2-l可以在物体2-o形成一扫描范围。也就是说,控制光学元件的转动角度范围可以进而控制扫描范围。
107.发射元件2-tx可以一脉冲波的形式发射光线2-l1,并且如前所述第一驱动信号以及第二驱动信号的可具有不同的波形,在第二驱动信号为正弦波的一些实施例中,由于正弦波的特性,使得承载座2-210在角度范围内旋转时,转动至中间角度的速度较转动至两旁角度的速度快,进而使得经由光学元件反射的光线在扫描范围的中间部分少于两旁部分,而导致扫描范围中间部分的解析度较两旁部分来的差。
108.为了解决上述的问题,当驱动组件2-300驱动承载座2-210相对框架2-220在第二维度上于一周期内运动时,也就是旋转角度范围一次时,发射元件2-tx可以至少两个以上的频率发射光线2-l1。在一些实施例中,可以借由将发射元件2-tx发射的光线2-l1设定为两种频率以分别对应扫描范围的中间部分与两旁部分,更详细地说,在扫描速度较快的中间部分发射较高频率的光线2-l1,使得反射到扫描范围的中间部分与两旁部分的光线2-l1数量接近,而改善解析度。
109.而扫描范围除了可以借由控制光学元件2-10的转动角度范围而控制以外,也可以借由光学元件2-10控制。接着请参考图8至图10,说明光学元件2-10如何控制扫描范围,图8为本公开另一实施例的光学元件2-10的侧视图。图9为本公开另一实施例的光线2-l1的一出射角度2-θe随一界面角度2-θc改变的示意图。图10为本公开另一实施例的光线2-l1在一光学元件2-105中行进的示意图。须注意的是,虽然以下描述以图5中的光学元件2-10作为示例,但不限于用于图5的光学元件驱动机构,可视需求而改变,例如取代图2中的第二光学元件2-r1。光学元件2-10可以包括一第一透镜2-11以及一反射元件2-12,反射元件2-12设置于第一透镜2-11与承载座2-210之间。第一透镜2-11包括一第一介质2-n1以及一第二介质2-n2,第二介质2-n2较第一介质2-n1更接近反射元件2-12,沿着平行于主轴2-m的方向观察时,第一介质2-n1与第二介质2-n2至少部分重叠。第一介质2-n1的折射率不同于第二介质2-n2的折射率,更详细地说,第一介质2-n1的折射率小于第二介质2-n2的折射率。
110.在一些实施例中,第一透镜2-11可为一液态透镜,第一介质2-n1可为一封装液(例如,醇类溶液),第二介质2-n2可为一透镜液(例如,硅油),由于第一介质2-n1与第二介质2-n2不互溶,因此第一介质2-n1与第二介质2-n2之间具有一第一界面2-i1。此第一界面2-i1具有一曲率2-c,借由此曲率2-c,如图8中虚线框出放大示意图所示,使得光线2-l1的出射角度2-θe大于入射角度2-θi,因此,相较于仅以平面状的反射元件2-12作为光学元件直接反射光线2-l1,本公开实施例的光学元件2-10可以放大出射角度2-θe,因而在控制光学元件的转动角度范围为相同的情况下,使用本公开实施例的光学元件2-10可以达到更大的扫描范围。
111.此外,可以借由电路构件2-600连接至第一透镜2-11而驱动第一界面2-i1变形,更详细地说,借由施加电压第一界面2-i1会产生介电力,介电力作用方向会由具高介电常数的醇类溶液往具低介电常数的硅油挤压,而改变第一界面2-i1的曲率2-c。如图9所示,施加电压后的第一界面2-i1(实线)与施加电压前的第一界面2-i1(两点链线)相差一界面角度2-θc,曲率2-c也由曲率2-c0增加为曲率2-c1,进而使得光线2-l1的出射角度2-θe大于改变
前的出射角度2-θe。因此可借由施加高电压增加曲率2-c,进而达到更大的扫描范围,相对地,也可以借由施加低电压降低曲率2-c,进而完成较小的扫描范围。
112.除了上述经由电路构件2-600施加一电压到光学元件2-10,以一化学性方式改变第一界面2-i1的曲率2-c的外,由于第一介质2-n1与第二介质2-n2不限于上述液体的构成,也可以包括固体、气体等的构成。因此也可以设置一压电机构(未图示)连接光学元件2-10,借由压电机构2-以一物理性方式改变第一界面2-i1的曲率2-c,更详细地说,可以在第一透镜2-11下方设置一压电片,借由压电片通电后变形而挤压第一透镜2-11,进而改变第一界面2-i1的曲率2-c。也就是说,可以经由化学性方式或是物理性方式两者中的至少一种方式控制曲率2-c,进而控制经由光学元件2-10出射的光线2-l1的出射角度2-θe。
113.此外,第一透镜2-11可以包括更多数量的介质,或者光学元件2-10可以包括更多透镜,皆可视需求而改变。例如在另一些实施例中,如图10所示,第一透镜2-11可以还包括一第三介质2-n3,第三介质2-n3较第一介质2-n1更接近反射元件2-12。第二介质2-n2与第三介质2-n3之间具有一第二界面2-i2,且第一界面2-i1与第二界面2-i2不平行。第一介质2-n1与第三介质2-n3之间具有一第三界面2-i3,且第二界面2-i2与第三界面2-i3不平行。沿着平行于主轴2-m的方向观察时,第一介质2-n1与第三介质2-n3至少部分重叠。沿着垂直于主轴2-m的一方向观察时,第二介质2-n2与第三介质2-n3至少部分重叠。借由介质间不同的折射率的配置而改变出射角度2-θe,进而控制扫描范围,例如,设置使第一介质2-n1的折射率小于第二介质2-n2的折射率,并且第二介质2-n2的折射率小于第三介质2-n3的折射率,使得出射角度2-θe放大,进而扩大扫描范围。
114.综上所述,借由驱动组件2-300控制活动部2-200相对固定部2-100在第一维度运动,进而控制由光学元件2-10反射的光线2-l1形成的扫描范围,并且借由驱动组件2-300控制承载座2-210相对框架2-220在第二维度运动,也进而控制由光学元件2-10反射的光线2-l1形成的扫描范围。在一些实施例中,反射的光线2-l1可以形成矩形形状的扫描范围,当进行上述的第二维度运动一个周期时,多个反射的光线2-l1在物体2-o上形成多个光点,其密集程度可视为在矩形的长边方向上形成一扫描光线。而当进行上述的第一维度运动一角度时,则在矩形的短边方向形成扫描光线之间的间距,通常间距越小,扫描解析度越高。因此,控制第二维度运动可以控制扫描范围的长边的大小,控制第一维度运动可以控制扫描范围的短边的大小,并且可以借由上述光学元件2-10不同的设计,而控制扫描范围的长边以及/或短边的大小。
115.此外,也可借由光学元件2-10改变光线2-l1截面积的形状,进而改变扫描时间,例如通过光学元件2-10后反射的光线2-l1的截面具有椭圆形状,且椭圆形状的长轴与上述扫描范围的长边垂直,如此一来,扫描线的间距可以设定较大而维持相近的解析度,但扫描时间却可以大幅减少。
116.在一些实施例中,可以将多个光学元件驱动机构2-1沿着一第三方向排列而组合成一光学系统,其中每一个光学元件驱动机构2-1分别输出不同的信息,再经由一运算单元将每一个光学元件驱动机构2-1输出的信息整合为最终信息,换句话说,若要扫描的物体2-o范围很大,可以使每一个光学元件驱动机构2-1分别扫描前述物体2-o的部分范围,最终再借由运算单元得到物体2-o整体范围的信息,相较于一个光学元件驱动机构2-1扫描物体2-o的整体,上述这样的光学系统,可以得到更佳的解析度。
117.如上所述,本公开实施例提供了一种光学元件驱动机构,具有一主轴,包括一活动部、一固定部、一驱动组件、以及一第一连接组件。活动部连接一光学元件,并且相对于固定部可运动,驱动组件驱动活动部相对固定部运动。活动部经由第一连接组件活动地连接固定部。其中借由驱动组件控制活动部相对固定部在不同维度的运动,进而控制由光学元件反射的光线形成的扫描范围,并且借由光学元件控制扫描范围,进而可以得到一种低成本而高效能的光学感测系统。本公开所公开的各元件的特殊位置、大小关系不但可使光学元件驱动机构达到特定方向的薄型化、整体的小型化,另外经由搭配不同的光学模块可以使光学元件驱动机构更进一步提升光学品质(例如深度感测精度等)。
118.虽然本公开的实施例及其优点已公开如上,但应该了解的是,任何所属技术领域中具有通常知识者,在不脱离本公开的精神和范围内,当可作更动、替代与润饰。此外,本公开的保护范围并未局限于说明书内所述特定实施例中的制程、机器、制造、物质组成、装置、方法及步骤,任何所属技术领域中具有通常知识者可从本公开揭示内容中理解现行或未来所发展出的制程、机器、制造、物质组成、装置、方法及步骤,只要可以在此处所述实施例中实施大抵相同功能或获得大抵相同结果皆可根据本公开使用。因此,本公开的保护范围包括上述制程、机器、制造、物质组成、装置、方法及步骤。另外,每一权利要求构成个别的实施例,且本公开的保护范围也包括各个权利要求及实施例的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1